基于电子助力器的冗余防抱死制动算法研究*
2022-02-18 01:44:12刘晓辉于良耀卢正弘
汽车工程 2022年1期
刘晓辉,于良耀,郑 晟,卢正弘,宋 健
(清华大学,汽车安全与节能国家重点实验室,北京 100084)
前言
为适应汽车智能化、电动化与网联化的要求,汽车制动系统也在向线控化发展,国内外出现了多种不同结构的电子助力器。电子助力器作为智能汽车底盘核心零部件之一,不仅可以满足智能汽车对自适应巡航(ACC)、自动紧急制动(AEB)、自动泊车和自动无人驾驶等方面的功能要求,还可实现高品质和高冗余的车辆稳定性控制。
制动防抱死系统(ABS)的作用是在车辆制动时,自动控制制动器制动力的大小,使车轮不被抱死,处于边滚边滑(滑移率在20%左右)的状态,以保证车轮与地面的附着力在最大值。随着智能底盘与电子助力器的应用,当传统的ABS 系统发生故障时,电子助力器可以控制伺服电机对制动主缸液压力进行调节,从而控制车轮滑移率,实现制动系统的冗余ABS功能。基于电子助力器实现车辆制动冗余ABS 功能主要须解决两个问题:制动主缸液压力的精准控制和快速响应、制动防抱死控制。
于良耀、王治中、Panzani 基于制动总泵液压力和活塞推杆位移为双控制变量的闭环反馈,提出比例-积 分-微 分(proportional-integral-derivative,PID)的控制算法。王治中等采用增益式PI 控制算法对系统制动总泵液压力进行控制。Leiber 等采用模型预测算法对制动总泵液压力进行控制。余卓平等采用田口方法+分段比例-积分的控制算法对EHB 执行机构主缸制动压力的控制进行了研究,采用比例-积分-微分、滑模变结构、模型预测等控制算法,对EHB 线控制动系统的主缸活塞位移进行闭环控制,利用液压系统的PV特性实现了对制动总泵压力的间接控制。部分学者基于前馈和反馈同时控制其开发的电子伺服制动系统(electric servo braking system,ESB)的制动总泵液压力。德尔福公司在电机内部加装传感器,通过对电机旋转角度的控制,间接对EHB 系统制动总泵液压力的控制进行了研究,采用切换控制和串级控制算法,对制动总泵液压力和制动总泵活塞推杆位移同时进行控制,进而实现对EHB 系统液压制动力的控制。以上研究在液压力控制过程中关于输入频率、建压抖动和迟滞等问题方面还有改善空间。
博世公司通过电子助力制动系统(iBooster)和电子稳定性控制系统(ESP)的配合,可以实现主动制动、制动能量回收和冗余ABS 控制等功能。熊璐等基于电子液压制动系统的线控和解耦特性,以四轮均不抱死为控制目标,实现冗余ABS控制功能。陈志成等基于电控助力制动级联制动防抱死控制策略,并初步实现了冗余ABS 防抱死功能。Zhao等提出一种基于电子液压制动系统(EHB)的车轮滑移率控制方法,通过最优控制算法实现四轮制动压力的分配和控制。孙凯基于线性参数化制动系统模型设计了一种静态反馈鲁棒ABS 控制器,对于道路附着系数和车速的变化具有较好的鲁棒性。上述研究大多关注在冗余ABS 功能的实现,并未将车辆制动强度和制动舒适性放在优化目标内。
本文中针对传统ABS 功能失效的情况(电机失效、开关阀无法关闭),基于自主设计的半解耦式电子助力器,对冗余ABS控制算法展开研究。首先,对eBooster进行精准液压力控制研究,实现制动主缸液压力的精准控制和快速调整;然后,建立eBooster、冗余ABS、轮胎和整车等数学模型;最后,在试验车(哈弗H6)上完成冗余ABS控制算法的验证。
1 整车模型
在车辆稳定性控制中,根据车辆的动力学模型来计算合理的反馈控制增益是提升车辆动力学稳定性的必要步骤。综合考虑模型解算的复杂性和计算精度,选用四轮车辆模型,该模型忽略了车辆的俯仰和侧倾运动。相比于两轮“Bicycle”模型,使用四轮车辆模型可以通过垂向载荷的变化来计算每个车轮的速度及滑移率,并得到各个车轮的方向及侧偏角,而这些参数都与轮胎特性有关,且便于本文所选用的Dugoff 轮胎模型的计算,可以提升车辆动力学模型的准确性。
1.1 车辆动力学模型
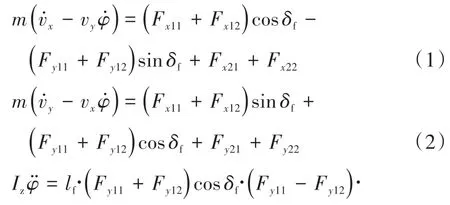
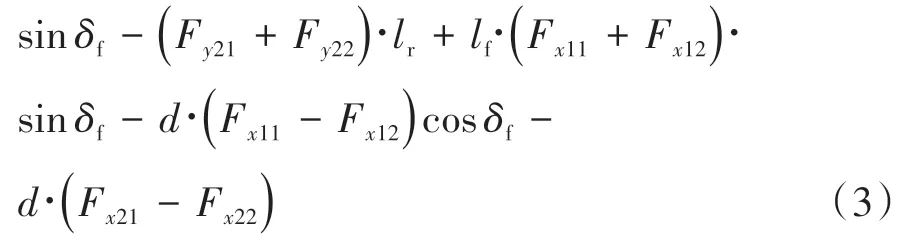
整车模型如图1 所示,其中F表示各个车轮的纵向力,F表示各个车轮的侧向力,表示前轴中心与质心间的纵向距离,表示后轴中心与质心间的纵向距离,表示前后轴轴距,表示单侧车轮与质心间的横向距离,v表示车辆坐标系下的纵向速度,v表示车辆坐标系下的横向速度,α表示各个车轮的侧偏角,表示车辆的质心侧偏角,表示整车质量。
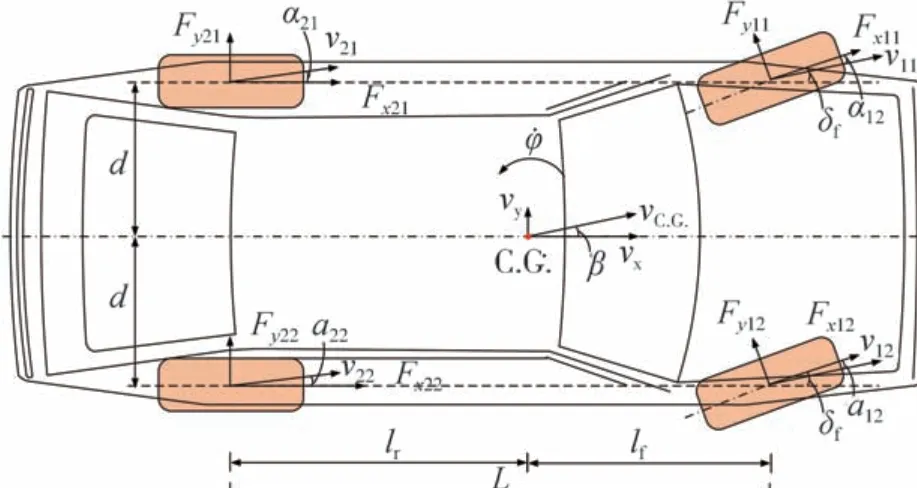
图1 车辆动力学模型
车辆的纵向、横向以及横摆动力学方程为
车辆基于大地坐标系的横向/纵向速度及运动学方程如下:
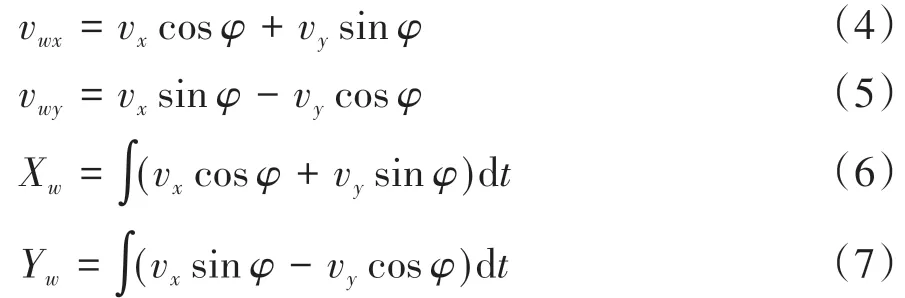
式中:v表示大地坐标系下车辆的纵向速度;v表示大地坐标系下车辆的横向速度;(X,Y)表示大地坐标系下车辆的实际位置。虽然在模型搭建过程中忽略了侧倾和俯仰运动,但考虑到车辆载荷转移对轮胎的动力学特性影响较大,仍然需要对4 个车轮的受力情况进行分析,可以得到如下4 个车轮的载荷变化:
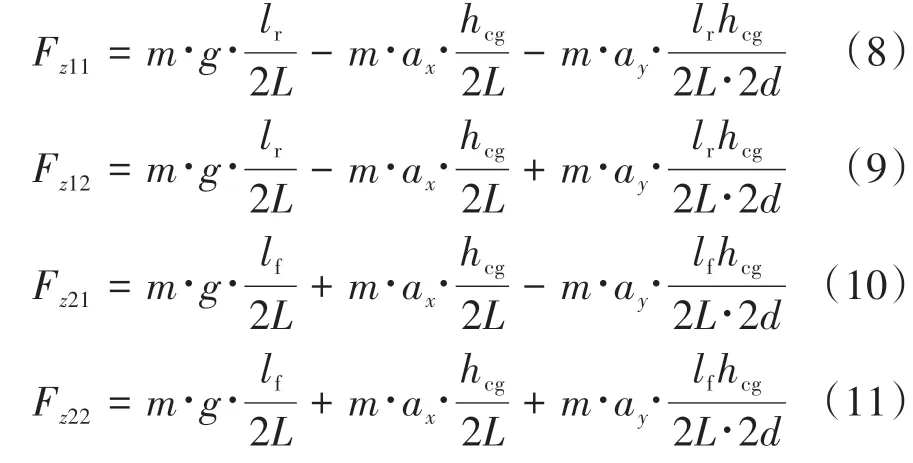
式中:F表示各个车轮的垂向载荷;a表示车辆在车身坐标系下的纵向加速度;a表示车辆在车身坐标系下的侧向加速度。在本文所进行的动力学稳定性控制策略研究过程中采用了前驱车辆作为研究对象,因此可以得到如下4个车轮的动力学方程:
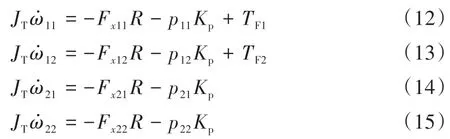
式中:ω表示各个车轮的转速;表示车轮半径;表示车轮转动惯量;p表示各个车轮的轮缸压力;表示由轮缸压力转换为制动力矩时的压力力矩系数;表示根据发动机输出的转矩经传动系统转化得到的两个驱动轮的驱动力矩。
1.2 轮胎模型
在当前有多种轮胎模型可以用于车辆的动力学稳定性控制,例如线性轮胎模型、Magic Formula轮胎模型、统一半经验轮胎模型和Dugoff轮胎模型等。由于本文研究目的之一是拓展车辆的动力学稳定性控制范围,一旦轮胎侧向力达到饱和,车辆的侧向动力学稳定性将具备明显的非线性特征,此时就难以使用简单的线性轮胎模型。相比于其他轮胎模型,Dugoff轮胎模型在考虑了轮胎横向/纵向动力学特性的同时,由于其公式简洁使计算量较小,相关变量便于通过传感器获得,且对轮胎参数依赖度低,极大地便利了工程应用。因此采用Dugoff轮胎模型来进行轮胎力的估算,其纵向/横向轮胎力可通过如下公式获得:
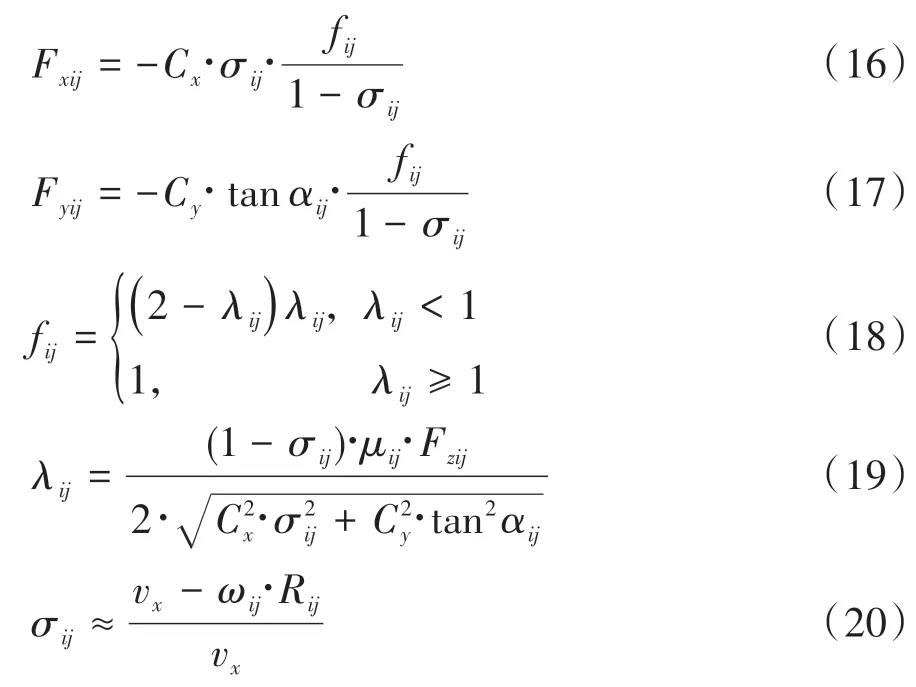
式中:R表示车轮半径;σ表示轮胎滑移率,下标=1,2 分别表示前后轮胎,下标=1,2 分别表示左轮胎和右轮胎。4个车轮的侧偏角计算公式为
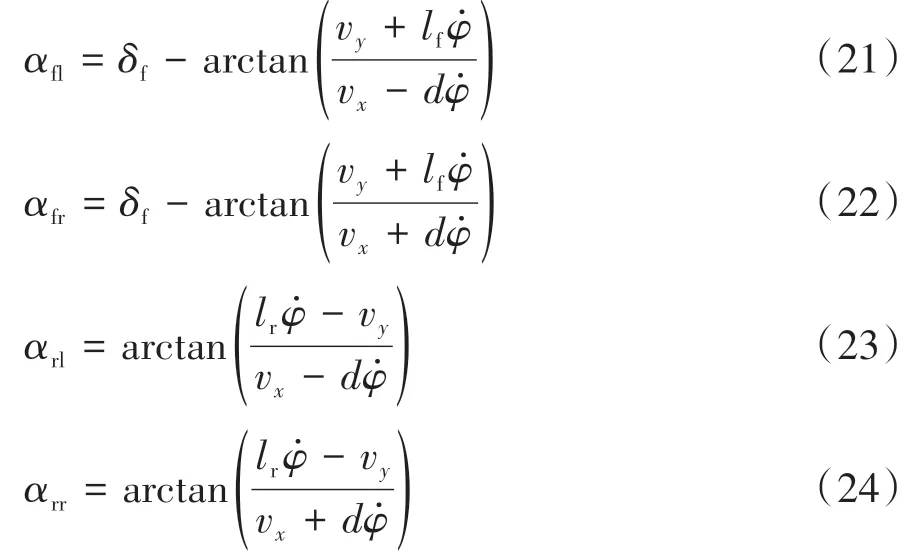
式中:为轮胎转角;为轮胎侧偏角;为车辆横摆角。
在车轮载荷不变的情况下,通过Matlab 仿真测试了轮胎在组合滑移条件下的侧向力特性。此外,还探讨了两种不同的路面摩擦因数对轮胎侧向力特性的影响,道路摩擦因数分别为0.2 和0.8。图2 为Dugoff 轮胎模型纵向/侧向力与滑移率/侧偏角之间的关系。结果表明,滑移率不同时,轮胎纵向/侧向力的特性有很大的不同。如果轮胎的侧向滑移角和滑移率出现变化,也会使轮胎的纵向/侧向力产生较大的变化,因此在研究轮胎侧向力的过程中应考虑轮胎的联合滑移。
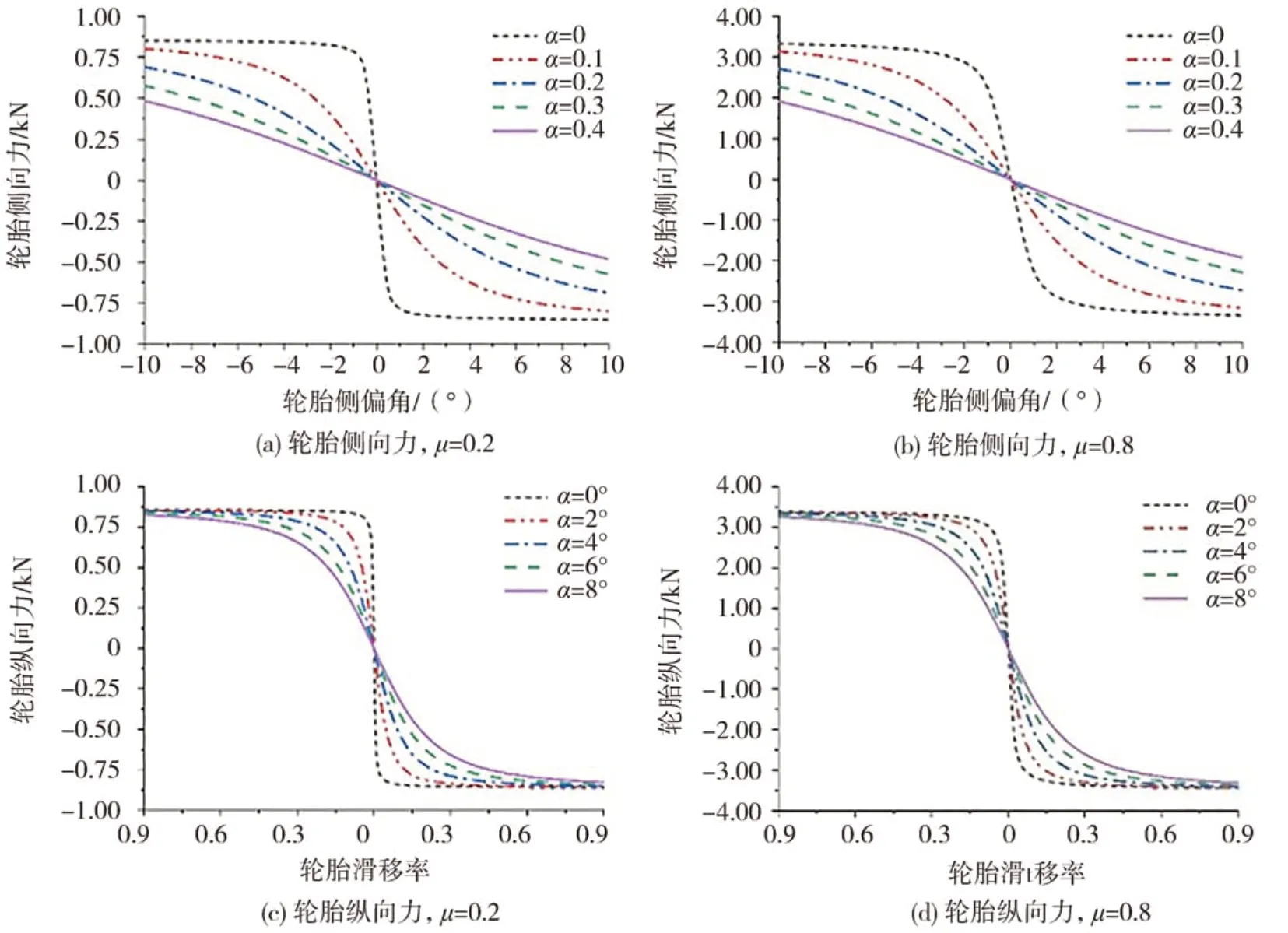
图2 轮胎纵向/侧向力与滑移率/侧偏角之间的关系
2 电子助力制动系统
本文中基于新能源电动车对制动系统配合电驱动系统进行能量回收的功能需求和舒适性提高的性能需求,自主设计和研发了一款半解耦电子助力制动器。该电子助力制动系统由eBooster 驱动电机、减速增转矩机构、制动主缸、制动轮缸、控制器、制动踏板和制动管路等组成。
2.1 电子助力器工作原理
电子助力器工作原理如图3 所示,具体描述如下:踏板推杆与制动总泵推杆断开,两者之间存在一定的间隙;当驾驶员踩下制动踏板时,踏板推杆向前运动,位移传感器磁块跟随踏板推杆(位移传感器磁块通过位移传感器磁块支架固定在踏板推杆上)同时向前运动,踏板推杆与制动总泵推杆之间的间隙减小,此时eBooster 控制器检测到位移传感器信号后,驱动助力电机旋转,电机通过电机齿轮、中间齿轮、梯形丝杆螺母齿轮减速增转矩后将力矩传递出去;梯形丝杆螺母齿轮带动梯形丝杆螺母旋转,梯形丝杆螺母通过梯形丝杆将转动力矩转化为前后平动推力;梯形丝杆推动滑动法兰盘、滑动法兰盘推动制动总泵推杆顶住制动主缸活塞压缩制动液进而产生制动压力,此时踏板推杆与制动总泵推杆之间的间隙增大,整个助力制动过程中,踏板推杆与制动总泵活塞不会接触。当出现紧急制动或电机助力失效时,踏板推杆与制动主缸活塞接触,驾驶员通过踩踏制动踏板,将制动力作用到制动主缸活塞上,建立一定强度的制动压力,实施制动。
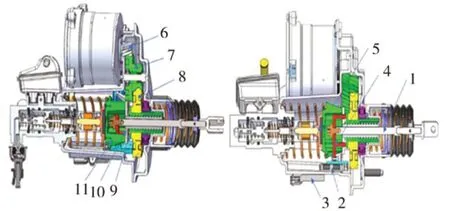
图3 eBooster工作原理图
2.2 电机及减速增转矩机构
eBooster 动力与传动系统结构表述如图4 所示。电机是总泵助力式线控制动系统的动力源,电机的转速和转矩通过传动机构进行减速增转矩,最终推动制动主缸建压。
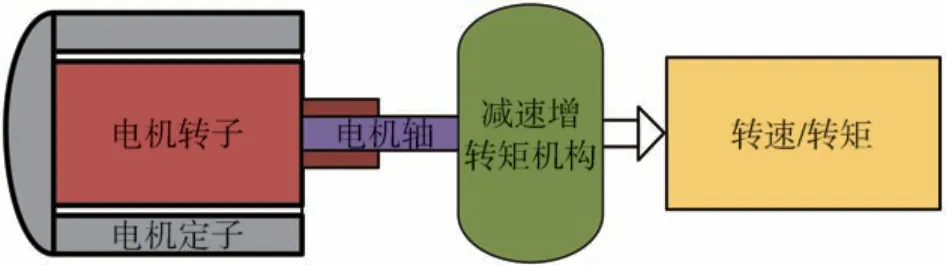
图4 eBooster电机与减速增转矩机构
电机的电压方程为
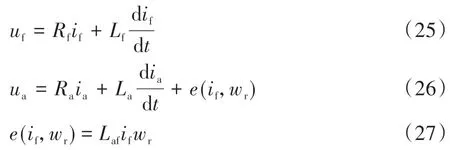
电磁转矩方程为

转矩平衡方程为

电压和电流之间的约束关系为

励磁电流、电枢电流和转子角速度的状态方程为
减速增扭机构的作用是减速增转矩,并将电机的转动转化为推动制动总泵活塞的平动。不同的减速比会带来不同的响应时间和液压控制效果。

式中:和代表励磁电压和电枢电压;和代表励磁电流和电枢电流;和代表励磁电阻和电枢电阻;和代表对应的自感系数;与励磁电流和转子转速有关,代表运动感生电动势系数;代表电机的输出转矩;代表电机负载转矩;代表减速增转矩机构的减速比;代表减速增转矩机构的输出转矩;代表电机的输出转速;代表减速增转矩机构的输出转速。电机的参数设置参考实际选用的电机参数。
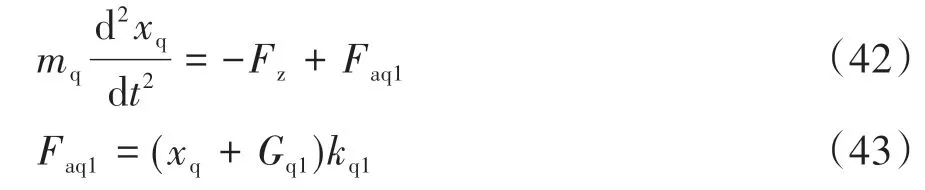
2.3 液压元件模型
总泵助力式线控制动系统的液压元件主要由制动总泵、制动轮缸、制动管路组成。
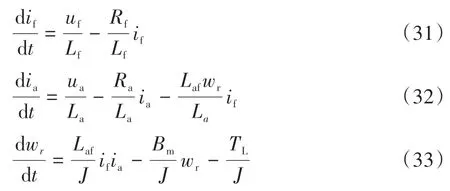
制动总泵结构如图5 所示。制动总泵选用某乘用车车型使用的中心阀双腔式制动总泵来建模,该制动总泵是量产标件,可靠性得到保证。制动总泵的前腔活塞在制动力的作用下推动弹簧阻尼元件,克服前后腔活塞之间的间隙。间隙消除后活塞需要克服等效弹簧的阻力继续向前移动。
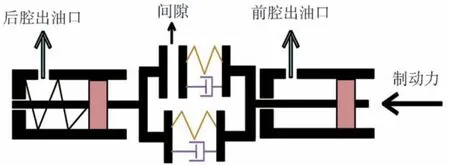
图5 eBooster工作原理
制动总泵前后腔活塞的运动方程为
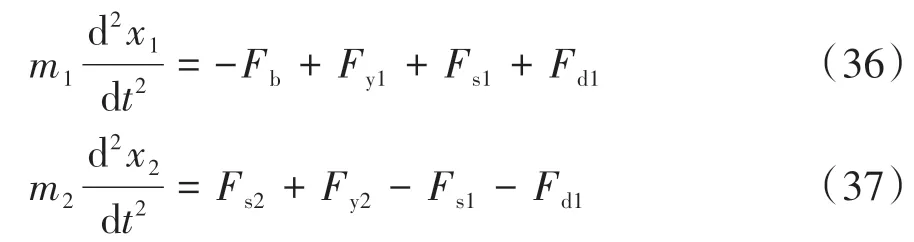
式中:和代表制动总泵前后腔活塞的质量;和代表两个活塞的位移;和代表两个活塞上受到的压力;代表作用在无间隙弹簧上的力;代表作用在制动总泵后腔腔内弹簧上的力;代表阻尼力。
无间隙弹簧受到的力和阻尼力可以按以下方程式计算:
式中:为无间隙弹簧刚度;为阻尼系数;为弹簧预紧力。
制动总泵前后腔制动液流速方程为

式中:和代表制动总泵前后腔制动液流速;和代表制动总泵前后腔的有效面积。
制动轮缸的数学模型和制动总泵模型是相似的,其结构见图6。
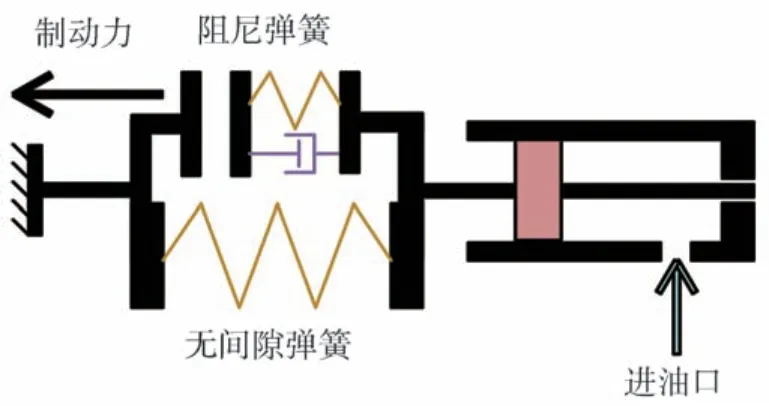
图6 制动轮缸结构
制动轮缸受力的动态方程为
式中:为制动钳质量;x为制动钳位移;F为制动力;为回位弹簧的力;为回位弹簧的刚度;为回位弹簧的预紧力。
制动液压在通过制动管路时有液压压降,尤其是在通过制动软管时,液压压降方程为

式中:为液压压降;为阻尼系数;为制动管路的长度;为制动管路直径;为制动液在管路中的流速。
3 冗余ABS模型
冗余ABS 控制系统架构如图7 所示。通过对制动、转向、驱动等系统的信号检测来进行驾驶员意图识别,在驾驶员实施制动时,对车辆制动过程中各个状态变量进行估算和监测,基于建立的冗余ABS 控制策略确定该功能的介入和退出时机。制动主缸的压力控制采用变增益PID 控制,在冗余ABS 控制算法介入时,基于SMC(滑模控制)算法对车轮的滑移率进行控制,从而实现车辆冗余ABS控制功能,提升稳定性控制。
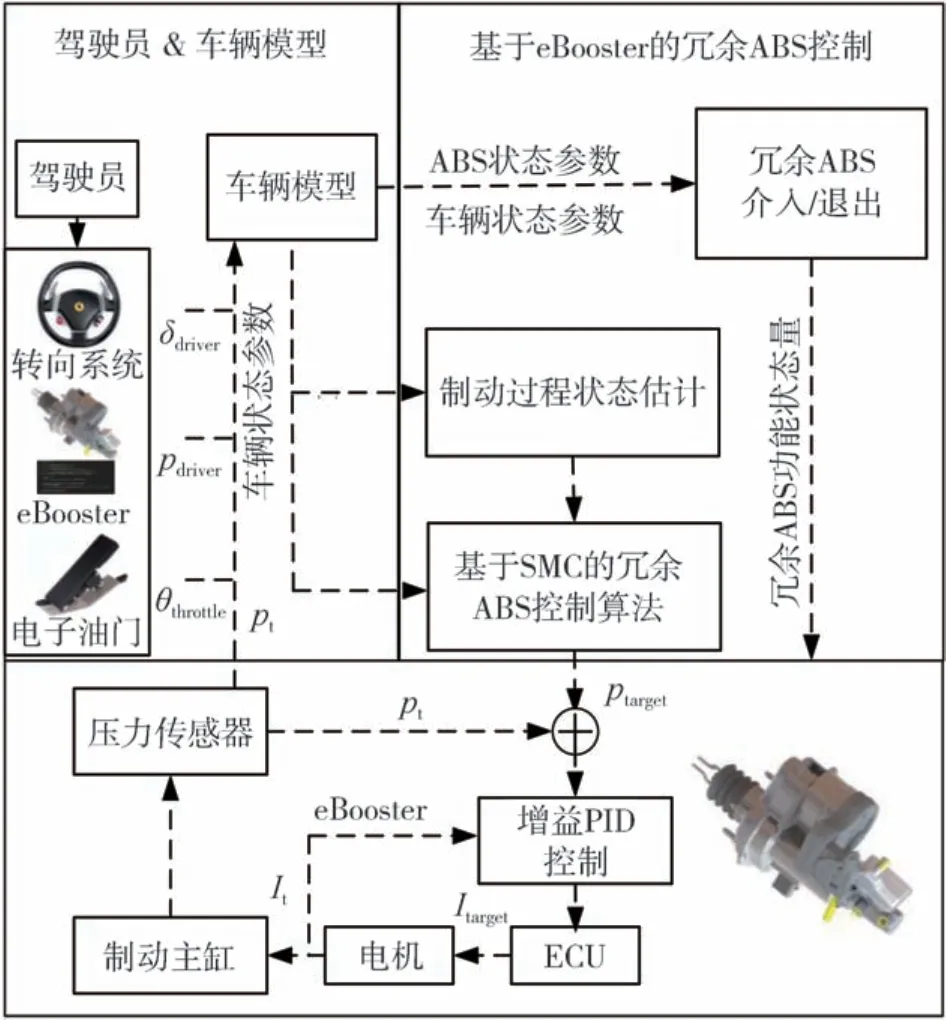
图7 冗余ABS控制系统架构
3.1 车速、轮速、滑移率计算模型
基于eBooster 的冗余ABS 模型选用逻辑门限控制,系统通过对车速、滑移率等输入信号的判断,如果判定满足下一个逻辑状态时,就跳转到下一个控制状态,否则就返回到上一个控制状态,使系统在加压、保压、建压3 个状态变化。在制动过程中尽量将滑移率控制在最佳滑移率附近。典型的轮胎纵向附着系数与滑移率之间的关系曲线见图8。
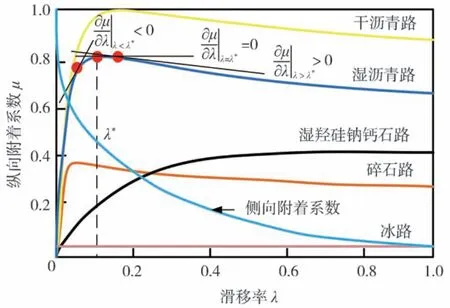
图8 纵向附着系数与滑移率关系
车辆行驶在不同的路面上,纵向附着系数会随着滑移率的变化而变化,大多数的-曲线都存在一个最优滑移率,使车辆的纵向附着系数最大,此时车辆可以获得纵向最大的制动减速度,且可以保证车轮不抱死。
基于单车轮车辆模型的讨论,假设车辆的纵向车速、单车轮受到的垂直载荷和轮胎受到的纵向力是可以准确得到的。地面附着系数和滑移率的计算公式为

通常情况下,车辆的侧向附着系数会随着滑移率的增大而减小,为保证车辆的稳定性,滑移率会控制在15%~20%。出于以上考虑,假设各路面下的最优滑移率如表1所示。
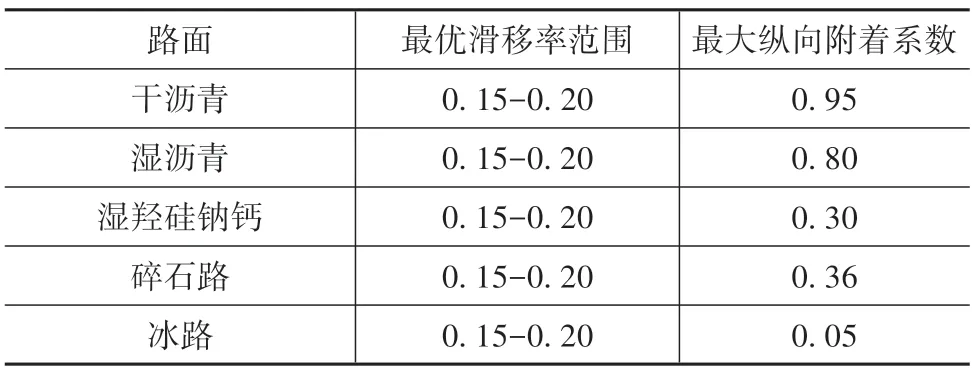
表1 最优滑移率
基于滑模变结构控制算法,对车辆防抱制动总泵压力控制进行研究。
滑模控制的状态变量为


滑模控制的切换函数可以用下式表达:

根据连续函数和等速趋近相结合的滑模控制方式,切换函数的导数为

式中:为等速趋近参数;为连续函数tanh 的饱和区间参数。

将液压系统变换为1阶惯性模型:

制动总泵在时刻的压力控制量为

3.2 主缸压力控制
主缸压力的控制方法如图9和图10所示。以目标液压力为调度对象的控制系统,液压力实际控制效果不仅与系统输入的最大目标压力相关,且与目标压力的控制频率有关。本文根据驾驶员常规制动、紧急制动、点制动、往复制动等工况进行高低频划分。将目标制动压力和目标压力的控制频率作为系统的增益调度模块。
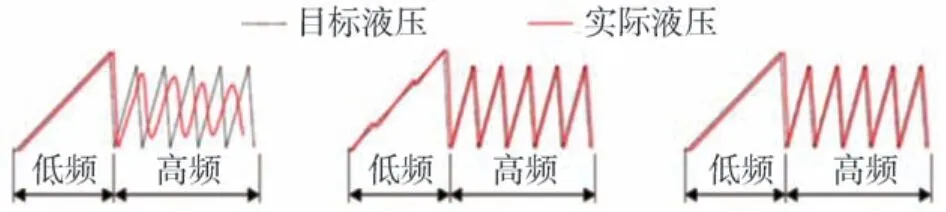
图9 控制模式增益调度示意图
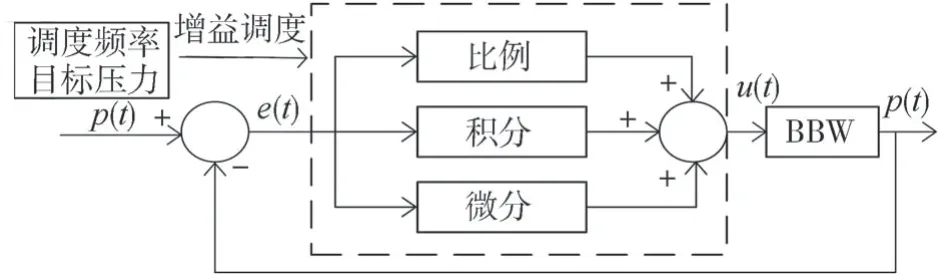
图10 增益PID控制算法框图
根据目标压力的不同,从小到大设计一系列的目标压力值、、、…、p,对应局部控制参数为(,,)、(,,)、…、(,,)。
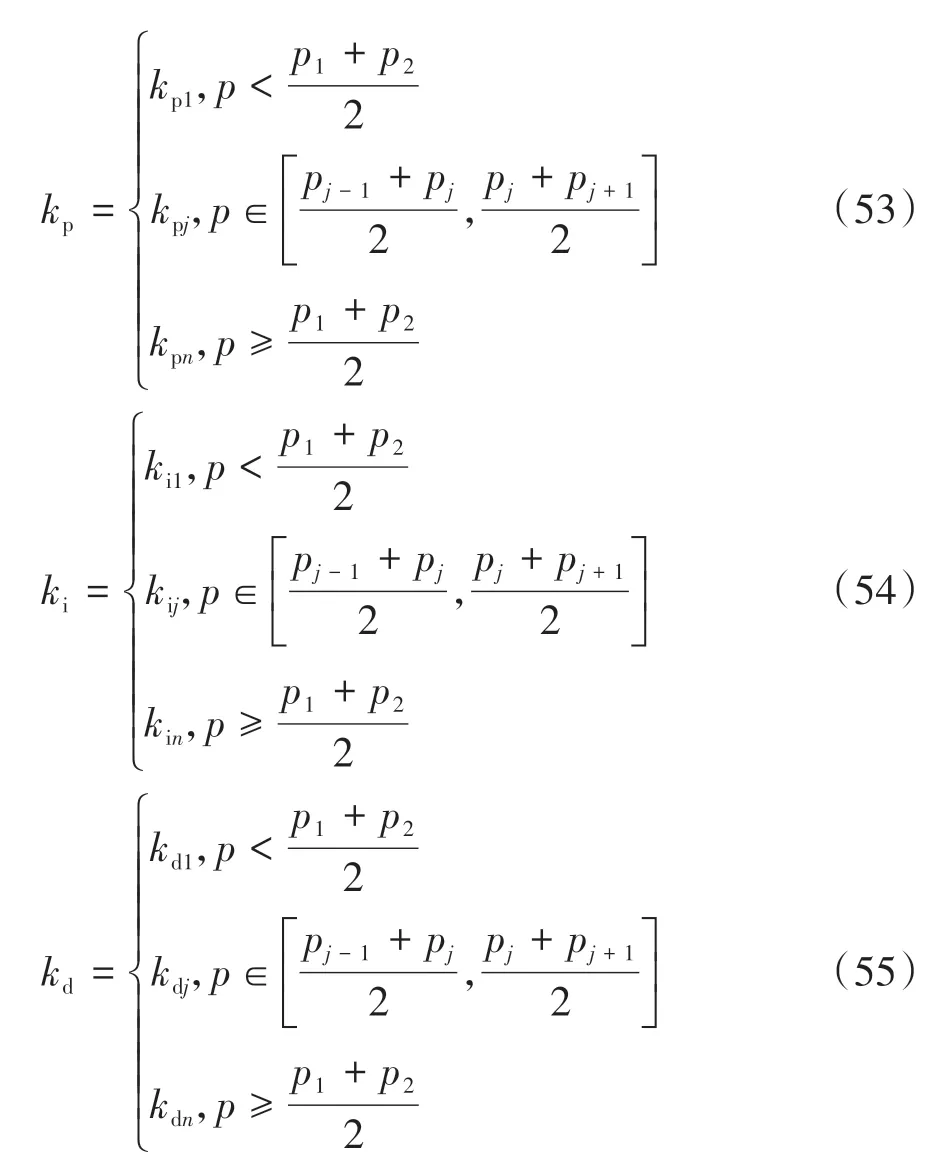
高频控制和低频控制也会对系统的压力控制产生影响,需要将两种控制模式的参数区别开来。(,)、(,)、(,)分别为低频和高频模式下不同压力段的局部控制参数。
式(56)~式(58)中低频控制模式为常规制动,高频控制模式为ABS 控制(相应频率的点制动也被识别为高频控制模式),实际控制频率(高频和低频的界定)按照设计的系列目标压力值、、、…、p的重复调用周期进行计算和设定,以控制模式为系统调度变量。
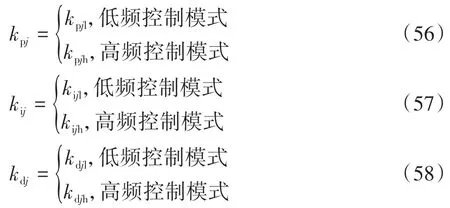
基于eBooster 的压力控制(试验用制动主缸缸径为25.4 mm)如图11 和图12 所示。从图中可以看出,所研发的eBooster执行器与控制算法可以实现以下性能:0-10 MPa阶跃响应时间为160 ms、0.1 MPa液压制动力的控制精度,可以实现制动主缸液压力快速、精准的控制。无论从建压时间还是控制精度,都可以满足ABS 功能实现的液压力控制性能需求。
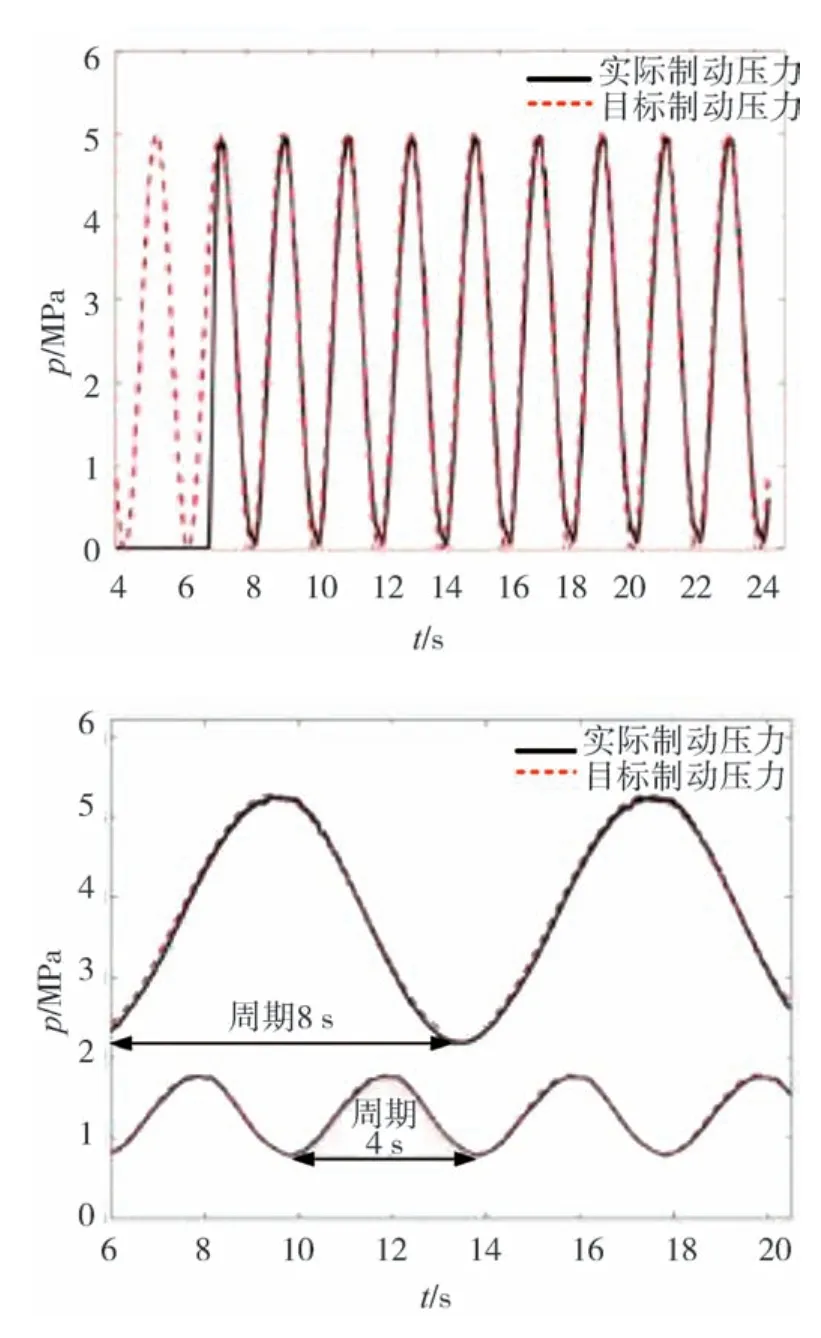
图11 正弦压力控制效果
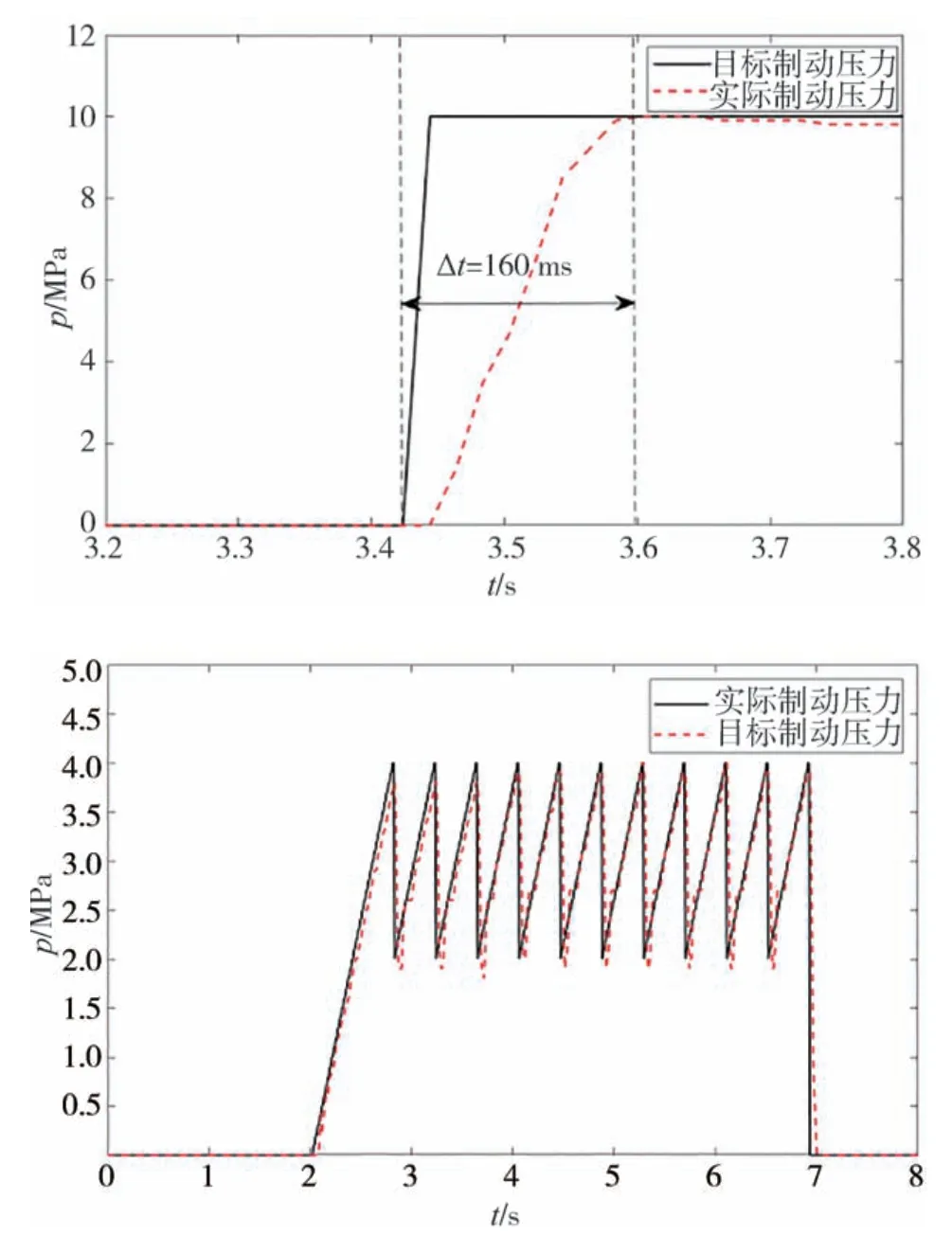
图12 阶跃和斜坡压力控制效果
3.3 冗余ABS介入退出机制
当制动踏板开度大于0、车速大于5 km/h、原车ABS系统故障,基于eBooster的冗余ABS控制算法启动。车速小于5 km/h、原车ABS 系统恢复正常工作时,冗余ABS 控制算法退出。基于eBooster 的冗余ABS 控制算法作为失效备份系统,应首先考虑车辆安全性,其次最大程度地提高系统制动强度。因此本文使用“后轮低选、四轮监测”的控制策略。表2为冗余ABS控制算法的控制策略。
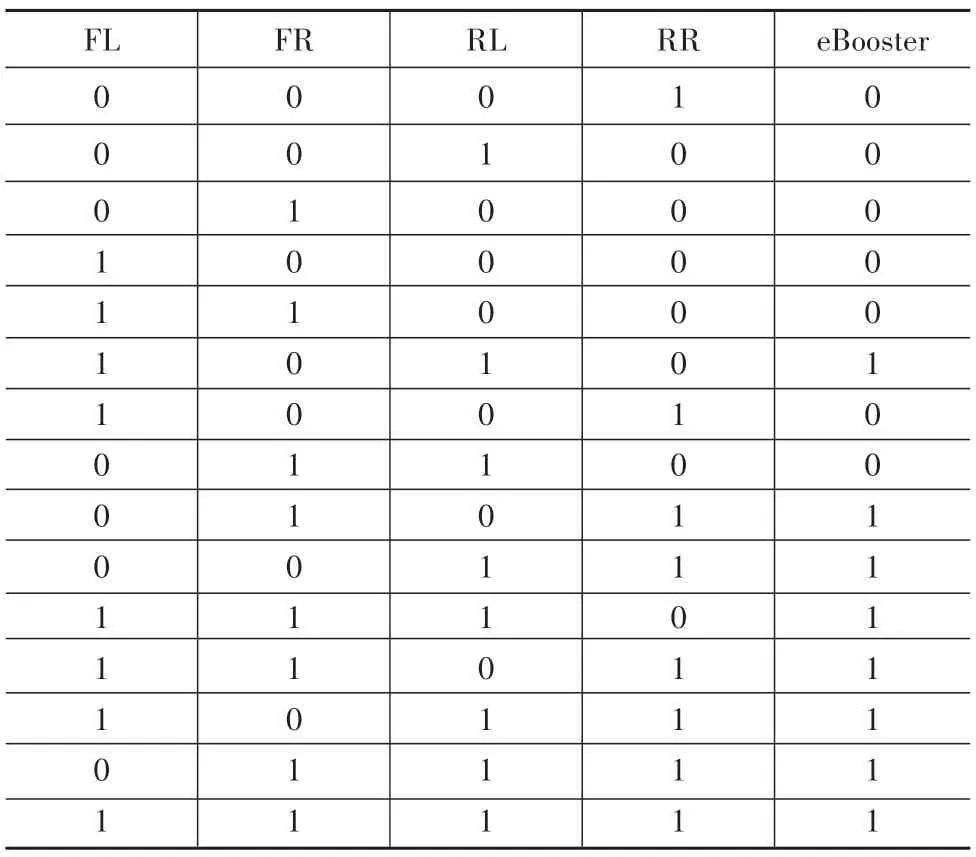
表2 冗余ABS控制策略
4 实车试验与分析
4.1 实车试验
选取黑龙江省五大连池市红河谷ABS试验场进行基于eBooster 的冗余ABS 控制算法验证。该试验场地有专业的ABS测试道路,分高附着系数、低附着系数、对开、对接等道路。试验人员与试验车辆如图13所示。

图13 试验人员与场地
试验车辆为长城哈佛HAVAL(H6)2019 款,车身尺寸4649 mm×1852 mm×1710 mm、整备质量1 592 kg。为保证试验安全性和一致性,将试验车改装为全线控底盘车,包括电子助力器线控制动系统、线控油门装置、线控转向系统。同时装有制动主缸和轮缸的压力传感器,数据采集设备以及视频采集设备。试验车见图14,试验结果见图15。
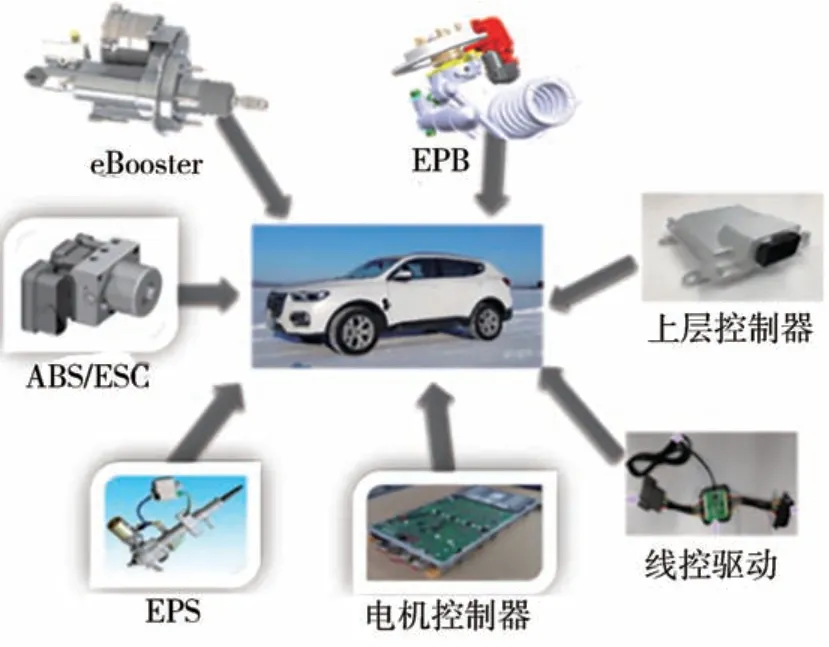
图14 线控底盘试验车
从图15 可以看出:在低附着系数路面上,制动压力控制稍大,车轮滑移率就会发生较大变化,在实现冗余ABS控制时需要较小的增减压梯度。从低附着系数路面跃变到高附着路面时,初始制动压力较低,车轮不会发生抱死,滑移率处于减小的状态,但车辆完全进入高附着系数路面后,应当提高系统的增压梯度,使从高附着系数到低附着系数路面跃变时,制动压力无法完成从高到低的阶跃变化,在路面跃变瞬间,车轮滑移率会迅速增加,这时的系统控制难度增加,波动幅度和频率也变大,是较危险的工况,此时应尽快完成高附到低附减压梯度的调整。在对开路面上,基于4 个车轮最多只允许一个前轮抱死的基础上,为尽可能增大制动强度、减小制动距离,可以适当增大控制系统的增减压梯度。综上可以看出,所提出的基于eBooster 的冗余ABS 控制算法,在原车ABS系统失效或发生故障时,可以很好地实现制动冗余防抱功能,在很大程度上提升车辆的安全性。
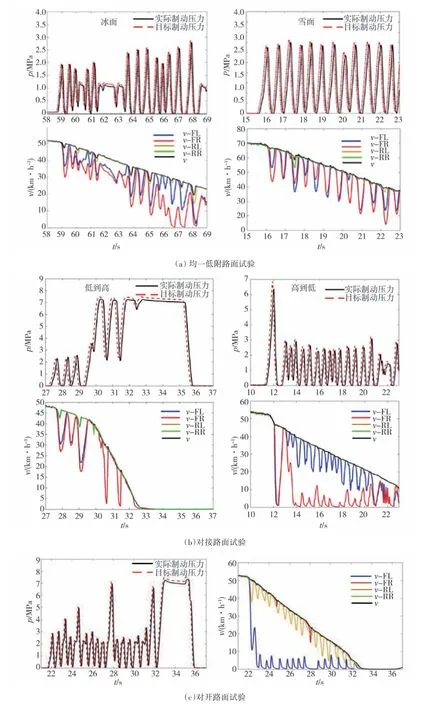
图15 实车试验结果
4.2 性能对比
利用控制变量法对比基于eBooster 的冗余ABS控制与原车ABS控制的效果。为尽量控制其他外在条件的一致性,将外在影响因素降到最低。利用线控油门给车辆加速确保制动时车速的一致性与准确性,用线控制动给车辆施加制动力,确保制动力的一致性,测试试验道路选用同一条,确保路面摩擦因数的一致性。驾驶员作为安全员随时准备控制车辆的转向、制动与加速,以确保在危险情况发生时进行人员干涉。
低附路面制动距离对比试验结果如图16 所示。低附路面测试时,车辆保持直行,制动主缸压力3 MPa,车速分别为20、40、60 km/h 的情况下,原车ABS 控制实测制动距离为10.37、42.22、106.89 m,基于电子助力器eBooster 冗余ABS 控制的制动距离为10.55、43.90、109.25 m。对比以上数据可以发现,从制动距离来看,本文所提出的控制算法可以很好地实现稳定性控制和制动距离保持。
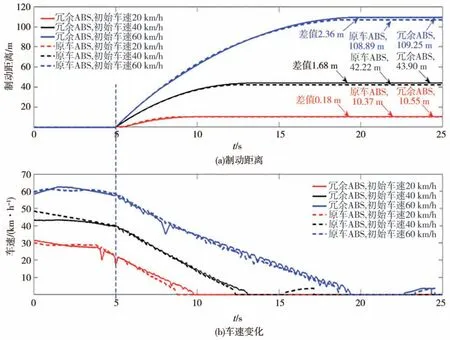
图16 低附冗余ABS与原车ABS制动距离对比
对开路面横摆角速度极值性能对比试验结果如图17 所示。车辆在对开路面进行测试时,车速在40 km/h 施加制动至车辆停止,制动主缸压力为2、6 MPa,原车ABS控制实测横摆角速度极值波动幅值分别为2.47、5.23(°)/s。基于eBooster 的冗余ABS控制实测横摆角速度极值波动幅值分别为3.78、7.85(°)/s。对比以上数据可以发现,从制动横摆角速度极值波动幅值来看,基于eBooster 电子助力器制动主缸压力调整的冗余ABS 控制算法在制动舒适性上会有所下降,横摆角速度极值波动幅值较大。
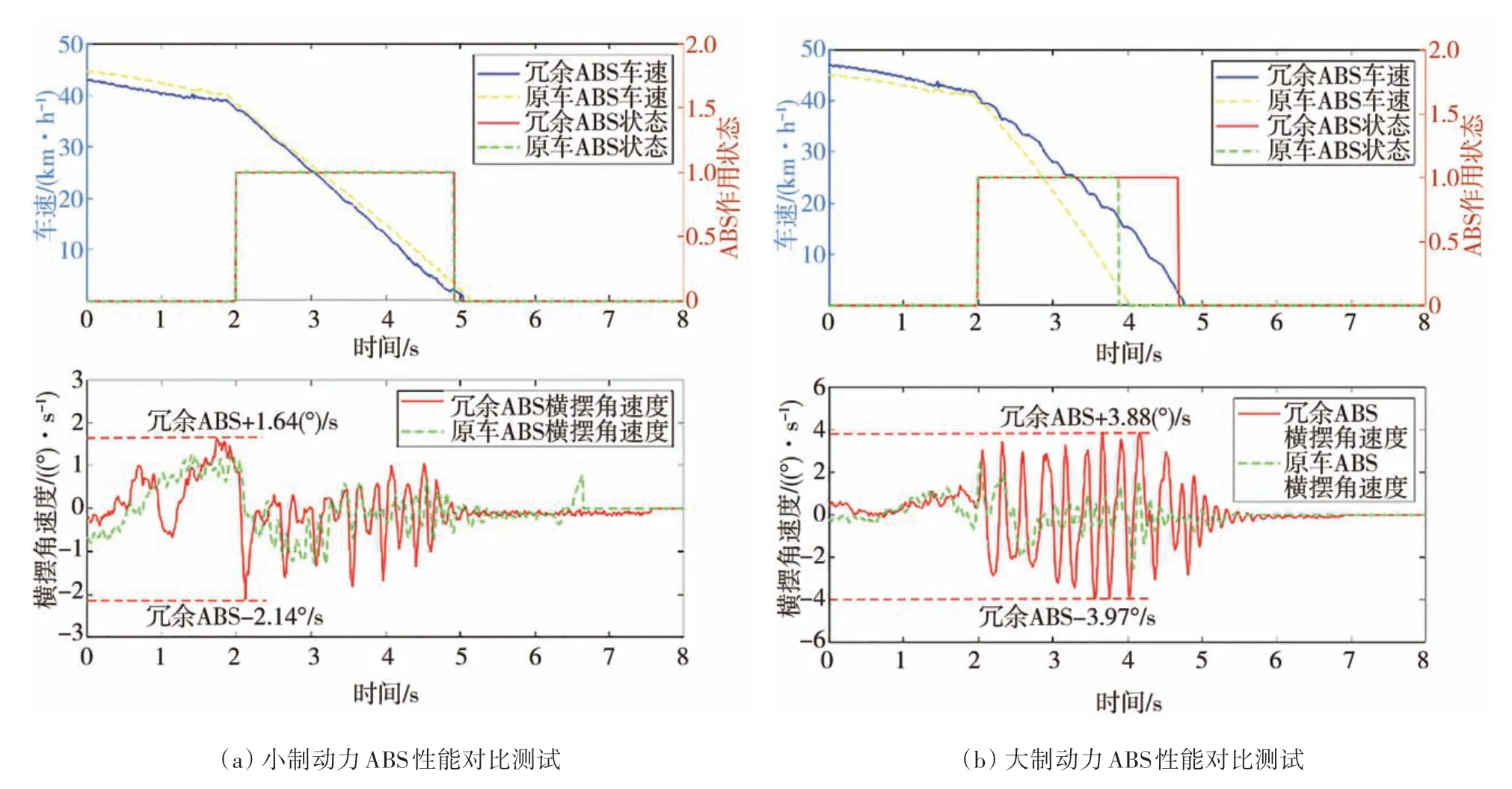
图17 对开路面冗余ABS与原车ABS舒适性对比
5 结论
通过半解耦电子助力器可以实现对制动主缸液压力快速、精准的控制,所提出的“基于电子助力器的冗余ABS控制算法”能够在综合考虑制动安全、制动距离、制动舒适性的基础上,很好地实现冗余ABS功能,提高车辆行驶安全性,主要结论如下。
(1)自主研发了一种半解耦式电子助力器,基于变增益PID 控制算法实现对该电子助力器制动主缸液压力的精准控制。
(2)针对传统ABS功能失效的情况,通过对车辆制动过程中各状态变量的估算和监测,构建冗余ABS控制算法的介入和退出策略。
(3)基于滑模控制算法,对车轮的滑移率进行控制,利用电子助力器对制动主缸液压力的调整,实现冗余ABS功能。
(4)通过均一低附路面、对开路面、对接路面的实车测试,验证了该冗余ABS 控制算法及策略的有效性。
猜你喜欢
汽车实用技术(2022年12期)2022-07-05 11:23:56
新技术新工艺(2022年1期)2022-03-04 12:49:46
科技与创新(2018年12期)2018-11-29 22:15:29
设备管理与维修(2018年15期)2018-11-08 06:14:50
设备管理与维修(2018年8期)2018-08-13 12:09:14
制造技术与机床(2017年6期)2018-01-19 02:41:07
中国核电(2017年1期)2017-05-17 06:10:00
西北工业大学学报(2015年3期)2015-12-14 13:08:46
电源技术(2015年9期)2015-06-05 09:36:06
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:54