面向智能网联汽车边缘网络的分布式端-边协同算法
2022-02-11 09:44朱凯男朱永东赵志峰刘云涛
无线电通信技术 2022年1期
朱凯男,朱永东,赵志峰,刘云涛,张 园
(1.之江实验室,浙江 杭州 311121;2.中国电信研究院新兴技术研究所,上海 200000)
0 引言
车联网技术通过无线接入技术让道路上安装了车载设备单元(On Board Unit,OBU)的车辆可以与行人、相邻的智能网联汽车、路侧设备单元(Road Side Unit,RSU)或者基站等实体便捷地进行各种信息的交换和传播[1-2]。通过这种方式,智能网联汽车可以获取碰撞预警等信息,从而及时采取相应的措施,进而降低交通事故的发生率、提升自动驾驶车辆的安全性[3-4]。道路管理者可以利用车联网技术实时获取交通信息,通过车速引导等方式缓解城市交通的拥堵状况,并达到车辆节能减排的目的[5-6]。
车联网高级安全服务中,智能网联车辆配备了摄像头,可以拍摄周围的视频,用于安全、交通监控和监视等目的[7]。车辆将获取的视频上传到边缘计算节点后,可以对视频进行分析和备份,以满足不同的安全驾驶需求。现有研究显示,如果将车辆获取的视频及时传输到边缘计算节点进行视频分析和备份,可以极大地提高公共安全性[8-9]。然而,海量的视频内容上传会给当前的车联网增加巨大的流量,导致大量的带宽和能量消耗[10]。
为了解决上述问题,现有的学术工作主要关注内容下载[11-13]。E.Evdokimova[11]等人提出了一个分析框架,该框架通过多维马尔可夫过程对直通车联网场景中的下行链路流量进行建模:将RSU缓冲区中的数据包到达构建为泊松过程,并且传输时间呈指数分布。考虑到与多维马尔可夫过程相关的状态空间爆炸问题,该文使用迭代扰动技术来计算马尔可夫链的平稳分布。L.Yang等人[12]研究了混合数据传播问题,即优化确定数据传输的时间和目的车辆,以及车辆是直接从边缘还是从附近的车辆获取所需数据,目的是最小化边缘的流量成本并满足获取数据的时延要求;文中提出了一种新的数据传播算法,称为混合数据传播离线算法,该算法优先寻找最有益的车到车广播,然后选择可行的车到基站传播方式。J.He等人[13]通过权衡交付延迟和保管箱部署成本二者之间的关系来研究如何以最佳方式部署保管箱,为了解决该问题,首先提供了一个理论框架来准确估计交付延迟;然后,基于维度扩大和动态规划的思想,设计了一种新颖的最优保管箱部署算法(ODDA)以获得最优部署策略。在内容上传方面,L.Cui等人[10]提议在公交车站部署专用接入点 (AP) 以促进视频上传来研究移动公交车的视频上传问题,提出了一种注水放置算法,旨在平衡分配给每条总线的聚合带宽,通过建立排队模型来分析视频内容的上传延迟,并进一步采用机器学习模型将公交路线的影响纳入排队模型中。
本文提出一种面向智能网联汽车边缘网络的分布式端(智能网联汽车)-边(边缘计算节点)协同算法。针对车联网高可靠低时延内容传输的特点,引入有限块长度机制[14]。同时,引入车辆视频信息源的压缩编码功率消耗,建立车辆能耗模型。根据车辆视频信息源的视频质量要求,通过调整视频编码码率、信息源传输速率,以及对车辆多路径路由的选择,提出一种完全分布式的优化算法,提高网络资源利用率,并保证单个车辆的能耗公平性。
1 系统模型


图1 智能网联汽车边缘网络边-端协同系统Fig.1 End-to-edge collaboration system for edge network of intelligent connected vehicles

1.1 视频失真率模型
在智能网联汽车边缘网络边-端协同系统中,视频上传的端到端失真大小包括两个不相关的部分[15]:① 由视频压缩引起的压缩编码失真Dc;② 由通信传输引起的传输失真Dt。数学上,端到端失真大小D可以表示为:D=Dc+Dt。

(1)
式中,σ2为平均视频输入方差,e为自然对数函数的底数,γ为与编码效率相关的参数。根据失真率模型,如图2所示,在给定视频压缩编码失真大小的情况下,信息源编码后数据速率越大,则视频压缩编码功率消耗越小;在给定信息源编码后数据速率的情况下,视频质量(表示为失真大小)越好,则视频压缩编码功率消耗越大。

图2 给定参数下(σ2=3 500,γ=55.54)功耗-速率- 失真大小的分析模型示例图Fig.2 Illustration of the power-rate-distortion model with given parameters (σ2=3 500,γ=55.54)
另一方面,S.Pudlewski等人[17]的研究表明在设定合适的目标误码率前提下,由通信传输引起的传输失真相较于由视频压缩引起的压缩编码失真而言,可以忽略不计。因此,总视频失真大小仅考虑由视频压缩引起的压缩编码失真。
1.2 传输信道模型

由于多媒体数据传输的传输延迟要求短,传统的香农容量不再适合表征给定块错误概率的最大可实现数据传输速率。为此,有限块长度编码技术已被开发用于可靠的多媒体移动无线网络[19]。假设完美的信道状态信息条件下,给定信息比特长度L和信噪比γl,则有限块长度编码技术中可取得的最大编码速率可以表示为:
(2)

(3)
式中,Bl是链路l的传输带宽,通信链路l上的数据传输流量fl需小于最大有效传输速率cl,数学上表示为:
(4)
1.3 网络数据流平衡模型
对于智能网联汽车边缘网络中的任一节点(智能网联汽车、基站与边缘网关)而言,流出该节点的数据信息流量需等于流入该节点的数据信息流量与该节点产生的数据信息流量之和。因此,网络流平衡模型可以表示为:
(5)
对于智能网联汽车而言,节点产生的数据信息流量为视频信息源编码后数据速率;基站与边缘网关是智能网联汽车信息传输的汇聚点,其数据信息流量为所有智能网联汽车数据信息流量之和的负数。因此,智能网联汽车或基站与边缘网关i的信息源编码后数据速率R(i)可以表示为:
(6)
1.4 能量消耗模型

(7)


(8)

利用上述数学模型,智能网联汽车i的视频压缩和通信总能耗模型表示为:
(9)
式中,由于εl为给定数值参数,因此可以将1-εl视为常数。在以下分析中,为了便于阅读,将1-εl在式(9)中进行省略。
2 优化问题建模


约束条件:
对上述4个约束条件的解释如下:
① 规定了网络流平衡条件;

④ 规定了通信链路l上的数据传输流量fl需小于最大有效传输速率cl;
⑤ 规定了变量智能网联汽车的能耗大小Pi、信息源编码后数据速率R(i)、通信链路l上的数据传输流量fl的取值需不为负数。
3 分布式优化算法
(10)
经过上述改动,优化问题P1可以改写为优化问题P2:

约束条件:
容易证明上述优化问题P2是凸优化问题。为了提供一种完全分布式的优化算法,利用拉格朗日松弛约束条件,得到优化问题P2的拉格朗日对偶函数:
其中,λi、θi、μi和φl是拉格朗日乘子或对偶变量;R、f、Pc和P是原始变量。
利用次梯度算法[20],将对偶变量进行迭代逐步更新达到最优。用k表示迭代次数,α(k)表示迭代步长,则对偶变量的更新公式为:
(11)
(12)
(13)
(14)
其中,{·}+表示取正值运算(也可以表示为x=max{0,x})。
原始变量的更新公式为:
(15)
(16)
(17)
(18)

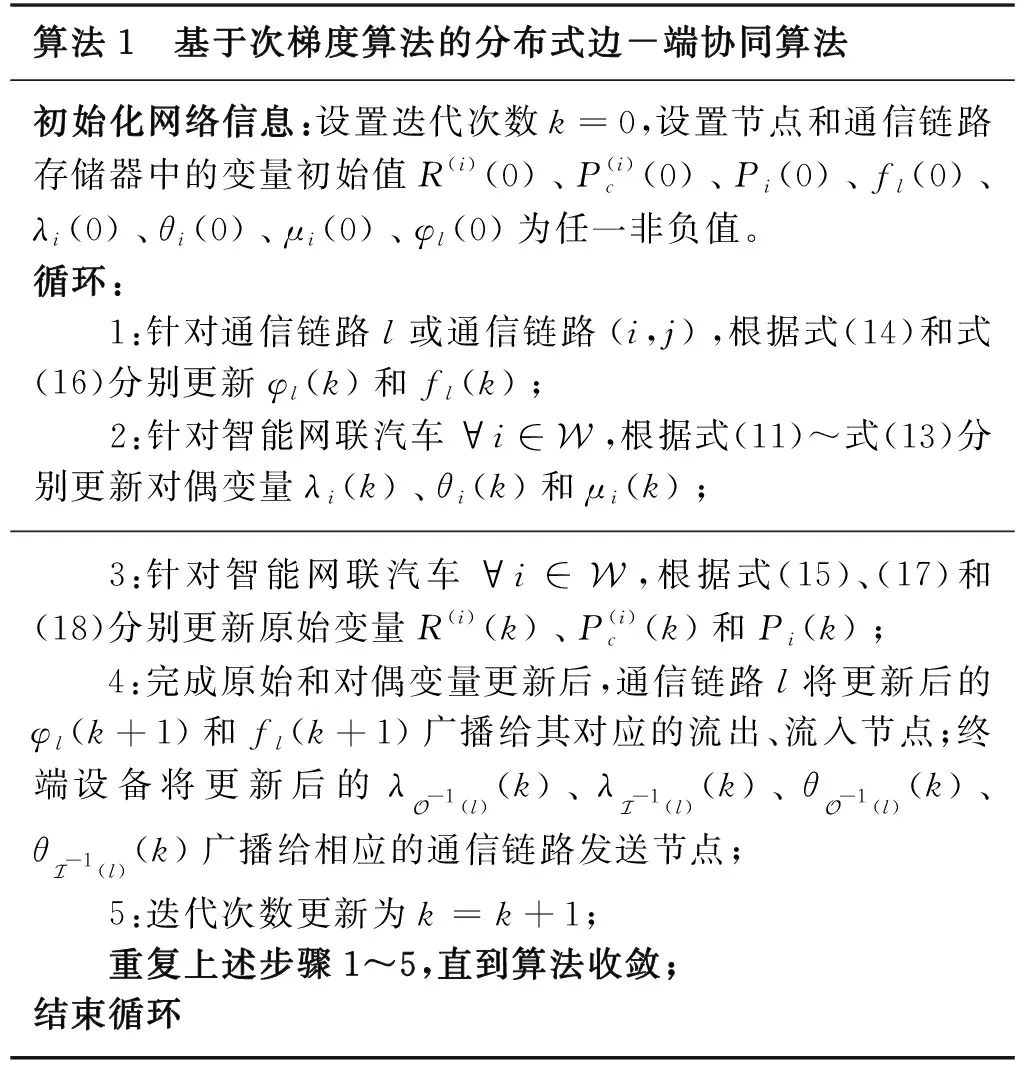
算法1 基于次梯度算法的分布式边-端协同算法初始化网络信息:设置迭代次数k=0,设置节点和通信链路存储器中的变量初始值R(i)(0)、P(i)c(0)、Pi(0)、fl(0)、λi(0)、θi(0)、μi(0)、φl(0)为任一非负值。循环: 1:针对通信链路l或通信链路(i,j),根据式(14)和式(16)分别更新φl(k)和fl(k); 2:针对智能网联汽车∀i∈ ,根据式(11)~式(13)分别更新对偶变量λi(k)、θi(k)和μi(k); 3:针对智能网联汽车∀i∈ ,根据式(15)、(17)和(18)分别更新原始变量R(i)(k)、P(i)c(k)和Pi(k); 4:完成原始和对偶变量更新后,通信链路l将更新后的φl(k+1)和fl(k+1)广播给其对应的流出、流入节点;终端设备将更新后的λ -1(l)(k)、λ -1(l)(k)、θ -1(l)(k)、θ -1(l)(k)广播给相应的通信链路发送节点; 5:迭代次数更新为k=k+1; 重复上述步骤1~5,直到算法收敛;结束循环
4 仿真实验和分析

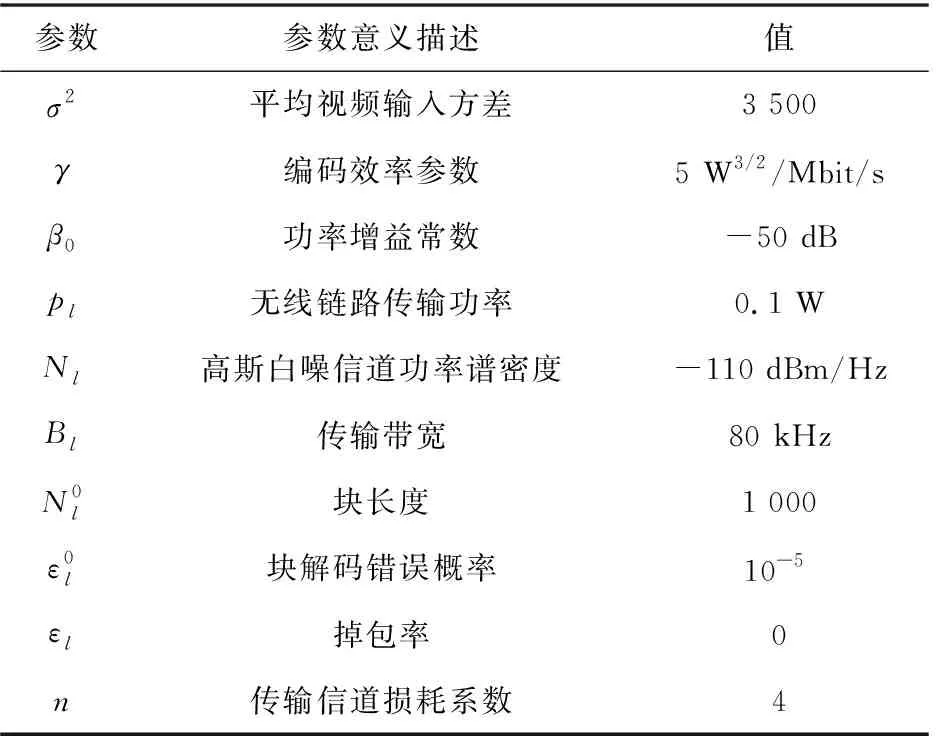
表1 具体参数设置
图3和图4分别显示了提出的算法对于智能网联汽车视频压缩和通信总能耗、编码后数据速率的迭代性能,由图可知,大约在200次迭代后达到最优。因此,本算法能在较短的时间内达到性能稳定状态,能够满足车联网场景下拓扑结构快速变化的需求。同时,针对优化目标,即保证单个车辆的能耗公平性,图3中的仿真结果显示,在迭代达到最优状态时,每辆智能网联汽车的视频压缩和通信总能耗非常接近(如表2所示)。因此,本算法能够达到保证单个车辆的能耗公平性的目标。
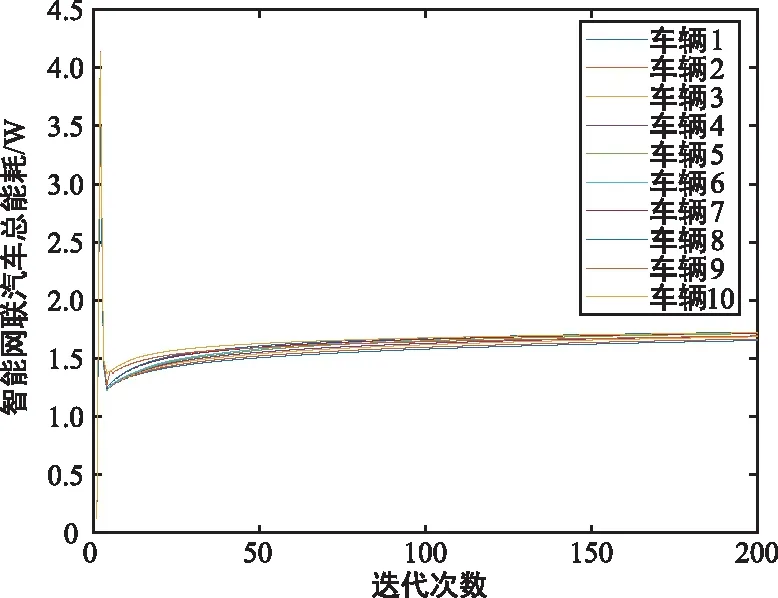
图3 智能网联汽车视频压缩和通信总能耗的迭代性能Fig.3 Iteration performance of the total power consumption due to video compression and communications of intelligent connected vehicles
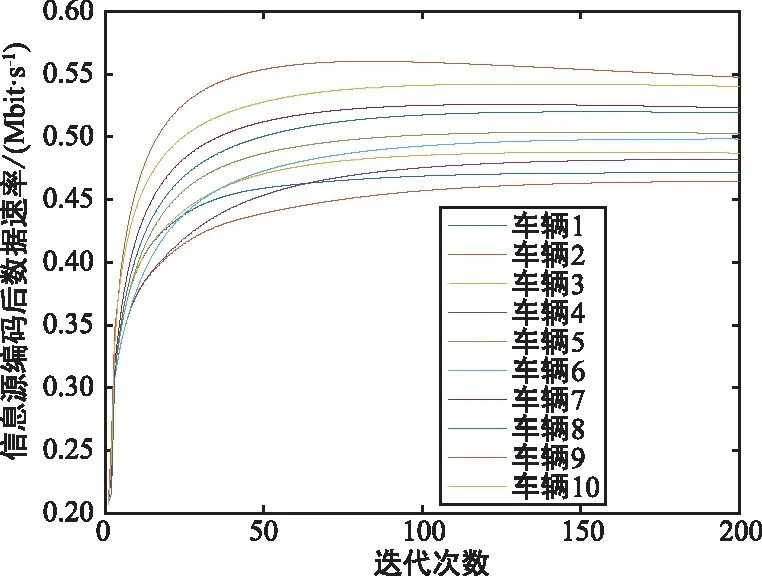
图4 智能网联汽车编码后数据速率的迭代性能Fig.4 Iteration performance of the encoding data rate of intelligent connected vehicles

表2 算法收敛后每辆智能网联汽车的视频压缩和通信 总能耗
图4还表明承担中继数据任务较重的车辆会使用较低的视频压缩能耗(由视频失真率模型式(1)可知,因此该车辆编码后数据速率较大),由此利用较多的能耗用于数据接收与传输。
为了比较提出算法的性能,将其与每辆智能网联汽车直接与基站通信机制下的性能进行对比,结果如图5所示。在智能网联汽车直接与基站通信的机制下,每辆智能网联汽车的视频压缩和通信总能耗差别较大,即距离基站较近的智能网联汽车的视频压缩和通信总能耗较小。这是因为距离基站较近的智能网联汽车具有较好的传输信道信噪比,可以利用更少的通信能耗支持更大的数据传输速率。同时,根据视频失真率模型式(1),在视频质量要求相同的情况下,更大的数据速率需要的视频压缩能耗更小。
将图5中的结果进行对比,在智能网联汽车距离基站较近的情况下(如车辆7~10的结果所示),车到基站直连传输机制所需的视频压缩和通信总能耗比本文得到的视频压缩和通信总能耗更小。本文算法考虑边-端协同机制,距离基站较近的智能网联汽车以数据中继的方式协助距离基站较远的智能网联汽车进行数据传输,因此导致了更多的能耗。如图5所示,对于距离基站较远的智能网联汽车(如车辆1~6),大大降低了其视频压缩和通信总能耗。因此,本文算法能够通过边-端协同,保证单个车辆的能耗公平性。

图5 本文算法与车到基站直连传输机制总能耗对比Fig.5 Comparison on total power consumption of intelligent connected vehicles due to video compression and communications by the proposed algorithm
在本文算法的边-端协同机制下,部分距离基站较远的智能网联汽车不与基站直接通信,而是利用其他智能网联汽车,通过多路径多跳路由的方式进行数据传输。因此,本算法还可以减少车到基站直连通信的链路数量,从而节省通信带宽资源(一般而言,车到车通信链路的带宽资源可以进行复用)。
5 结束语
本文提出了一种基于次梯度算法的分布式边-端协同算法,通过调整视频编码码率、信息源传输速率,以及车辆多路径路由决策,实现资源分配策略。该算法可以部署在每辆智能网联汽车中执行,并且只需要与其相邻节点(智能网联汽车或基站)交换少量信息。
仿真实验结果和分析表明,本算法能在较短的时间内达到性能稳定状态,能够满足车联网场景下拓扑结构快速变化的需求;同时,相比于每辆智能网联汽车直接与基站通信的机制,本算法能保证单个车辆的能耗公平性,并提高网络资源利用率。
猜你喜欢
中国交通信息化(2022年9期)2022-11-19
昆钢科技(2022年2期)2022-07-08
当代水产(2021年10期)2022-01-12
移动通信(2021年5期)2021-10-25
建材发展导向(2021年23期)2021-03-08
空间科学学报(2020年3期)2020-07-24
电子制作(2019年20期)2019-12-04
电子制作(2019年11期)2019-07-04
汽车观察(2018年12期)2018-12-26
华人时刊(2018年15期)2018-11-10