一类具恐惧效应捕食者-食饵模型解的分歧
2022-03-01 14:07王欢,邢慧
哈尔滨商业大学学报(自然科学版) 2022年1期
王 欢,邢 慧
(西安工程大学 理学院,西安 710048)
最近的一项研究表明,果蝇对螳螂的恐惧会减少其进食和交配,进而使果蝇数量减少.如果一小群果蝇生活的环境中有螳螂的气味,这群果蝇“群灭”的可能性就增加了7倍.这说明对捕食者的恐惧可能会使食饵的数量有所减少.
近年来,一些学者也证实了被捕食者产生的恐惧会使其数量有所减少[1-3],且恐惧的影响程度远远大于捕食者的捕杀对食饵数量的影响.夏增琼等研究连续的恐惧效应对种群食物链的影响,并说明适当的恐惧效应会避免捕食者数量的爆发.SASMAL[5]提出了一类带有恐惧因子和Allee效应的捕食-食饵模型,获得了丰富的动力学模型.闫建博等[6]研究了B-D功能反应函数和Holling反应函数下的恐惧效应的捕食者系统.SWATI等[7]研究了一类带有交叉扩散和恐惧效应的捕食-食饵模型,说明了对捕食者的恐惧是捕食者与被捕食者相互作用的一个重要的驱动力.VANDANA等[8]分析了一个具有B-D功能反应的捕食-食饵相互作用模型,研究了跨临界分歧的稳定性和存在性.ZHANG等[9]对包含避难所的带有恐惧效应的捕食-食饵模型进行了研究.KUMAR等[10]研究了恐惧效应对三种群食物链的影响.
目前带有恐惧效应的捕食食饵模型是国内外学者研究的热点问题,许多学者己经对带有Holling型I类到IV类功能反应函数的捕食-食饵模型进行深入的讨论研究,并得了很多重要的研究结果[11-14].但对线性功能反应函数的研究较少,因此本文考虑线性功能反应函数下的带有恐惧效应的捕食食饵模型:
(1)
模型(1)的平衡态系统如下:
(2)
其中:Ω是Rn中边界光滑的有界开区域,常数r0,a,d,c,k,p,m均大于零,u为食饵的种群密度,v表明捕食者的种群密度,r0代表未受捕食者影响的食饵的出生率,k代表食饵对捕食者所产生的恐惧,d和m分别代表食饵和捕食者的自然死亡率,a是食饵的种内竞争因子,p是食饵和捕食者之间的有效接触率,c代表捕食者的捕食转化率.
1 预备知识
引理1[15]对于如下方程
(3)

(ⅰ)若λ1(-f(x,0))≥0,则系统(3)正平衡解不存在;
(ⅱ)若λ1(-f(x,0))<0,则系统(3)具有唯一的正平衡解;
(ⅲ)平凡解u(x)=0全局渐近稳定.
引理2[16](最值原理) 假设g(x,w)∈C(Ω×1),j=1,2,…,N.若满足Δw(x)+g(x,w(x))≥0(≤0),x∈Ω;∂w/∂v≤0(≥0),x∈∂Ω,

引理3[17](局部分歧定理) 设X,Y是Banach空间,U为R×Y中的开子集,f∈C2(U,Y),如果∀λ∈R,方程f(λ,u)有f(λ,0)≡0成立.若L1=Duf(λ1,0),L2=DlλDuf(λ1,0)满足
1)Ker(L1)=span(u0);
2)codimR(L1)=1,且dimN(L1)=1;
3)L2u0∉R(L1).
则存在δ>0和C1类曲线(λ,φ)∶(-δ,δ)→R×Z(Z=span{u0}⊥),使得:(ⅰ)λ(0)=λ0;(ⅱ)φ(0)=0;(ⅲ)∀|s|<δ,有f(λ(s),s(u0+φ(s)))=0此外,还存在(λ0,0)的邻域,使函数f的零点在它的邻域上,或者f有形如(λ0,0)的零点.
2 主要结果及证明
2.1 半平凡解的存在性
考虑方程
(4)
定理1 如果r0-d≤λ1,则u=0是系统(4)的唯一非负解;如果r0-d>λ1,则系统(4)有唯一正解θ,此时系统(2)有半平凡解(θ,0).
证明系统(4)的第一个式子可以写成形如-Δu=uf(x,u)的形式,则f(x,u)=r0-d-au,由引理1可得:
1)当λ1(-f(λ,0))≥0,即r0-d≤λ1时,系统(4)没有正平衡解,只有唯一的非负解u=0,且u=0全局渐近稳定.
2)当λ1(-f(λ,0))<0,即r0-d>λ1时,系统(4)有唯一正平衡解θ(x),且满足θ(x)<(r0-d)/a,x∈Ω.此时系统(2)存在半平凡解(θ,0),满足
(5)
2.2 解的先验估计
定理3 若方程(2)存在正解(u,v),则(u,v)满足
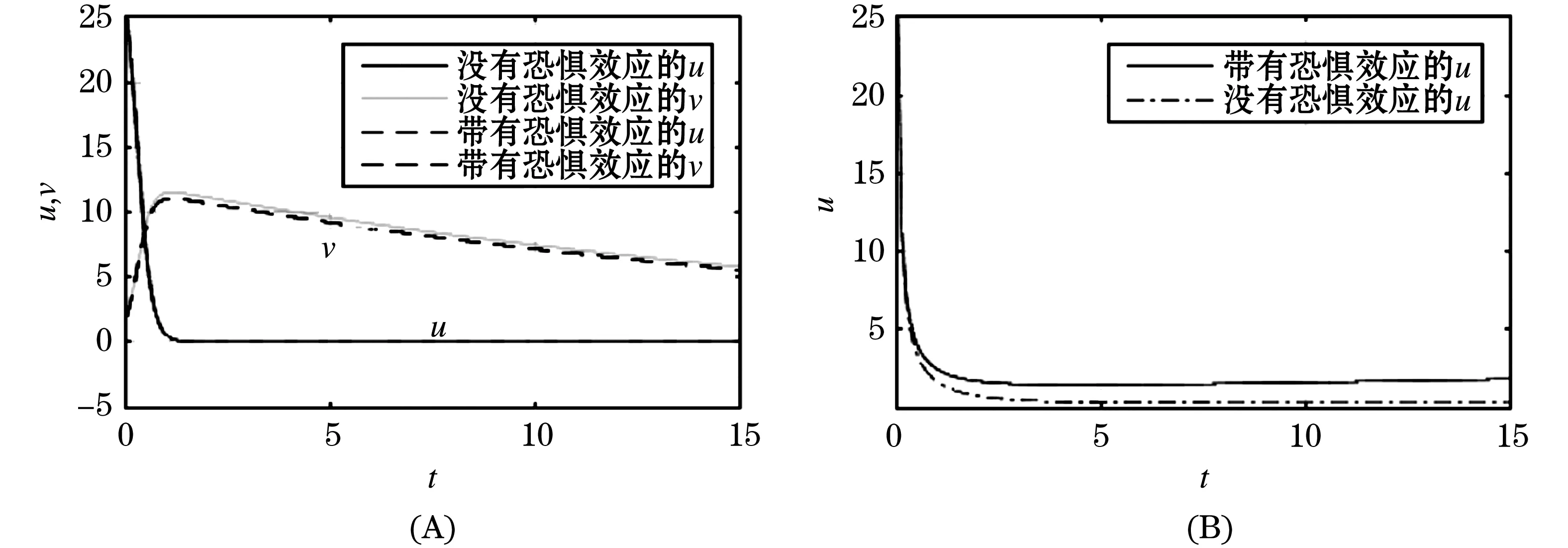
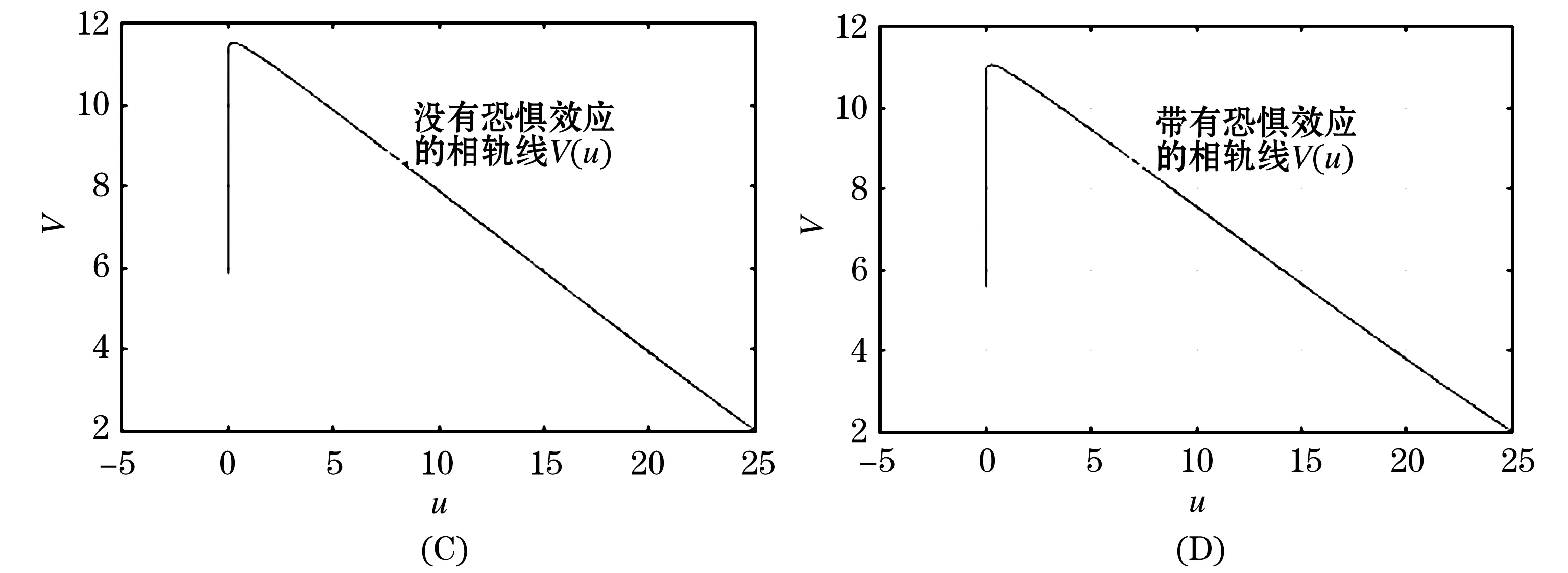
0 0 下面证明v的先验估计,令l=cu+v,联立系统(2)得 -Δl=-cΔu-Δv=cu(r0/(1+kv)-d-au)-mv. 取 (6) 由引理2可得 -Δl(x0)=cu(x0)(r0/(1+kv(x0))-d-au(x0))-mv(x0)>0. 化简可得 v(x0)<[cu(x0)(r0/(1+kv(x0))-d- au(x0))]/m (7) 将式(7)代入(6)可得 cu(x0)+cu(x0)(r0-d)/m< c(r0-d)/a(1+(r0-d)/m). 取参数为k=0.5,d=0.1,a=0.1,p=0.5,c=0.4,m=0.8,对模型(2)进行数值模拟.图1为系统 (2)的数值解曲线u(t)、v(t),图2为画出的相轨线v(u). 图1 解曲线Figure 1 Solution curves 图2 相轨线Figure 2 Phase trajectories 通过对图1(A)的观察,可以发现随着时间的增长,无论食饵和捕食者的初始数量是多少,它们的数量最终都会趋于恒定值,即达到稳定共处.并且带有恐惧效应的捕食者数量v(t)相对也比较少;通过图1(B),我们发现,当带有恐惧效应时,食饵数量u(t)会有所减少,这说明恐惧会对食饵的数量有所影响. 在图2中(C)、(D)分别为不带恐惧效应和带有恐惧效应的相轨线v(u).由于相轨线不封闭,说明此时出现了分歧. 利用特征值问题[18-19],可知系统(5)的第一个式子成立-Δv-cpθv=λv,并记M=-λ1(-cpθ).利用M作为分歧参数给出系统(2)存在正解的充分条件,设w=θ-u,χ=v,可以求出 -Δw=-Δ(θ-u)= (-d-2aθ)w+pθχ+F1(w,χ), -Δχ=-Δv= χ(cpθ-m)+F2(w,χ), F1(w,χ)=aw2+r0θ+p(θ-v)χ- r0(θ-w)/(1+kχ), F2(w,χ)=cpwχ. 显然,在(M;0,0)邻域内,Fi(w,χ)i=1,2连续可微,F1(0,0)=F2(0,0)=0.则(w,χ)满足 (8) 令 很明显T∶R×X1→X是一个连续的紧可微算子.设 G(m;w,χ)=(ω,χ)T-T(m;w,χ), (9) 显然G(m;w,χ)是连续可微的,G(m;w,χ)=0,并且G(m;w,χ)=0的解(w,χ)满足0≤w≤θ,χ≥0,且G(m;w,χ)=0的解(w,χ)是系统(8)的非负解. 定理4 设r0-d>λ1,则(M;0,0)是方程G(m;w,χ)=0的一个分歧点,即在(M;0,0)的邻域内,系统(2)至少存在一个正解. 证明计算G(m;w,χ)在(M;0,0)处的F导数 DG(w,χ)(m;w,χ)= L1(M;0,0), 由引理3知,需验证以下三条: 1)Ker(L1(M;0,0))=span{(w1,χ1)}; 2)codimR(L1(M;0,0))=dimN(L1(m;0,0))=1; 3)L2(M;0,0)(w1,χ1)∉R(L1(M;0,0)). 假设(w,χ)∈Ker(L1(M;0,0))且(w,χ)≢0,则(w,χ)满足L1(M;0,0)(w,χ)T=0,即 (10) 显然若χ≡0则w≡0,故χ≢0.由M定义知χ=χ1>0是-M对应的主特征函数.进而,由系统(10)可以求出w1=(-Δ+2aθ+d-r0)-1(pθ+kr0θ)χ1>0.所以Ker(L1(M;0,0))=span{(w1,χ1)}. 假设w≠0,由于θ是方程(4)的正解,因此有-Δθ+(r0-d-aθ)θ=0,从而λ1(aθ+d-r0)=0,由系统(11)第一个式子得λ1(2aθ+d-r0)≤0,因此有0≥λ1(2aθ+d-r0)>λ1(aθ+d-r0)=0矛盾,所以w≡0.此时的χ满足 已知L2(M;0,0)(w1,χ1)T=D2G(w,χ)(M;w,χ)(w1,χ1)T=(0,Gqχ1)T.在这里,我们利用假设法,假设L2(M;0,0)(w1,χ1)∈R(L1),即L1(M;0,0)(w,χ)T=(0,Gqχ1)T,则有 (12) 系统(12)的第二个方程等价于 (13) 在方程(13)两边同乘χ1,在Ω上积分得 再利用格林公式[20]得 矛盾,从而假设不成立,即L2(M;0,0)(w1,χ1)∉R(L1(M;0,0)). 因此由引理3知,存在充分小的δ>0及C1类曲线(m,φ,ψ)∶(-δ,δ)→R×Z,使得m(0)=M,φ(0)=ψ(0)=0,以及对于∀|s|<δ,有 f(m(s),v(s),χ(s))=(m(s),s(w1+φ(s)),s(χ1+ψ(s)))=0, 故系统(2)的正解存在且正解(u(s),v(s))可写成u(s)=θ-s(w1+φ(s)),v(s)=s(χ1+ψ(s)).

2.3 发自半平凡解(θ,0)处的分歧




 猜你喜欢
农业工程学报(2022年7期)2022-07-09六盘水师范学院学报(2021年6期)2022-01-09逻辑学研究(2021年3期)2021-09-29意林(2021年9期)2021-05-28百科探秘·海底世界(2020年11期)2020-12-31当代陕西(2019年12期)2019-07-12计算机应用与软件(2018年12期)2018-12-13动漫星空(兴趣英语)(2018年4期)2018-10-30读友·少年文学(清雅版)(2018年2期)2018-09-10中外文摘(2016年13期)2016-08-29
猜你喜欢
农业工程学报(2022年7期)2022-07-09六盘水师范学院学报(2021年6期)2022-01-09逻辑学研究(2021年3期)2021-09-29意林(2021年9期)2021-05-28百科探秘·海底世界(2020年11期)2020-12-31当代陕西(2019年12期)2019-07-12计算机应用与软件(2018年12期)2018-12-13动漫星空(兴趣英语)(2018年4期)2018-10-30读友·少年文学(清雅版)(2018年2期)2018-09-10中外文摘(2016年13期)2016-08-29