基于卷积神经网络的逆变器故障诊断方法*
2022-02-18 01:44:28邓钧君王震坡孙逢春
汽车工程 2022年1期
于 海,邓钧君,王震坡,孙逢春
(1.北京理工大学,电动车辆国家工程实验室,北京 100081;2.北京电动车辆协同创新中心,北京 100081)
前言
车用永磁同步电机(permanent magnet synchronous motor,PMSM)驱动系统在长期运行过程中受工作环境及自身老化等因素影响,存在故障风险。未被系统检测到的故障会使电机保持异常运行,严重时威胁驾驶员的人身安全。因此,有必要开展快速有效的PMSM 驱动系统故障诊断研究,对电机驱动系统的健康管理具有重要意义。
在PMSM 驱动系统中,逆变器是故障率较高的部件。本文中研究的故障情况包括半导体功率开关管开路故障、电流传感器信号丢失故障、相电路开路故障等。目前,PMSM 驱动系统故障诊断方法的研究主要分为3 类:基于模型的故障诊断方法、基于信号的故障诊断方法和基于知识学习的故障诊断方法。基于模型的故障诊断方法对系统运行工况变动具有较好的适应能力。但该类方法需要高质量的传感器信号和精确的电机模型参数。基于信号的故障诊断方法运用不同的信号处理方法,对待诊断系统的电流、电压、振动、温度等信号数据进行特征提取,分析信号特征与故障信息之间的关联,从而实现故障的检测。传感器安装及信号测量是该类故障诊断方法研究的基础。傅里叶变换、小波变换等信号分析方法中采集数据时长超过一个电周期,存在信息冗余。基于知识学习的故障诊断方法不需要对电机驱动系统工作原理及故障机理进行详细分析,能够充分发挥知识学习方法的优势,但该方法需要大量的学习样本。
随着物联网、云计算、大数据等技术的发展,以深度学习等为代表的知识学习方法,被快速应用到各大领域。如深度学习已经在语音识别和图像识别等领域中得到普及,但在PMSM 驱动系统故障诊断领域中的应用仍处于发展阶段。文献[12]~文献[14]基于振动信号运用深度神经网络实现了感应电机故障诊断。文献[15]中将振动信号数据转化为二维灰度图,采用卷积神经网络(convolutional neural network,CNN)提取故障特征实现了轴承故障诊断。文献[16]中基于噪声和振动信号联合CNN实现了大型电机故障诊断。这些故障诊断方法主要针对电机系统中振动信号和噪声信号,这两类信号在道路车辆工况下不易采集,因此难以在车用PMSM 驱动系统中应用。文献[17]中基于负序电流和转矩样本数据,采用深度学习方法实现了电机匝间短路故障诊断。文献[18]中将空间金字塔池化和CNN 相结合实现了电机故障诊断。然而,这些方法的诊断效果在电机变转速工况下受影响。
基于以上分析,为了进一步研究深度学习在车用PMSM驱动系统故障诊断领域中的应用,本文中提出了一种基于卷积神经网络的逆变器故障诊断方法。
1 定子电流特征与系统典型工况
1.1 PMSM 定子电流特征
在PMSM 驱动系统运行过程中,故障发生的时刻具有不确定性。按故障发生时刻前后,分为正常运行、过渡过程、故障停机或故障运行3 个状态,本文针对故障发生后系统仍保持运行的情况,开展故障诊断研究。在故障过渡过程中,非稳态的三相定子电流信号难以提取稳定的故障特征,不利于故障诊断方法的研究。电机带故障进入稳定运行状态后,电流信号所包含的故障信息具有相对稳定的特征,可以用于电机驱动系统故障诊断。同时,电机驱动系统在运行状态下,电流信号呈现周期性变化,稳态时一个电周期的电流信号包含了故障特征信息。
在逆变器正常情况下PMSM 三相定子的电流波形为正弦波;当半导体功率开关管开路发生故障时,某一相定子电流在1/2电周期内近似为零;当相电路开路故障或电流传感器信号丢失时,某一相测得电流数据为零,但三相定子电流的和不相同。可见,在不同故障情况下,三相定子电流包含的故障信息不同,基于故障现象分析相应的电流特征,是开展故障诊断方法研究的关键。
1.2 车用电机驱动系统典型工况
通常,车用PMSM 驱动系统的工作范围如图1所示,包括恒转矩速度范围和恒功率速度范围,系统可以在工作范围内任意工作点运行。
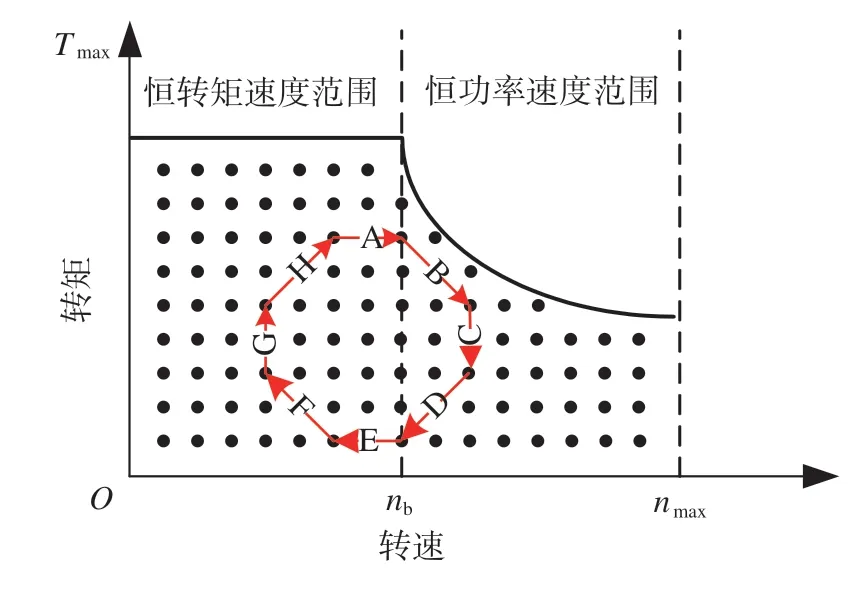
图1 永磁同步电机驱动系统的工作范围
为了方便开展基于CNN 的逆变器故障诊断方法的研究,可以选取电机驱动系统中部分代表性工作点开展故障注入实验,以获取用于CNN 训练的样本数据。比如,在转矩、转速允许范围内等间隔选取工作点。选取的工作点越多,获得的训练样本数据量越大。
车用PMSM 驱动系统在实际工况中需要频繁改变转矩和转速,过渡工况如图1中的A-H 所示,对应电动汽车的加速、等速和减速等不同行驶工况。本文重点针对图1 所示的典型工况开展故障注入仿真实验,获取CNN 的测试样本数据,同时考虑实际应用中测试样本数据的噪声干扰问题。
2 故障诊断方法
本文提出的逆变器故障诊断框图如图2所示。
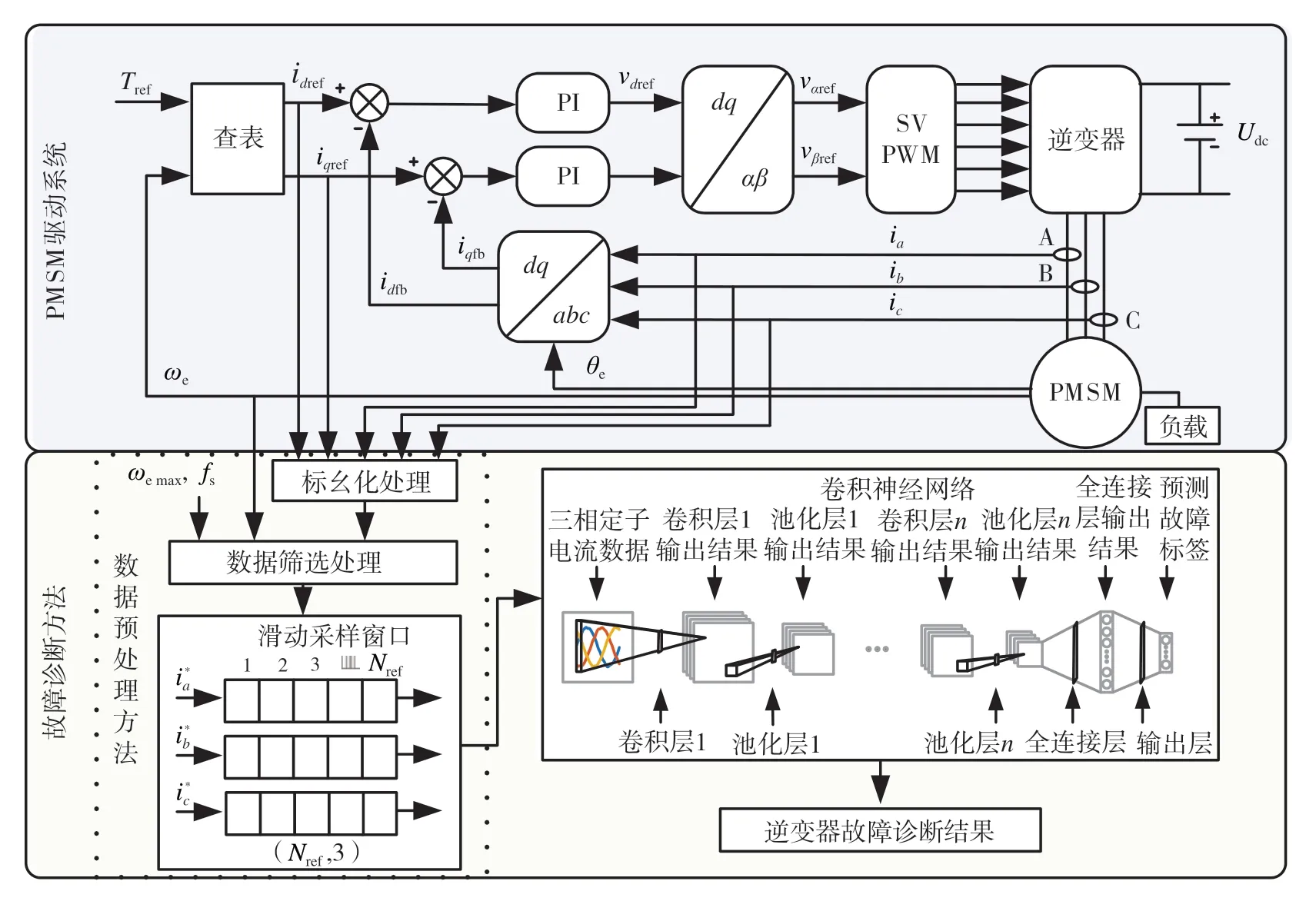
图2 逆变器故障诊断框图
2.1 数据预处理方法
当车用PMSM 驱动系统运行在转矩、转速变化的工况时三相定子电流幅值不断发生变化。为了方便CNN 开展故障诊断,减少转矩变化对故障诊断效果的影响,针对变转矩工况对三相定子电流进行标幺化处理。
在永磁同步电机驱动系统控制策略下,电流传感器每个采样周期对应的电流环中给定的轴参考电流变换为坐标系中三相参考电流,如下式:

式中:i和i为电流环中给定的轴参考电流;i、i和i为等幅值变换后坐标系中三相参考电流;为当前电角度。
三相参考电流的合成电流矢量的幅值为

正常情况下,每个采样周期中三相参考电流近似等于PMSM 三相定子电流。基于合成电流矢量的幅值,对PMSM 三相定子电流进行标幺化处理,结果可以表示为

式中i为对应i和i的同一采样周期中PMSM三相定子电流。


首先,电机工作于最高转速时,单个电周期内的电流采样数据量最小,此时定子电流频率为

式中为电机最大电角速度。该条件下单个电周期的电流信号采样数据个数为

式中为电流信号采样频率。将设定为滑动采样窗口所对应数组的标准长度。
另外,在最大转速下工作时,一个采样周期对应的电角度为

在滑动采样窗口内,将Δ设定为相邻两个采样数据的标准电角度间隔,即系统达到稳态后,仅满足该电角度间隔的采样数据才符合筛选条件。对于任意采样时刻,一个采样周期对应的电角度Δ为


通过上述数据筛选处理后,用于CNN 的三相定子电流数据可以约束在一个电周期内。
2.2 卷积神经网络
CNN 是一种具有深层结构的前馈神经网络,具有较强的自学习能力和较好的抗噪能力,可通过结合卷积核、数据降采样和权值共享,实现信号位移、缩放和扭曲的识别。通常情况下,CNN包括输入层、卷积层、池化层、全连接层和输出层。
在不同故障情况下,三相定子电流数据包含不同故障特征信息。首先,定子相电流是时域信号,在不同相位角所包含的相电流局部故障特征是不同的;其次,受电机控制策略的影响,三相定子电流数据之间存在耦合关系,在不同相位角的三相定子电流局部故障特征也各不相同。另外,各个局部故障特征之间存在相位关系。因此,输入数据(,3)进入CNN 后,可以与卷积层进行卷积运算,提取故障特征。在定子电流数据稀疏处理后故障信息不变的前提下,通过池化层可以降低卷积层输出的特征数据尺寸,减少网络中参数变量。
3 结果分析
3.1 故障注入仿真分析
本文中采用MATLAB/Simulink 提供的车用PMSM 驱动系统模型开展故障注入仿真实验,获取用于故障诊断研究的数据。车用PMSM 驱动系统控制逻辑框图如图2 所示,模型参数如表1 所示,工作范围如图3 所示。选取转矩间隔为10 N·m,转速间隔为100 r/min,总计331 个工作点。开展故障注入仿真实验,获取训练样本数据,共326 768组,故障情况如表2 所示。参照图1 中某工作状态A-H 开展故障注入仿真实验获取测试样本数据,具体如图4 所示,共5 382组。

表2 故障情况表
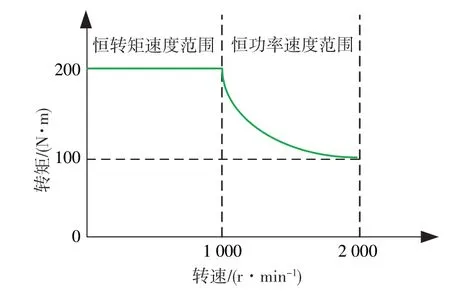
图3 35 kW IPMSM工作范围
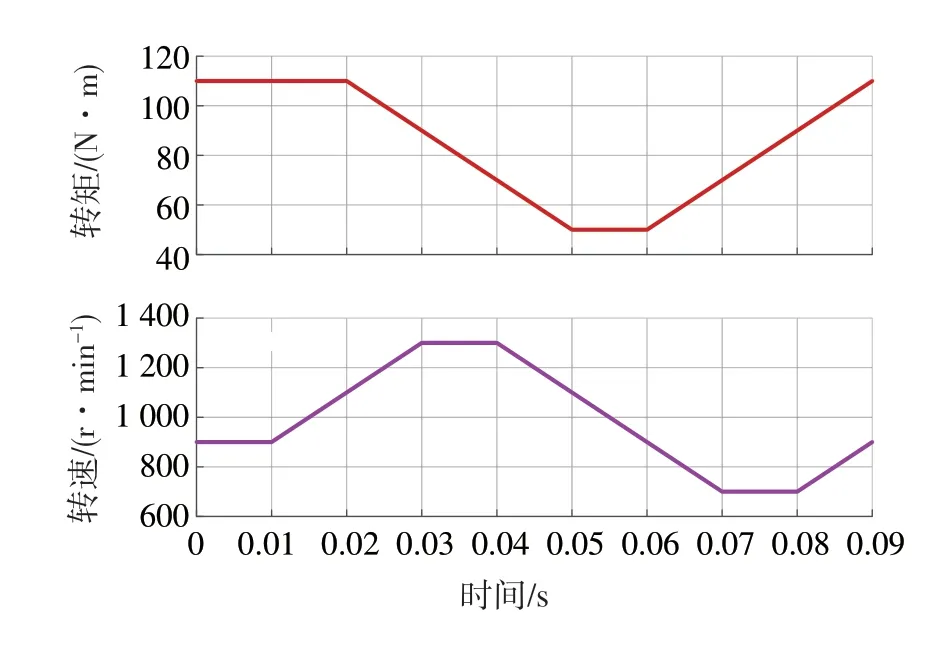
图4 电机驱动系统变转矩、变转速工况
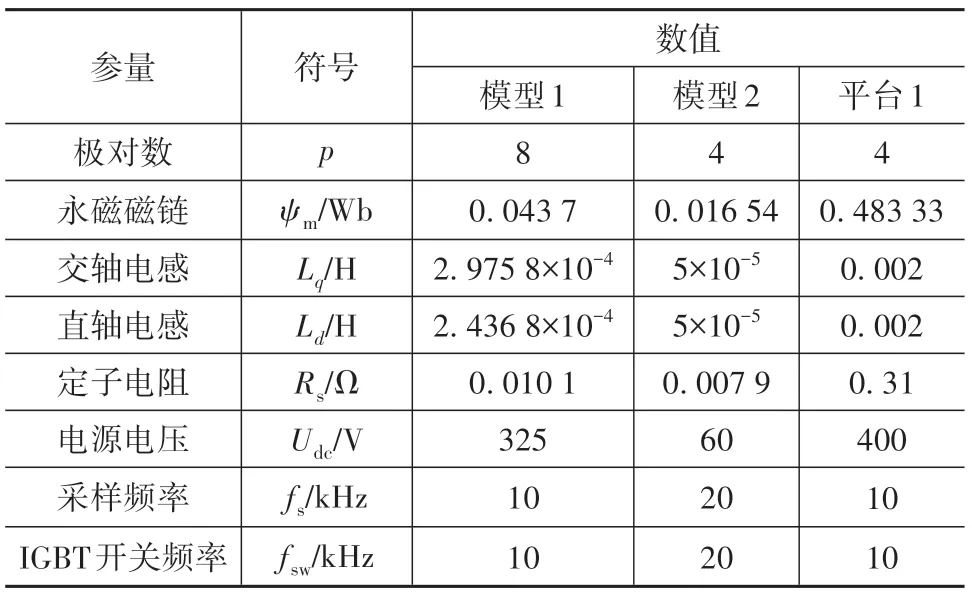
表1 永磁同步电机驱动系统模型参数
为了方便开展故障诊断研究,本文选取两个工作点(50 N·m,2 000 r/min)和(100 N·m,1 000 r/min)进行故障数据分析。假定PMSM 永磁体的极对数=8,电流传感器信号采样频率=10 kHz,并以2 000 r/min 为电机最高转速点,一个电周期内单相电流数据量≈38,即滑动采样窗口的宽度为38。不同故障情况下,三相定子电流数据处理后的结果对比如图5所示。

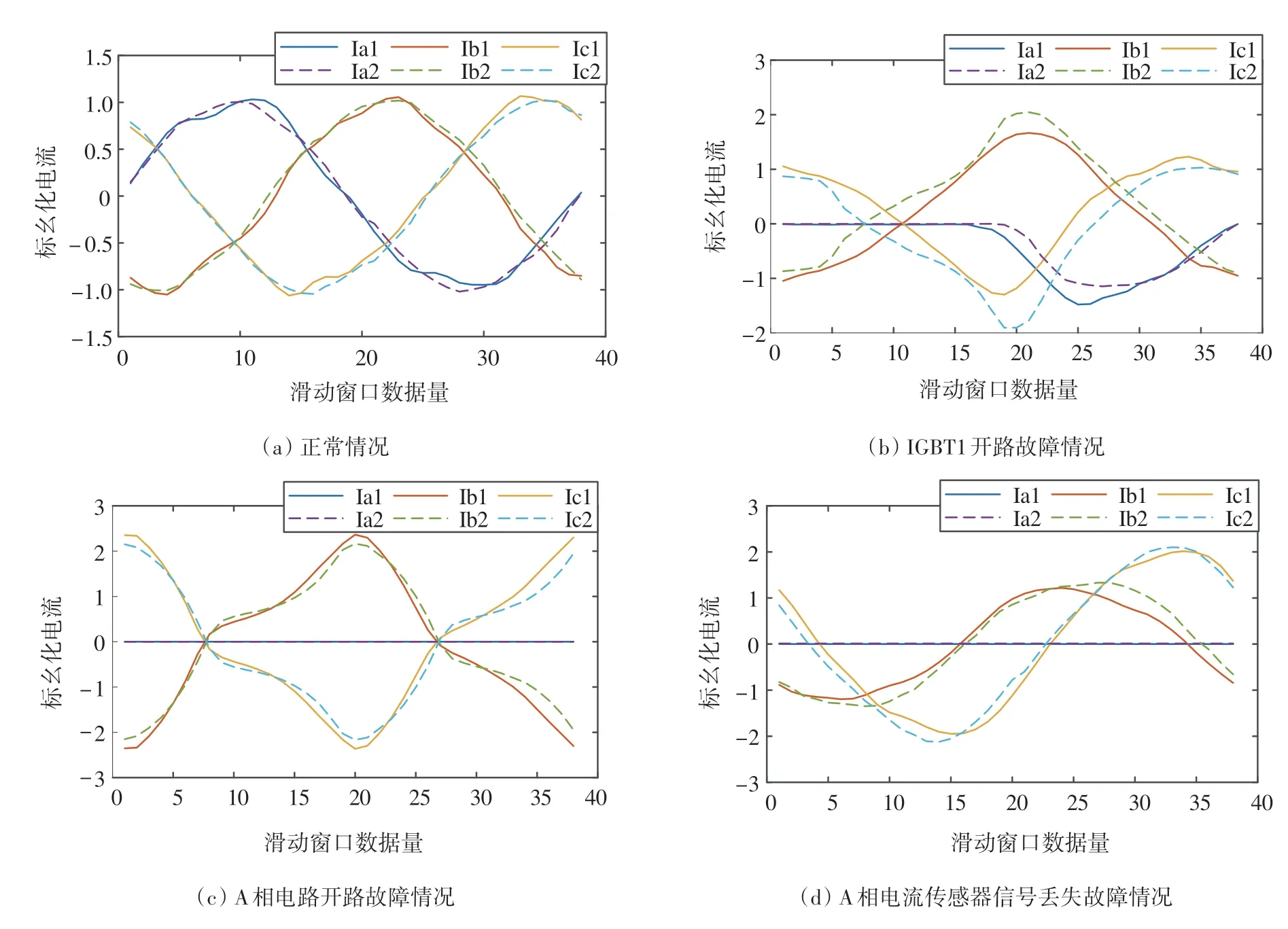
图5 不同工作点下的三相定子电流数据处理后结果对比

图6 不同电角度起始位置的三相定子电流数据处理后结果对比
3.2 故障诊断方法仿真验证
CNN 模型设计具有一定的灵活性,卷积层的层数越多,卷积核的数量越多,所能提取的故障特征越明显,有助于提高故障分类准确度。本文采用“卷积层-池化层-卷积层-池化层-卷积层-池化层-全局均值池化层-全连接层-输出层”的结构模型。三相定子电流之间存在耦合关系,所以输入数据矩阵维数为(,3)。3层卷积层的卷积核数量分别为100、100、100,大小分别为3、3、3,步长为1,激活函数为ReLU 函数;每个卷积层后统一链接最大池化层,其大小为2;全连接层采用Dropout 技术以防止出现过拟合;输出层采用Softmax分类器。在CNN模型迭代50 轮后识别准确率达到0.997 9,如图7 所示。将测试样本数据作为CNN 模型输入,最后输出分类结果,其混淆矩阵如图8 所示,图中横坐标代表检测的故障标签,纵坐标代表真实的故障标签,数值代表CNN 模型分类结果。结果表明基于CNN 的故障诊断方法能够有效地实现逆变器各种故障分类。
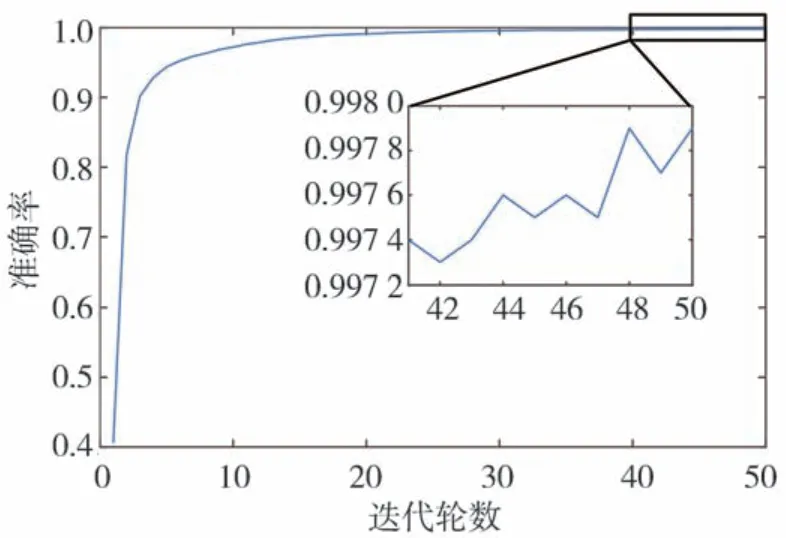
图7 卷积神经网络模型识别准确率
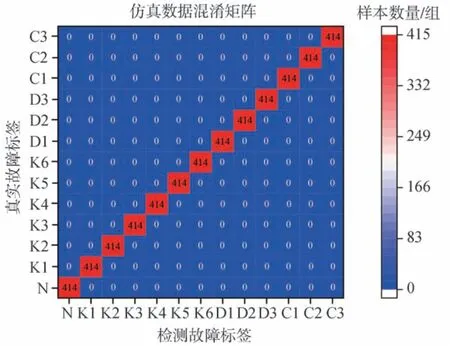
图8 逆变器故障分类的混淆矩阵
(1)噪声数据条件下故障诊断
为了验证CNN 的实用性,将信噪比SNR 为30、20和10 dB的测试样本数据输入CNN 模型中进行测试。信噪比为10 dB 时,某一组样本数据如图9 所示,图中Ia5、Ib5 和Ic5 是无噪声注入的电流数据,Ia6、Ib6 和Ic6 是叠加噪声后的数据。在3 种信噪比数据条件下,故障分类结果如图10 所示,故障分类准确率分别为100%、100%和98.37%。由图10 可知,测试样本数据在噪声注入后,基于CNN 的故障诊断方法的分类效果良好,表明基于CNN 的故障诊断方法具有良好的抗噪能力,验证了该故障诊断方法用于逆变器故障诊断的鲁棒性。基于CNN的故障诊断方法与基于支持向量机的故障诊断方法的故障分类准确率对比如表3所示。基于CNN 的故障诊断方法的抗噪能力要强于基于支持向量机的故障诊断方法。
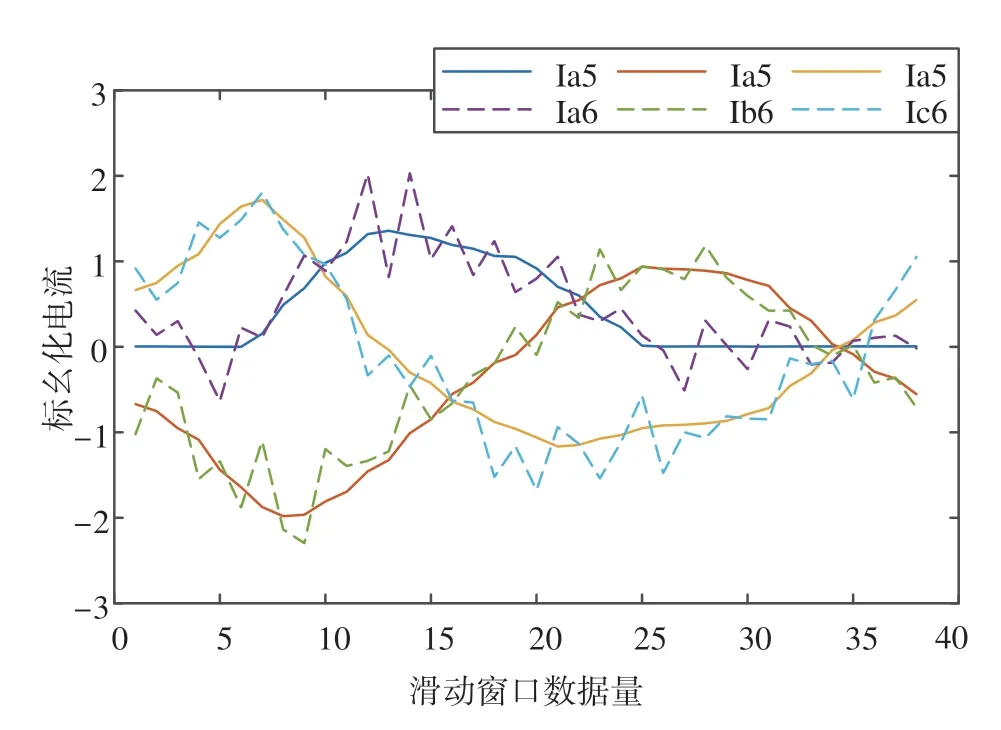
图9 噪声注入前后样本数据
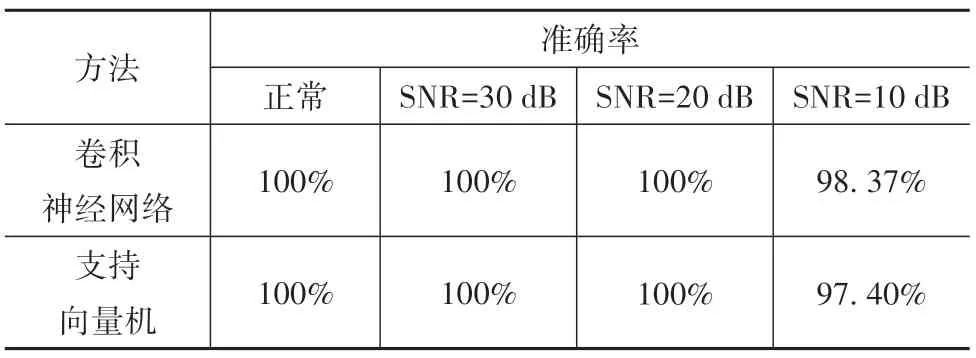
表3 故障分类准确率对比
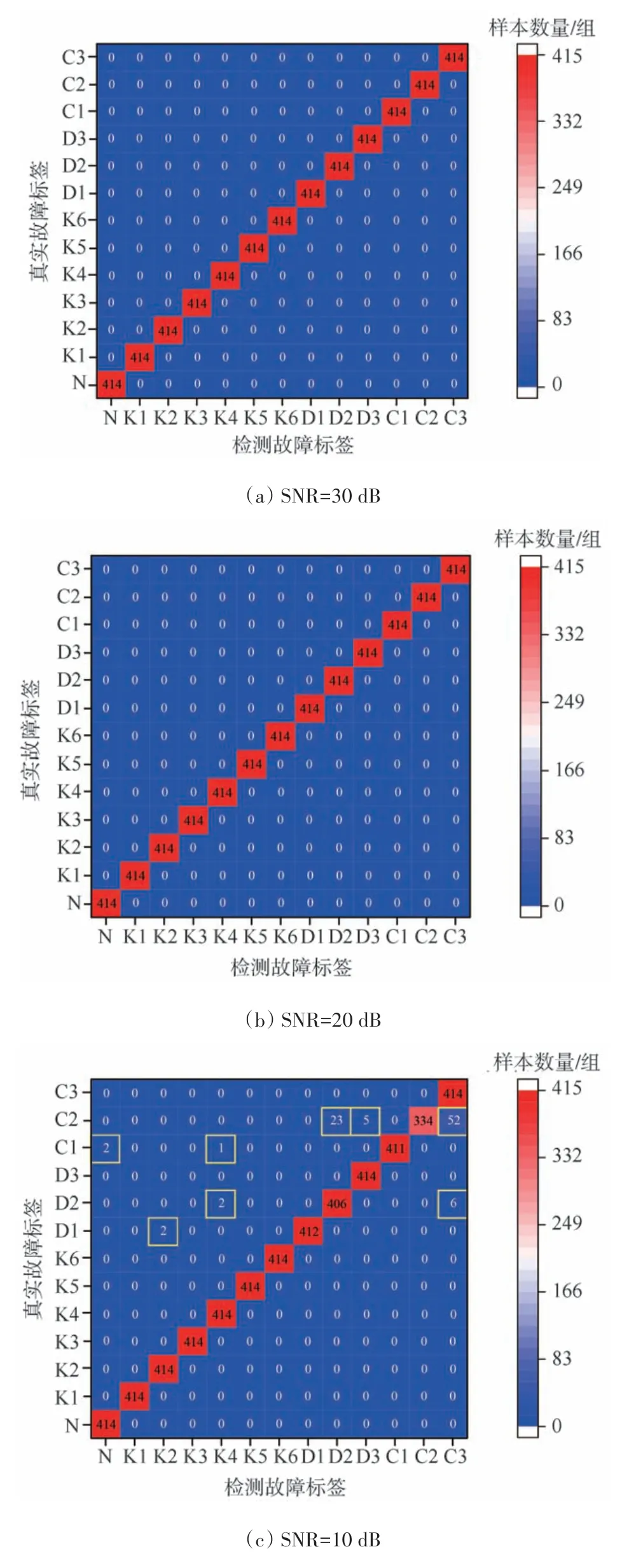
图10 逆变器故障分类的混淆矩阵
(2)稀疏数据条件下故障诊断
在实际应用中,为了节约数据储存空间、减少数据传输量,有必要对所采集的状态数据进行稀疏化处理。类似于图像识别中图片数据的稀疏化处理,在一个电周期内三相定子电流数据稀疏时,应用CNN 对逆变器进行故障诊断分析。设置池化层为3 层,卷积核大小为3,滑动采样窗口的宽度取10,即单个电周期定子电流采样数据为10 个。由故障注入仿真实验,获取训练样本数据86 307 组,测试样本数据1 430 组。基于上述数据集训练的CNN 故障诊断模型,故障分类准确率分别为100%(正常)、100%(SNR=30 dB)、100%(SNR=20 dB)和99.44%(SNR=10 dB),表明基于CNN 的故障诊断方法在数据稀疏化情况下,依然可以取得良好的故障分类效果。
(3)=3条件下故障诊断
根据香农采样定律,一个电周期内3 个采样数据依然包含故障特征信息。由于采样数据较少,该情况影响了CNN 中池化层的应用,所以采用“卷积层-卷积层-全局均值池化层-全连接层-输出层”结构模型。卷积层的卷积核数量分别为300和300,大小分别为3 和3,步长为1,激活函数为ReLU 函数。获取训练样本数据为25 922 组,测试样本数据为442 组。在CNN 模型迭代100 轮后识别准确率达到0.987 0。故障分类准确率分别为100%(正常)、100%(SNR=30 dB)、100%(SNR=20 dB)和91.40%(SNR=10 dB)。当取值过小时,故障分类准确率受噪声影响变大。
由(2)、(3)分析可知,即使一个电周期内系统状态数据的采样量变少,通过CNN 模型依然能够有效地提取故障特征量,克服故障信号特征表征不足的问题,实现逆变器的故障诊断。同时注意到,在噪声干扰条件下,若输入数据过于稀疏,故障分类的准确率会受很大影响。
(4)故障工况数据集的稀疏化
在实际应用中,开展故障注入实验,选取工作点越多意味着工作量越大,减少故障注入实验工作量有助于提高数据驱动故障诊断方法的实用性。因此,该部分选取电机驱动系统工作范围边界线(如图3 中绿色曲线)附近工作点开展故障注入仿真实验,获取训练样本数据,选取工作点29 个,训练样本数据共27 859 组。测试样本数据与图8 中测试样本数据相同。在正常和噪声数据条件下,故障分类准确率分别为94.3%(正常)、94.18%(SNR=30 dB)、94.07%(SNR=20 dB)和95.56%(SNR=10 dB)。故障数据集稀疏化后,CNN 故障诊断研究效果仍能保持较高的准确率,为该方法的应用提供了参考。
(5)电机型号的影响
相同控制策略下的PMSM 驱动系统具有相似的动态特性。将不同型号电机驱动系统逆变器的故障数据用于CNN 模型训练,验证故障诊断方法的普适性。
除前文中所选取的电机驱动系统外,另外选取的PMSM 驱动系统的模型参数如表1 中模型2 所示。在两个电机驱动系统中开展故障注入仿真实验,获取训练样本数据共365 768 组,测试样本数据共24 882 组。在正常和噪声数据条件下,故障分类准确率分别为100%(正常)、100%(SNR=30 dB)、100%(SNR=20 dB)和96.87%(SNR=10 dB)。这一结果表明本文所提出的故障诊断方法具有较强的适用性,可以用于多型号电机驱动系统逆变器故障诊断,在多型号电机驱动系统远程监测中具有重要意义。
3.3 故障诊断方法实验验证
为了进一步验证故障诊断方法的有效性,采用南京研旭公司的实验平台进行实验,如图11 所示。PMSM 驱动系统的参数如表1 中平台1 所示。实验中滑动采样窗口的宽度为38。为了方便验证诊断方法,仅在(10 N·m,250 r/min)和(20 N·m,500 r/min)两个工作点采集训练样本数据共1 638组,在两个工作点间过渡状态采集测试样本数据共12 519组。部分电流数据处理后结果如图12 所示,基于实验数据的故障分类结果如图13 所示。实验结果表明,本文中提出的故障诊断方法能够有效地实现逆变器的各种故障诊断。
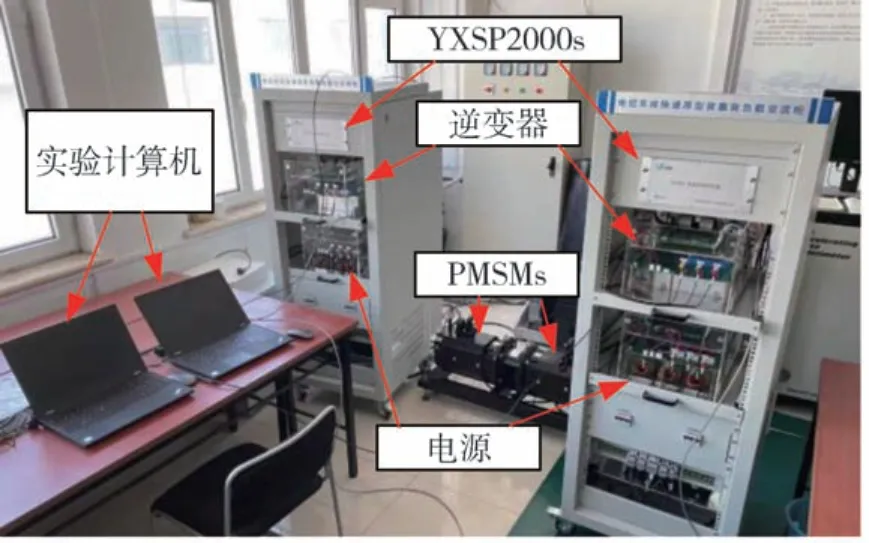
图11 实验平台
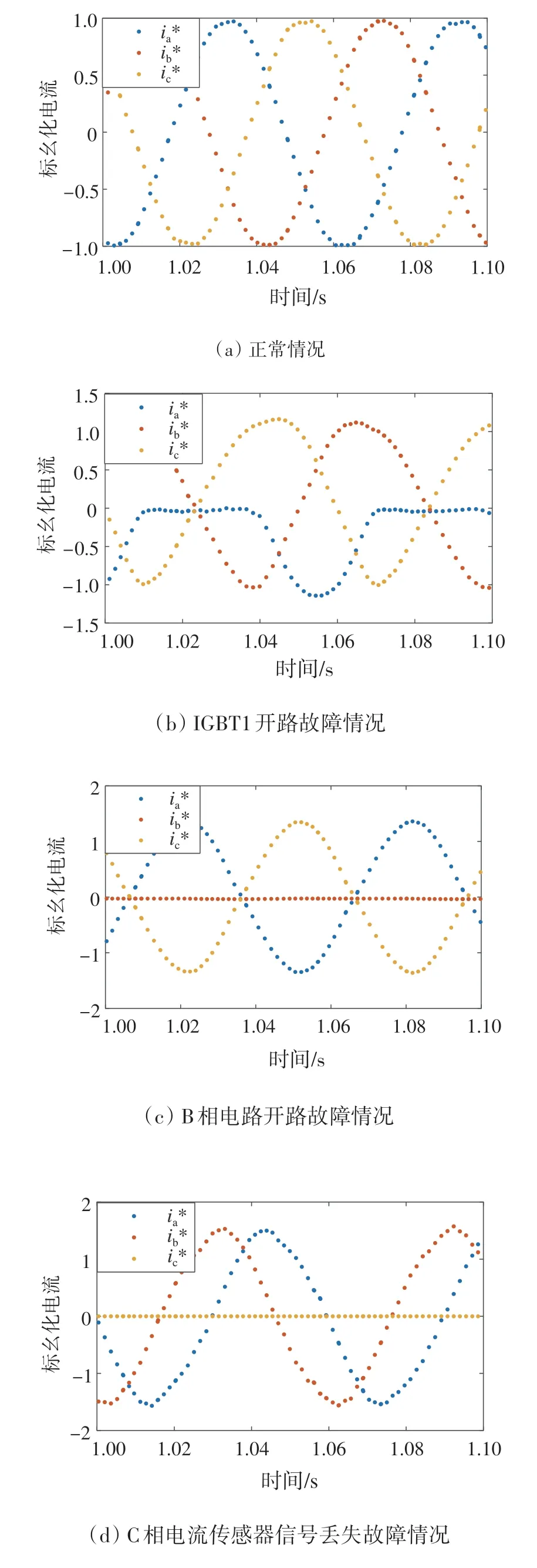
图12 工作点(10 N·m,250 r/min)下部分电流数据处理结果
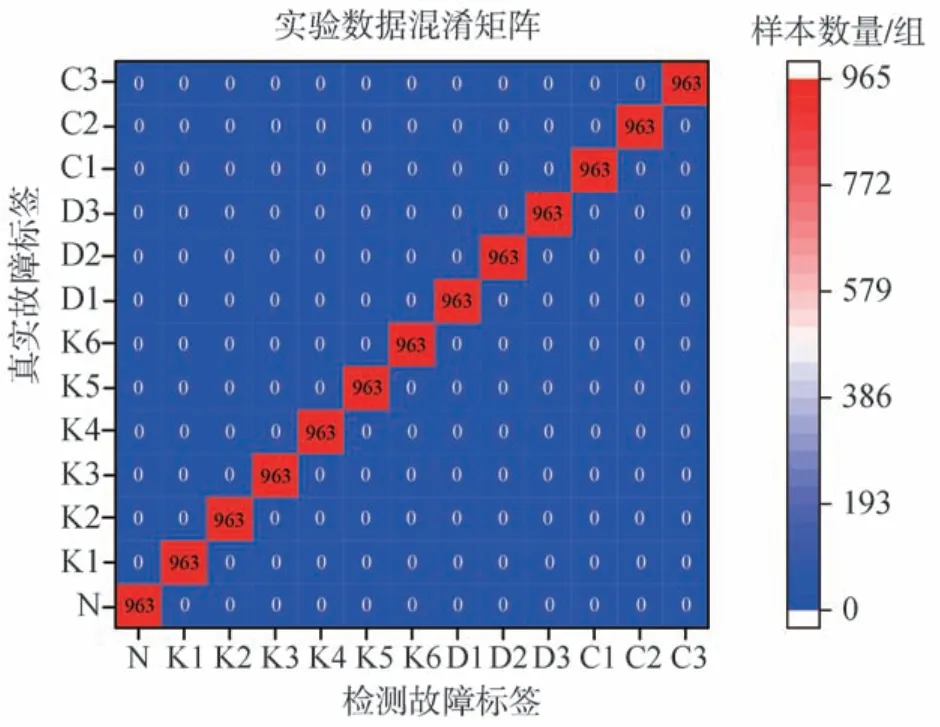
图13 逆变器故障分类的混淆矩阵
4 结论
本文中以车用PMSM 驱动系统的逆变器为研究对象,提出了一种基于卷积神经网络的故障诊断方法。该故障诊断方法通过对三相定子电流采样数据进行预处理,有效降低了系统复杂工况对数据表征故障特征的影响;采用CNN 实现了对逆变器功率管开路、电机相电路开路、电流传感器信号丢失等几种典型故障的特征提取和分类;搭建了PMSM 驱动系统仿真模型,探究了采样噪声、采样数据稀疏、训练样本数据集稀疏化、电机型号不同等情况下,所提出故障诊断方法的适用性。仿真结果验证了该故障诊断方法的鲁棒性,而实验结果验证了故障诊断方法的有效性。
猜你喜欢
防爆电机(2021年1期)2021-03-29 03:02:46
哈尔滨铁道科技(2020年4期)2020-07-22 02:22:28
测控技术(2018年2期)2018-12-09 09:00:52
重庆工商大学学报(自然科学版)(2015年10期)2015-12-28 07:43:58
电源技术(2015年12期)2015-08-21 08:58:44
电测与仪表(2015年12期)2015-04-09 11:44:44
电机与控制应用(2015年10期)2015-03-01 03:50:16
电测与仪表(2014年14期)2014-04-04 11:53:30
电力工程技术(2014年1期)2014-03-20 14:19:06
振动、测试与诊断(2014年5期)2014-03-01 01:14:21