
微小行程单相圆筒型直线电机设计研究
2022-03-02 00:56陈薇薇戚振亚李听斌周奇慧
微特电机 2022年2期
吕 强,陈薇薇,戚振亚,李听斌,周奇慧
(中国电子科技集团公司第二十一研究所,上海 200233)
0 引 言
直线电机由于不需要任何中间转换机构就能输出直线运动机械能的优点,被广泛应用于交通运输、工业生产、医疗器械、航空航天等众多领域。在航天器设计中,不同的飞行任务或特殊的载荷机构常常需要一些定制化的特种电机。某航天器扫描机构中需要采用一种行程为0.07 mm的长寿命直线电机,并且要求其动子能够被动地跟随机构转动。本文研究了一种圆筒型直线电机,对于特殊领域的使用需求具有一定的参考意义。
直线电机种类繁多,从原理上讲,每一种旋转电机都有与之对应的直线电机[1]。文献[2]设计了一种斯特林制冷机用动铁式直线电机,如图1所示,通过单相绕组的正反通电可以实现动子的前后位移输出,但行程的实现需要依靠机械限位,在频繁的撞击磨损下行程会逐渐增大,长期冲击环境下的结构稳定性也存在风险,难以保证扫描机构的长寿命要求。
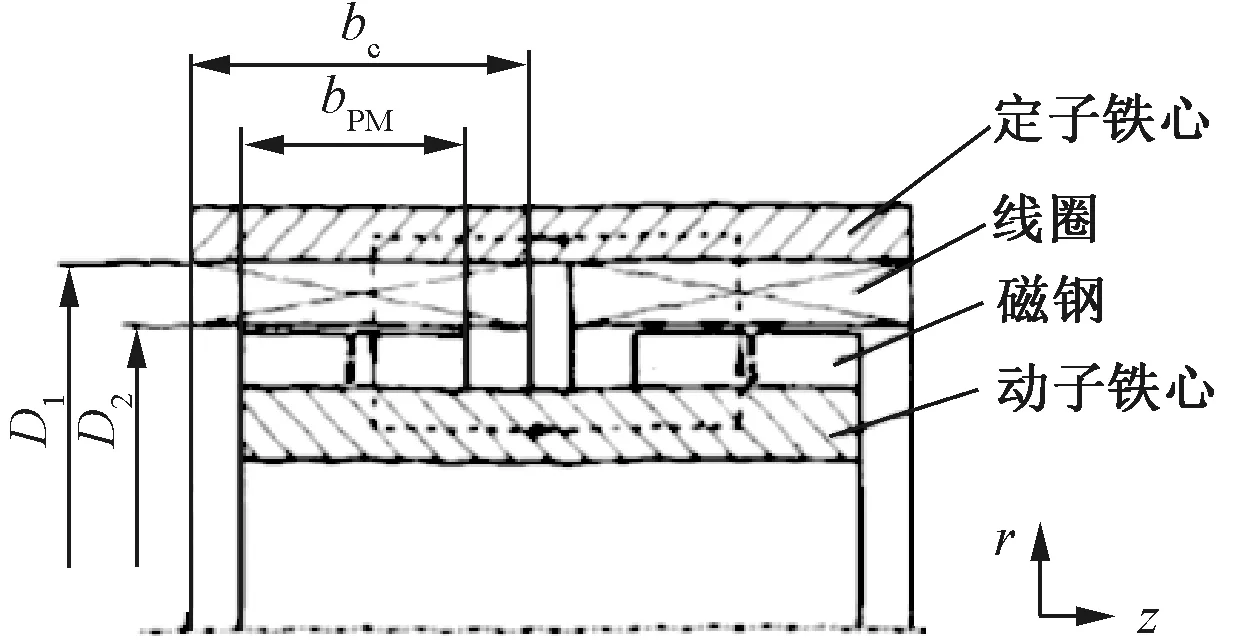
图1 斯特林制冷机用动铁式直线电机
文献[3]提出了一种错片结构微型直线步进电机,如图2所示。该电机采用传统的步进电机驱动控制方式实现直线位移输出,其行程并不依赖于机械限位,但作者的研究重点在其出力特性上,能否稳定实现0.07 mm的行程还有待验证。此外,这种直线步进电机沿轴向分相,至少需要两相绕组,因而轴向尺寸较大。

图2 圆筒型错片结构反应式直线步进电机
文献[4]对一2相8极混合励磁直线磁阻步进电机进行了电磁仿真。该电机转子与传统混合式步进电机转子类似,由2块铁心和中间的永磁体构成,但小齿是沿圆周方向的。定子小齿也是沿圆周方向分布的,并且不同极的小齿沿轴向错位,因此加工工艺性较差。电机结构示意图如图3所示。
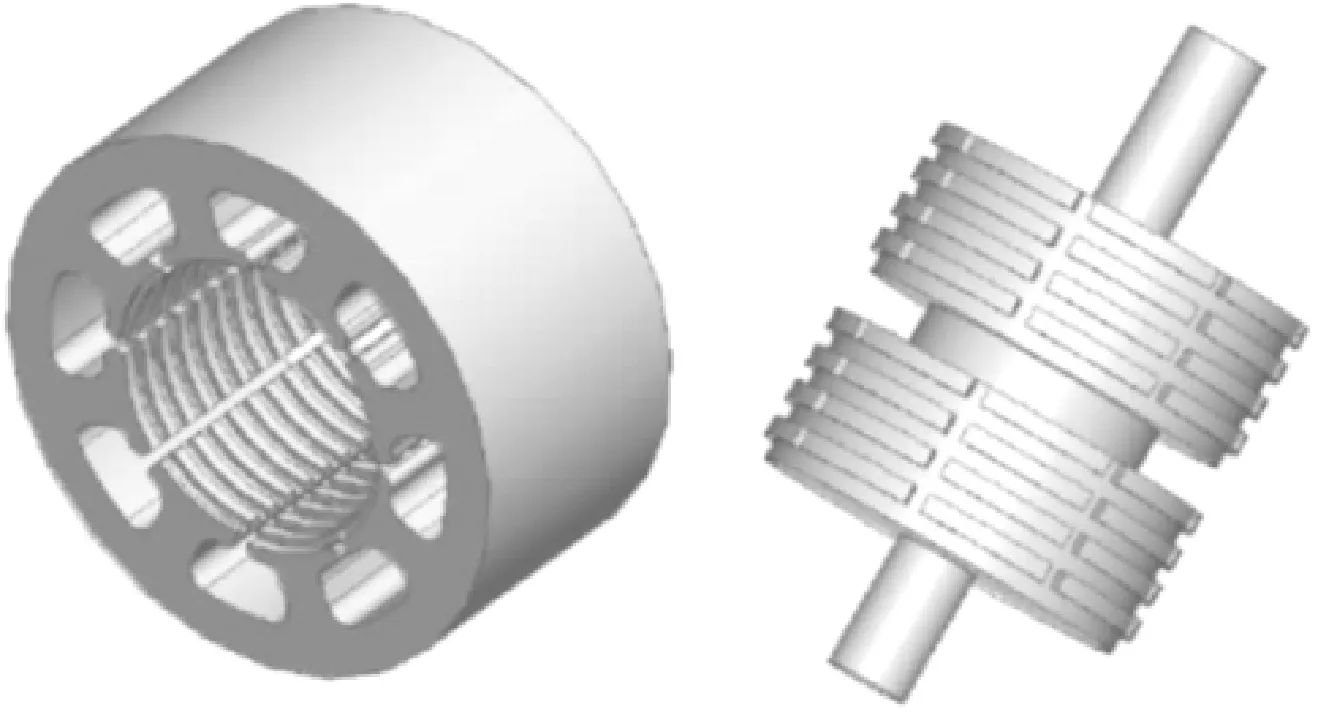
图3 圆筒式直线步进电机
针对航天任务特殊的应用需求,本文设计了一种微小行程的单相圆筒型直线电机。首先从磁路分析的角度论证其原理可行性,然后根据技术指标设计了相关电磁参数,并建立了有限元模型进行仿真计算,最后试制了样机进行实验验证。
1 原理分析
图4为本文设计的单相圆筒型直线电机电磁结构及工作原理示意图。电机主要组成部分包括定子铁心、定子绕组、永磁体和动子铁心,定子绕组为环形线圈,定子铁心s1、s2的间距等于动子铁心d1、d2的间距,且沿轴向错开一定距离δ,定子铁心s3、s4的间距等于动子铁心d3、d4的间距,且沿轴向反向错开距离δ,即左右两部分对称。其中,永磁体位置也可调整至动子部分的d1、d2之间和d3、d4之间。

图4 单相圆筒型直线电机工作原理
两段永磁体沿电机轴向充磁且方向相同,在电机内部形成两个方向相同的主磁场。绕组不通电时,电机左右两边机械和磁路均对称。动子左边部分受到定子向左的拉力F0,动子右边部分受到定子向右大小相同的拉力F0,动子在图4(a)所示位置稳定。
绕组通电时,动子位置还未开始改变瞬间,左边线圈1产生的磁场与磁钢的主磁场方向相反,合成磁场减弱,动子左边部分受到定子向左的拉力由F0瞬间减小至F1;右边线圈2产生的磁场与磁钢的主磁场方向相同,合成磁场增强,动子右边部分受到定子向右的拉力由F0瞬间增大至F2,于是动子受到向右的合力,开始向右移动。随着动子向右移动,左边定、动子铁心错开距离δ增大,气隙磁导减小,拉力F1逐渐增大;右边定、动子铁心错开距离δ减小,气隙磁导增大,拉力F2逐渐减小。当动子移动到某一位置时,左右拉力再次平衡,动子静止在新的稳定位置,该稳定位置与之前绕组未通电时稳定位置之间的距离即电机在相应电流下的行程。改变电流方向即可改变动子移动方向,改变电流大小即可改变动子移动距离。
线圈磁场与永磁体磁场方向相同时,气隙磁通可以表示:
(1)
式中:Hm为永磁体磁场强度;lm为永磁体轴向长度;N为线圈匝数;I为线圈电流;ls为定子铁心长;μs为定子磁导率;Ss为定子铁心截面积;δ0为等效气隙长度;μ0为真空磁导率;Sδ为等效气隙面积;ld为动子铁心长;μd为动子磁导率;Sd为动子铁心截面积。
线圈磁场与永磁体磁场方向相反时,气隙磁通可以表示:
(2)
式中:H′m为永磁体磁场强度;μ′s为定子磁导率;S′δ为等效气隙面积;μ′d为动子磁导率。
电机通电后动子还未开始动作时的推力,即最大推力:
(3)
式中:θ为定、动子之间作用力的合力与轴向分量之间的夹角。
由于动子还未开始动作,可以近似认为等效气隙面积不变,即Sδ≈S′δ。当磁场未饱和时μs≈μ′s,μd≈μ′d。因此式(3)可以简化表示:
(4)
式中:Rt为主磁路的总磁阻。
电机绕组施加某一恒定电流后,动子便开始移动一段距离。随着位移的增大,推力从最大值Ft开始下降,下降到零时动子结束移动,完成该电流下的行程动作。改变施加的绕组电流时,动子便从该位置移动到新的位置。动子在行程结束位置(即稳定位置)上受到负载扰动时会产生一定的位置偏移。当电机的行程一定时,Ft越大,推力-位移曲线在稳定位置附近的斜率越大,电机抗负载扰动的能力就越强。
2 电磁设计
根据扫描机构的设计要求,单相圆筒型直线电机的主要技术指标如表1所示。
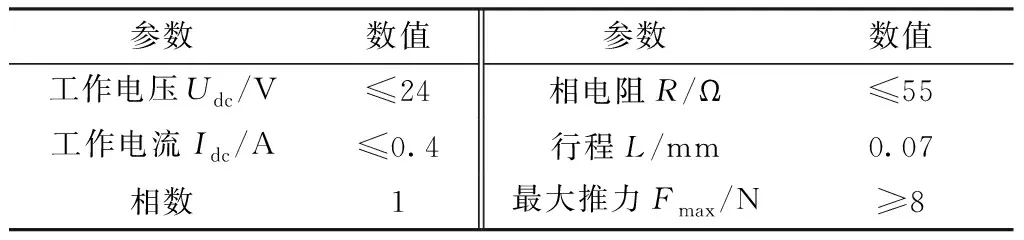
表1 直线电机主要技术指标
直线电机截面示意图如图5所示,其中位于定、动子各自中间的隔环为不导磁的铝合金材料。为提高电机推力和高低温环境适应性,定、动子铁心采用高饱和软磁合金材料1J22,永磁体采用2∶17的烧结钐钴永磁体,低温磁性能增强,高温退磁小,最高使用温度可达300 ℃。绕组采用聚酰亚胺漆包圆线QY-2/220,长期工作温度220 ℃。直线电机的主要设计参数如表2所示。
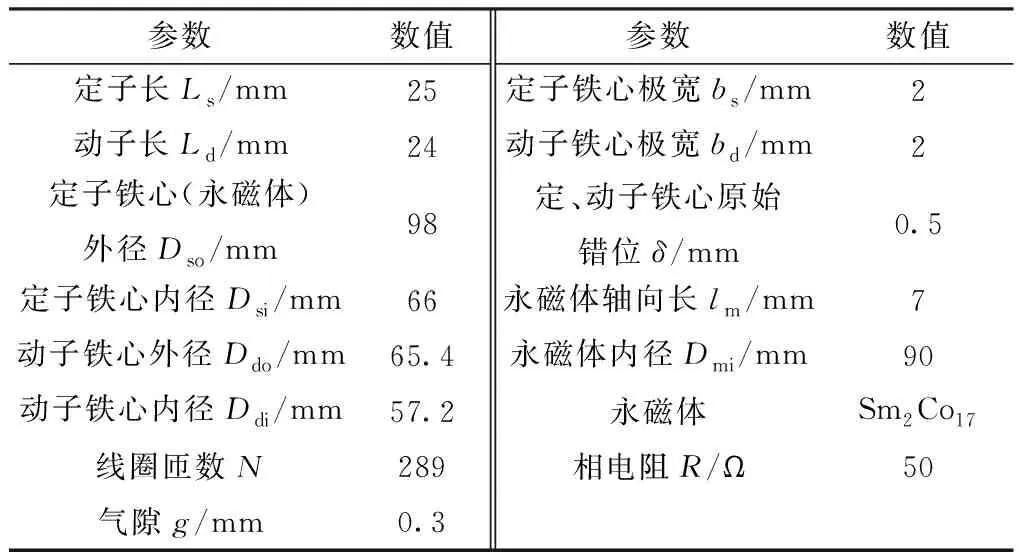
表2 直线电机主要设计参数

图5 直线电机截面示意图
建立圆柱坐标系,采用二维瞬态场对直线电机进行仿真分析,电机磁场分布如图6(a)所示。增大lm可使漏磁减少,推力变大,但永磁体用量会增加。为减少漏磁而不增加永磁体用量,可以保持永磁体长度不变,采用在定子铁心内侧增加与永磁体相同截面的铁心的方式。当两片定子铁心距离增加时,留给绕组的空间也会相应增加,从而增加安匝数,提高出力。当然,用铜量也相应增加。实际设计时,需要综合考虑,漏磁在可接受范围之内即可。
不同电流下的推力-位移曲线如图6(b)所示,横坐标0位移位置表示电机不通电时动子无约束下的自然位置。0电流的推力-位置曲线表示电机不通电时,外力将动子推至相应位置所需的推力。当绕组通0.105 A电流时,推力-位置曲线向负方向平移(反向通电时往正方向平移),稳定平衡位置,即推力为零的位置位于-26 μm处,表示绕组通0.105 A电流时动子往负方向运行25 μm。绕组电流增加时,推力-位置曲线继续平移,动子继续往负方向输出位移。当绕组电流增加至0.315 A时,输出位移-77 μm,达到指标要求的70 μm,且电流尚未超出指标要求的上限0.4 A。推力-位置曲线在横坐标零处的值即为最大推力。由图6(b)可知,0.315 A下的最大推力为8.9 N,满足技术指标要求。
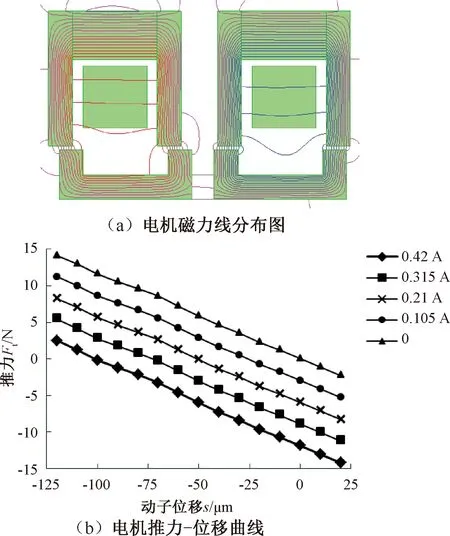
图6 直线电机有限元仿真结果
此外,从推力-位置曲线可知,在0.07 mm的微小行程范围内,电机输出位移随绕组电流呈现良好的线性关系。这为扫描机构实现简单的开环控制提供了便利。
3 实验测试
根据上述分析与设计,研制的圆筒型直线电机样机如图7所示。样机为分装式结构,定、动子通过实验机壳、实验端盖和实验转轴装配起来,保证气隙均匀度。实验机壳和实验端盖上装有滚珠直线轴承,以减小动子机械摩擦阻力,提高测试精度。
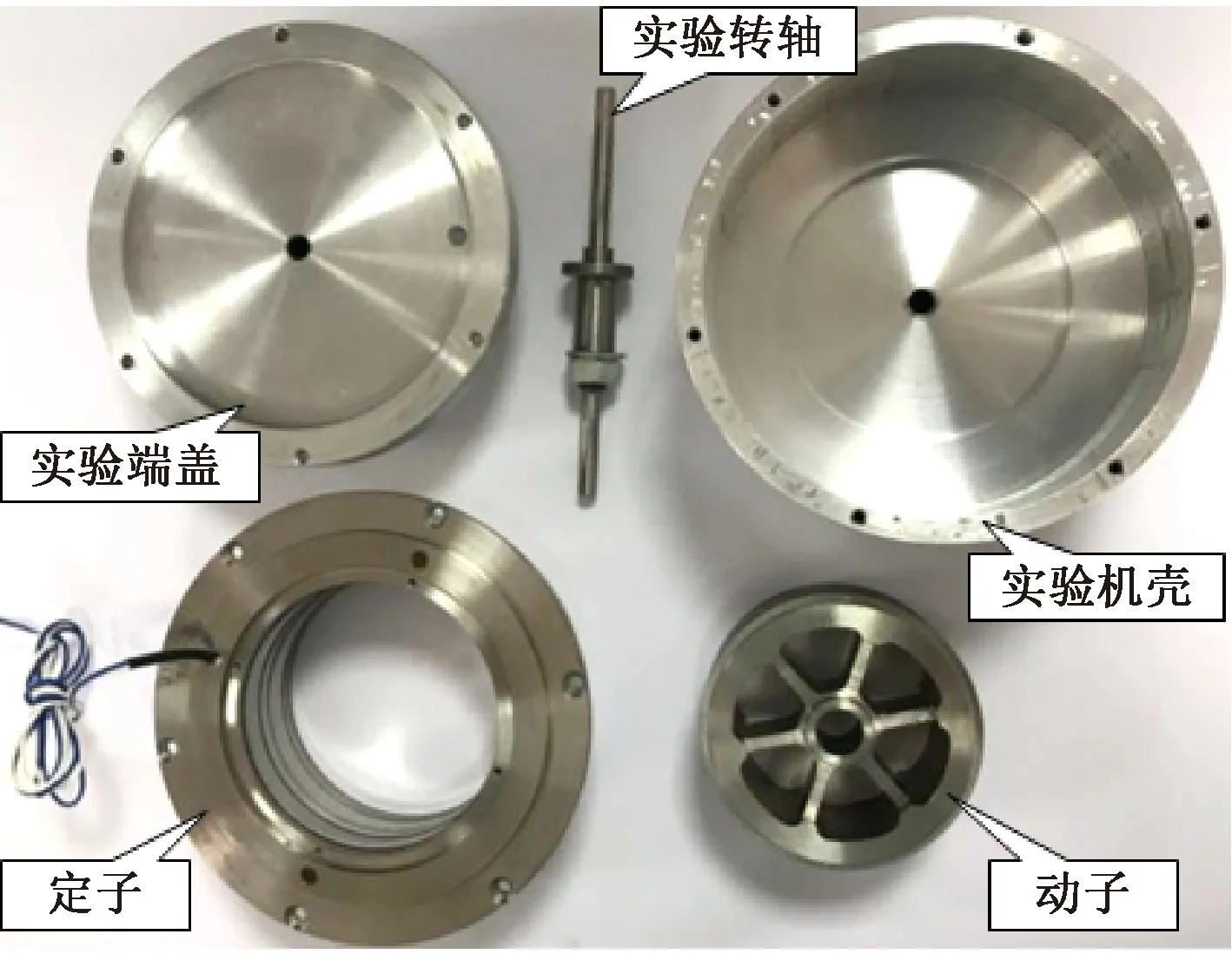
图7 圆筒型直线电机样机
电机主要技术指标测试结果如表3所示,其中行程和最大推力的测试平台如图8所示。测试时,将电机固定在平口钳上。千分表置于平口钳上,表头置于电机输出轴上并置零。电机绕组引出线与直流稳压电源相连。测量行程时,逐渐增加绕组电流至0.35 A,使输出轴往伸出方向移动,稳定后千分表的读数即为0.35 A下的行程。测量最大推力时,绕组通以0.35 A的电流,使输出轴往伸出方向移动,然后用推拉力计将输出轴往回顶,使千分表读数回到零,此时推拉力计的读数即为最大推力。
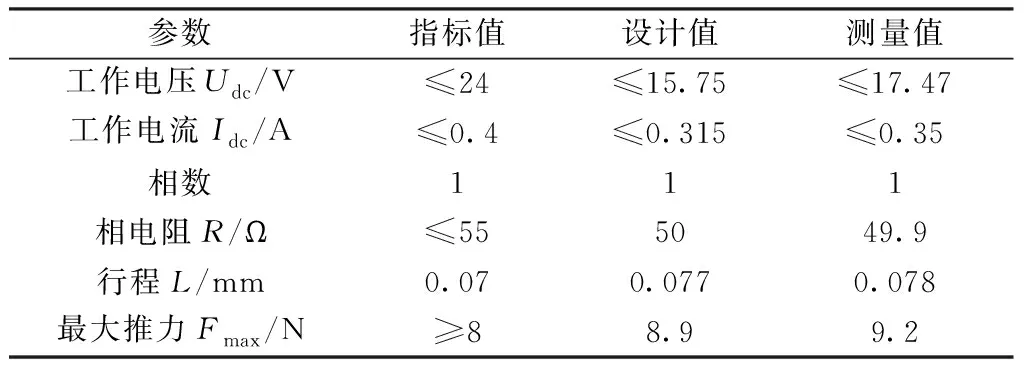
表3 主要技术指标测试结果
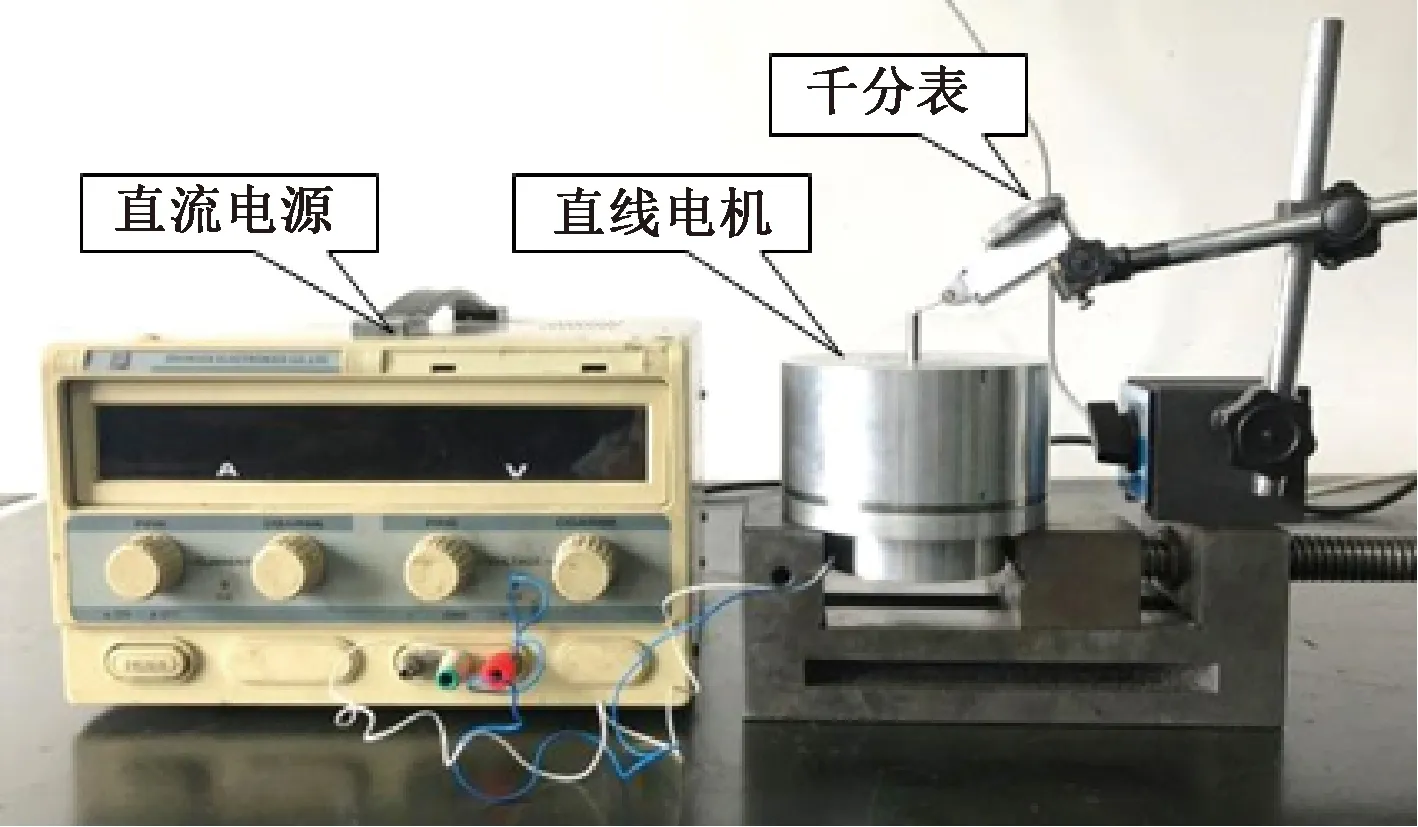
图8 直线电机测试平台
改变绕组电流,测量不同电流下的行程,即可得到电机位移-电流曲线,如图9所示。由图9可以看到,实测值略小于仿真值,且线性度弱于仿真值。由于测试时电机为垂直放置,分析考虑动子受到重力作用的影响。动子重力为负方向2.6 N的恒定力,负载线为一与横坐标平行的直线,仍处于线性区,因此2.6 N的重力作用不会使行程整体偏小,此偏差主要来自仿真计算的误差。另外,为测试其带负载后的特性,人为在输出轴上放置了50 g砝码,即测试带0.49 N负载的位移-电流曲线,如图9所示。可以看到带载和空载下的位移-电流特性无明显变化,电机在一定的负载阻力影响下输出位移稳定。
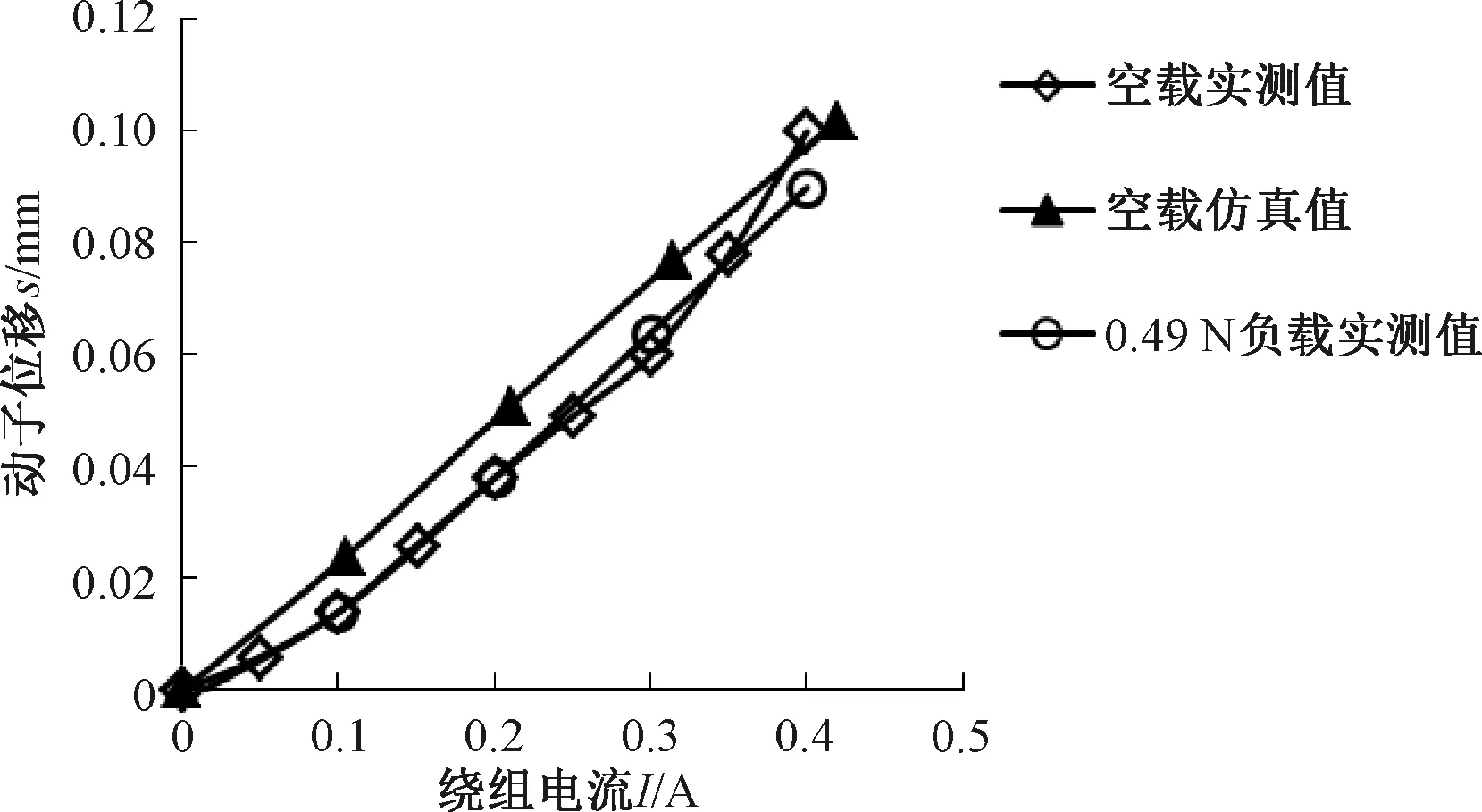
图9 电机位移-电流曲线
4 结 语
本文针对某航天扫描机构微小行程直线电机需求,设计并研制了一台单相圆筒型直线电机样机。基于磁路分析建立了直线电机的基本拓扑结构,并推导了最大推力的影响因素。根据需求指标进行了相应的电磁设计,采用有限元仿真初步验证了设计方案的可行性。经过样机的测试,进一步验证了这种新型单相圆筒型直线电机方案在微小行程输出时具有精密的输出特性,其位移-电流特性基本呈线性特征,控制方便,为微小行程直线电机设计方案提供了新的思路。
猜你喜欢
安徽理工大学学报(自然科学版)(2022年2期)2022-09-08
冶金设备(2022年1期)2022-06-10
电力电容器与无功补偿(2022年2期)2022-04-22
计算机仿真(2022年1期)2022-03-01
小读者(2021年5期)2021-11-22
防爆电机(2021年3期)2021-07-21
防爆电机(2021年1期)2021-03-29
数学大王·低年级(2020年8期)2020-08-14
科技视界(2020年19期)2020-07-30
作文中学版(2018年11期)2018-11-29
