
基于自然驾驶数据的典型风险场景致因分析 *
2022-02-10 01:44冯树民孙雅丽
重庆交通大学学报(自然科学版) 2022年1期
冯树民,吴 迪,孙雅丽
(哈尔滨工业大学 交通科学与工程学院,黑龙江 哈尔滨 150090)
0 引 言
城市交通系统中各种影响因素非线性交互作用是形成危险工况的主要原因,研究其相互影响关系有助于针对性地制定主动防控策略,保证城市交通安全。目前国内外学者已采用自然驾驶数据展开了场景风险评估,并对驾驶者紧急驾驶行为、特定人群的驾驶风险变更等进行了相关研究[1-4]。然而,针对于危险工况影响因素的研究相对较少,LV Bin等[5]使用美国公路战略研究项目(SHRP)中的自然驾驶数据,分析了不同因素对驾驶者在交叉路口右转时分心驾驶行为的影响;T.A.DINGUS等[6]使用由美国国家科学院资助的ND数据集,对交通事故及其诱因进行了相关性统计分析;A.HABIBOVIC等[7]使用改进的DREAM分析了日本的一项自然驾驶数据,结果表明:在交叉口范围内危险工况诱导因素主要为驾驶者视线遮挡和注意力分散;杨春风等[8]对驾驶员违法驾驶行为与交通事故的4项指标进行了相关性分析,利用改进灰色关联度模型对各项驾驶行为与交通事故指标的关联程度进行评价;王涛等[9]设计了电动自行车的风险驾驶行为量表,探究得到了与驾驶信心、安全态度、风险感知以及风险驾驶行为相关联的多项影响因素;吴斌等[10]应用修正的DREAM分析了China-FOT中汽车直行追尾危险工况的相关数据,研究发现:中国驾驶者的驾驶习惯与欧美有较大差别,直行追尾危险场景中最主要的深层诱导因素为驾驶者的不良驾驶习惯;王永岗等[11]构建基于工作满意度、鲁莽驾驶和违章驾驶与事故倾向的结构方程模型,研究获取了驾驶行为影响因素与事故倾向间的相关关系。
以上研究表明,危险驾驶工况影响因素存在着时间和地域的差异性。现阶段基于自然驾驶数据分析影响因素的研究主要集中于工况与致因的相关性统计分析,未能系统地挖掘影响因素之间的相互作用、方向及强度大小。
笔者以实车采集的自然驾驶数据为基础,通过视频回放、数据筛选等得出包括驾驶者自身、道路条件及管制条件等在内的20个影响因素。选定机动车与行人及非机动车冲突、前车变道两类典型风险工况,使用关联规则改进的DEMATEL-ISM模型对影响因素进行分析,得到了两类工况的影响因素矩阵,进而分析两类风险工况下各个致因的相对重要性。
1 影响因素数据集建立
1.1 自然驾驶数据采集
自然驾驶研究(NDS)方法是一种驾驶数据采集方法,其特点是通过先进的车载仪器连续采集驾驶者、车辆及驾驶环境等详细数据[12]。
笔者所使用的自然驾驶数据为哈尔滨城市道路自然驾驶试验数据,选取14名(男9名,女5名)25~40岁的驾驶者开展实车试验,所有参与者均为笔者单位职工。采用大众速腾(手动挡)作为试验车型,安装速度传感器、角度传感器、加速度传感器等车辆测试设备。驾驶者全程佩戴眼动仪,沿着哈尔滨市主城区黑龙江省图书馆—华山路—淮河路—宣化街—宽城街—滨江街—南二十道街—松浦大道—中源大道的路线进行试验。
试验仪器采样频率为50 Hz,采集车辆行驶速度、三轴加速度、方向盘转角、驾驶者视线轨迹等数据,用于辨析道路状况和交通管制等相关因素。驾驶全程录像,可回放车辆外部环境状况、驾驶者驾驶状况,为进一步分析驾驶状况和驾驶行为相关指标提供技术依据。图1为Ergo LAB 科研集成系统数据处理界面,可显示车辆外部环境录像和车内驾驶人行为录像并同步处理相关数据;图2为选取的哈尔滨城市实车试验道路路线。

图1 Ergo LAB 科研集成系统数据处理界面Fig. 1 Data processing interface of Ergo LAB

图2 实车试验道路路线Fig. 2 Road map of real vehicle test
1.2 影响因素提取
从采集到的自然驾驶数据中提取风险工况并分析影响因素。近些年,在道路碰撞事故影响因素中,车辆故障、道路设计缺陷等占比越来越低[13]。因此,笔者基于实车试验中的车辆速度及加速度大小进行风险工况提取,设定提取条件[14]为:纵向加速度±1.5 m/s2,横向加速度±1.5 m/s2。
经过数据筛选共获得驾驶风险场景268例,通过分析驾驶危险工况发生前后的视频等相关数据,主要从驾驶人状态、驾驶人行为、道路状态、交通管制这4个方面提取共20个影响因素。各因素及描述如表1。
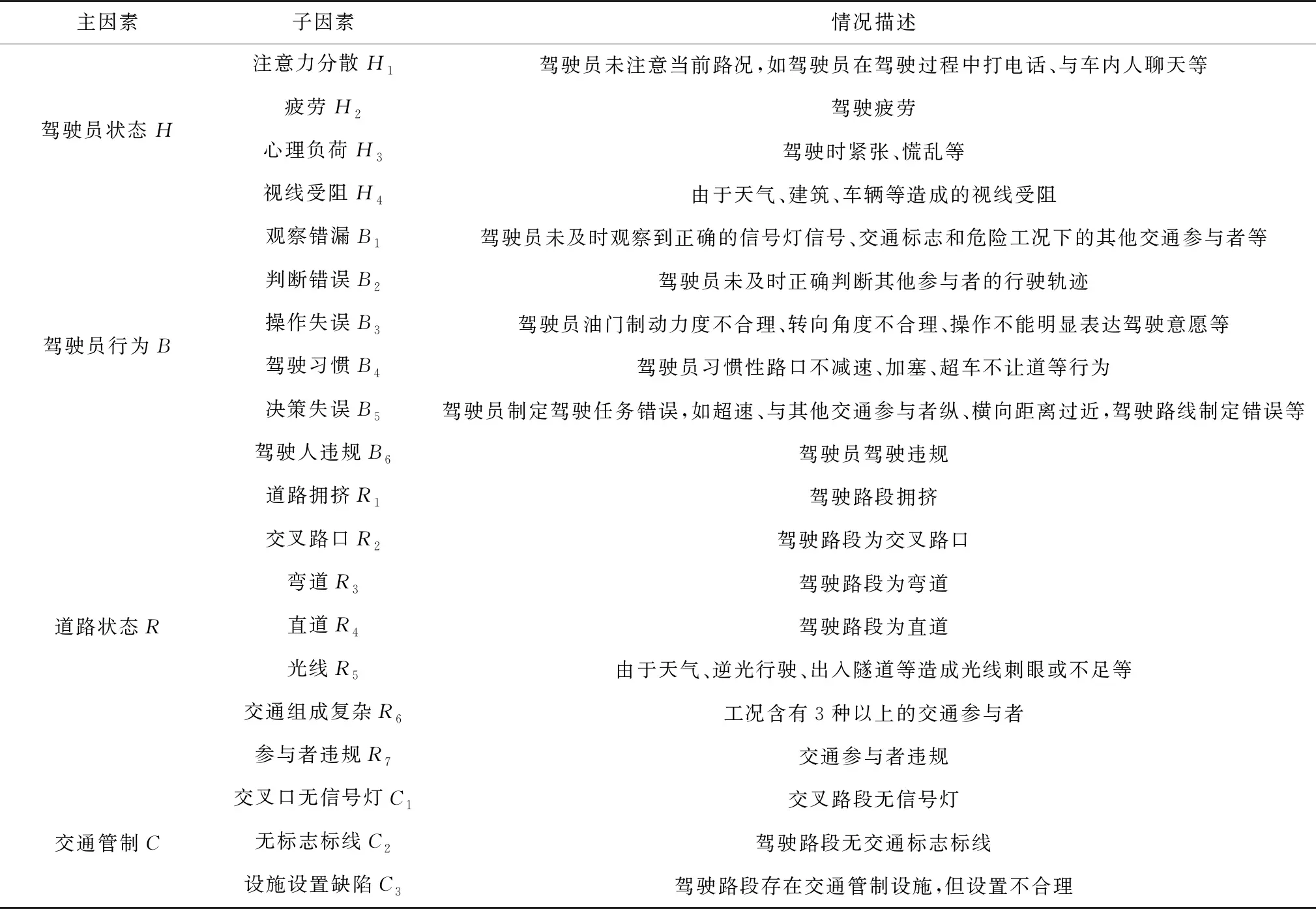
表1 驾驶危险工况影响因素Table 1 Influencing factors of dangerous driving conditions
1.3 数据集建立
基于筛选出的驾驶危险工况,分析每条工况时间节点前后的自然驾驶数据,判断该危险工况下存在的影响因素。经逐一判断,即可得到数据集矩阵D,数据集为n×m的[0-1]矩阵,如式(1):
(1)
式中:n为每类驾驶危险工况的个数;m为影响因素的个数;Sij为在第i个危险工况下第j个影响因素是否存在,若存在则编码为“1”,否则为“0”。
2 改进的DEMATEL-ISM模型
DEMATEL-ISM模型常被用来识别复杂系统内部元素之间的相互关系及影响机理[15-17],但由于模型构建基础多为德尔菲法,导致研究结论主观性过强。笔者基于城市交通系统危险工况的影响因素数据集,使用关联规则发现:Apriori算法改进了DEMATEL-ISM模型,消除模型的主观性。具体步骤如图3。

图3 改进的DEMATEL-ISM模型Fig. 3 Improved DEMATEL-ISM model
2.1 确定直接影响矩阵
使用Apriori算法对数据集进行关联规则发现,关联规则置信度可反映影响因素之间的相互影响方向及强度,因此,可依据关联规则置信度大小确定DEMATEL的直接影响矩阵。直接影响矩阵R内的元素值rij如式(2):
(2)
式中:Conf(Si→Sj)为关联规则Si→Sj的置信度;Si、Sj分别为影响因素,i≠j。
2.2 计算综合影响矩阵
根据直接影响矩阵R计算规范化直接影响矩阵R*如式(3):
(3)
综合影响矩阵T可近似表示如式(4):
T=R*(I-R*)-1
(4)
式中:I为单位矩阵。
2.3 确定阈值化综合影响矩阵及邻接矩阵

(5)
(6)
取不同的阈值进行分析。当阈值φ为综合影响矩阵T内所有非零元素的中位数时,获得的层次结构图最优。
2.4 确定影响因素层级归属
依据邻接矩阵C计算可达矩阵M,如式(7):
M=(C+I)n+1=(C+I)n≠…≠(C+I)1
(7)
基于可达矩阵,归纳各影响因素之间影响关系和被影响关系,依据式(8)可确定影响影子层级归属:
R(Si)∩A(Si)=R(Si)
(8)
式中:Si为可达矩阵中的元素;R(Si)为Si的可达集,即Si影响元素所构成的集合;A(Si)为Si的先行集,即影响Si元素所构成的集合。
依据式(8),对可达矩阵中元素的最高层级要素进行递归性地筛选,确定影响因素层级归属。
2.5 绘制加权层次结构图
将阈值化综合影响矩阵T*中元素值赋值于各层级的影响因素之间,使用复杂网络分析软件Pajek绘制驾驶危险工况加权层次结构图并进行分析。
3 实例分析
对筛选出的268例危险工况进行分析,剔除无效场景,筛选共得到行人和非机动车横向冲突(机动车-非机动车/行人冲突)场景、前车变道冲突(机动车-机动车冲突)场景共117例,其中:行人和非机动车冲突场景51例、前车变道冲突场景66例。
构建两类典型工况数据集,设置TMinsup=0.1,TMinconf=0.2;使用Apriori算法进行一般关联规则数据挖掘,只关注两个影响因素之间的关联规则。经统计,行人和非机动车侧向冲突场景数据集共发现56条关联规则,前车变道危险场景数据集共发现45条关联规则。基于此,使用改进DEMATEL-ISM模型对两类驾驶危险工况影响因素的相互关系进行描述、分析和比较。
3.1 冲突场景
3.1.1 工况1-行人和非机动车横向冲突场景
行人及非机动车冲突场景主要为在自然驾驶过程中,车辆保持直行与横穿时与行人或非机动车发生显著冲突,如图4。

图4 行人及非机动车冲突场景示例Fig. 4 Pedestrian and non-motor vehicle conflict scene example
基于Apriori算法,挖掘出该类工况影响因素之间的关联规则。依据模型确定机动车-行人和非机动车危险工况下影响因素直接影响矩阵R工1,如式(9):
(9)
经模型处理后,加权层级结构如图5。图5中:不同灰度表示不同层级,线值表示不同影响强度。
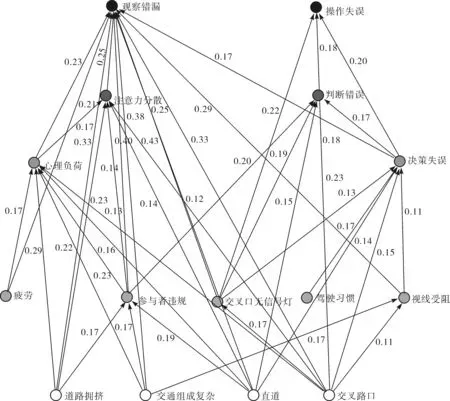
图5 行人及非机动车冲突场景影响因素加权层次结构Fig. 5 Weighted hierarchy chart of influencing factors in pedestrian and non-motor vehicle conflict scenarios
3.1.2 工况2-前车变道风险场景
前车变道冲突场景主要为在自然驾驶过程中前车突然变道驶入本车车道与驾驶车辆产生冲突,如图6。
基于Apriori算法,挖掘出的该类工况影响因素的关联规则,依据模型确定影响因素的直接影响矩阵R工2,如式(10):
(10)

图6 前车变道危险场景示例Fig. 6 Example of dangerous scene of lane change of front vehicle
3.2 影响因素度值分析
机动车-机动车危险工况影响因素加权层次结构如图7。基于图7使用复杂网络分析软件Pajek进一步分析各影响因素及相互关系[18]。在加权层次结构图中,线值表征着影响因素之间相互作用大小,故可使用复杂网络中顶点的加权度值分析各个影响因素的相对重要性,使用线值分析双因素之间的影响程度。
3.2.1 单因素度值分析
经Pajek分析,提取两类工况层次结构图中加权出、入度值最大的5个致因和中心度、原因度度值总占比70%以上的致因,如表2、表3。
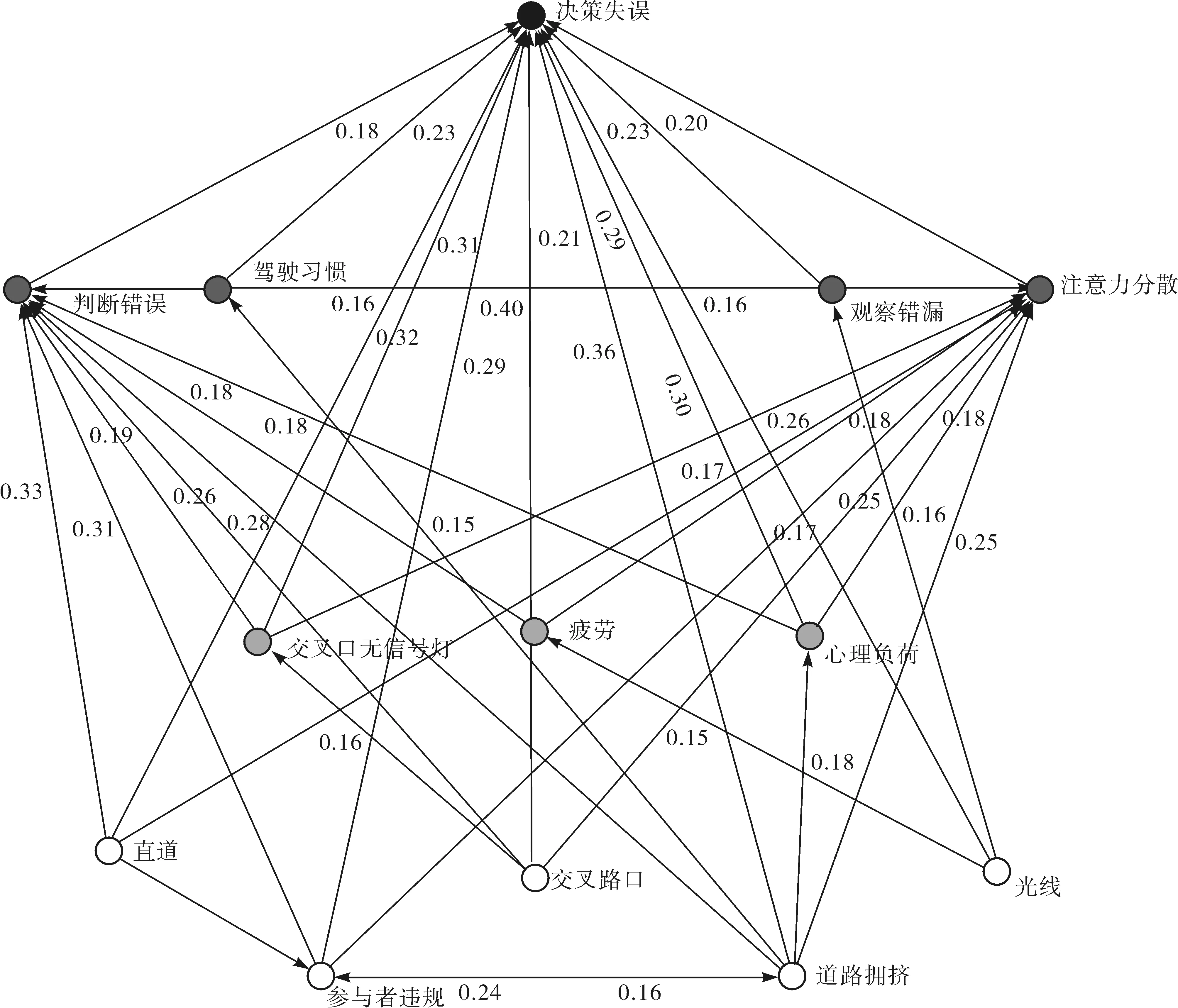
图7 前车变道冲突场景影响因素加权层次结构Fig. 7 Weighted hierarchy chart of influencing factors in dangerous scene of lane change of front vehicle
工况1中:占核心地位的致因,主要为观察错漏、心理负荷、参与者违规,特别是驾驶员观察错漏的中心度值(3.28)是其他影响因素的2倍以上。这表明在行人及非机动车冲突场景中,关键诱导因素为驾驶员未能及时观察到正确的交通状况如其他交通参与者、交通标志和信号灯等,此外驾驶员紧张情绪及其他交通参与者的违规行为也是造成该类风险场景的重要因素。

表2 两类工况影响因素加权出入度值比较Table 2 Comparison of weighted access degree of influencing factors under two kinds of working conditions
加权出度值为从顶点向外扩散的所有线值之和;加权入度为从外部向顶点聚集的所有的线值之和。表3为以中心度为顶点的出度值和入度值之和,原因度为顶点出度值和入度值之差。中心度表征影响因素在结构图内的重要性及复杂性大小。原因度区分工况内的深层诱导因素和直接影响因素。当原因度为正值时,元素为深层诱导因素,否则为直接影响因素。从表3可知:两类工况中致因的重要度排序并不相同。
工况2中:占核心地位的致因主要为决策失误、判断错误、注意力分散,特别是驾驶员决策失误的中心度值(3.33)是其他影响因素1.5倍以上。这表明在前车变道风险场景中,关键诱导因素为驾驶员制定了错误的驾驶任务,如驾驶速度过快、驾驶车辆与前车距离过近等;此外驾驶员未能正确地判断前方车辆行驶轨迹及驾驶员在驾驶过程中分心也是造成该类风险场景的重要因素。

表3 两类工况影响因素中心度、原因度比较Table 3 Comparison of core degree and cause degree of influencing factors under two kinds of working conditions
依据表3可知:① 两类工况的深层诱导因素大致相同,其中在原因度最大的5个元素中,直道与交叉路口均为客观路段形态,表明在城市交通中,相比于直道而言,工况1更容易发生在交叉路口;而工况2发生在交叉路口和直道的概率大致相同。② 两类危险工况的直接影响因素存在显著差异,工况1直接影响因素为观察错漏、心理负荷、操作失误;工况2直接影响因素为决策失误、判断失误和注意力分散。
3.3.2 双因素线值分析
对层次结构图内的线值从大到小进行排序并筛选,提取两类工况中线值最大的10组影响因素,如表4。
线值表征的是影响因素影响程度大小。由表4可知:
1)工况1中,线值最大的弧中有80%指向观察错漏,除直道与交叉路口两个客观道路形态因素之外,具体有交通组成复杂、参与者违规、道路拥挤、视线受阻、注意力分散和交叉口无信号灯,道路状态因素占主要部分。
2)工况2中,线值最大的弧中有70%指向决策失误,除直道与交叉路口两个客观道路形态的因素之外,具体有道路拥挤、交叉口无信号灯、光线、心理负荷、参与者违规,道路状态因素占主要部分。
线值分析结果与中心度值一样,表明两类工况中最高影响因素分别为观察错漏和决策失误。在网络中受其他影响因素影响较大,需从多方面考虑才可消除对驾驶危险工况影响,尤其是道路状态方面因素。

表4 两类工况双因素线值比较Table 4 Comparison of linear values under two kinds of workingconditions
综合以上分析,交叉路口与直道在两类工况影响因素内的重要性及层级几乎一致,由于它们属于客观的道路路段形态,暂时将其撇除,将剩余的因素归纳如表5。
由表5可知:两类工况深层诱导因素大致相同,均属于道路状态因素;直接影响因素均属于驾驶员状态和驾驶员行为主因素,但具体因素存在显著差异。由此可将危险场景的形成链路归纳如下:在工况1中,驾驶员往往因路况复杂等原因造成心理压力过大,无法及时正确地观察到行人与非机动车或不能向行人及非机动车正确表达自己的行车意愿,进而形成危险工况;工况2中,驾驶员往往因拥挤的路况、光线(天气原因或其他原因造成光线过强或不足)和交叉口信号设施缺失等问题,不能正确地判断前方车辆运动轨迹,制定了错误的驾驶任务如驾驶车辆速度过快、跟车距离过近等,进而形成危险场景。此外,这两类工况核心影响因素同样应该引起重视,往往在影响因素之间的影响链路中占据重要位置,如工况1中的心理负荷和参与者违规。

表5 两类工况影响因素归纳Table 5 Induction of influencing factors of two kinds of workingconditions
4 结 论
1)分析了危险工况内在产生机理并从驾驶员状态、驾驶员行为、道路状态、交通管制这4个方面提取出20组相关影响因素,获取了各因素之间的层次结构及作用强度。
2)基于Apriori算法对影响因素数据集的关联规则,替代原有专家打分机制,对DEMATEL-ISM模型进行改进,构建了新的风险因素评价体系,消除了原有模糊评价的主观性。
3)针对行人和非机动车横向冲突、前车突然变道冲突这两类典型场景,分别构建了驾驶风险因素矩阵,通过图论分析,比较了这两类场景下各因素影响程度。通过对各个影响因素度值深入分析表明:哈尔滨城市中两类风险场景深层诱导因素大致相同,但直接影响因素存在显著差异,导致危险工况发生的主要来源分别为“驾驶员心理负荷过高导致观察错漏”和“驾驶员预判错误导致决策失误”。故提高驾驶员的危险感知能力是保证城市交通安全的重要途径。
猜你喜欢
汽车工程学报(2022年5期)2022-10-12
汽车实用技术(2022年14期)2022-07-30
煤气与热力(2022年4期)2022-05-23
汽车实用技术(2022年7期)2022-04-20
汽车实用技术(2022年4期)2022-03-07
舰船科学技术(2021年12期)2021-03-29
汽车工程(2021年12期)2021-03-08
读与写·教育教学版(2017年10期)2017-11-10
中学科技(2015年11期)2015-11-25
南都周刊(2015年4期)2015-09-10
