
电网不平衡下模块化多电平变换器无源一致性控制方法
2022-02-17 09:40:40田广平扈曾辉王育飞杨兴武
电力系统自动化 2022年3期
薛 花,田广平,扈曾辉,王育飞,杨兴武
(1. 上海电力大学电气工程学院,上海市 200090;2. 国网山东省电力公司肥城市供电公司,山东省肥城市 271000)
0 引言
海上风力发电因其分布广、无污染、风力资源持续性好等特点受到越来越多的关注,应用日益广泛。 模块化多电平变换器(modular multilevel converter,MMC)具有谐波性能好、开关损耗低、模块化结构、低滤波需求等特点,在大规模海上风电并网场景得到推广与应用[1-2]。但当电网发生单相短路故障,并网交流电流产生负序分量,会引发功率振荡,影响MMC 稳定运行,严重时导致系统失稳[3-4]。因而,电网不平衡情形下MMC 可靠并网控制是近年海上风电领域研究的热点问题。文献[5]对电网发生单相短路时MMC 交流侧电流进行正、负序分离,提出矢量控制方法,将三相电流转换为dq坐标系下解耦直流分量,对正、负序电流分别设计比例-积分(PI)控制器,实现期望轨迹的有效跟踪。文献[6]应用矢量控制思想,在αβ坐标系下设计比例-谐振(PR)控制器,实现电网电压不平衡下MMC 并网电流的三相平衡控制。传统矢量控制方法运用局部线性化理论对MMC 非线性模型进行分析,设计线性化控制器,方法实现结构简单,但稳定域较窄,当发生外部不确定性扰动或系统内部参数摄动,闭环控制系统稳定性受到挑战。
针对传统矢量控制方法存在的问题,无源性控制方法为电网不平衡下MMC 并网稳定控制提供了全新的思路[7-8]。无源性概念来源于耗散性,通过系统自身能量和外界能量交换描述动力学系统,因而无源性控制方法是从电气角度将MMC 视为能量变换装置,通过设置与控制目标相关的能量函数,设计输出反馈控制律,实现系统能量在期望工作点取得最小值,即在保证系统渐近稳定的同时,实现控制目标[9-10]。 文 献[11]基 于 欧 拉-拉 格 朗 日(Euler-Lagrange,EL)模型,设计MMC 并网电流无源性控制器,验证了无源性理论应用于MMC 具有响应快速、稳定域宽的特点。但EL 模型描述的MMC 输入、输出非线性映射能量函数不能确定为系统总能量函数,无源性控制律设计需沿着Lagrangian 期望轨迹对系统能量函数进行求逆计算,使实际应用受限[12]。文献[13]提出基于端口受控耗散哈密顿(port-controlled Hamiltonian with dissipation,PCHD)模型的无源性控制方法,实现MMC 并网电流的渐近跟踪,同时确保系统渐近稳定。基于PCHD 模型的无源性控制方法将控制问题转化成偏微分方程求解,避免了系统稳定性证明的可逆要求,但未能解决正序和负序子系统dq轴电流之间期望轨迹跟踪不同步,影响无源性控制动态跟踪性能的问题。
考虑电网电压不平衡情形下MMC 正序和负序子系统dq轴电流同步稳定跟踪问题,从能量角度出发,建立单相接地故障下MMC 并网电流正序、负序子系统PCHD 模型,通过求取不影响全局能量耗散的“无功力”,简化无源性控制器设计;结合一致性方法,引入状态变量误差,提出无源一致性控制方法,实现正、负序dq轴电流期望轨迹快速跟踪目标的同步达成,同时保持控制器设计简洁、计算量小的特性。基于MATLAB/Simulink 的仿真结果表明,电网不平衡情形下,当MMC 并网系统存在外部不确定性扰动和系统内部参数摄动时,所提方法能够实现三相并网电流平稳控制,具有动态响应快速、稳定性好、鲁棒性强、同步性好的特点。
1 电网不平衡下MMC 并网PCHD 模型与无源性分析
1.1 电网不平衡下MMC 并网PCHD 模型
电网不平衡下三相MMC 电路结构及子模块如图1 所示。MMC 每一相由上、下2 个桥臂组成,每个桥臂上有N个相同的子模块(SM)和1 个桥臂电感Leq,子模块的绝缘栅双极型晶体管(IGBT)开关损耗由桥臂电阻R表示。子模块为半桥式变换器,根据脉冲信号可以控制S1、S2通断,实现子模块输出电压在Uc和0 之间切换。当电网发生单相短路故障,会引发MMC 输出电流不对称以及环流突增,影响MMC 并网系统稳定运行[12]。
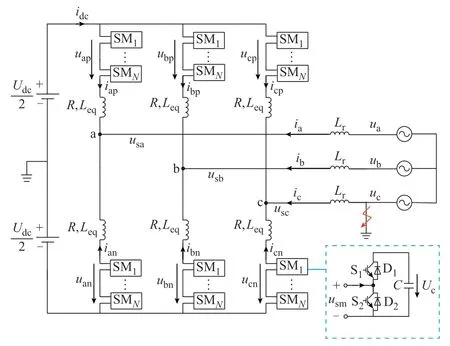
图1 电网不平衡下三相MMC 电路结构及子模块Fig.1 Circuit structure of three-phase MMC and submodule in unbalanced power grid
根据基尔霍夫电压定理,由图1 分析可得,在dq坐标系下MMC 平稳运行时的状态方程为[14]:
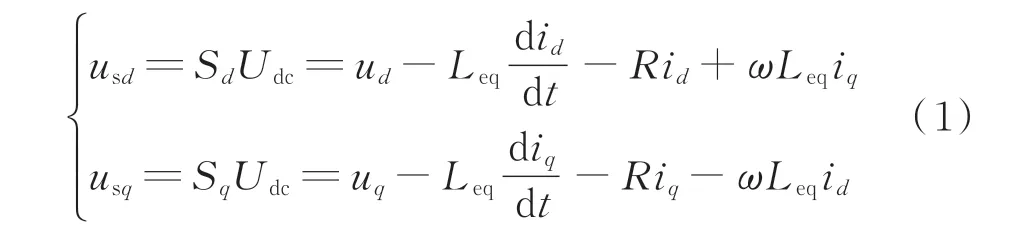
式中:usd、usq分别为MMC 交流侧输出电压usφ(φ=a,b,c)的d、q轴分量;Sd、Sq分别为开关信号的d、q轴 分 量;Udc为MMC 直 流 侧 电 压;ud、uq分 别 为MMC 交流侧电源电压uφ的d、q轴分量;id、iq分别为MMC 交流侧电源电流iφ的d、q轴分量;ω为电网电压初始角频率。
当系统发生单相接地故障,考虑隔离变压器作用,MMC 系统状态方程式(1)转化为正序分量和负序分量2 个子系统,可写为:
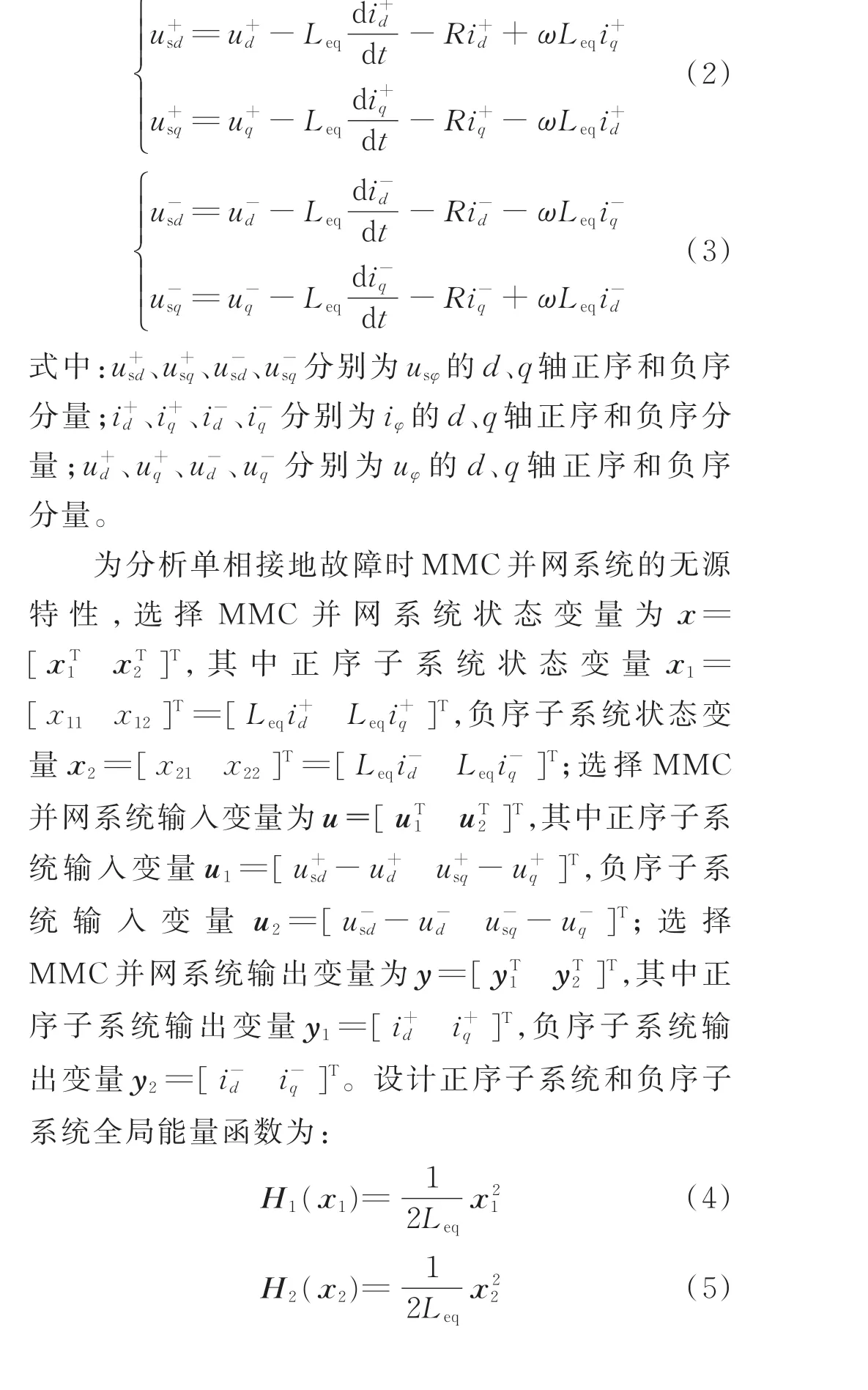
式(4)、式(5)对状态变量求导后,代入式(2)、式(3),可得电网不平衡下MMC 并网系统PCHD 模型为:
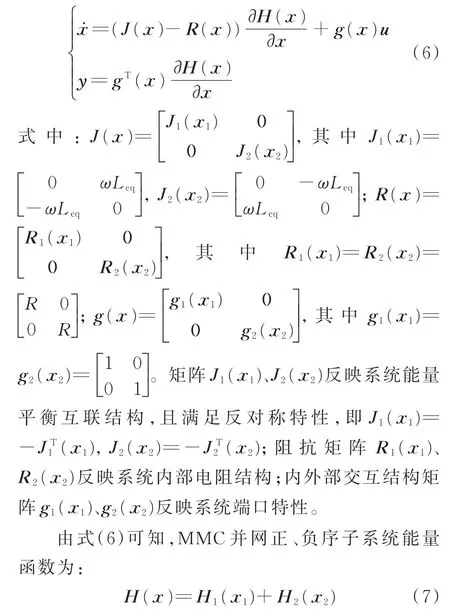
1.2 电网不平衡下MMC 并网PCHD 模型无源特性分析
由式(7)可得MMC 并网系统耗散不等式为:
将J(x)∂H(x)/∂x定义为电网不平衡下MMC并网系统全局能量函数中可配置的“无功力”[16],由于“无功力”对全局能量耗散没有影响,也不影响系统全局渐近稳定性,因此在设计无源性控制器时可以被抵消,实现无源性控制律形式简化。
2 基于PCHD 模型的MMC 无源一致性控制器设计
2.1 实现正、负序电流期望轨迹跟踪的无源性控制器设计
设计MMC 并网系统期望的全局能量函数为:

式中:Ha(x)为系统注入的能量。
式(10)对状态变量求导后代入式(6),可得电网不平衡下MMC 并网系统闭环状态方程为:

式中:Jd(x)=J(x)+Ja(x)为系统期望互联矩阵,满足Jd(x)=-JTd(x),其中Ja(x)为注入的耗散矩阵;Rd(x)=R(x)+Ra(x)为系统期望阻尼矩阵,满足Rd(x)=RTd(x),其中Ra(x)为注入的阻尼矩阵。
设置MMC 并网系统的期望平衡点为:

期望平衡点x*可由系统功率参考值、交流侧电源电压和MMC 交流侧输出电压求取[6]。引入状态反馈,则电网电压不平衡条件下MMC 并网系统期望的能量函数可写为:
联 立MMC 并 网 系 统PCHD 模 型 式(6)和MMC 并网系统闭环状态方程式(11),可得形式简单的无源性控制律为:
由于H(x)、Hd(x)、Ha(x)对状态变量的导数满足:
则由式(15)分析可知:当x=x*时,x*是Hd(x)的一 个 平 衡 点,满 足∂H2d(x)/∂x2=D,即Hd(x)在x=x*处有最小值,则闭环控制系统在平衡点x*处是渐近稳定的。
联立式(14)和式(15),可得无源性控制律为:

为简化控制器设计,可设置Ja(x)=0;控制器参 数 阻 尼 矩 阵Ra(x)=diag(Ra11,Ra12,Ra21,Ra22)与系统能量耗散相关,在满足动态响应快速性需求下,尽可能设计较小的阻尼矩阵Ra(x)以避免能量在系统内部过多消耗,从而提升MMC 输出效率,实现系统能量优化设计与利用。
2.2 实现正、负序dq 轴电流期望轨迹同步跟踪的无源一致性控制器设计
期望轨迹跟踪同步性是一致性控制的核心,利用较少的信息交换和简单的控制器结构,使各个子系统的状态达到一致。
在dq坐标系下,MMC 正、负序子系统通信链路矩阵L1、L2可以表示为:

式中:D′为L1、L2的关联度矩阵;A为邻接矩阵。
Lij为 矩 阵L1、L2节 点(i,j)的 取 值,具 体 如 式(18)所示。
式中:cij为链路参数,cij=1 表示节点i、j相邻,且节点j可以向节点i传输状态信息,否则cij=0。
为实现正、负序dq轴电流期望轨迹同步跟踪,定义状态变量误差为:
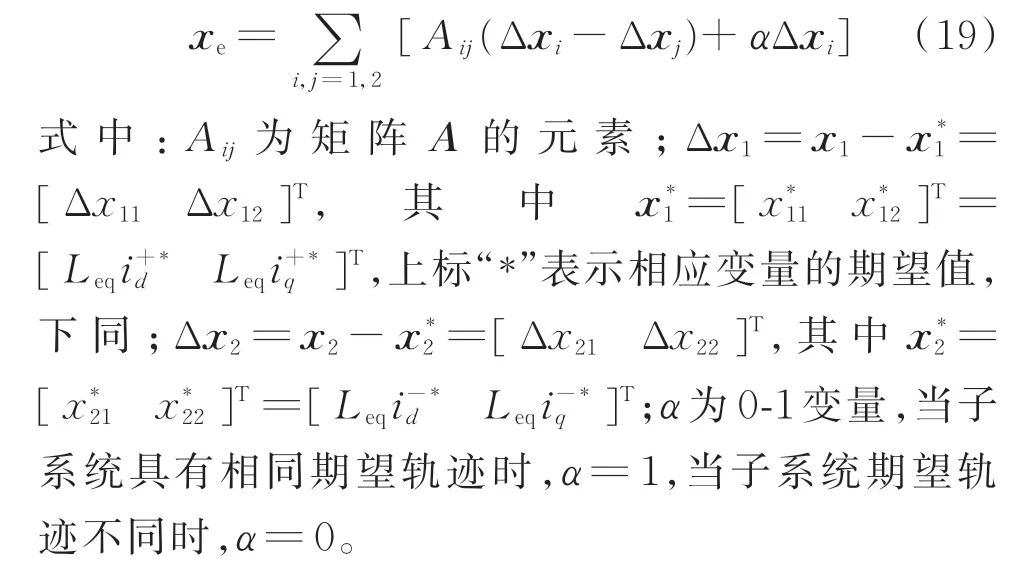
由式(19)分析可知,单相并网电流状态变量误差中同时含有相邻相并网电流期望轨迹跟踪误差,则将并网电流状态变量误差式(19)代入无源性控制期望能量函数式(10),可得含一致性控制目标的期望能量函数为:
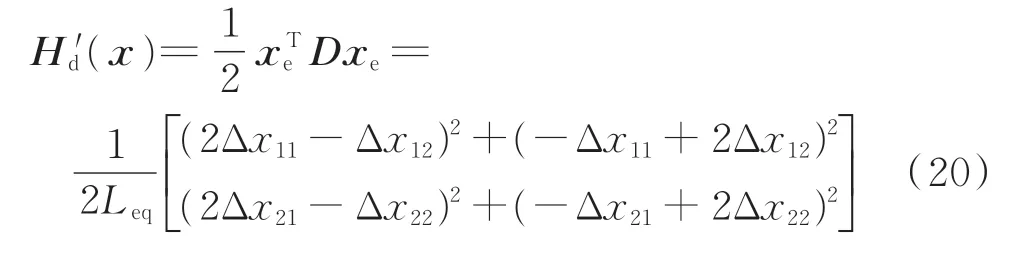
由式(20)可得:
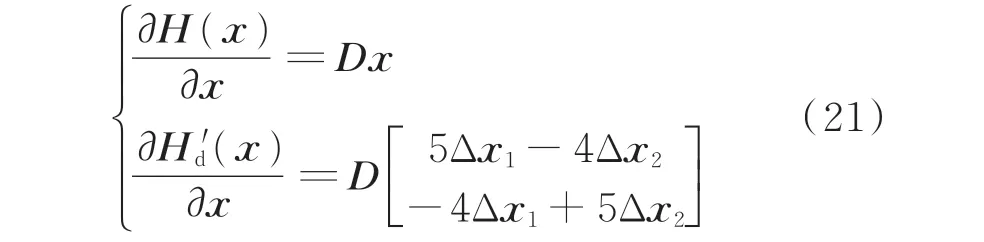
将式(20)和式(21)代入式(16),可得电网不平衡下MMC 无源一致性控制律为:
式中:各变量表达式参见附录A 式(A1)—式(A4)。
由式(23)和式(24)可得电网不平衡下MMC 并网无源一致性控制结构框图如图2 所示,其中Raij为控制器参数阻尼矩阵Ra(x)的元素。分析图2 可知,所提无源一致性控制方法结构简单,计算量较传统矢量控制方法虽稍有增加,但无源一致性控制方法通过寻求控制目标内涵的一致性,可确保闭环控制系统全局渐近稳定的同时,实现正、序负dq轴电流期望轨迹跟踪目标的同步达成,控制性能较优。
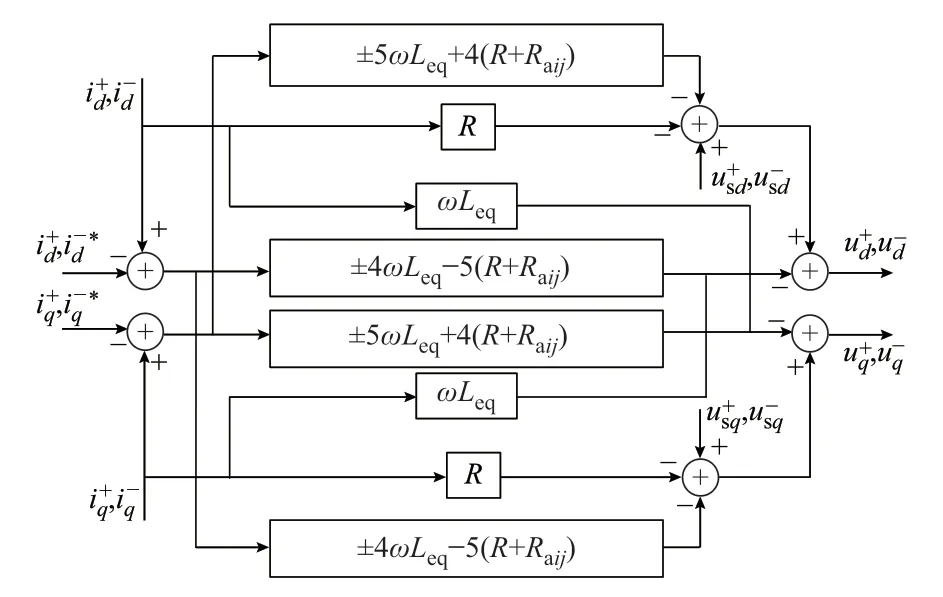
图2 电网不平衡下MMC 并网无源一致性控制结构图Fig.2 Diagram of passivity-consensus based control structure of grid-connected MMC in unbalanced power grid
2.3 实现零序dq 轴电流期望轨迹同步跟踪的无源一致性控制器设计
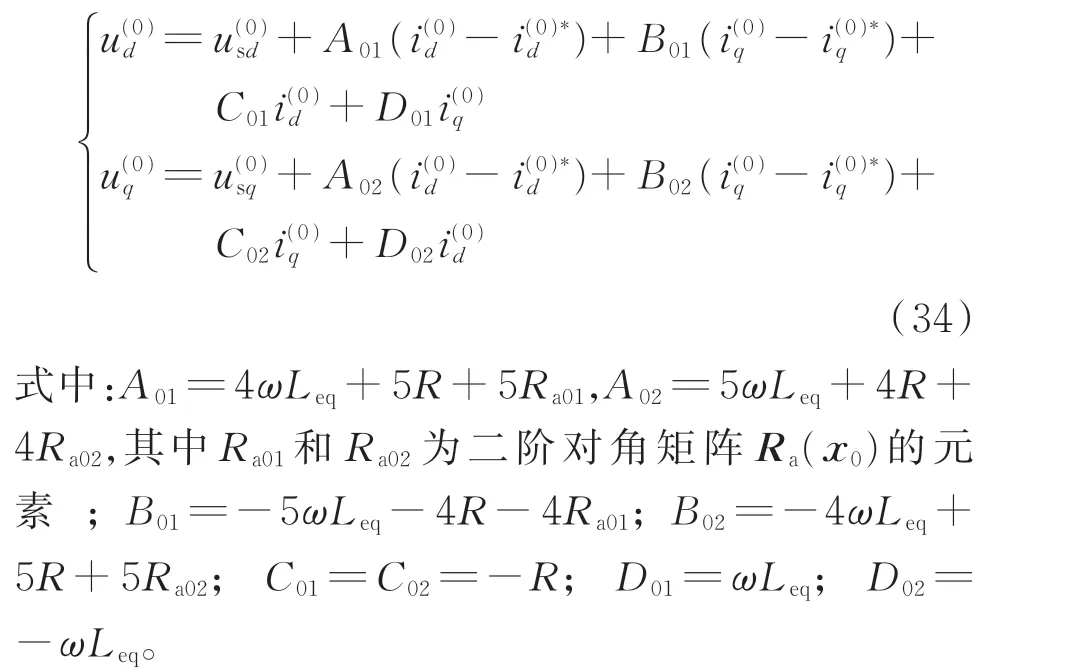
若线路变压器为Yd11 接法,当电网侧电压不平衡发生,变压器可以有效隔离电网侧零序分量,MMC 系统中仅正序和负序分量被传递。若线路变压器为Yyn0 接法,当电网侧电压不平衡程度过大,接地电阻无法抑制零序电流时,需设计零序电流控制器抑制零序电流i(0)[5],其中上标“(0)”表示零序变量,下同。
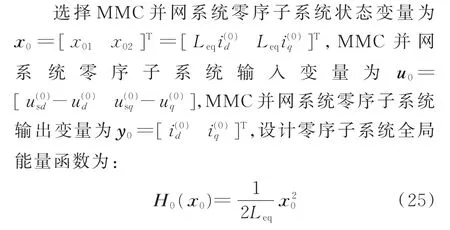
根据式(25),构建电网不平衡下MMC 并网零序子系统PCHD 模型为:
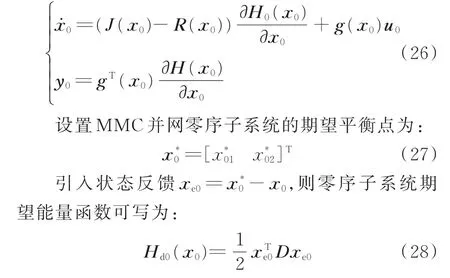
将 式(28)代 入 式(26),可得电网不平衡下MMC 并网零序子系统闭环状态方程为:

式中:Jd0(x0)为零序子系统期望互联矩阵;Rd0(x0)为零序子系统期望阻尼矩阵。
联立式(26)和式(29),可得无源性控制律为:
为实现零序dq轴电流期望轨迹同步跟踪,定义状态变量误差为:

将式(31)代入式(25),可得含一致性控制目标的期望能量函数为:

将 式(32)代 入式(30),可 得电网不平衡下MMC 并网零序子系统无源一致性控制律为:

即
2.4 电网不平衡下MMC 并网无源一致性控制系统稳定性分析
利用La Salle 不变集定理[12,17],将全局能量函数V(x)选为Lyapunov 函数,则无源一致性闭环控制系统的总能量函数为:

对式(35)求导可得

式中:

因所选V(x)是半正定函数,V˙(x)≤0,且系统最大不变集为x=x*,由La Salle 不变集定理可知,在平衡点x*附近,系统具有全局渐近稳定性。
又因为‖ ‖x→∞时,V(x)→∞,Hd(x)趋近于无穷大,由Lyapunov 稳定理论可知,在平衡点x*附近,系统是全局渐近稳定的。
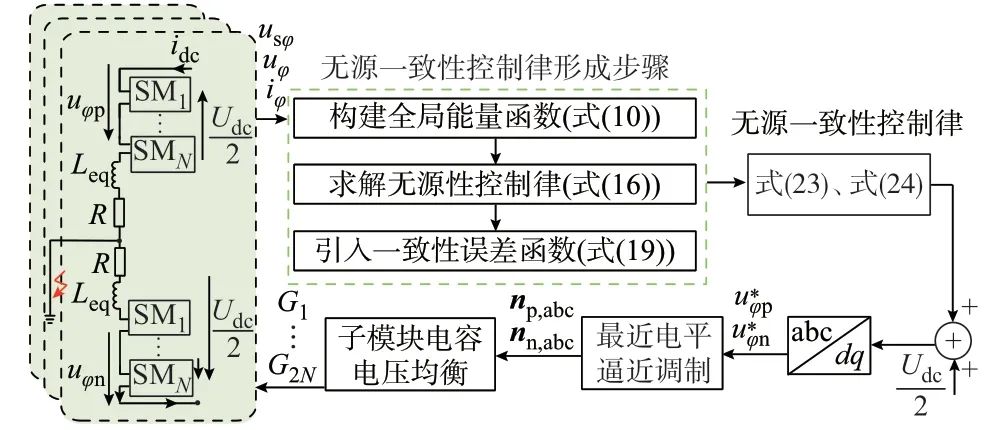
图3 电网不平衡下MMC 并网控制框图Fig.3 Block diagram of grid-connected MMC control in unbalanced power grid
3 基于MATLAB 的仿真结果分析
利用MATLAB/Simulink 平台搭建电网单相短路故障工况下的MMC 控制系统,完成控制方法性能验证。借助实时仿真器RT-LAB 的并行运算能力,建立MMC 子模块网络的开关函数等效模型[19],实现三相MMC 并网系统实时仿真,MMC 并网控制器由MATLAB/Simulink 构建,通过对系统参量进行观测与调控,完成无源一致性控制方法与传统矢量控制方法的仿真对比研究。仿真参数如附录A表A1 所示,电网不平衡下MMC 并网控制方法的仿真参数如附录A 表A2 所示。表A2 中各参数为最优动静态控制效果下取得,其中矢量控制PI 参数通过阶跃响应曲线法整定获得[20]。
3.1 单相接地故障下MMC 并网控制性能仿真结果分析
设置t=0.2 s 时MMC 交流侧发生a 相接地故障,a 相交流电压幅值跌落94%,故障持续时间为0.1 s,在t=0.3 s 时系统恢复平稳,如图4(a)所示。应用传统矢量控制方法和所提基于PCHD 模型的无源一致性控制方法的仿真结果如图4(b)至(i)所示。
MMC 的a 相电流波形如图4(b)所示。分析图4(b)可知,当系统发生单相短路接地故障,应用传统矢量控制方法和所提方法都可实现a 相电流平稳控制和三相交流电压平衡,由于正序电流注入,使得a相接地故障发生期间并网电流幅值有所增大。
MMC 并网有功功率和无功功率波形分别如图4(c)和(d)所示。分析图4(c)和(d)可知,当系统发生单相接地故障,通过向系统有功功率和无功功率注入二倍频分量,实现并网电压与电流的三相平衡控制,所提方法从能量角度出发设计,以期望轨迹跟踪为目标,设计全局渐近稳定的控制器,较传统矢量控制方法,在a 相短路故障切入和切出过程中,具有更快的动态响应速度和更小的稳态误差。
MMC 正、负序dq轴电流波形分别如图4(e)至(h)所示。分析图4(e)至(h)可知,所提方法通过能量函数整形和虚拟阻尼注入,实现了正序电流期望轨迹的快速跟踪与负序电流的快速抑制;通过结合一致性方法,正、负序dq轴电流期望轨迹跟踪的调节时间都约为7.8 ms,实现了正、负序子系统dq轴电流的同步跟踪。较传统矢量控制方法,发生a 相接地故障期间,所提方法正、负序电流期望轨迹跟踪稳态误差更小。
由图4 分析可知,应用传统矢量控制方法和所提基于PCHD 模型的无源一致性控制方法都可实现系统发生单相短路接地故障时MMC 稳定控制,但所提方法动态响应更为快速,超调和稳态误差更小,正、负序子系统dq轴电流的同步协调性更优。
3.2 系统短路故障与外部干扰、内部参数摄动同时存在情形下MMC 并网控制性能仿真结果分析
3.2.1 系统短路故障与直流侧电压阶跃变化同时存在情形
考虑系统短路故障与直流侧电压阶跃变化同时发生:MMC 交流侧发生a 相接地故障,如图4(a)所示;t=0.2 s 时,MMC 直 流 侧 电 压 从180 kV 阶 跃 上升至189 kV,t=0.3 s 时,MMC 直流侧电压阶跃下降至180 kV,如图5(a)所示。
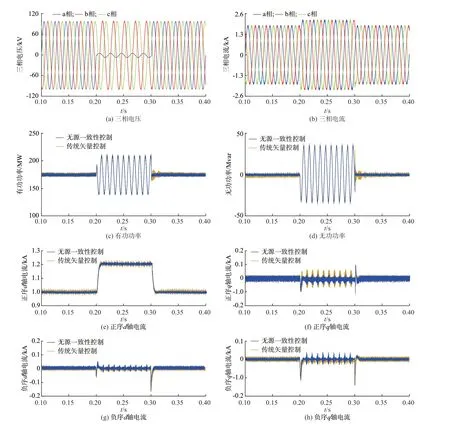
图4 系统短路故障下MMC 仿真波形Fig.4 Simulation waveforms of MMC with system short-circuit fault
系统短路故障与直流侧电压阶跃变化同时发生时,应用传统矢量控制方法和所提基于PCHD 模型的无源一致性控制方法仿真结果如图5(b)至(e)所示。
MMC 正、负序dq轴电流波形分别如图5(b)至(e)所示。比较图4(e)至(h)和图5(b)至(e)可知,系统短路故障与直流侧电压阶跃变化同时发生,使得稳态波动幅值增大,但所提方法经短暂动态调整,快速恢复平稳运行,较矢量控制方法,超调和稳态误差更小。当t=0.3 s 退出a 相短路接地故障后,由于直流侧电压发生阶跃下降,正、负序dq轴电流波形出现小幅波动,但闭环控制系统依然保持稳定运行,外部扰动的存在并未对所提方法控制三相不平衡的抑制性能产生明显影响,依然能够快速收敛于期望工作点。
由图4 和图5 对比分析可知,当系统短路故障与直流侧电压阶跃变化同时发生,较传统矢量控制方法,基于PCHD 模型的无源一致性控制方法动、静态性能保持较好,经短暂动态调整,能够快速跟踪至期望工作点,稳定性更好。
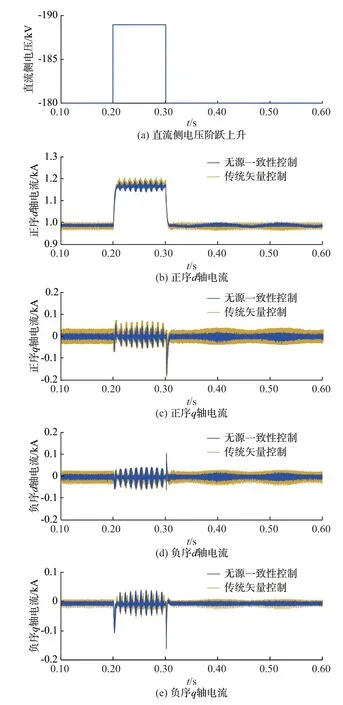
图5 系统短路故障与MMC 直流侧电压阶跃变化时的仿真波形Fig.5 Simulation waveforms with system short-circuit fault and DC-side voltage step change of MMC
3.2.2 系统短路故障与有功功率波动同时存在情形
考虑系统短路故障与有功功率波动同时发生:MMC 交流侧发生a 相接地故障,如图4(a)所示;t=0.20 s时,MMC 有功功率由2.0 MW 突增至2.2 MW,t=0.30 s 时,MMC 有功功率突降至2.0 MW,如图6(a)所示。
系统短路故障与有功功率波动同时发生时,应用传统矢量控制方法和所提基于PCHD 模型的无源一致性控制方法的仿真结果如图6(b)至(e)所示。
MMC 正、负序dq轴电流波形分别如图6(b)至(e)所示。比较图5(b)至(e)和图6(b)至(e)可知,系统短路故障与有功功率波动同时发生,系统短路故障切入与切除时,所提控制方法实现了更小的稳态静差,表明所提控制方法对于有功功率波动的控制性能较直流侧电压阶跃变化具有更优的控制效果,因无源一致性控制方法应用于电流环,对于有功功率波动具有更强的调节性能,同时对正、负序dq轴电流期望轨迹跟踪保持了较好的同步性。
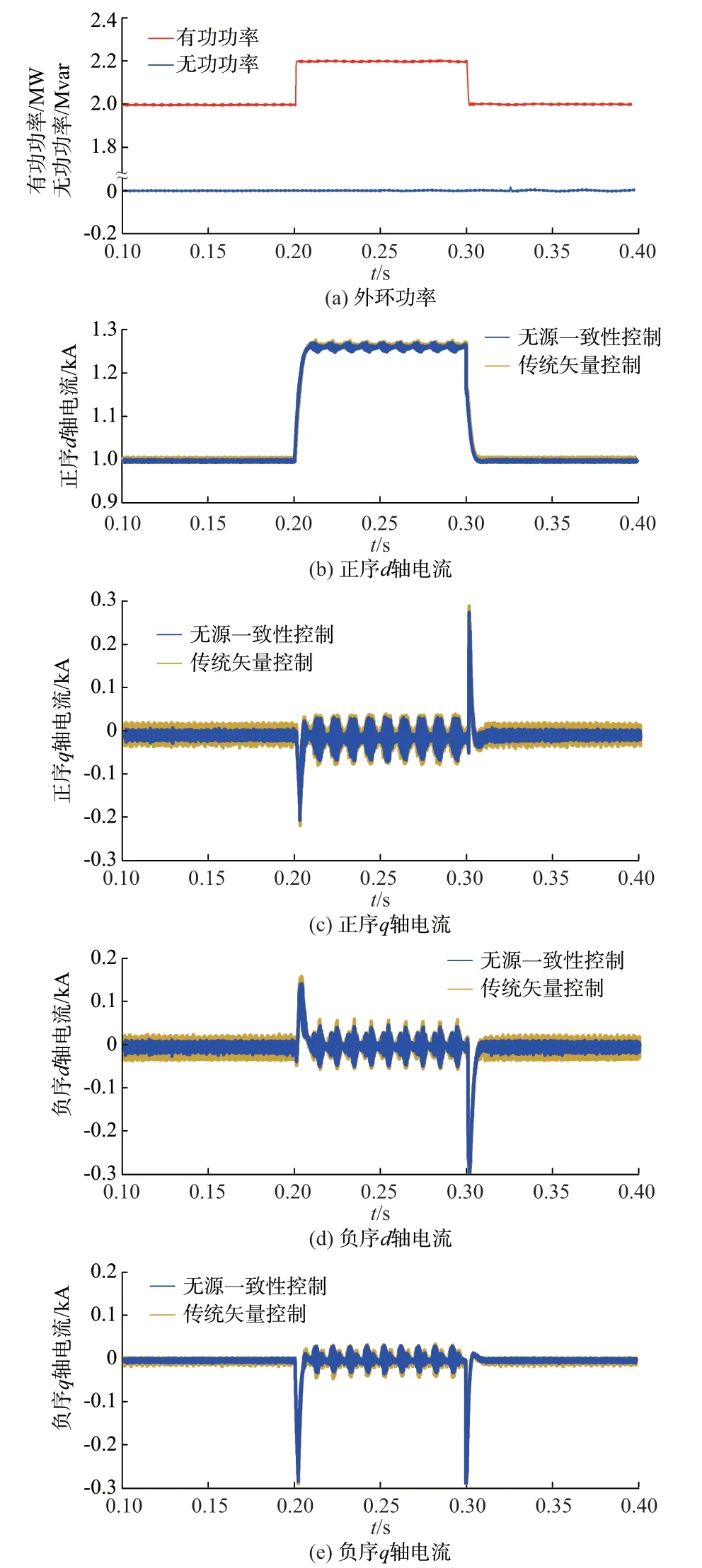
图6 系统短路故障与MMC 有功功率波动时仿真波形Fig.6 Simulation waveforms with system short-circuit fault and active power change of MMC
由图4 和图6 对比分析可知,相比直流侧电压阶跃变化,所提基于PCHD 模型的无源一致性控制方法对于有功功率波动具有更优的动、静态性能,正序电流快速跟随有功功率变化,同时抑制交流侧电压不平衡产生的负序电流,响应快速,超调和稳态误差更小,稳定性好。
3.2.3 系统短路故障与MMC 参数摄动同时存在情形
考虑系统短路故障与MMC 参数摄动同时发生:MMC 交流侧发生a 相接地故障,如图4(a)所示;MMC 桥 臂 电 阻 由0.6 Ω 变 为1.08 Ω,桥 臂 电 感 由15 mH 变为15.75 mH。
系统短路故障与MMC 参数摄动同时发生时,应用传统矢量控制方法和所提基于PCHD 模型的无源一致性控制方法的仿真结果如图7 所示。
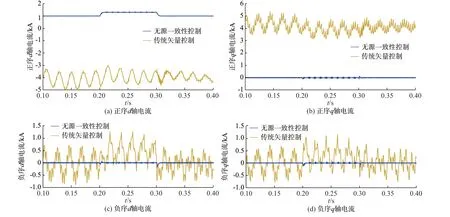
图7 系统短路故障与MMC 参数摄动时仿真波形Fig.7 Simulation waveforms with system short-circuit fault and parameter perturbation of MMC
MMC 正序和负序d轴、q轴电流波形分别如图7(a)至(d)所示。比较图4(e)至(h)和图7(a)至(d)可知,由于传统矢量控制方法依赖于局部线性化的小信号模型,对MMC 参数变化较敏感,在MMC桥臂阻感参数发生大幅摄动情形下,闭环控制系统出现失稳现象,正、负序电流出现大幅波动,未收敛至期望工作点;所提无源一致性控制方法在单相不平衡与MMC 桥臂阻感变化同时发生情形下,仍能保持系统稳定运行,正、负序dq轴电流期望轨迹跟踪响应快速,同步性好,超调和稳态误差都很小,全局渐近稳定的无源性控制器对于MMC 参数摄动具有较强鲁棒性。
由图4 和图7 对比分析可知,所提基于PCHD模型的无源一致性控制方法克服了传统矢量控制方法依赖于局部线性化小信号模型的不足,对于MMC 参数摄动具有较好的动、静态控制性能,鲁棒性较强,稳定域较宽。
系统短路故障分别与直流侧电压阶跃变化、有功功率波动、MMC 参数摄动同时发生情形下,传统矢量控制方法和基于PCHD 模型的无源一致性控制方法的并网电流和环流控制动态响应性能指标如表1 所示。为评估系统运行条件变化时MMC 并网电流的波动程度,引入波动幅度评价指标:

表1 2 种控制方法的动态性能指标量化计算结果Table 1 Quantitative calculation results of dynamic performance indicators for two control methods

式 中:t为 时 间;为 突 变 时 电 流 正 序d轴 分 量 参考值。
由表1 量化计算结果可知,所提基于PCHD 模型的无源一致性控制方法在系统短路故障分别与直流侧电压阶跃变化、有功功率波动、MMC 参数摄动同时发生情形下,较传统矢量控制方法,正序dq轴电流期望轨迹跟踪响应时间更短,超调量和波动幅度更小,稳定性好,综合控制性能较优。
4 结语
针对电网电压不平衡下MMC 稳定控制问题,本文从系统非线性本质出发,提出形式简单、稳定性好、同步性优的无源一致性控制方法,能够实现正、负序dq轴电流期望轨迹快速跟踪的同步控制,同时闭环控制系统满足Lyapunov 定理意义下的全局渐近稳定性。所提方法的特点在于:
1)建立电网不平衡下MMC 的PCHD 模型,合理设计与控制变量相关的全局能量函数,无须沿着预设期望轨迹进行求逆计算,即可确保闭环控制系统全局渐近稳定,克服了传统矢量控制依赖于局部线性化小信号模型的不足。
2)基于PCHD 模型,设计全局渐近稳定的无源性控制律,通过全局能量整形,实现系统内部能量优化利用,提升MMC 输出能效,仅需较小的注入阻尼,即可实现外部不确定性扰动和内部参数摄动情形下正、负序电流期望轨迹快速跟踪。
3)将一致性控制引入无源性控制律,保持控制器形式简单,计算量小,提升并网正、负序dq轴电流渐近跟踪的一致性,同步性好,增强了工程适应性。
为进一步提升MMC 并网系统运行稳定性,将所提无源一致性控制方法拓展至相间环流抑制、子模块电容电压波动控制等应用场景是下一步值得开展的研究工作。
附录见本刊网络版(http://www.aeps-info.com/aeps/ch/index.aspx),扫英文摘要后二维码可以阅读网络全文。
猜你喜欢
中学生数理化·高一版(2021年11期)2021-09-05 12:21:24
上海大中型电机(2021年2期)2021-07-21 03:01:36
电子制作(2019年12期)2019-07-16 08:45:14
西南交通大学学报(2018年6期)2018-12-18 02:22:18
测控技术(2018年10期)2018-11-25 09:35:38
北京航空航天大学学报(2017年6期)2017-11-23 05:57:06
现代防御技术(2016年1期)2016-06-01 12:13:28
互联网天地(2016年2期)2016-05-04 04:03:23
新高考·高一物理(2016年1期)2016-03-05 22:47:39
电测与仪表(2015年13期)2015-04-09 11:57:34
