改进的粒子群算法求解函数极值研究
2022-02-15 02:48钱泽钜
信息记录材料 2022年12期
钱泽钜
(西藏民族大学 陕西 咸阳 712082)
0 引言
在求解函数极值的问题中,当函数比较简单时,可以通过直接求解求得极值。但是,大部分函数是无法通过直接求解求得极值。这时就需要用到智能算法,在一个解空间中寻找最优极值解。
传统的智能算法包括遗传算法、粒子群、鱼群算法等。其中,粒子群算法有简单易行、收敛速度快、设置参数少等优点。所以,本文采用粒子群算法来解决函数求极值的问题。
1 标准粒子群算法
粒子群算法的思想来源于对鸟类捕食行为的研究,模拟大的鸟群落通过协同合作的捕食行为。行为基础就是共享自身与种群信息,根据此基础来判断食物所在。
1.1 粒子群算法简介
鸟群中有很多只鸟,而每一只鸟都是一个问题,称为“粒子”。每个粒子在一个空间内进行搜索。其所在位置的好坏是由适应度函数决定的,也就是fitnessfunction。而且,每个粒子需要有记忆性和速度以决定飞行的位置与方向。这就需要粒子根据自身的经验与群体的经验来决定[1-2]。
1.2 粒子群算法的实现步骤
(1)初始化种群。初始化,包括要达到的群体规模N。每一只鸟,也就是每一个粒子随机初始化位置向量Xi,随机初始化速度向量Vi。
其中Xi=(xi1,xi2,…,xiD),Vi=(vi1,vi2,…,viD)。
(2)将初始生成的随机位置向量中每一个xi代入所要求极值的函数f(xi),所求的函数极值就是适应度值Fitness(i)。
(3)计算初始化的粒子的适应度值,将最开始计算的每个初始化粒子的适应度值储存为个体极值Pbest,将所有初始化粒子的个体极值Pbest进行比较,选择最优的作为当前全局最优,存入全局极值Gbest。
(4)算法开始迭代,每迭代一次,对于每一个粒子,用其适应度值Fitness(i)和与上一次迭代的个体极值Pbest作对比,如果Fitness(i)优于个体极值Pbest,就用适应度值Fitness(i)替代个体极值Pbest。如果Fitness(i)并不优于个体极值Pbest,则保留个体极值Pbest[3-4]。
(5)对于每一个粒子,用其适应度值Fitness(i)与上一次迭代的全局极值Gbest作对比,如果Fitness(i)优于全局极值Gbest,就用Fitness(i)替代全局极值Gbest。如果Fitness(i)并不优于全局极值Gbest,则保留全局极值Gbest。
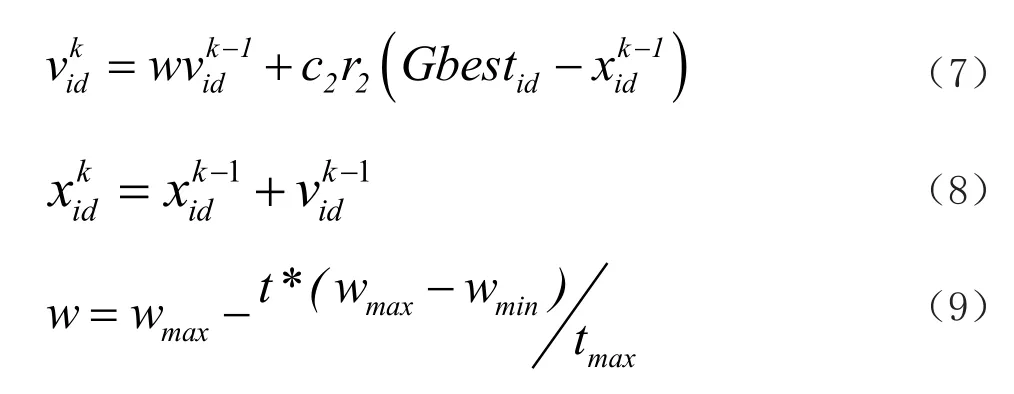
(6)更新粒子的位置Xi与速度Vi

其中,ω为惯性因子,较大的ω拥有较强的全局搜索能力,较小的ω拥有较强的局部搜索能力。c1与c2为学习因子,也称为加速常数,其中c1是个体部分,如果c1过小,则容易陷入局部最优。c2集体部分,如果c2过小,会导致算法收敛速度变慢。r1,r2为[0,1]范围内的均匀随机数。为上一次迭代的粒子位置,为上一次迭代的粒子速度。为本次迭代的粒子位置,为本次迭代的粒子速度。
(7)如果满足最大循环次数的条件,则停止循环,如果不满足,则返回步骤(4)。
算法框如图1所示:
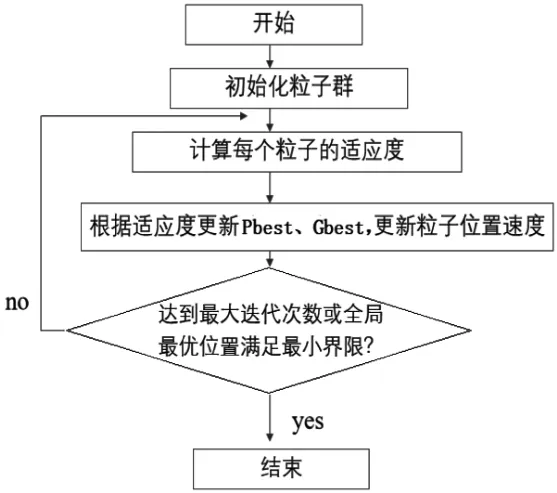
图1 传统粒子群算法流程
2 改进粒子群算法解决函数求极值问题
2.1 算法的改进
将算法进行分层,分为两层,第一层负责算法前期,并且混合遗传算法,用来扩大搜索范围;第二层负责算法后期,主要用作精准搜索,加速收敛。这样做,就可以将一个矛盾复杂的要求,分解成两个小的部分,各司其职,来完成算法的搜索[5]。混合粒子群算法,就是将其他优化算法的一些技术应用到粒子群算法之中,用于提升粒子的多样性,使其可以跳出局部最优,增强全局寻优的能力,本文采用遗传算法中的杂交概念,混合入粒子群算法。针对传统的固定惯性因子ω,无法兼顾算法前期与后期不同的要求,改为线性递减的惯性因子ω。其公式为:
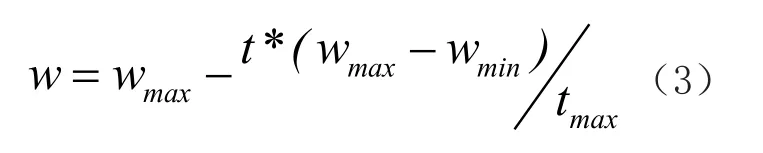
其中,wmax为惯性因子的最大值,wmin为惯性因子的最小值,t为迭代次数,tmax为最大迭代次数。
2.2 基于杂交的粒子群算法
该算法是借鉴了遗传算法中的杂交概念[6],在每次的迭代之中,根据杂交的概率[7-8],首先选择一定量的粒子作为父代粒子放入到杂交池子中,让池子中的粒子进行杂交操作,产生与父代粒子个数相同的子代粒子,并用产生的子代粒子替换父代粒子。
分层混合粒子群算法的实现步骤:
(1)在规定的范围之内,随机设置初始化粒子的位置与速度。
(2)计算初始化的粒子的适应度值,将最开始计算的每个初始化粒子的适应度值储存为个体极值Pbest,将所有初始化粒子的个体极值Pbest进行比较,选择最优的作为当前全局最优,存入全局极值Gbest。
(3)设置参数T,T小于最大循环次数。当算法循环次数小于T时,进入步骤(4),当算法循环次数大于T时,进入步骤(5)。
(4)对每个粒子的速度与位置进行更新。进入步骤(6)。

(5)对每个粒子的速度与位置进行更新。进入步骤(6)。
(6)计算每一个更新后的粒子的适应度值,将适应度值与粒子最好位置比较。更新全局极值Gbest。
(7)根据一定的杂交概率选取指定数量的粒子,并将选取的指定数量的粒子放入杂交池。将两个父代个体的部分进行替换重组构成新的个体,并用子代粒子替代父代粒子,子代的位置与速度为:
其中,保持Pbest和Gbest不变。mx(1),mx(2)为两个不同的父代粒子,nx为交叉操作后的子代粒子的位置,nv为交叉操作后的子代粒子速度,i是0到1之间的随机数。
(8)当如果满足结束条件(循环次数满足最大循环要求),则停止循环,如果不满足,则返回步骤(3)。
3 算法仿真测试
3.1 测试函数介绍
为了验证所提出算法是否有效,选取两个类型不同的函数,作为测试函数进行测试验证。
其中,Y1是一个多维函数,Y2是一个复杂的多模函数。通过传统的PSO算法与改进的PSO算法对两个不同类型函数的对比,来验证算法是否有效。
3.2 算法仿真
对出传统的PSO算法,初试种群选择为50,c1与c2学习因子设置为2,ω惯性权重设置为0.8。改进PSO算法,Y1中设置T为10,Y2中设置T为100,除了w惯性权重设置不同外,其余设置与传统PSO算法设置相同,其中,惯性权重w设置为区间[0.6,0.8]。在测试函数时,式(1)取最大迭代次数为100,式(2)取最大迭代次数为1 000,对两个函数各优化10次。算法是否可以快速稳定的收敛,是否可以跳出局部最优得到全局最优,可以衡量一个算法是否优秀。越快收敛,且能跳出局部最优,说明快速有效的求解函数极值。通过对比收敛结果与收敛速度,来展示改进算法的有效性,结论如表1和图2所示:

图2 测试函数适应度值变化
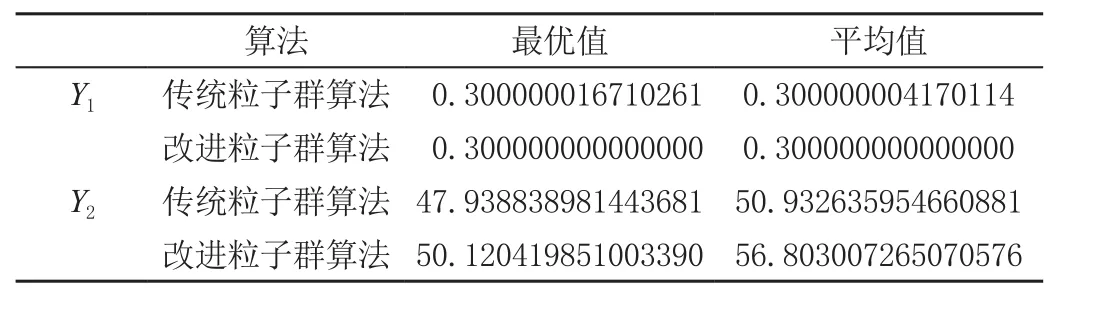
表1 测试函数优化结果
通过以表1、图2可以看出,改进PSO算法对比传统PSO算法在收敛速度与收敛结果这两个方面,新算法收敛速度更快。在收敛结果上,新算法也拥有更好的稳定收敛结果。
3.3 仿真结果
从上图可以看出,改进的粒子群算法与传统粒子群算法相比,有比较明显的优势。对于测试函数Y1改进的算法收敛速度更快,基本在10步左右就可以收敛,收敛速度快,说明算法求解函数极值的速度快。即便算法前期陷入局部最优解,也可以很快地跳出局部最优。而传统算法侧需要35次左右才能收敛,对比改进的算法,收敛速度慢一些,说明算法求解函数极值慢一些,而且,陷入局部最优解时,跳出局部最优比较慢。而收敛结果,改进算法可以稳定收敛到0.3。但传统算法却无法稳定收敛,在0.3附近波动。对于测试函数Y2,改进算法在100步左右就可以收敛,收敛速度快,且稳定收敛。而传统算法则需要250步左右才能收敛,收敛速度不如改进算法,收敛缓慢,且陷入局部最优。
4 结语
本文提出的改进粒子群算法,是先通过对算法进行分层,再局部融合其他智能算法,同时采取自适应权重的方法实现的。在算法前期,扩大搜索范围,避免陷入局部最优;在算法后期,加速算法的收敛,并用于解决函数求极值的问题。实验结果表明,改进的粒子群算法整体性能良好,可用于求解其他函数求极值的问题。
猜你喜欢
大学教育科学(2022年6期)2022-12-06
——基于人力资本传递机制
贵州财经大学学报(2022年5期)2022-11-16
太原科技大学学报(2022年1期)2022-02-24
新世纪智能(数学备考)(2021年10期)2021-12-21
计算机仿真(2021年1期)2021-11-18
——基于反向社会化理论的实证研究
吉林体育学院学报(2021年2期)2021-06-01
河北理科教学研究(2020年3期)2021-01-04
语数外学习·高中版中旬(2020年10期)2020-09-10
东北大学学报(自然科学版)(2020年1期)2020-02-15
中学数学杂志(2019年1期)2019-04-03