考虑载荷抑制的风电场分布式自动发电控制
2022-02-21 07:48罗智凌
电工技术学报 2022年3期
姚 琦 胡 阳 柳 玉 罗智凌 綦 晓
考虑载荷抑制的风电场分布式自动发电控制
姚 琦1胡 阳2柳 玉3罗智凌2綦 晓1
(1. 暨南大学能源电力研究中心 珠海 519070 2. 华北电力大学控制与计算机工程学院 北京 102206 3. 国家电网华北电力调控分中心 北京 100053)
为了优化风电场进行自动发电控制时风电机组承受的疲劳载荷,提出一种风电机组控制模型并将其应用于风电场控制。建立了一种多入多出的风机控制模型,同时控制转子转速和桨距角。在此基础上提出一种分布式控制框架的风电场控制系统,使得风电机组相互协调,并以改善疲劳特性为目标直接优化所有机组的转子转速和桨距角。仿真结果表明,该文提出的多入多出控制模型可实现对风电机组更加灵活有效的控制,结合风电场分布式控制框架,在完成自动发电控制(AGC)指令的前提下,风电机组疲劳载荷可以明显降低。
自动发电控制 疲劳载荷 风电场 分布式控制
0 引言
随着风电在电网中渗透率的不断提高,其波动性和不可预测性给电力系统运行带来了挑战[1,2]。因此,许多国家的电力系统运营商在电网规范中都要求增加风力发电系统应具有可控性和快速响应能力[3],提供符合要求的自动发电控制(Automatic Generation Control, AGC)[4]。
由于风电场不存在燃料消耗的成本,其运营成本主要来自设备损失等维护成本[5-6],因此可将AGC问题与降低设备的疲劳水平相结合,以减少运行过程中设备损失带来的成本[7]。现有研究提出多种表征风电机组疲劳的表征方式。文献[7-8]通过构建成本函数来表征相关的运行成本。文献[9-10]认为主轴转矩和塔弯矩的标准差可用作风电机组的疲劳评估指标。文献[11]指出,主轴转矩和塔弯矩的标准差确实与机组的疲劳相关,但它们之间并非简单的线性相关。一些研究人员采用了损伤等效载荷(Damage Equivalent Load, DEL)作为疲劳程度评估指标[12]。DEL在工程应用中得到了广泛认可,但是DEL的计算过程复杂,难以用于在线优化过程。
通过机理模型分析可知,风电机组的主轴转矩、塔弯矩及DEL等用于表征疲劳的参数均与机组转子转速和桨距角直接相关,而风电机组AGC的参数也是转速和桨距角。因此在AGC控制过程中完成疲劳载荷抑制的研究思路是合乎物理规律的。针对风电机组的AGC,现有文献中常用的控制方法包括转子转速控制[13-14]、桨距角控制[15]以及两种控制的协调控制[16-17]。为了获得更好的控制效果,文献[18]提出同时激活桨距角和转子转速控制,桨距角控制用于在较大的时间尺度内跟踪参考功率,转子转速用于在较小的时间尺度内精确调整功率。文献[19]提出了一种类似的协调控制策略,认为应进一步使用转子惯性减少桨距角伺服系统的动作,从而降低其疲劳程度。然而,现有文献中,转子转速和桨距角的协调控制涉及多个控制器的协调,并不能通过单一控制器同时进行调整,桨距角需要在转子转速达到设定的阈值后才开始调整[20],牺牲了桨距角调整的自由度。
由于风电场需要控制多个分布式单元机组,AGC过程除了需要考虑风电机组的控制,风电场层面的优化同样重要[21]。在风电场层面,将电网运营商所需的有功功率合理地分配给风电机组是目前研究热点[22-23]。文献[9]对风电机组进行机组疲劳进行建模,然后采用模型预测控制(Model Predictive Control, MPC)实现考虑疲劳优化的机组功率分配。文献[10]直接利用机理模型获得有功功率与疲劳参数的偏导数关系,从而通过求解器获得优化疲劳分布的风电机组功率指令。然而以上文献中,研究人员采用的均为集中式控制方法,计算复杂度较高,且在风电机组层面均只采用了传统的转速和桨距角协调控制方法。文献[24-25]中利用多智能体系统完成了风电场有功功率的分布式调度,机组之间通过相互通信即可完成调度指令的分配。文献[6]提出一种基于分布式信息同步和估计的模型预测控制算法,用于对风电场有功功率和电压同时进行优化。文献[26]在等比例分配的策略下利用分布式的对偶梯度法完成了风电场有功功率的优化控制。然而,与文献[9-10]中存在的问题相似,以上分布式控制算法也是在传统风电机组协调控制模型的基础上完成的,无法实现利用转子转速和桨距角的同时优化控制来改善机组疲劳特性。
针对以上研究现状,本文提出一种可同时调整转子转速和桨距角的风电机组AGC模型。基于改进的机组控制框架,设计了一种基于交替方向乘子法(Alternating Direction Multiplier Method, ADMM)的分布式模型预测控制(Distributed Model Predictive Control, DMPC)框架来完成风电场功率控制,确保场内风电机组相互协调,针对AGC指令跟踪和疲劳载荷抑制的目标完成转子转速和桨距角的同时控制。在疲劳载荷抑制目标方面,本文结合当前研究成果,以降低主轴转矩和塔弯矩的波动性作为在线优化目标,以DEL为算法优化效果的评价指标。仿真实验验证了本文提出的风电机组控制模型的准确性和风电场分布式AGC算法的有效性。
1 风电机组建模
1.1 风电机组非线性模型
风电机组建模是相关控制器设计的基础,对于进一步提高风电机组控制性能和风电场运行水平具有重要意义。风电机组的建模对象主要包括气动系统、传动系统、变桨伺服系统、电气系统和控制系统。除控制系统外,对于其他子系统的建模已有大量文献进行了研究。各个子系统之间的关联如图1所示。本文以NREL5MW风电机组模型为例,得到各个子系统的数学模型。
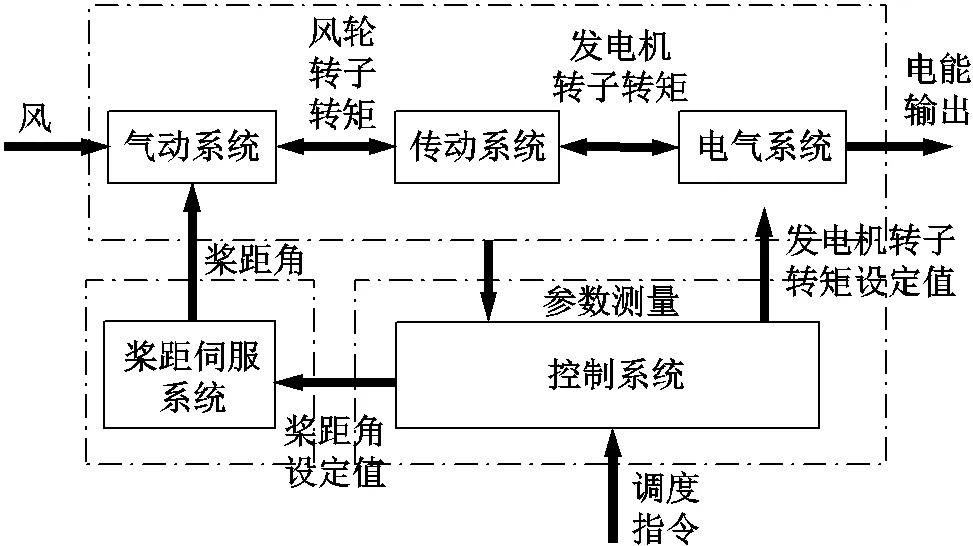
图1 风电机组子系统的相互关联
气动系统



式中,t为风电机组承受的推力(N);t为推力系数。

式中,为塔架高度;t为塔根弯矩(N·m)。
传动系统
电气系统

桨距伺服系统
1.2 风电机组模型线性化
根据1.1节描述的数学模型,由于风电机组中存在高度的非线性特性,难以用于适合线性模型的先进控制算法。因此,本文通过小信号法[27]对上述模型进行线性化处理,得到线性化描述的风电机组模型。
气动系统

传动系统
电气系统
桨距伺服系统


式中,下标为0代表线性化模型的初始工况点。

值得注意的是,根据式(4)和式(5),p具有高度非线性特性。为了进行线性化,本文根据p--曲线查表计算p的偏导数。假设工作点的p值为p0,则通过查表法可获得其周围的插值点,如图2所示。
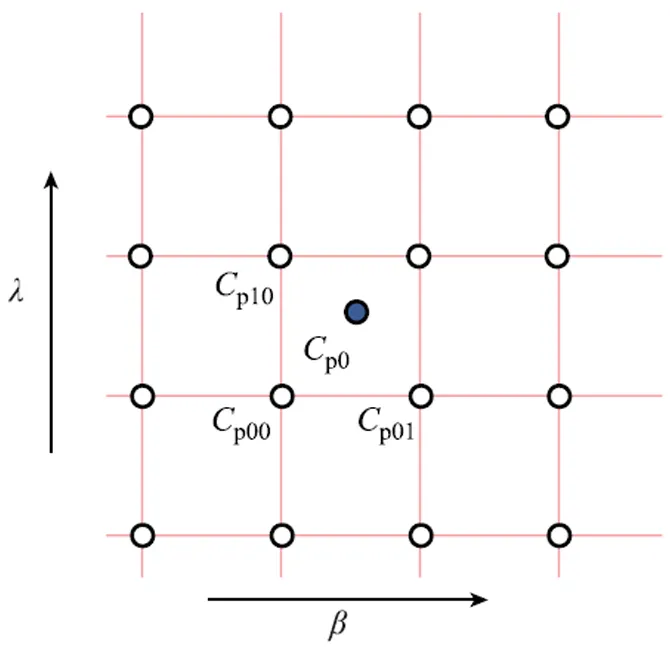
图2 Cp的局部插值示意图
同理可得到t的相关偏导数的表达式为
2 风电机组多入多出AGC控制模型
风轮机从风能中捕获得到的机械功率可以由式(1)模型进行表示。根据该模型,若风电机组需要运行于AGC状态,仅需调整p使其偏离最优值即可。根据风电机组工作原理,p的取值与和相关,且相同的p值可以对应于不同的和组合。
以常见的超速+变桨协调控制为例,当风电机组需要降功率时,该策略首先通过使转子转速超速来降低p。当转子转速增加到上限时,则通过增加桨距角进一步降低p。传统AGC策略示意图如图3所示,所述过程如图3中的箭头所示。

图3 传统AGC策略示意图
研究人员认为,主轴转矩s和塔根弯矩t的波动可用于计算风电机组的疲劳载荷,降低风电机组运行过程中s和t的标准差可降低机组疲劳。根据式(6)和式(8)可知,s、t与转子转速、桨距角的波动有直接关系。在如图3所示的变速变桨控制中,桨距角的变化是在转子转速之后的,受到转子转速设定值的控制,因此在实现有功功率控制时不能使两个参数同时自由调整,即难以进一步考虑对风电机组疲劳载荷的优化。
基于此,本文提出了一种AGC优化控制框架。在以上描述的有功功率优化控制框架下,可以将式(11)~式(26)所描述的线性化模型写成状态空间方程,即
其中
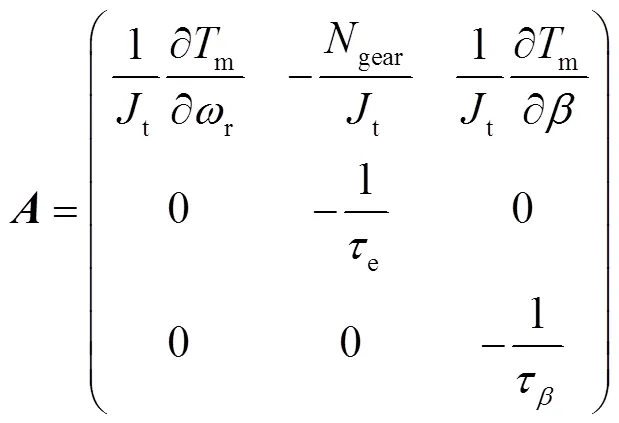
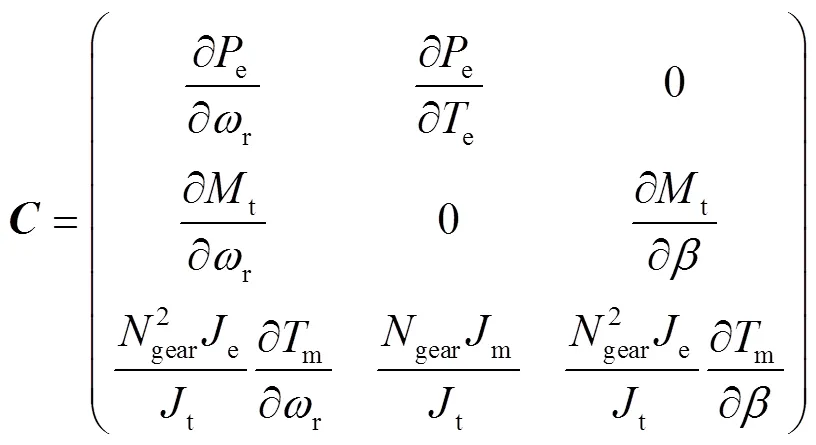
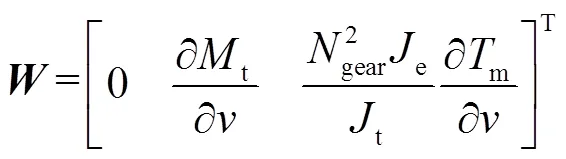
在式(27)所示模型中,风电机组有功控制系统的控制输入为电磁转矩和桨距角的变化量,输出为有功功率、塔弯矩和主轴转矩的变化量。基于上述模型,通过设计优化控制器,可以让控制器同时生成电磁转矩和桨距角的参考值,实现调度指令功率跟踪,减少风电机组运行疲劳载荷。
3 风电场分布式AGC控制框架与求解算法
3.1 风电场分布式控制框架
风电场的AGC信号通常由风电场控制中心计算并分配给场内每台风电机组。在这样的分配过程中,难以根据风电机组的实际运行状态和风况实施闭环控制。本文提出一种基于ADMM算法的DMPC框架进行风电机组参考功率的分配,由风电机组的本地控制器和风电场的控制中心协调实现,如图4所示。该框架可以在完成风电场水平所需的功率的前提下,通过对每台风电机组的优化控制进一步降低风电机组的疲劳载荷。
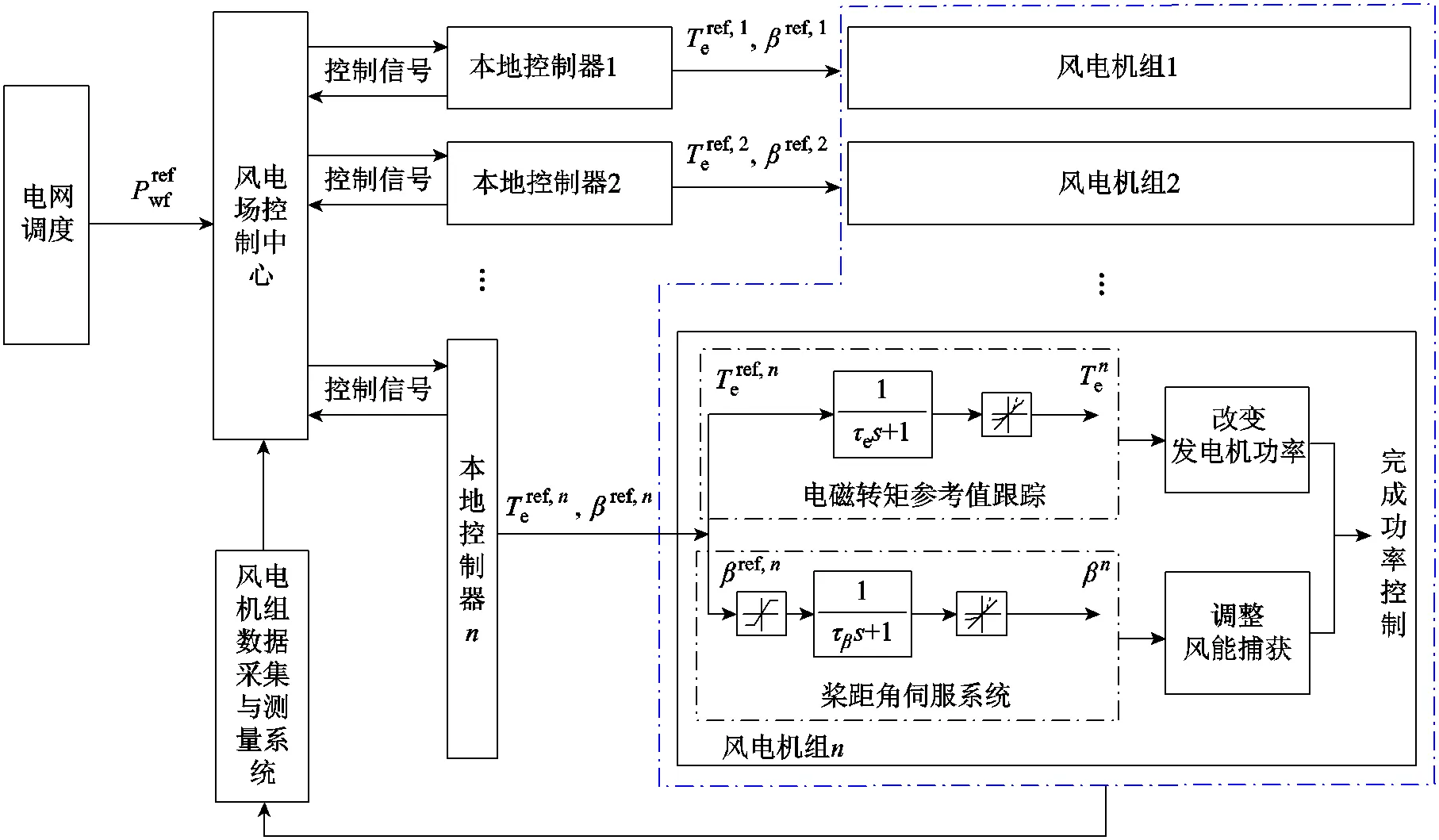
图4 风电场分布式控制框架
在如图4所示的风电场分布式AGC控制框架中,风电场控制中心在获得调度中心下达的AGC控制指令后,与风电机组的本地控制器进行双向的信息通信,完成3.3节中算法所需的参数迭代计算。通过中心控制器和本地控制器的协调计算,每台风电机组均可获得本机的电磁转矩与桨距角设定值,通过本机执行机构中完成有功功率的跟踪。同时,每台风电机组均通过实时测量元件获得包括机舱风速、转子转速以及桨距角等机组运行参数,反馈给机组的本地控制器,从而形成闭环控制。
值得注意的是,尾流效应和湍流强度作为影响风电场运行特性的重要因素,在风电场优化运行过程中必须考虑。更进一步地,在风电场AGC的过程中还需要考虑由于功率调整而产生的动态尾流。本文所建风电场模型在仿真中借助丹麦奥尔堡大学开发的Simwindfarm工具箱,在风电场优化中均考虑了基于Larsen模型的尾流计算和基于IEC 61400-3所规定的湍流模型,此处不再对相关模型进行详细描述[28]。
在以上所述尾流及湍流模型的基础上,对于仿真中的风电机组本地控制器,与其风速相关的状态反馈来自所测量的本机机舱风速。
3.2 风电场AGC功率优化控制目标
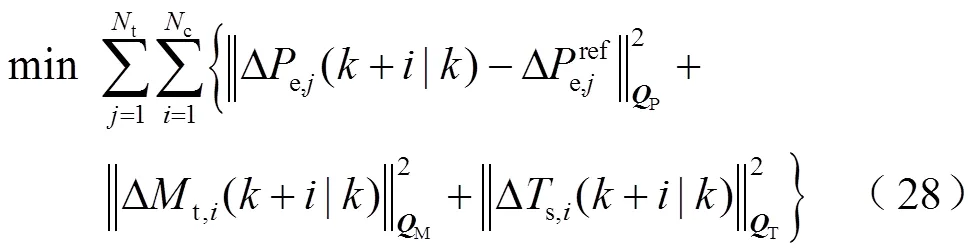
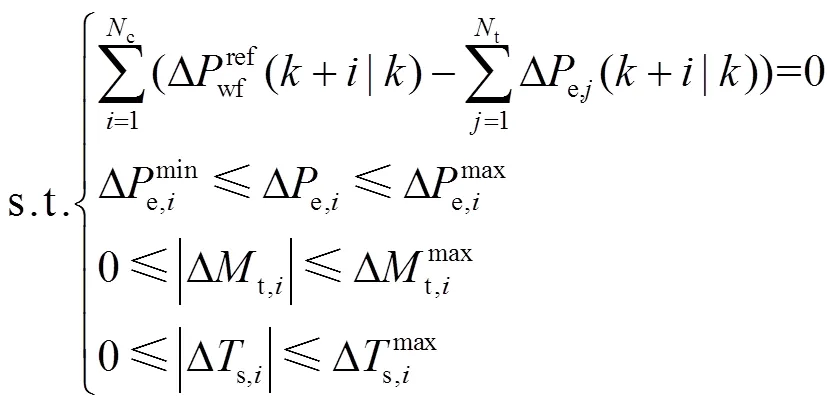
采用第2节中所提风电机组AGC功率控制模型,风电机组的本地控制器可以计算单机层面的优化控制方案。进一步地,通过与风电场控制中心进行的信息共享和迭代,确保全场AGC功率总和满足全局约束。根据以上定义,可将风电场有功功率的最佳控制的全局目标函数设置为式(28)和式(29),即
3.3 风电场分布式AGC求解算法
ADMM是乘子法的扩展,它允许采用分布式公式,在对偶公式中使用增广拉格朗日函数,是一种收敛性较好的DMPC求解方法。针对3.2节中所描述的优化问题,采用ADMM进行求解的具体方法如下。

式中,c,i和b为将式(29)中的后三个约束转换成标准二次规划形式时获得的约束矩阵。同时,


进一步地,可以得到ADMM算法所需增广拉格朗日函数,即
由于和是一个控制周期内的可测量参数,为简化表达式,令

因此,可以推导出式(30)的求解公式为



4 算例分析
4.1 仿真系统搭建
本文通过Matlab/Simulink搭建仿真系统以验证本文所建风电机组多入多出控制模型和风电场分布式控制算法。用于做验证的风电机组为NREL 5MW机组,主要参数如文献[29]所介绍。在单机模型的基础上,本文搭建了一个3×3排列的风电场模型,风机排列情况如图5所示,场内风电机组之间的间距为400m。仿真过程中风电场的来流风速平均值为14m/s,湍流强度为0.1,场内尾流的计算基于Sim Wind Farm[28],如图6所示,场内9台机组的风速波动范围约为9~18m/s,覆盖了机组多种运行工况。
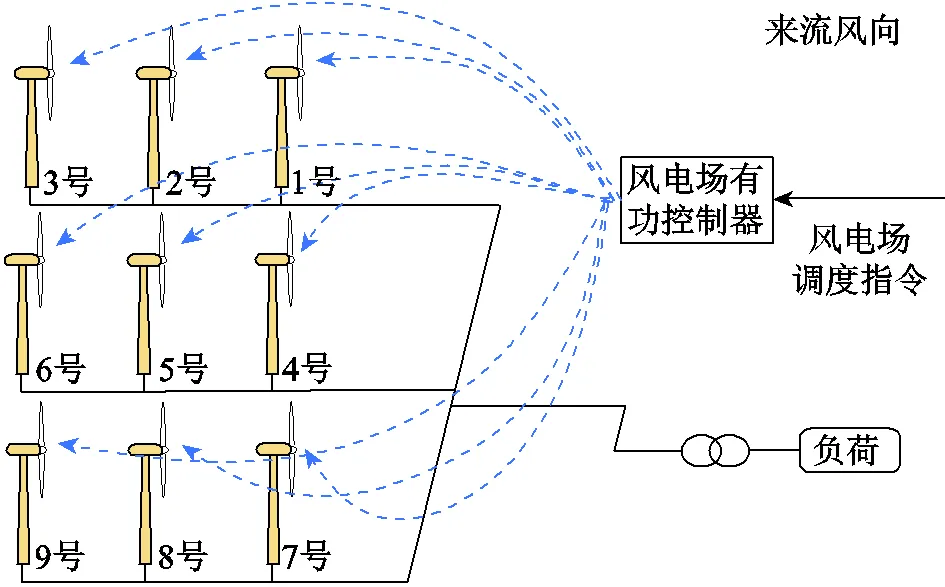
图5 机组排布与尾流效果图
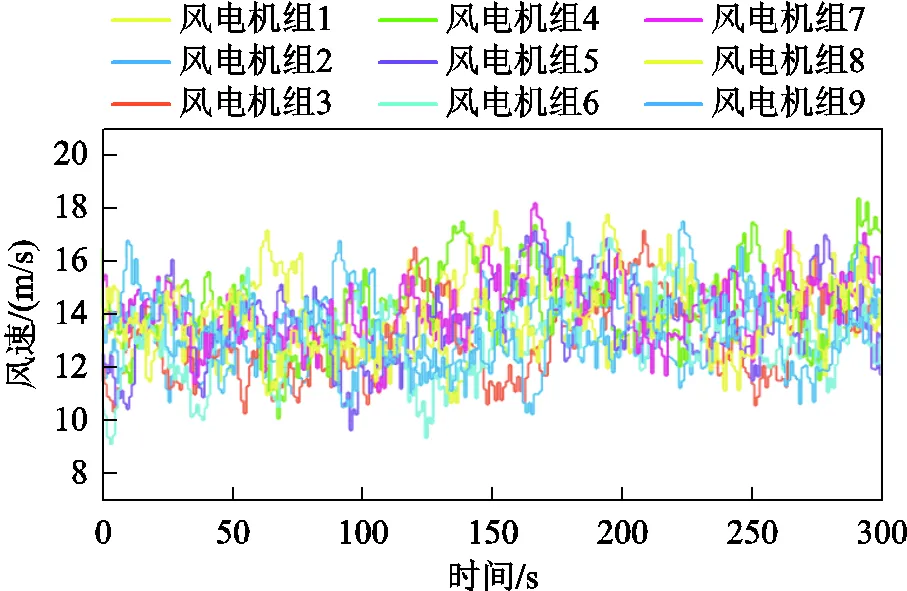
图6 风电场9台机组仿真风速
在仿真过程中,风电机组层面的控制方案由传统的超速+变桨控制[30]与本文提出的多入多出控制模型进行对比;风电场层面的功率分配策略采用传统的以最大发电能力计算的等比例分配策略[31]和本文提出的灵活分配策略进行对比;功率控制器则由传统的PI控制器、MPC控制器[9]与本文提出的DMPC控制器相对比。仿真中策略的组合情况见表1。
表1 仿真中策略的组合情况

Tab.1 Combination of strategies in simulation
4.2 风电场AGC控制结果分析
以丹麦风电并网标准为例,风电场需要具备限制有功出力和功率爬坡的能力[32]。本算例中,风电场处于受调度指令控制的状态,初始功率指令为25MW,60s时指令开始爬坡,180s时指令增加至30MW并一直保持恒定至300s。基于表1所示策略的风电场有功出力结果如图7所示。
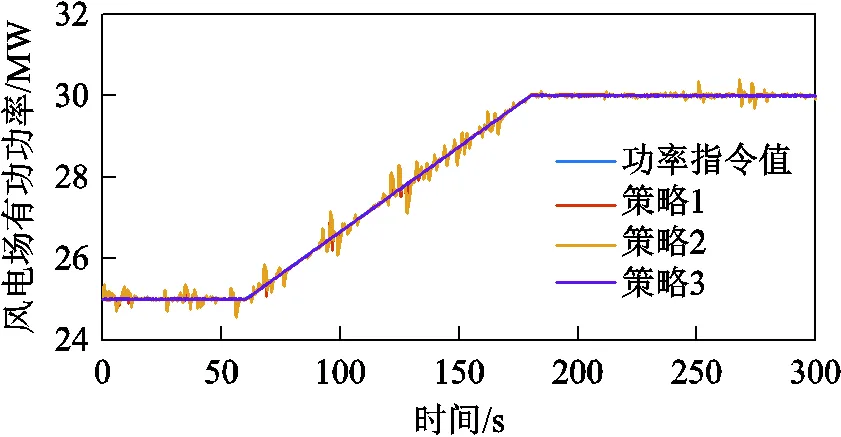
图7 不同策略下风电场出力对比
由图7可知三种策略均能有效实现风电场AGC功率指令值。其中,策略1和策略2的出力结果较指令值出现了明显的毛刺,这是由于采用等比例分配时需通过风电机组风速的测量来计算机组的最大出力,再按比例进行功率分配。这一过程中存在风速测量误差,从而导致最终的风电场输出功率出现了与指令值的偏差。虽然三种策略都能够较好地完成调度对风电场的AGC功率要求,但相比之下,采用功率灵活分配框架的策略3则更好地完成了调度指令。
进一步地,根据MCrunch算法计算得到场内风电机组在三种策略下的疲劳载荷情况见表2。
表2 不同策略下风电机组的损伤等效载荷
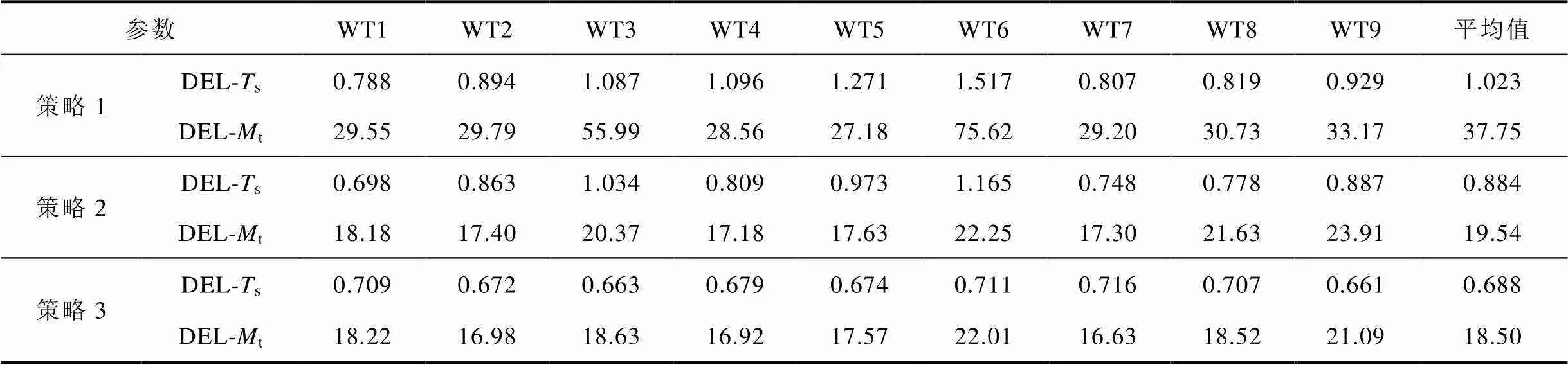
Tab.2 DELs of wind turbines under different strategies (单位:MN·m)
表2中,DEL-s和DEL-t分别为传动系统和塔架对应的DEL值。由计算结果可以看出,对比策略1,由于策略2采用了本文提出的多入多出控制模型,对比传统的机组控制方案,疲劳载荷得到了降低,全场机组传动系统和塔架疲劳的平均值分别下降了12.3%和38.5%。然而策略2对场级功率分配没有进行优化,本文所提的策略3通过进一步的优化分配,使得机组的疲劳载荷得到了更进一步的降低,全场机组传统系统和塔架疲劳的平均值相对于策略2再次降低了22.2%和5.3%。
由此可见,在风电场层面,本文所建机组控制模型和分布式控制框架可以在完成调度要求的功率指令的前提下,有效降低机组的疲劳程度。
4.3 风电机组控制结果分析
4.2节从风电场层面讨论了本文所建模型和所提控制策略的效果,可以看到风电场内所有机组的疲劳载荷较采用传统的策略1均有了明显降低,但各机组降低的程度有所不同。本节以采用策略1时疲劳载荷最高的6号风机(WT6)为例,分析各策略下风电机组层面的状态变化情况。
WT6的机舱测量风速如图8a所示,由于湍流的存在,风速在9~17m/s间波动。采用等比例分配时,低于额定风速会被分配比例较低的功率指令,因此有功功率如图8b所示,策略1和策略2在图8a中风速低于12m/s时功率都出现了明显波动。而策略1和策略2都是工作于等比例分配的框架下,单机接收到功率指令值相同,因此出力也基本相同,这也进一步证实了本文所提控制模型的有效性。对于本文所提的策略3,由于采用了分布式的控制框架,在图8b中,功率指令更为平滑。
在图8c和图8d中,采用策略2和策略3时可以同时调整转速设定值和桨距角设定值,发电机转速不需要一直限制在额定值附近波动,桨距角波动更为平缓。如图8e和图8f所示,这样的状态变化导致机组的主轴转矩和塔根弯矩的波动在采用策略2和策略3时都更加平缓,尤其是采用策略3时,这与表2中的疲劳载荷结果相吻合。
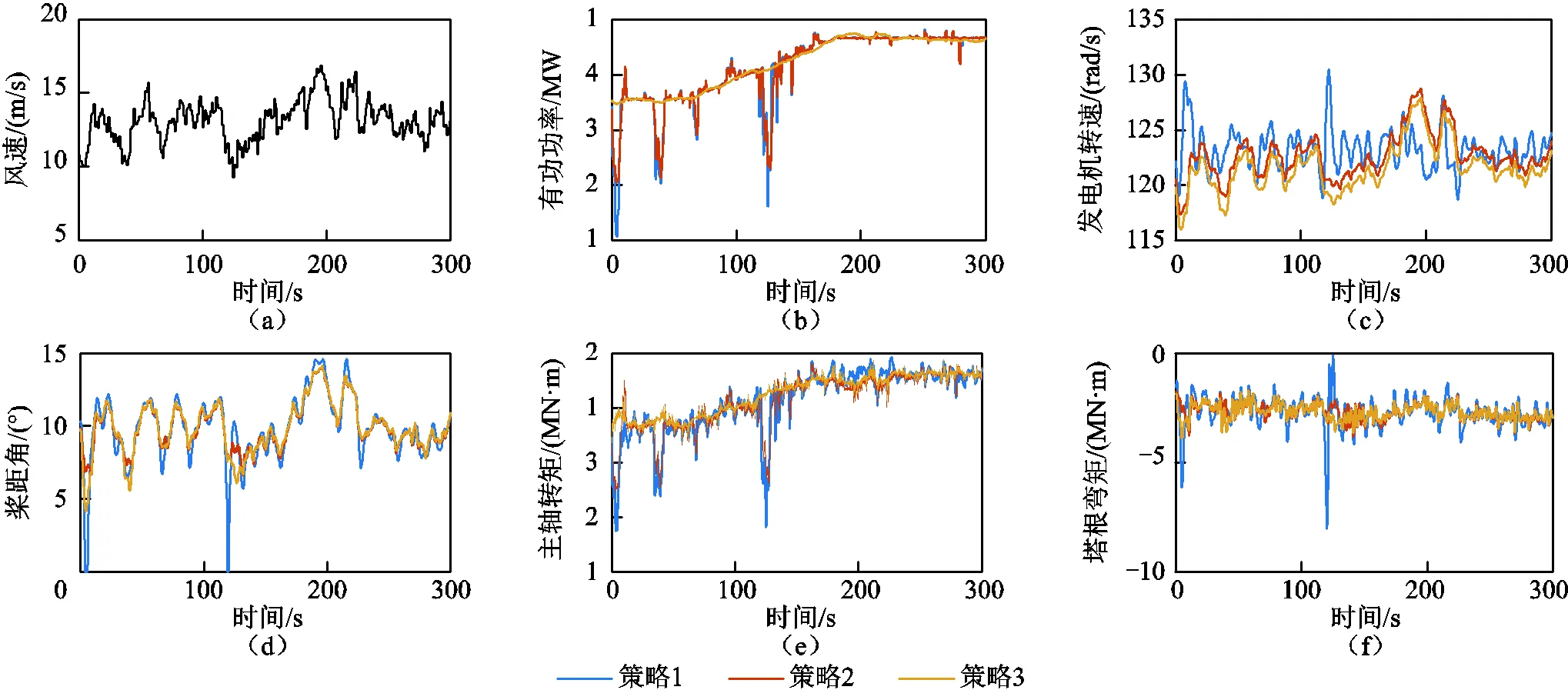
图8 WT6机组在仿真过程中的状态变化
5 结论
本文以风电场AGC控制过程为研究对象,在跟踪调度指令的前提下,考虑在控制过程中的风电机组疲劳载荷优化问题,并就此提出了一种风电机组控制模型和分布式的风电场AGC框架,得出以下结论:
1)本文通过对风电机组非线性模型的线性化,建立了一种考虑有功功率输出和疲劳载荷指标的多入多出线性模型,通过单一控制器可以完成对转子转速和桨距角的同时调整,较传统控制方法更加灵活,可明显降低机组运行的疲劳载荷。
2)本文建立了一种基于ADMM的风电场分布式AGC控制框架,实现对多入多出风电机组模型的有效控制,可以有效得完成调度设定的有功功率参考值,并且通过优化计算进一步降低机组运行的疲劳载荷。
[1] 穆钢, 蔡婷婷, 严干贵, 等. 双馈风电机组参与持续调频的双向功率约束及其影响[J]. 电工技术学报, 2019, 34(8): 1750-1759.
Mu Gang, Cai Tingting, Yan Gangui, et al. Bidirectional power constraints and influence of doubly fed induction generator participating in continuous frequency regulation[J]. Transaction of China Electrotechnical Society, 2019, 34(8): 1750-1759.
[2] Guo Xiaoqiang, Chen Weijian. Control of multiple power inverters for more electronics power systems: a review[J]. CES Transactions on Electrical Machines and Systems, 2018, 2(3): 255-263.
[3] 王涛, 诸自强, 年珩. 非理想电网下双馈风力发电系统运行技术综述[J]. 电工技术学报, 2020, 35(3): 455-471.
Wang Tao, Zhu Ziqiang, Nian Hang. Review of operation technology of doubly-fed induction generator-based wind power system under nonideal grid conditions[J]. Transactions of China Electrotechnical Society, 2021, 36(3): 579-587.2020, 35(3): 455-471.
[4] 麻秀范, 王戈, 朱思嘉, 等. 计及风电消纳与发电集团利益的日前协调优化调度[J]. 电工技术学报, 2021, 36(3): 579-587.
Ma Xiufan, Wang Ge, Zhu Sijia, et al. Coordinated day-ahead optimal dispatch considering wind power consumption and the benefits of power generation group[J]. Transactions of China Electrotechnical Society, 2021, 36(3): 579-587.
[5] 杨正清, 汪震, 展肖娜, 等. 考虑风电有功主动控制的两阶段系统备用双层优化模型[J]. 电力系统自动化, 2016, 40(10): 31-37.
Yang Zhengqing, Wang Zhen, Zhan Xiaona, et al. Bi-level optimization model of two-stage reserve scheduling with proactive wind power control[J]. Automation of Electric Power Systems, 2016, 40(10): 31-37.
[6] Guo Yifei, Gao Houlei, Wu Qiuwei, et al. Distributed coordinated active and reactive power control of wind farms based on model predictive control[J]. International Journal of Electrical Power & Energy Systems, 2019, 104: 78-88.
[7] Hu Jianqiang, Chen M Z Q, Cao Jinde, et al. Coordinated active power dispatch for a microgrid via distributed lambda iteration[J]. IEEE Journal on Emerging and Selected Topics in Circuits and Systems, 2017, 7(2): 250-261.
[8] 苏永新, 段斌, 朱广辉, 等. 海上风电场疲劳分布与有功功率统一控制[J]. 电工技术学报, 2015, 30(22): 190-198.
Su Yongxin, Duan Bin, Zhu Guanghui, et al. Fatigue distribution and active power combined control in offshore wind farm[J]. Transaction of China Electrotechnical Society, 2015, 30(22): 190-198.
[9] Riverso S, Mancini S, Sarzo F, et al. Model predictive controllers for reduction of mechanical fatigue in wind farms[J]. IEEE Transactions on Control Systems Technology, 2017, 25(2): 535-549.
[10] Zhao Haoran, Wu Qiuwei, Huang Shaojun, et al. Fatigue load sensitivity-based optimal active power dispatch for wind farms[J]. IEEE Transactions on Sustainable Energy, 2017, 8(3): 1247-1259.
[11] Knudsen T, Bak T, Svenstrup M. Survey of wind farm control-power and fatigue optimization[J]. Wind Energy, 2015, 18(8): 1333-1351.
[12] Zhang Baohua, Soltani M, Hu Weihao, et al. Optimized power dispatch in wind farms for power maximizing considering fatigue loads[J]. IEEE Transactions on Sustainable Energy, 2018, 9(2): 862-871.
[13] 刘吉臻, 孟洪民, 胡阳. 采用梯度估计的风力发电系统最优转矩最大功率点追踪效率优化[J]. 中国电机工程学报, 2015, 35(10): 2367-2374.
Liu Jizhen, Meng Hongmin, Hu Yang. Efficiency optimization of optimum torque maximum power point tracking based on gradient approximation for wind turbine generator system[J]. Proceedings of the CSEE, 2015, 35(10): 2367-2374.
[14] 姚琦, 刘吉臻, 胡阳, 等. 含异步变速风机的风电场一次调频等值建模与仿真[J]. 电力系统自动化, 2019, 43(23): 185-192.
Yao Qi, Liu Jizhen, Hu Yang, et al. Equivalent modeling and simulation for primary frequency regulation of wind farm with asynchronous variable-speed wind turbines[J]. Automation of Electric Power Systems, 2019, 43(23): 185-192.
[15] Wang Shu, Seiler P. LPV Active power control and robust analysis for wind turbines[C]//33rd Wind Energy Symposium, Kissimmee, Florida: American Institute of Aeronautics and Astronautics, 2015.
[16] 刘军, 张彬彬, 赵婷. 基于模糊评价的风电场有功功率分配算法[J]. 电工技术学报, 2019, 34(4): 786-794.
Liu Jun, Zhang Binbin, Zhao Ting. Research on wind farm active power dispatching algorithm based on fuzzy evaluation[J]. Transaction of China Electrotechnical Society, 2019, 34(4): 786-794.
[17] Zhao Haoran, Wu Qiuwei, Guo Qinglai, et al. Distributed model predictive control of a wind farm for optimal active power control part I: clustering-based wind turbine model linearization[J]. IEEE Transactions on Sustainable Energy, 2015, 6(3): 831-839.
[18] Luo Haocheng, Hu Zechun, Zhang Hongcai, et al. Coordinated active power control strategy for deloaded wind turbines to improve regulation performance in AGC[J]. IEEE Transactions on Power Systems, 2019, 34(1): 98-108.
[19] Tang Xuesong, Yin Minghui, Shen Chun, et al. Active power control of wind turbine generators via coordinated rotor speed and pitch angle regulation[J]. IEEE Transactions on Sustainable Energy, 2019, 10(2): 822-832.
[20] Hoek D van der, Kanev S, Engels W. Comparison of down-regulation strategies for wind farm control and their effects on fatigue loads[C]//2018 Annual American Control Conference (ACC), 2018: 3116-3121.
[21] Spudic V. Coordinated optimal control of wind farm active power[D]. Croatia: University of Zagreb, 2012.
[22] Jin Jingliang, Zhou Dequn, Zhou Peng, et al. Dispatching strategies for coordinating environmental awareness and risk perception in wind power integrated system[J]. Energy, 2016, 106: 453-463.
[23] Zhang Jinhua, Liu Yongqian, Infield D, et al. Optimal power dispatch within wind farm based on two approaches to wind turbine classification[J]. Renewable Energy, 2017, 102: 487-501.
[24] Wang Lei, Wen Jie, Cai Ming, et al. Distributed Optimization control schemes applied on offshore wind farm active power regulation[J]. Energy Procedia, 2017, 105: 1192-1198.
[25] Yao Qi, Hu Yang, Chen Zhe, et al. Active power dispatch strategy of the wind farm based on improved multi-agent consistency algorithm[J]. IET Renewable Power Generation, 2019, 13(14): 2693-2704.
[26] Zhao Haoran, Wu Qiuwei, Guo Qinglai, et al. Distributed model predictive control of a wind farm for optimal active power control part II: implementation with clustering-based piece-wise affine wind turbine model[J]. IEEE Transactions on Sustainable Energy, 2015, 6(3): 840-849.
[27] 李世春, 黄悦华, 王凌云, 等. 基于转速控制的双馈风电机组一次调频辅助控制系统建模[J]. 中国电机工程学报, 2017, 37(24): 7077-7086, 7422.
Li Shichun, Huang Yuehua, Wang Lingyun, et al. Modeling primary frequency regulation auxiliary control system of doubly fed induction generator based on rotor speed control[J]. Proceedings of the CSEE, 2017, 37(24): 7077-7086, 7422.
[28] Aalborg University. SimWindFarm Toolbox[EB/OL]. /2020-03-07. http://www.ict-aeolus.eu/SimWindFarm/ index.html.
[29] Jonkman J, Butterfield S, Musial W, et al. Definition of a 5-MW reference wind turbine for offshore system development[R]. NREL/TP-500-38060, 947422, 2009.
[30] Yao Qi, Liu Jizhen, Hu Yang. Optimized active power dispatching strategy considering fatigue load of wind turbines during de-loading operation[J]. IEEE Access, 2019, 7: 17439-17449.
[31] Merahi F, Berkouk E, Mekhilef S. New management structure of active and reactive power of a large wind farm based on multilevel converter[J]. Renewable Energy, 2014, 68: 814-828.
[32] Regulations for grid connection | Energinet[EB/OL]. 2019-10-24. https://en.energinet.dk/Electricity/Rules- and-Regulations/Regulations-for-grid-connection.
Distributed Automatic Generation Control of Wind Farm Considering Load Suppression
Yao Qi1Hu Yang2Liu Yu3Luo Zhiling2Qi Xiao1
(1. Energy and Electricity Research Center Jinan University Zhuhai 519070 China 2. School of Control and Computer Engineering North China Electric Power University Beijing 102206 China 3. North Electric Power Dispatch and Control Sub-Center State Grid Corporation of China Beijing 100053 China)
To optimize the fatigue load of wind turbines during automatic generation control (AGC) process, a novel wind turbine control model was proposed and applies it to the wind farm. A multi-input and multi-output (MIMO) wind turbine control model was established, so that the wind turbine can control the rotor speed and pitch angle simultaneously. Then, a wind farm control system based on a distributed framework was designed to make wind turbines coordinate with each other to directly optimize the rotor speed and pitch angle of all turbines with the goal of load suppression. The simulation results show that the proposed control model can achieve more flexible and effective control of wind turbines. Combined with the distributed control framework, the fatigue load of wind turbines can be significantly reduced under the premise of completing AGC instructions.
Automatic generation control(AGC), fatigue load, wind farm, distributed control
10.19595/j.cnki.1000-6753.tces.201602
TM614
广东省基础与应用基础研究基金青年基金(2020A1515110547)和国家自然科学基金联合基金(U1766204)资助项目。
2020-12-07
2021-03-18
姚 琦 男,1994年生,博士,讲师,研究方向为风力发电系统及其控制。E-mail:qiyao@jnu.edu.cn
綦 晓 男,1992年生,博士,讲师,研究方向为综合能源系统控制。E-mail:qixiao@jnu.edu.cn (通信作者)
(编辑 赫蕾)
猜你喜欢
湖南电力(2022年3期)2022-07-07
能源工程(2021年2期)2021-07-21
船舶标准化工程师(2020年1期)2020-06-12
电子制作(2018年17期)2018-09-28
能源(2018年6期)2018-08-01
能源(2018年6期)2018-08-01
能源(2018年8期)2018-01-15
制导与引信(2017年3期)2017-11-02
发明与创新(2016年7期)2016-04-20
风能(2016年12期)2016-02-25