
基于毫米波雷达的跌倒方式实时检测方法研究
2022-03-07 06:58孙济舟于大泳
软件导刊 2022年2期
孙济舟,于大泳
(上海理工大学 机械工程学院,上海 200093)
0 引言
人口老龄化已经成为世界各国普遍存在的社会问题,随着年龄增长,身体机能开始逐步衰退,感官和认知能力逐渐丧失,容易因功能受损造成死亡。据世界卫生组织统计,世界各地每年估计有64.6 万人因跌倒受伤而死亡,其中65 岁以上的老人占比最大。及时发现跌倒并提供医疗救援能控制伤势进一步发展,对于老年人的身体健康和生命安全而言,具有重要意义。因此需要在老年人容易跌倒的场所进行准确、有效的跌倒检测。
由于不同跌倒方式对身体造成的伤害不同。从站立高度跌倒时,若骨盆与地面发生碰撞,极易造成髋部骨折和脊柱压缩性骨折。其中,髋部骨折会引起呼吸系统感染、泌尿系统感染、深静脉血栓、急性肾衰竭等并发症从而危及生命。相对于常规治疗,手术治疗能减轻部分并发症对伤者的影响,使伤者能更快恢复活动能力,从而节省高昂的治疗费用并缩短治疗周期。老年人在弯曲膝盖时,容易因肌肉力量退化无法支撑身体而失去平衡,生活中较为常见的有蹲下时跌倒、起身时跌倒等。蹲下时向后跌倒臀部与地面发生碰撞,髋部骨折的风险较高,而起身时向前跌倒通常膝盖、大腿、手肘等部位着地,该部位骨折后容易愈合,不会产生直接危及生命的并发症,救援紧急程度较低。因此,检测跌倒的同时,识别跌倒方式有助于确定撞击部位并估计该部位的受损程度,以此决定是否需要紧急救治。
目前已有多种方法实现跌倒检测,并能区分跌倒事件与日常活动。当跌倒检测系统工作时,通过穿戴式传感器或环境传感器采集被监测对象的运动状态和生命体征数据,然后从数据中提取能够被计算机识别的数字特征用于判断是否跌倒。在各种环境传感器中,雷达传感器不会影响用户日常活动,能充分保护用户的隐私,因此有大量学者深入研究基于雷达传感器的跌倒检测方法。
跌倒事件一般具有先突然加速,后缓慢减速的特征。为了能检测速度的变化特征,通过雷达进行跌倒检测时,通常要先对原始数据进行适当转换和预处理,然后提取携带速度信息的数字特征。例如通过频谱图表示利用短时傅里叶变换、小波变换等方法获取的雷达接收信号能量在时频域内的分布规律,然后从图中提取频率幅值、频率比值、持续时间等特征作为分类算法的输入,或利用图像处理技术将频谱图转换为二值图像或灰度图像后进行下一步分析。除速度变化外,目标在运动过程中的距离变化也可作为跌倒的判断依据,Baird 等利用位置信息实现了人体姿势分类,但仅限于站立、坐下、躺下三种姿势,并未涉及跌倒。Sun 等通过快速傅里叶变换获取目标的距离和角度信息,将其作为跌倒的判断依据,但未进行跌倒方式识别。Erol 等综合考虑了速度和距离信息,使算法辨识效果优于将速度作为单一依据的算法。近年来,各种机器学习方法被广泛应用于动作识别和分类中,决策树、支持向量机、人工神经网络等智能算法均能实现跌倒判断,但并未对跌倒方式进行识别。
由于不同跌倒方式造成的损伤决定了医疗救援的紧急程度,因此有必要在检测发生跌倒事件后,判断被监测对象的跌倒方式,并持续跟踪跌倒后的身体活动。基于此,本文提出一种简单、有效的实时跌倒检测和跌倒方式识别算法,通过毫米波雷达获取目标的位置信息,采用平滑滤波算法和分段线性拟合方法处理原始数据,综合考虑人体跌倒时在高度方向和水平方向的位置变化规律及两者之间的对应关系,基于多个阈值在检测到跌倒行为后对跌倒方式进行识别,若发现目标损伤情况严重无法行动,则立即发出警报。
1 跌倒检测和跌倒方式识别算法
毫米波雷达通过通用异步收发传输器(Universal Asynchronous Receiver∕Transmitter,UART)将采集的点云数据和目标信息输入计算机进行跌倒检测。其中,点云数据包含所有散射点的位置和速度,目标信息包含被监测对象的位置、速度和加速度。为方便描述各散射点和目标的位置信息,建立固连于雷达的坐标系如图1 所示。其中Z 轴、Y轴分别表示高度方向和水平方向。散射点和目标位置依据位于原点的距离和角度确定,即由极坐标进行描述,因此需要将散射点和目标坐标由直角坐标转换为极坐标。此外,雷达在安装时存在一定的俯仰角,需要先对位置向量进行绕X 轴的旋转变换,再将变换后的位置坐标作为跌倒检测算法的输入。
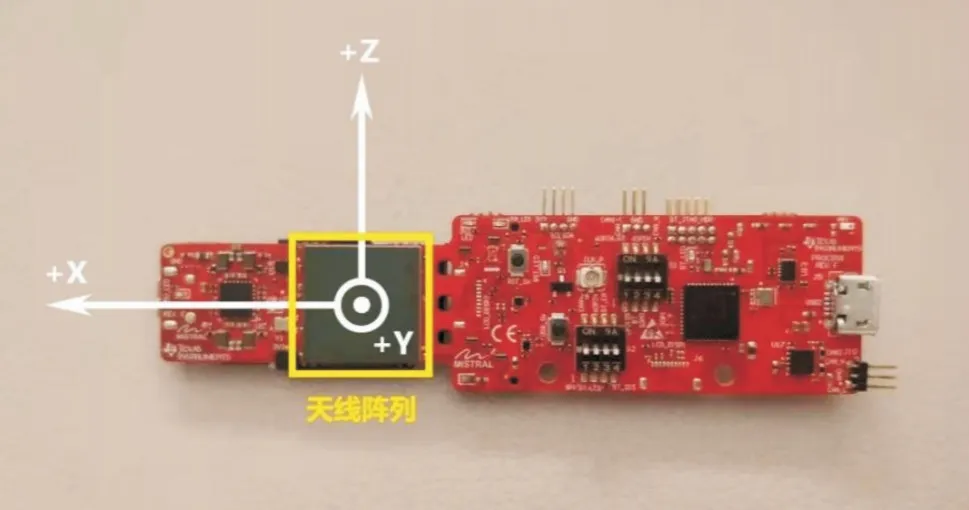
Fig.1 Radar coordinate system图1 雷达坐标系
在实际生活中,老人的行为通常由一系列动作构成。为了实现实时监测,系统将每秒读取目标的位置坐标并进行数据处理,根据位置坐标的变化分割动作序列,根据阈值判断当前动作是否为跌倒行为,若识别为跌倒行为则进一步判断跌倒方式,一旦确认目标跌倒且无法行动时,则立即发出警报;若为非跌倒行为则判断当前动作属于何种日常行为。每次判断后将已记录的数据从缓存中清除,直至被监测对象的状态趋于稳定后开始进行下一个动作判断。
跌倒检测和分类的流程如图2 所示,在开始判断跌倒行为前,需要通过均值滤波对离散数据进行平滑处理并计算目标的静止时间,当检测目标倒地一段时间后,对采集的数据进行拟合并求解拟合函数中的待定参数。

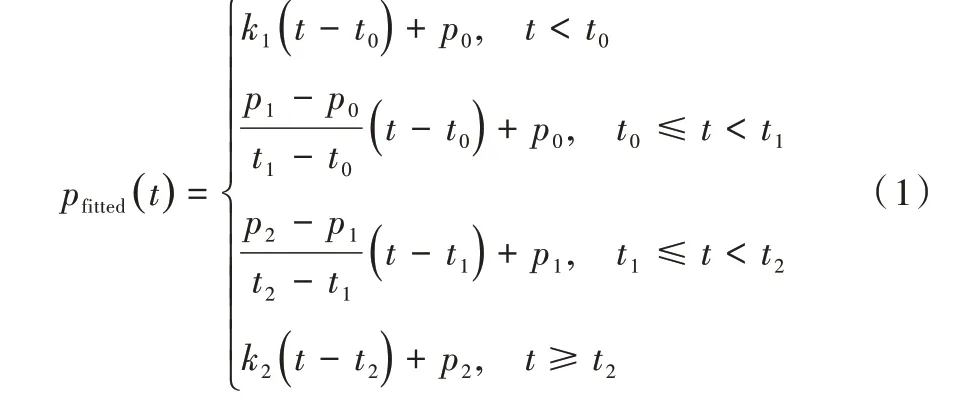
t
代表时间,t
、t
、t
分别为第一、第二和第三阶段的终止时刻,p
、p
、p
分别为t
、t
、t
时刻目标的位置,k
、k
分别为第一、第四阶段曲线的斜率。
Fig.2 Flow of detection and classification图2 检测和分类流程





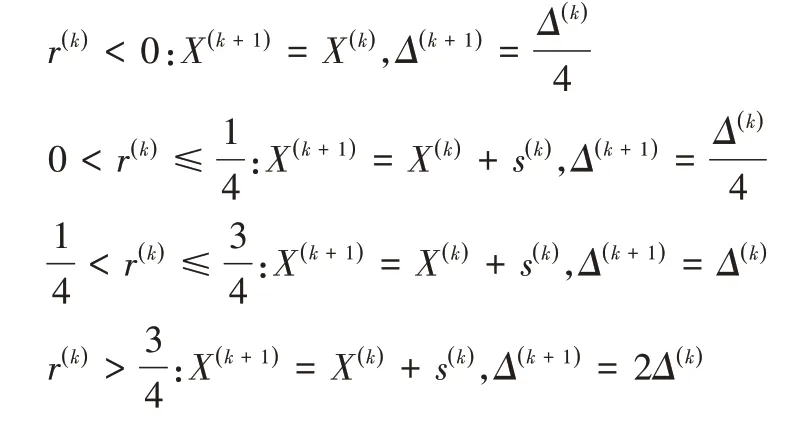
s
是第k
次迭代的试探步长,Δ
是第k
次迭代的信赖域半径。信赖域反射算法的迭代过程如下:

Δ
X
后,利用向量参数计算被监测对象在高度、水平方向的平均速度和水平距离变化量,作为后续检测和识别的依据。(1)跌倒行为检测:若高度、水平方向的平均速度均超过基础阈值则判定为跌倒;若其中任意一个方向的平均速度未超出基础阈值则判定为非跌倒,同时利用水平距离变化量区分蹲下、躺下、趴下行为。
(2)跌倒方式识别:在检测跌倒行为后,若位置变化阶段内出现高度方向的平均速度小于零,水平方向的平均速度约等于零,则判定为蹲下时跌倒;若整个位置的变化阶段中高度方向的平均速度均小于零,水平方向平均速度均大于零,则判定为起身时跌倒;若高度方向的平均速度超出进阶阈值,则判定为行走时跌倒。
2 实验和数据采集
老年人因身体平衡能力、稳定性和协调性下降,在家中活动时可能会发生跌倒,因此有必要在真实居住环境中进行实验,室内环境如图3-图4 所示。在雷达传感器的检测范围内布置座椅、餐桌、橱柜等家具,实验针对仅有一位老人在监测区域内活动的情形,目的是为了验证检测方法能否实时、准确、有效地检测跌倒,并在此基础上进一步识别跌倒方式。
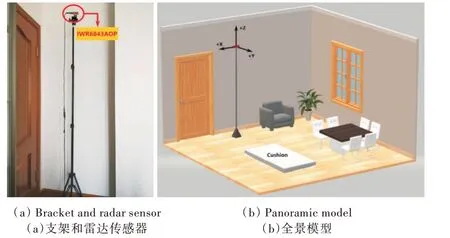
Fig.3 Experimental environment图3 实验环境
实验使用的设备主要包括:计算机、IWR6843AOP 雷达传感器、用于安装固定雷达传感器的支架、数据线和帆布垫。雷达的调谐频率为60~64GHz,增益为5dBi,总共有3个发射天线和4个接收天线,方位面和俯仰面的视野范围均为±60°,角度分辨率均为29°。为了使雷达检测范围尽可能覆盖被监测对象全身,将雷达传感器的安装高度调整至2m 左右,俯仰角约为30°。
Table 1 Experimental actions表1 实验动作
选择6 名实验对象,2 位年轻人和4 位中年人(2 名男性和2 名女性)。设计实验动作如表1 所示,除蹲下外所有动作均沿着远离雷达的方向进行,蹲下、躺下、趴下的高度变化量与跌倒较为相近,而行走时跌倒、蹲下时跌倒、起身时跌倒为常见的跌倒方式。为保证实验对象的安全,在空旷区域进行实验,跌倒过程中身体并未与家具或其他物品发生碰撞,图4 为同一实验对象模仿老人不同跌倒行为时的场景。
3 数据处理结果与分析
图5-图7 分别表示同一实验对象行走时跌倒、蹲下时跌倒和起身时跌倒的实时数据和处理结果,即实时更新的位置坐标随时间的变化曲线(蓝色曲线)和当目标倒地一段时间后绘制的拟合函数曲线(红色曲线)(彩图扫OSID 码可见,下同)。图5-图7 表明信赖域反射算法拟合的结果能准确显示目标的运动规律,通过计算位置变化阶段的斜率可取得目标高度、水平方向的平均速度,另外位置恒定阶段截距的差值能反映目标位置的变化量。
如图5-图7 所示,跌倒相对于蹲下、躺下、趴下等日常行为而言,在高度方向上具有较大的平均速度,因此将高度方向的平均速度是否超出阈值作为判断跌倒的依据。实验结果表明,部分实验对象在蹲下时高度方向的平均速度非常接近甚至超过跌倒时的平均速度,这将导致跌倒检测算法误判,因此需要综合考虑高度和水平方向位置的变化。
通常情况下,跌倒时高度方向和水平方向均存在较大的平均速度;躺下或趴下时水平方向的平均速度比跌倒时小;蹲下时水平方向的平均速度比躺下或趴下时小。因此,将高度和水平方向的平均速度同时超出阈值作为判断跌倒的依据将更可靠。

Fig.4 Experimental actions图4 实验动作

Fig.5 Real-time data recording and processing of falls while walking图5 行走时跌倒的实时数据记录与处理
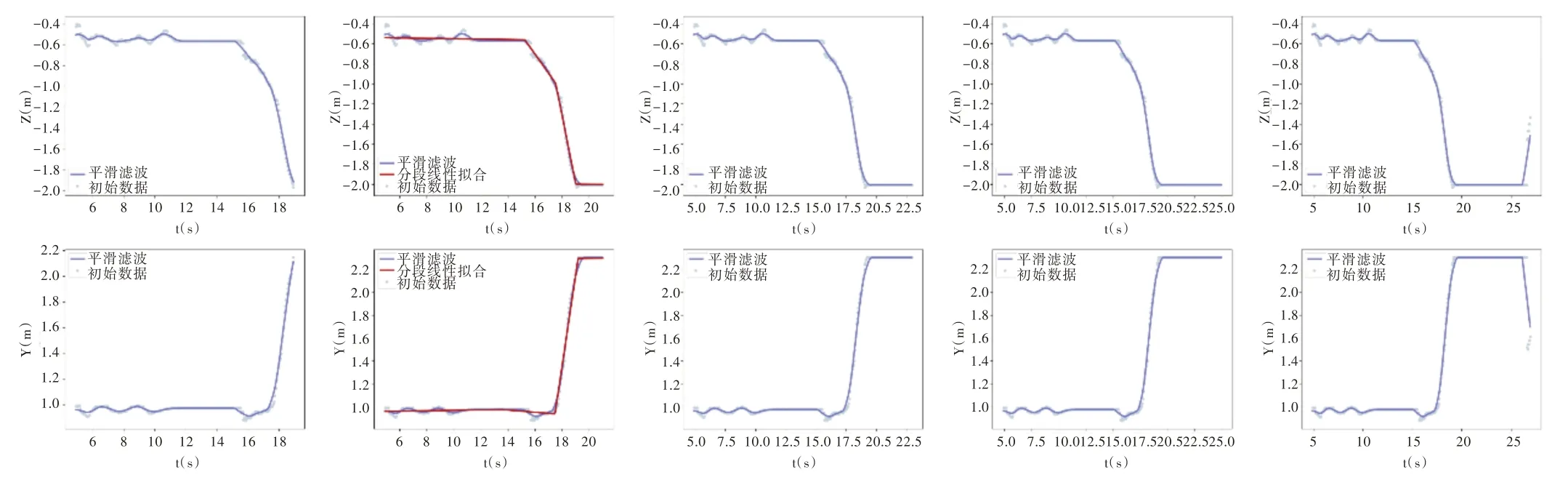
Fig.6 Real-time data recording and processing of falls while crouching图6 蹲下时跌倒的实时数据记录与处理

Fig.7 Real-time data recording and processing of falls while rising图7 起身时跌倒的实时数据记录与处理
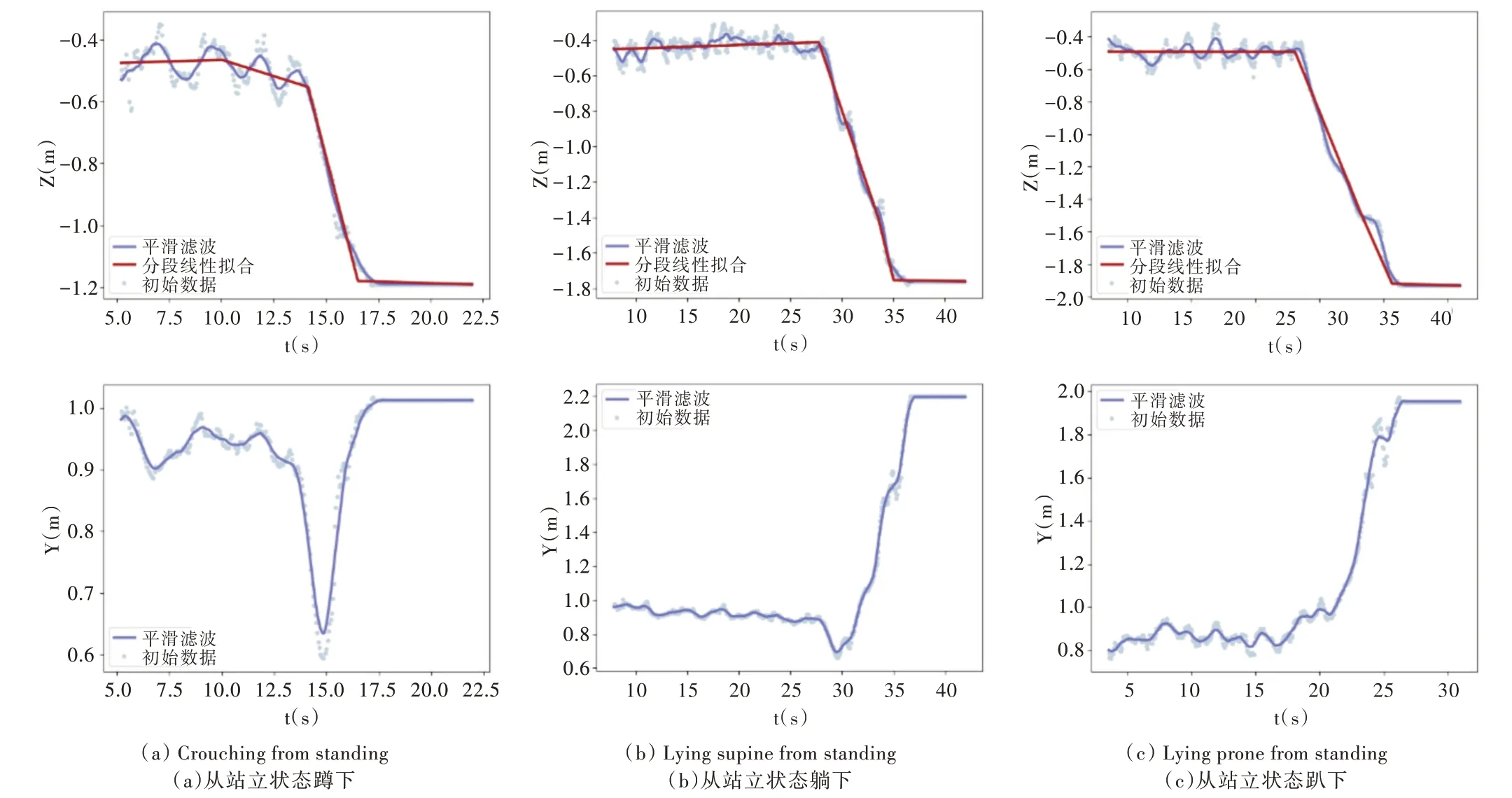
Fig.8 Position change patterns of daily activities图8 日常活动的位置变化规律
如图6 所示,蹲下时跌倒在位置变化阶段,存在高度方向平均速度小于零而水平方向平均速度约等于零的区间。如图7 所示,起身时跌倒在位置变化阶段内高度方向平均速度始终小于零,而水平方向平均速度始终大于零。通过实验验证综合考虑跌倒时人体在高度和水平方向的运动可更好识别跌倒方式。
图8 显示了同一实验对象从站立状态蹲下、躺下、趴下时高度和水平方向位置坐标的变化规律,其中灰色圆点代表雷达由UART 接口传送到计算机的初始数据,蓝色曲线代表平滑滤波后的数据,红色曲线代表分段线性拟合后的数据。由图8 可见,蹲下、躺下、趴下在高度方向上的位置变化规律非常接近,但蹲下时的最大水平距离变化量明显小于躺下或趴下,因此可依据水平距离变化量识别蹲下行为。
抽取60%的样本数据用于确定高度方向和水平方向平均速度的基础阈值,在0~1 范围内以0.01 的步长进行遍历,使平均速度高于阈值的跌倒样本数与平均速度低于阈值的非跌倒样本数之和最大,余下样本将用于检验跌倒检测算法的准确性和有效性。


Fig.9 Sample data图9 样本数据
同理可确定平均速度进阶阈值和水平距离变化量阈值,如图9 所示。实验表明,当仅以高度方向的平均速度超出阈值作为判断依据时,检测准确率为80.8%;当以高度方向和水平方向的平均速度同时超出阈值作为判断依据时,检测准确率为95.4%。
如图10 所示,混淆矩阵清晰、直观地反映了跌倒检测算法分类的准确性。其中,类别1~3 分别为行走时跌倒、蹲下时跌倒和起身时跌倒,类别4 为蹲下,类别5 为躺下和趴下。当仅考虑高度方向平均速度时,行走时跌倒检测率为100%;由于蹲下时跌倒和起身时跌倒的平均速度较接近,因此分类效果较差,准确率分别为50%与45%。当同时考虑高度方向和水平方向的平均速度及水平距离变化量时,行走时跌倒检测率为100%;蹲下时跌倒和起身时跌倒的分类效果显著提高,准确率分别为85.71%与80%,但仍可能被误认为躺下或趴下,同理躺下或趴下也可能被误认为蹲下时跌倒或起身时跌倒,但日常活动被误认为跌倒的可能性明显降低。相对于单独考虑高度变化的判断方法,综合考虑被监测对象高度方向和水平方向的平均速度及水平距离变化量,使跌倒检测和跌倒识别的准确率分别提升14.6%与23.5%。
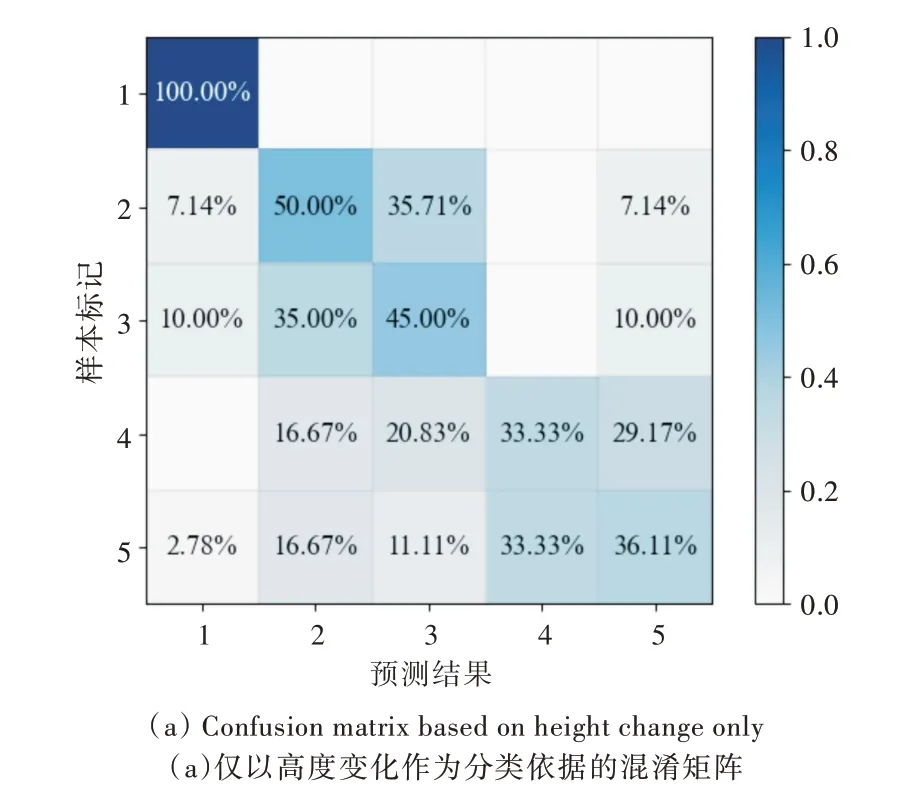
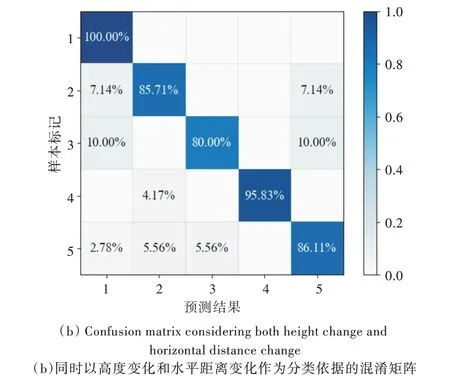
Fig.10 Confusion matrices of classification algorithms图10 分类算法的混淆矩阵
4 结语
本文提出的跌倒检测和跌倒方式识别方法简单有效,通过提取位移和平均速度等特征作为分类依据,可有效区分高度变化和跌倒相近的日常活动与跌倒事件,减少了误判,在一定程度上避免了医疗资源的浪费。而且,本文方法能在发生跌倒事件时进一步识别被监测对象的跌倒方式,有助于判断跌倒时身体的撞击部位和损伤程度。在本文涉及的跌倒方式中行走时跌倒造成的损伤最严重,该类样本被100%识别,即在最需要紧急救治的情况下,不会发生误判或漏判。
由于实验过程中充分考虑了实验对象的安全,所有实验动作均在空旷区域实现,未涉及与环境中其他物体发生碰撞的情况,然而在真实的跌倒过程中人处于失控状态,极可能与其他物体发生碰撞而产生不规则运动,因此需要进行特殊实验,未来将在后续研究中仔细探究其对检测效果的影响。此外,还将设计更多高度方向平均速度与跌倒相近的实验动作以测试分类算法的可靠性。
猜你喜欢
大自然探索(2023年7期)2023-08-15
制造技术与机床(2019年9期)2019-09-10
小学生学习指导(低年级)(2018年12期)2018-12-29
西南交通大学学报(2018年6期)2018-12-18
河北遥感(2017年2期)2017-08-07
衡阳师范学院学报(2016年3期)2016-07-10
火控雷达技术(2016年3期)2016-02-06
百科探秘·航空航天(2015年4期)2015-11-07
发明与创新(2015年26期)2015-02-27
