基于H∞非线性控制器的电动汽车无线充电系统的副边控制设计与参数优化
2022-02-21 07:49赵靖英张振远
电工技术学报 2022年3期
赵靖英 张振远 张 珂
基于∞非线性控制器的电动汽车无线充电系统的副边控制设计与参数优化
赵靖英1,2张振远1,2张 珂1,2
(1. 河北工业大学省部共建电工装备可靠性与智能化国家重点实验室 天津 300130 2. 河北工业大学河北省电磁场与电器可靠性重点实验室 天津 300130)
针对电动汽车动力电池组的变电压间歇充电的快速充电模式,提出一种基于∞非线性控制器的SP型磁耦合谐振式无线电能传输(MCR-WPT)系统副边控制方法。该方法首先基于SP型MCR-WPT系统的数学模型分析其拓扑输出电压特性,确定副边控制策略,并针对副边DC-DC变换器设计∞非线性控制器;然后利用多目标多约束算法(NSGA-Ⅱ)对实现变电压间歇充电的控制器参数进行自动寻优,有效提高了闭环系统的上升时间、稳态误差及对参数扰动的鲁棒性;之后,对Buck变换器进行抗干扰仿真和系统变电压间歇充电特性仿真,仿真结果证明系统能够实现变电压间歇充电,并具有强鲁棒性和良好的动态响应;最后,设计系统的输出特性实验,实验结果证明该文提出的∞非线性控制器及其参数优化的有效性。
变电压间歇充电 无线电能传输∞非线性控制器 参数优化
0 引言
磁耦合谐振式无线电能传输(Magnetically-Coupled Resonant Wireless Power Transfer, MCR-WPT)因其具有传输方式脱离实际物理连接、供电灵活、可靠性高、无电火花产生的特点[1],已应用在AGV(automated guided vehicle)小车、电动汽车、机器人等领域[2-3]。其供电方案一般为无线充电装置先给设备自备储能电池充电,再由电池为设备提供电能。
MCR-WPT系统的基本补偿网络可以分为串联-串联(Series-Series, SS)、串联-并联(Series-Parallel, SP)、并联-串联(Parallel-Series, PS)、并联-并联(Parallel-Parallel, PP)四种[4]。其中,相对于PS型和PP型拓扑结构,SS型和SP型结构简单、参数设计容易;相对于SS型拓扑结构,SP型适合于原、副边相对静止和负载变化较大的系统,且可在较远传输距离下获得较高功率与效率。除了四种基本补偿结构外,LCL、LCC等复合型高阶拓扑结构也受到了广泛的关注[5-6]。本文选择结构简单的SP型补偿网络作为控制设计的基础。
针对电动汽车动力电池组的充电过程[7],恒压和恒流充电方式不适于单独使用,应用最为广泛的阶段式充电方式的充电电流曲线接近马斯曲线的程度不足,不利于电池的快速充电;间歇式充电方式的充电电流最接近马斯曲线,蓄电池析气量小,从工程角度来看,变电压控制比变电流控制更易实现,变电压间歇充电方式的充电电压和电流曲线如图1所示。
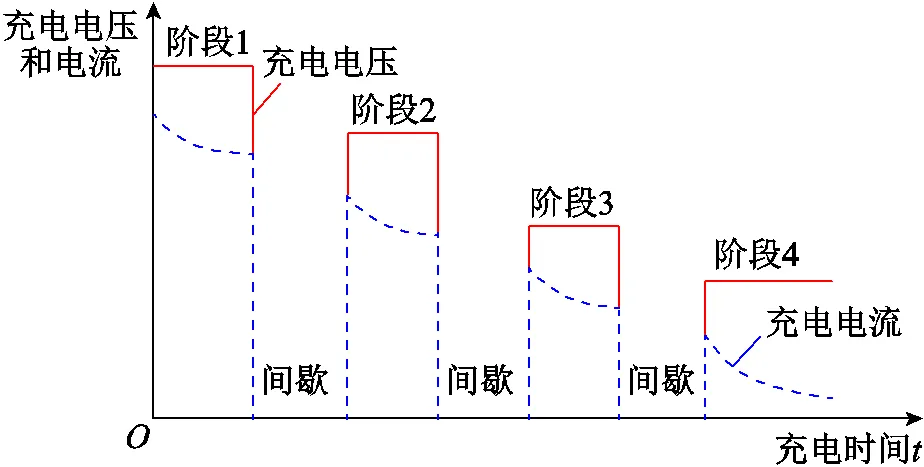
图1 变电压间歇充电方式的充电电压和电流曲线
针对电动汽车静态无线充电系统,系统能量传输的鲁棒性控制方法可分为原边控制、副边控制和双边控制[8]。控制的实现方法一般又可分为基于DC-DC变换器的控制、基于高频逆变器或有源整流桥的变频控制或移相控制等[6]。基于DC-DC变换器的控制简单可靠、适应性强,成为国内外学者研究的一大热点。文献[9]针对副边的有源整流桥和DC-DC变换器设计了基于极点配置法的PI控制器,但只在“整流模式”下才能实现最大效率跟踪,系统的平均效率仅达到67.28%,而且基于传递函数的PI控制器不适用于强非线性的WPT系统中。文献[10]在原、副边均加入了DC-DC变换器,通过原边控制来调节输入电压以维持副边输出电压恒定,通过副边控制改变等效电阻实现最大效率阻抗匹配,但是由于需要双边的无线通信,系统成本高。文献[11]基于原边DC-DC变换器对原边线圈电流进行控制,实现了系统最大频率跟踪以及恒定的输出电压,但仍需双边无线通信。在提高系统的动态响应方面,文献[12]提出副边采用离散滑模控制器对DC-DC变换器控制的方法,实现了稳压控制,其动态响应速度相对PI控制器有所提升,但未给出具体的控制器参数优化方法。
本文建立了副边加入DC-DC变换器的SP型MCR-WPT系统数学模型;并针对MCR-WPT系统的强非线性、对系统参数变化敏感、电动汽车动力电池存在不同充电电压等级等问题,设计副边∞非线性控制器;利用带精英策略的非支配排序遗传算法(Non-Dominated Sorted Genetic Algorithm-Ⅱ,NSGA-Ⅱ)自动搜寻变电压间歇充电的控制器参数,完成参数优化,实现系统的变电压间歇充电,保证系统输出响应快、稳态误差小,并能有效跟踪期望值。该控制方法简单可靠,减小了系统的制造成本和设备体积,避免了双边的无线通信。
1 SP型MCR-WPT系统的拓扑结构建模与特性分析


图2 SP型MCR-WPT系统结构
发射线圈与接收线圈的松耦合程度用耦合系数表示为

SP型谐振拓扑电路的输出电压为

式中,eq为副边侧整流部分及后面部分的等效电阻,即

式中,为副边侧Buck变换器功率开关管的占空比。
在对系统副边进行控制时,对Buck变换器进行控制。为了直观地表示Buck变换器的开关管占空比、线圈耦合系数与SP型谐振拓扑电路输出电压的关系,利用Matlab软件作具体分析,系统拓扑结构参数见表1,负载为20 Ω,并根据SAE—J2954 标准设定工作频率为85kHz。
表1 系统谐振结构参数

Tab.1 System resonance structure parameters
在其他系统参数不变的情况下,只改变耦合系数和占空比,获得拓扑输出电压有效值与线圈耦合系数和占空比的关系如图3所示。
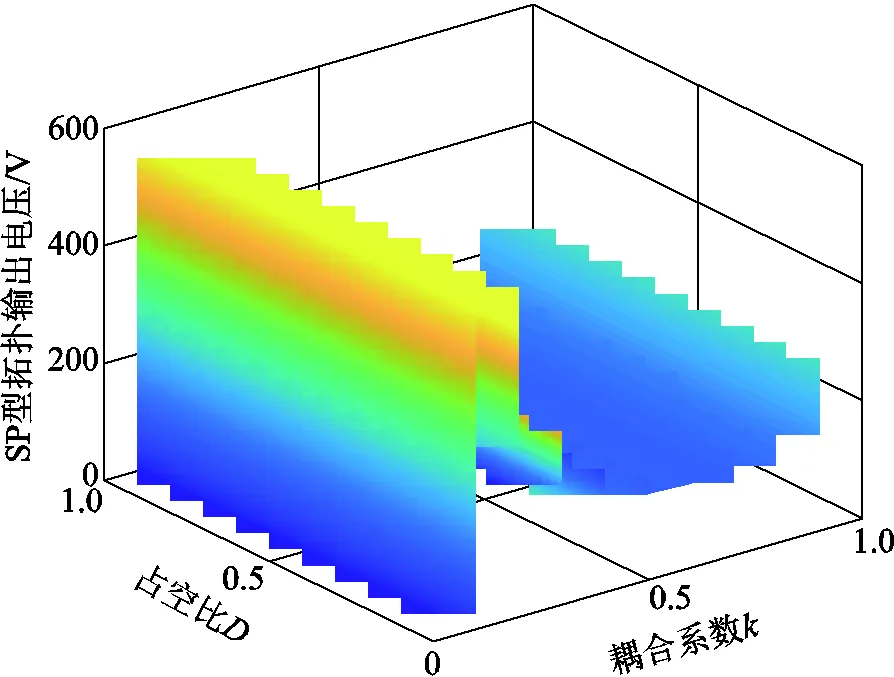
图3 SP型拓扑输出电压有效值与线圈耦合系数和Buck电路占空比的关系
由图3可知,当保持Buck变换器占空比不变时,改变线圈耦合系数,SP型拓扑输出电压有效值随着耦合系数的增大先增大后减小再增大,且在耦合系数为0.2时,输出电压最大,达到543 V,因此线圈耦合系数的改变会引起Buck变换器输入电压的改变。当保持线圈耦合系数不变时,改变Buck变换器的占空比,SP型拓扑输出电压也保持不变,这说明当通过改变Buck变换器的占空比来抑制由负载改变引起的负载电压波动时,不会对无线充电系统中整流环节之前的电路造成不利影响。
更深入地分析,当调整Buck变换器的占空比为0时,可实现系统负载电压接近于0V,即实现充电状态的间歇状态,而且此时可继续保持无线充电系统的正常运行,这从理论上验证了对动力电池采用变电压间歇充电方式的可行性。
2 SP型MCR-WPT系统副边H∞非线性控制设计
考虑到基于DC-DC变换器的控制简单可靠、适应性强的优点,本文采用副边控制,但需要考虑以下影响因素:在变电压间歇充电方式的每个分段恒压过程中,随着充电的进行,电池的极化电阻在不断增大,可以近似等效为充电过程中负载电阻在波动;为实现分段恒压,需要保证每一个分段过程中在蓄电池极化电阻变化的情况下充电电压输出稳定。
改变Buck变换器占空比不会影响无线充电系统中整流环节之前的电路特性,在其他条件不变的情况下,将SP型MCR-WPT系统整流环节及其之前的部分等效为直流源,此时无线充电系统可看作一个Buck变换器。设计非线性∞控制器实现参数扰动下对系统的稳定控制,其控制原理如图4所示。其中ref为MCR-WPT系统的参考充电电压,ref为MCR-WPT系统的参考充电电流,o为MCR-WPT系统的输出充电电压。

图4 Buck变换器的非线性H∞控制器控制原理
根据Buck变换器的拓扑结构,在时域上对拓扑建模为

式中,=0代表MOSFET管断开;=1代表MOSFET管导通。
MCR-WPT系统副边的DC-DC变换器开关管工作频率设定为100 kHz,根据状态空间平均法的思想,在开关周期内,状态量电感电流i、电容电压u可看作恒值。
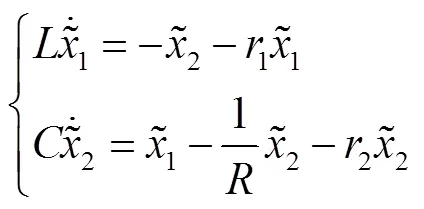
将式(4)改写成通用状态方程,即



式中,1和2为可调的阻尼系数,即SP型MCR-WPT系统副边控制器的动态响应控制系数。
为使Buck变换器成为一个无源系统,将式(5)与式(6)相减,有

根据∞控制的非线性控制理论,∞控制器的控制目标可以转化为:当系统不存在干扰时,控制器保证系统内部稳定;当系统存在干扰时,控制器尽量降低干扰对输出响应造成的影响,即使系统的2增益尽可能小[13]。
根据耗散性与2性能准则[13],系统若存在某一能量储存函数使得式(9)的耗散不等式成立,则称该系统是-耗散的,此时系统具有小于或等于的2增益。

式中,为给定正数,表示系统的干扰抑制能力;为系统的输出。
根据无源控制理论[13],考虑SP型MCR-WPT系统的Buck变换器电路中电容和电感元件的储能性质,构造Lyapunov函数的能量存储函数的标量形式为


将式(8)代入式(11),得到

根据La Salle-Yoshizawa定理给出的稳定性条件,选择合适的1和2,使得耗散不等式成立。此时1和2应该满足
当阻尼系数1和2确定后,由式(6)可得到图4中Buck变换器的反馈控制器为


因此,将设计的控制器应用于SP型MCR-WPT系统的副边控制时,可实现对动力电池组进行变电压间歇充电,从而使系统输出不高于SP型拓扑输出电压的任意电压等级的充电电压。因此,设计的控制器在理论上可以实现SP型MCR-WPT系统对动力电池组的变电压间歇充电方式。
3 基于NSGA-Ⅱ算法的SP型MCR-WPT系统的H∞非线性控制器的参数优化
本文针对SP型MCR-WPT系统副边侧Buck变换器设计了∞非线性控制器。选取解决多目标、多约束问题非常有效的NSGA-Ⅱ算法[14]对阻尼系数1和2进行全局寻优,使系统在优化阻尼系数的作用下,当系统存在输入电压或负载扰动时仍能输出预设电压,且具有较高的动态响应(调整时间短、稳态误差小、超调量小)。NSGA-Ⅱ算法的具体流程如图5所示。

图5 NSGA-Ⅱ算法的流程
3.1 优化目标、约束条件及适应度函数
3.1.1 优化目标
采用变电压间歇充电方式对动力电池组进行充电时,每个恒压阶段电压设定值不同,但提高动态响应的优化目标函数一致。为提高∞非线性控制器的动态响应,设计三个以阻尼系数1和2为变量的目标函数作为算法的性能评价指标。
1)峰值时间函数

式中,p为峰值时间,定义为SP型MCR-WPT系统输出充电电压超过稳态值达到的第一个峰值所需要的时间。目标函数1可体现控制器动态响应的快速性。
2)超调量函数


3)时间乘以误差二次积分函数

式中,()为时刻SP型MCR-WPT系统输出充电电压值与稳态值的误差的二次方。目标函数3可综合体现控制器动态响应的稳态误差和调整时间。
由于SP型MCR-WPT系统的强非线性和动态响应的实时性,本文采用预处理方法进行实现:首先借助Matlab/Simulink软件,对基于∞非线性控制器的SP型MCR-WPT系统进行大量仿真,通过输入不同的阻尼系数1和2(范围为4 ~ 16),得到系统动态响应数据库;然后选取最佳拟合函数,拟合得到3个优化目标与阻尼系数的函数关系。
3.1.2 约束条件
处在非支配前沿边界的某些阻尼系数1和2可能导致系统动态响应的超调量很小,而达到稳态充电电压的时间很长。为了解决这一问题,算法需要对非支配最优解的目标函数值作约束处理,即对SP型MCR-WPT系统动态响应的3个优化目标函数以及非线性∞控制器阻尼系数1和2的取值范围设置约束条件。
本文根据SP型MCR-WPT系统大量的仿真数据(包括输出充电电压的峰值时间、超调量、稳态误差和调整时间)及经验条件给出五个约束条件,即

式中,Cons1、Cons2和Cons3分别为对基于∞非线性控制策略的SP型MCR-WPT系统的3个目标函数的边界约束;Cons4和Cons5分别为对∞非线性控制器的阻尼系数1和2的取值范围的约束。
3.1.3 适应度函数
为获得三个目标函数1、2和3的非支配最优解,将有约束最优化问题转化为求解无约束最优化问题,并提高其收敛速度、获得更加均匀的阻尼系数1和2的Pareto前沿,本文以多目标指数罚函数作为NSGA-Ⅱ算法的适应度函数,即
3.2 优化结果
借助Matlab软件,应用带约束条件的NSGA-Ⅱ算法,对SP型MCR-WPT系统副边Buck变换器∞非线性控制器的阻尼系数进行参数寻优,遗传算法的参数设置为:种群大小为100,遗传代数为30,交叉概率为0.9,变异概率为0.1。以图1所示的变电压间歇充电方式的阶段1为例,电压设定值为250 V,SP型MCR-WPT系统的目标函数获取时的仿真模型拓扑参数见表1,系统规格见表2。
表2 MCR-WPT系统规格

Tab.2 MCR-WPT system specifications
图6为当遗传代数为30时,100个种群个体的目标分布情况。由图6可看出,当种群遗传到30代时,其非支配最优解均匀分布在最优解集中,种群中每组阻尼系数1和2的三个目标值均达到较小值,控制其取得较好的动态响应性能。选择等级为1,拥挤度较大的一个非支配最优解作为最终选定的最优解opt。其对应的目标函数值分别为:峰值时间0.58ms,超调量为3.2%,时间乘二次方误差积分为0.016,此时相应的∞非线性控制器的阻尼系数1和2分别为4.1和12.9。

图6 NSGA-Ⅱ算法的优化结果
4 仿真分析与实验设计
本文进行了仿真与实验,以验证基于∞非线性控制器的SP型MCR-WPT系统能够抑制负载扰动,并且能够实现变电压间歇充电方式。
4.1 仿真分析
SP型谐振拓扑结构参数见表1,系统的设计规格见表2。根据SAE J295,设定系统固有谐振频率为85 kHz。
在实际充电过程中,动力电池组的内阻不断增大,本文采用突变负载来模拟动力电池组的充电过程。基于NSGA-Ⅱ算法对变电压间歇充电方式各恒压阶段的阻尼系数优化结果见表3,将其代入∞非线性控制器进行仿真分析和实验验证。
表3 阻尼系数优化结果
具体过程如下:在∞控制器中预设变电压间歇式充电方式各阶段充电电压值和控制器的阻尼系数。经过鲁棒性控制后,控制器输出变量与三角波信号进行比较,得到控制开关S的 PWM信号,最终通过调节其占空比,实现动力电池组变电压间歇充电。
进行的仿真分析包括两部分:①基于∞非线性控制器Buck变换器抗干扰仿真:验证基于∞非线性控制器Buck变换器对负载扰动和输入电压扰动的鲁棒性及其动态响应效果;②基于∞非线性控制器SP型MCR-WPT系统输出特性仿真:验证基于∞非线性控制器系统能够实现变电压间歇充电。
对于仿真①,Buck变换器元件参数为:=400μH,=40μF,L=20Ω,=300V,开关频率为100kHz,阻尼系数1=4.9,2=14.2,期望输出电压100V,仿真结果如图7所示。
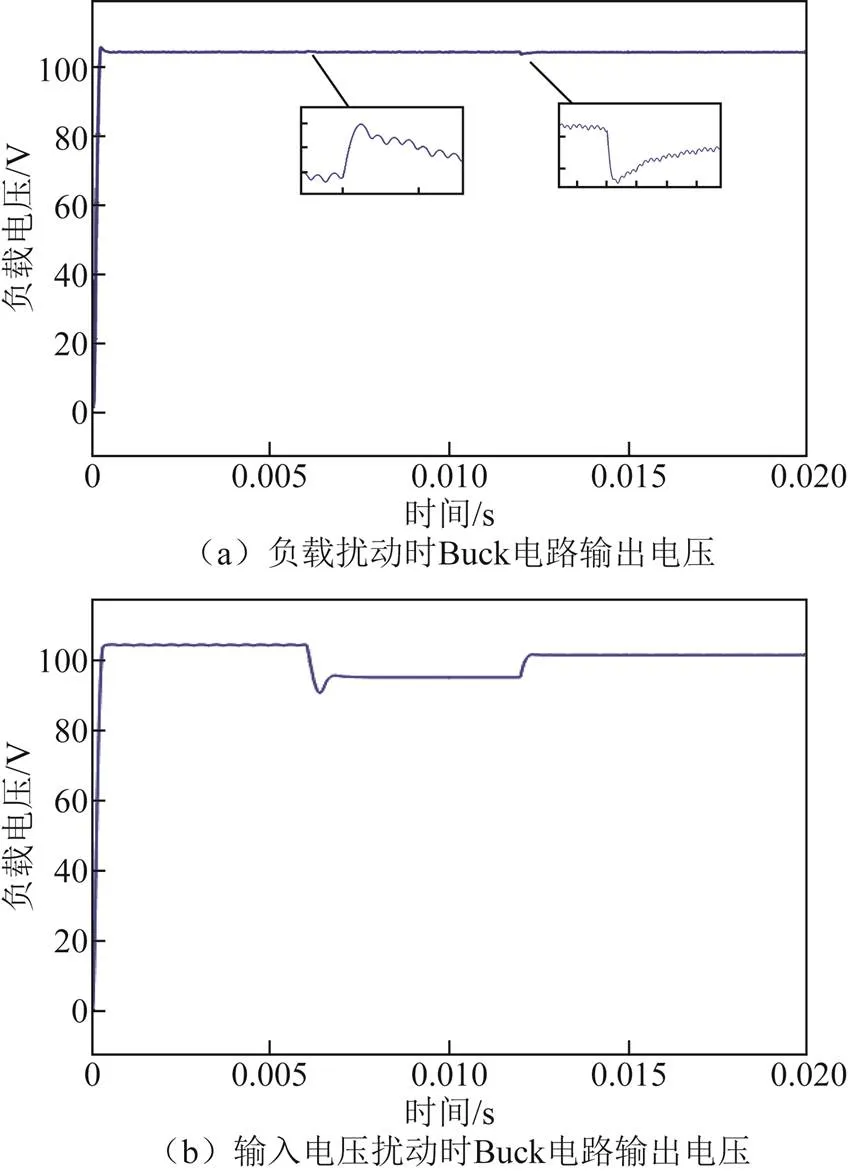
图7 扰动时Buck电路输出电压
图7a显示了负载电阻L变化时,Buck变换器输出电压响应。=0.006s时,L由20Ω突增为30Ω,=0.012s时,L由30 Ω突减为10Ω,负载变化幅度为+50%和-66.67%。系统输出经0.3ms的暂态调整稳定在104 V,稳态误差偏移率为4%,且当负载突变时,系统仍能稳定输出期望电压。
图7b显示了输入电压变化时,Buck变换器输出电压响应。=0.006s时,输入电压由300V突降为100V,=0.012s时,输入电压由100V突增为200V,输入电压变化幅度为-66.67%和+100%。系统输出经0.7ms的暂态调整稳定在104 V,稳态误差偏移率为4%;=0.006s时,系统输出电压为96V,稳态误差偏移率为-4%;在=0.012s时,系统输出电压为102V,稳态误差偏移率为2%。
总之,图7中的仿真结果显示基于∞非线性控制器的Buck变换器对负载扰动和输入电压扰动具有强鲁棒性,且其动态响应迅速。
对于仿真②,变电压间歇充电的电压设定如图8所示。

图8 仿真中变电压间歇充电方式的电压设定
本文采用宽范围负载切换来模拟电池充电过程变化的非线性内阻,负载的切换设定见表4。
表4 仿真中负载的切换设定

Tab.4 Load switching setting in simulation
基于∞非线性控制器SP型MCR-WPT系统采取变电压间歇充电方式的仿真结果如图9所示。

图9 变电压间歇充电输出电压和电流
由图9可知,在0~0.02s时间内,输出电压经过3ms的调整稳定在251.8V,稳态误差偏移率为0.72%,而且在0.01s,负载由25Ω突变至27.78Ω,输出电压保持恒定,输出电流由10.05A降至9.05A;在0.02~0.04s时间内,输出电压和输出电流经过约8ms的调整分别降至5.1V和0.13A,而且在0.03s,负载由27.78Ω突变至31.25Ω,输出电压和输出电流保持恒定;在0.04~0.06s时间内,输出电压经过1ms的调整稳定在202.5V,稳态误差偏移率为1.25%,在0.05s,负载由31.25Ω突变至35.71Ω,输出电压保持恒定,输出电流由6.48A降至5.67A;在0.06~0.08s时间内,输出电压和输出电流经过约8ms的调整分别降至5.1V和0.1A,在0.07s,负载由35.71Ω突变至41.67Ω,输出电压和输出电流保持恒定;在0.08~0.1s时间内,输出电压经过1ms的调整稳定在153.4V,稳态误差偏移率为2.27%,而且在0.09s,负载由41.67Ω突变至50Ω,输出电压保持恒定,输出电流由4.09A降至3.07A;在0.1~0.12s时间内,输出电压和输出电流经过约10ms的调整分别降至5.1V和0.09A,在0.11s,负载由50Ω突变至62.5Ω,输出电压和输出电流保持恒定;在0.12~0.14s时间内,输出电压经过0.3ms的调整稳定在104V,稳态误差偏移率为4%,而且在0.13s,负载由62.5Ω突变至83.33Ω,输出电压保持恒定,输出电流由1.67A降至1.25A。从总体时间段内的输出电压来看,∞控制的SP型MCR-WPT系统实现了变电压间歇充电方式,对负载扰动的鲁棒性非常强,而且动态响应速度非常快。
4.2 实验设计
基于∞非线性控制器的SP型MCR-WPT系统的实验平台如图10所示。该实验平台主要分为五部分:能量发射部分、磁耦合结构、能量接收部分、测量部分及负载部分。
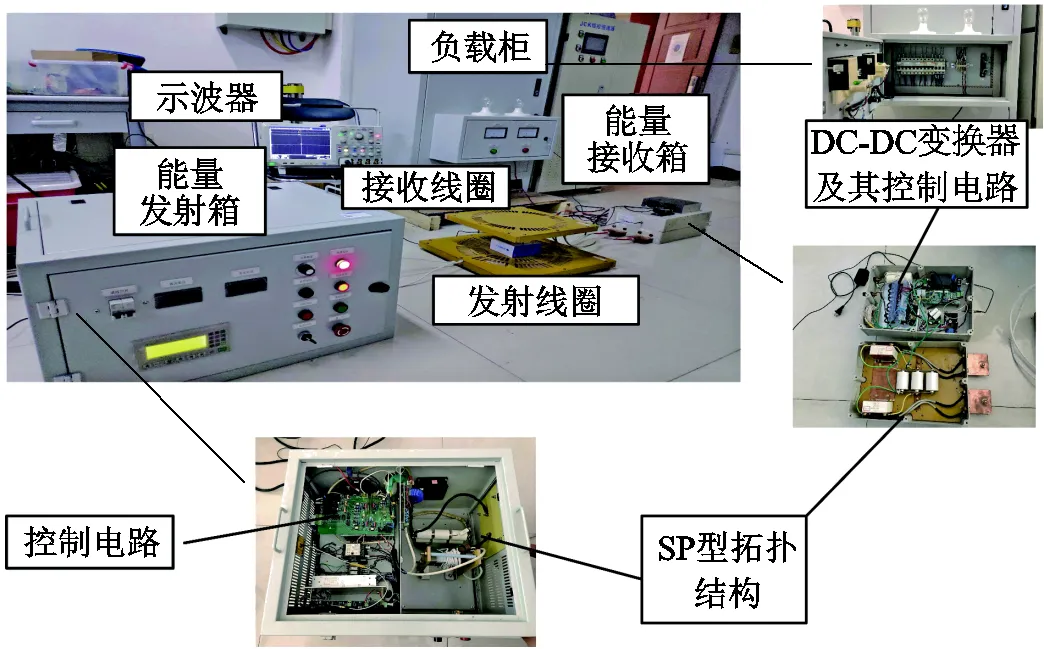
图10 基于H∞非线性控制器的SP型MCR-WPT系统的实验平台
本文的实验设计为基于∞非线性控制器的SP型MCR-WPT系统输出特性实验,用来验证控制设计能够实现变电压间歇充电。实验参数见表1和表5,根据标准SAE—J2954,设定系统固有谐振频率为85kHz。采用数字示波器(DPO 5034B)来测量无线充电系统的输出电压和电流。
表5 MCR-WPT系统参数设计

Tab.5 MCR-WPT system parameters design
通过不同充电阶段电压预设值,借助Matlab软件仿真得到4个充电阶段和间歇状态中阻尼系数1和2的优化结果,将优化后的1和2输入dsPIC30F6011A控制芯片,实现对不同充电阶段的参数整定。实验参数整定值见表6。
表6 实验参数整定值

Tab.6 Parameter setting value in experiment
在动力电池的充电过程中,其内阻不断增大,本文利用电阻负载柜,按照时间切换其阻值来模拟动力电池的充电过程,充电阶段1~4以及间歇阶段各设置两种负载切换,负载电阻的切换设定见表7。
表7 实验中负载的切换设定

Tab.7 Load resistance setting in experiment
变电压间歇充电实验过程中部分时刻的输出电压和输出电流波形如图11所示。

图11 实验中部分时刻输出电压和输出电流波形
当充电时间为5min时,输出充电电压为252.3V,输出充电电流为9.2A,系统工作在充电阶段1;当充电时间为15min时,输出充电电压为5.5V,输出充电电流为0.2 A,系统工作在间歇阶段;当充电时间为25min时,输出充电电压为204.2V,输出充电电流为5.9 A,系统工作在充电阶段2;当充电时间为45min时,输出充电电压为154.8V,输出充电电流为3.5A,系统工作在充电阶段3;当充电时间为65min时,输出充电电压为106.2V,输出充电电流为1.7A,系统工作在充电阶段4。
将基于非线性∞控制器的SP型MCR-WPT系统的实验和仿真数据及误差分析汇总成表8和表9。
表8 SP型MCR-WPT系统变电压间歇充电输出结果

Tab.8 SP MCR-WPT system output with variable voltage intermittent charging model
表9 系统变电压间歇充电的电压误差分析

Tab.9 Voltage error analysis of system variable voltage intermittent charging
表8中实验和仿真数据表明,基于∞非线性控制器的SP型MCR-WPT系统能够实现变电压间歇充电模式。由表9中误差分析可知,实验电压与仿真电压最大误差为1.8%,与预设电压最大误差为6.2%。
为了更加清晰地反映系统的变电压间歇充电方式,将各负载下的充电电流绘制为散点图,如图12所示。由于变电压间歇充电阶段中间歇阶段的充电电流小于0.2 A,不足以对其逼近马斯曲线造成影响,因此在图12中忽略了间歇阶段的充电电流数据,图中的虚线代表最佳充电曲线。
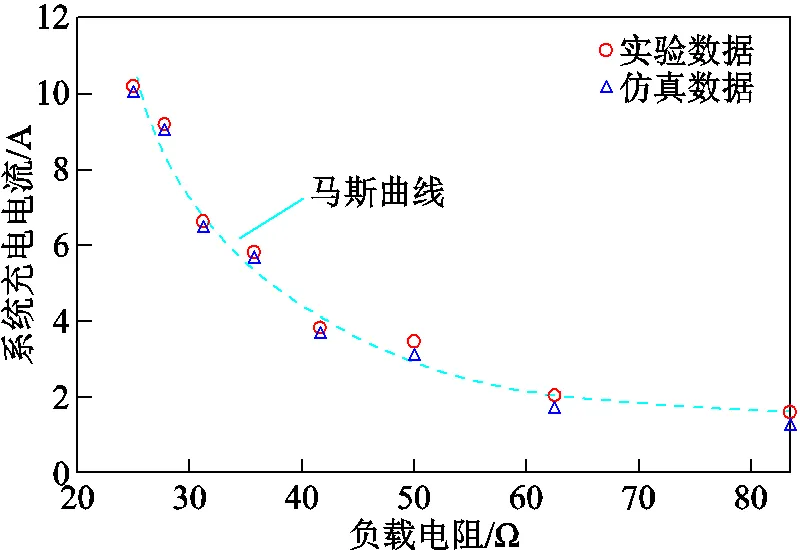
图12 系统变电压间歇充电输出充电电流
由图12可知,采用变电压间歇充电模式,基于∞非线性控制器的SP型MCR-WPT系统的充电电流曲线能非常逼近于马斯曲线,可实现对电动汽车动力电池的快速充电。
由表8和表9以及图12可看出,MCR-WPT系统输出充电电压和输出充电电流的实验结果相对于仿真结果略大,其误差分析如下:
(1)实验中DC-DC变换器元器件制造误差和实验数据测量及读取误差会导致实验结果略微偏离于仿真结果。
(2)实验中利用电阻负载柜(25~250Ω)构成宽范围负载,各个实验电阻由多个250Ω负载电阻并联组合而成,会导致实验负载的实际阻值与仿真负载的阻值略有不同。
(3)在仿真过程中,电路损耗和电阻等元器件的温度漂移影响等没有考虑在内,因此仿真结果的稳态误差优于实验结果。
(4)由于设计的∞非线性控制器的优化算法和实现过程非理想化,稳压效果和控制精度略低于仿真结果。因此实际输出充电电压和输出充电电流略大于仿真结果。
5 结论
本文采用∞非线性控制器对SP型MCR-WPT系统进行输出控制,实现电动汽车动力电池组的变电压间歇充电。利用等效电路建立了副边加入Buck变换器的SP型MCR-WPT系统数学模型,理论分析了拓扑输出电压特性,验证了通过控制Buck变换器占空比对动力电池实现变电压间歇充电方式的可行性。在此基础上,确定了副边控制策略,设计了∞非线性控制器,利用NSGA-Ⅱ算法给出了实现变电压间歇充电的控制器参数优化结果。利用Matlab/Simulink平台建立仿真模型,进行了基于∞非线性控制器的Buck变换器抗干扰仿真和系统的变电压间歇充电仿真,并进行了仿真结果分析。基于理论分析和仿真结果搭建了系统实验平台,设计了系统的输出特性实验,给出实验结果。仿真和实验结果表明基于∞非线性控制器的SP型MCR-WPT系统能够实现变电压间歇充电,使得系统充电电流曲线逼近马斯曲线,从而实现电动汽车锂电池的快速充电,且控制系统具有强鲁棒性,动态响应速度迅速,充电阶段的最大稳态电压偏移率为6.2%,动态响应时间可控制在0.3 ms之内。
[1] 薛明, 杨庆新,章鹏程, 等. 无线电能传输技术应用研究现状与关键问题[J]. 电工技术学报, 2021, 36(8): 1547-1568.
Xue Ming, Yang Qingxin, Zhang Pengcheng, et al. Application status and key issues of wireless power transmission technology[J]. Transactions of China Electrotechnical Society, 2021, 36(8): 1547-1568.
[2] 范兴明, 高琳琳, 莫小勇, 等. 无线电能传输技术的研究现状与应用综述(英文)[J]. 电工技术学报, 2019, 34(7): 1353-1380.
Fan Xingming, Gao Linlin, Mo Xiaoyong, et al. Overview of research status and application of wireless power transmission technology[J]. Transactions of China Electrotechnical Society, 2019, 34(7): 1353-1380.
[3] 吴旭升, 孙盼, 杨深钦, 等. 水下无线电能传输技术及应用研究综述[J]. 电工技术学报, 2019, 34(8): 1559-1568.
Wu Xusheng, Sun Pan, Yang Shenqin, et al. Review on underwater wireless power transfer technology and its application[J]. Transactions of China Electrotechnical Society, 2019, 34(8): 1559-1568.
[4] 焦宇峰, 李锐杰, 宋国兵. 磁耦合谐振式无线电能传输系统特性的研究及优化[J]. 电力系统保护与控制, 2020, 48(9): 112-120.
Jiao Yufeng, Li Ruijie, Song Guobing. Research and optimization of transmission characteristics of magnetically coupled resonant wireless transmission system[J]. Power System Protection and Control, 2020, 48(9): 112-120.
[5] 王佩月, 左志平, 孙跃, 等. 基于双侧LCC的全双工无线电能传输能量信号并行传输系统[J]. 电工技术学报, 2021, 36(23): 4981-4991.
Wang Peiyue, Zuo Zhiping, Sun Yue, et al. Full-duplex simultaneous wireless power and data transfer system based on double-sided LCC topology[J]. Transactions of China Electrotechnical Society, 2021, 36(23): 4981-4991.
[6] 吴理豪, 张波. 电动汽车静态无线充电技术研究综述(下篇)[J]. 电工技术学报, 2020, 38(8): 1662-1678.
Wu Lihao, Zhang Bo. Overview of static wireless charging technology for electric vehicles:part Ⅱ[J]. Transactions of China Electrotechnical Society, 2020, 38(8): 1662-1678.
[7] 陈亚爱, 邱欢, 周京华, 等. 铅酸蓄电池充电控制策略[J]. 电源技术, 2017, 41(4): 654-657.
Chen Yaai, Qiu Huan, Zhou Jinghua, et al. Charging control strategy of lead acid battery[J]. Chinese Journal of Power Sources, 2017, 41(4): 654-657.
[8] Patil D, Mcdonough M K, Miller J M, et al. Wireless power transfer for vehicular applications: overview and challenges[J]. IEEE Transactions on Transportation Electrification, 2018, 4(1): 3-37.
[9] Lovison G, Sato M, Imura T, et al. Secondary-side-only simultaneous power and efficiency control for two converters in wireless power transfer system[C]//IEEE IECON 2015-41st Annual Conference of the IEEE Industrial Electronics Society, Yokohama, 2015: 4824-4829.
[10] Li Hongchang, Li Jie, Wang Kongping, et al. A maximum efficiency point tracking control scheme for wireless power transfer systems using magnetic resonant coupling[J]. IEEE Transactions on Power Electronics, 2015, 30(7): 3998-4008.
[11] Yeo T, Kwon D, Khang S, et al. Design of maximum efficiency tracking control scheme for closed-loop wireless power charging system employing series resonant tank[J]. IEEE Transactions on Power Electronics, 2017, 32(1): 471-478.
[12] Yang Yun, Zhong Wenxing, Kiratipongvoot S, et al. Dynamic improvement of series–series compensated wireless power transfer systems using discrete sliding mode control[J]. IEEE Transactions on Power Electronics, 2018, 33(7): 6351-6360.
[13] 梅生伟, 申铁龙, 刘康志. 现代鲁棒控制理论与应用[M]. 北京: 清华大学出版社, 2008.
[14] 苏玉刚, 陈苓芷, 唐春森, 等. 基于NSGA-Ⅱ算法的ECPT 系统PID 参数寻优及输出稳压控制[J].电工技术学报, 2016, 31(19): 106-114.
Su Yugang, Chen Lingzhi, Tang Chunsen, et al. Evolutionary multi-objective optimization of PID parameters for output voltage regulation in ECPT system based on NSGA-Ⅱ[J]. Transactions of China Electrotechnical Society, 2016, 31(19): 106-114.
Control Design and Parameter Optimization on Secondary Side of Electric Vehicle Wireless Charging System Based on∞Nonlinear Controller
Zhao Jingying1,2Zhang Zhenyuan1,2Zhang Ke1,2
(1.State Key Laboratory of Reliability and Intelligence of Electrical Equipment Hebei University of Technology Tianjin 300130 China 2. Key Laboratory of Electromagnetic Field and Electrical Apparatus Reliability of Hebei Province Hebei University of Technology Tianjin 300130 China)
Aiming at the fast charging mode of variable voltage intermittent charging for power battery packs of electric vehicle, a secondary control method based on∞nonlinear controller for SP magnetic coupling resonance wireless power transfer (MCR-WPT) system was proposed. The output voltage characteristics of SP MCR-WPT system were analyzed based on its mathematical model. The control strategy on the secondary side was determined, and the∞nonlinear controller for DC-DC converter on the secondary side was designed. A multi-objective and multi-constraint algorithm (NSGA-Ⅱ) was used to automatically optimize the controller parameters during variable voltage intermittent charging process. As the results, rise time, steady-state error and robustness of parameter disturbances in the closed-loop system are effectively improved. Then, the anti-jamming simulation of Buck converter and variable voltage intermittent charging characteristics simulation of the system were carried out. The simulation results show that the system can realize variable voltage intermittent charging, and has strong robustness and good dynamic response. Finally, the output characteristic experiment of the system was designed. The experimental results verify the effectiveness of the∞nonlinear controller and its parameter optimization proposed in this paper.
Variable voltage intermittent charging, wireless power transfer,∞nonlinear controller, parameter optimization
10.19595/j.cnki.1000-6753.tces.201591
TM724
国家自然科学基金重点项目(51377044)和河北省自然科学基金项目(E2019202481)资助。
2020-12-02
2021-04-16
赵靖英 女,1974年生,教授,研究方向为电器可靠性及检测技术、无线电能传输。E-mail:zhaojy931@hebut.edu.cn
张振远 男,1994年生,硕士,研究方向为无线电能传输。 E-mail:zzy_1912@163.com(通信作者)
(编辑 郭丽军)
猜你喜欢
大电机技术(2022年3期)2022-08-06
体育科技文献通报(2022年3期)2022-05-23
煤气与热力(2022年4期)2022-05-23
电力勘测设计(2022年3期)2022-04-07
核科学与工程(2021年4期)2022-01-12
昆明医科大学学报(2021年6期)2021-07-31
煤气与热力(2021年4期)2021-06-09
化工设计通讯(2021年2期)2021-03-15
中国新通信(2020年1期)2020-05-25
中华戏曲(2020年1期)2020-02-12