
机器人辅助腹腔镜保留肾单位手术的临床应用进展
2022-01-28 09:23:52王成燃姜金兰谷欣权
中国实验诊断学 2022年1期
王成燃,姜金兰,谷欣权*
(1.吉林大学中日联谊医院 泌尿外科;2.吉林大学中日联谊医院 科学研究中心,吉林 长春130033)
保留肾单位手术(nephron sparing surgery,NSS)是一种治疗肾肿瘤的手术方式,在肾癌的治疗中应用广泛。肾部分切除术(partial nephrectomy,PN)最初仅限于治疗双侧肾癌、孤立肾肾癌或对侧肾功能不全的肾癌。现为了保护正常肾单位以及维持良好的肾功能得以广泛应用于肾癌的治疗。研究发现其能达到与根治性肾切除(radical nephrectomy,RN)相同的治疗效果,已被记载为T1期肾癌的标准治疗方案。1993年腹腔镜肾部分切除术(laparoscopic partial nephrectomy,LPN)首次被报道[1],随着腹腔镜技术的临床应用,其在确保疗效的同时又能缩短愈合时间,但操作难度及要求精湛的切割与缝合技术给术者带来了诸多挑战。达芬奇(Da Vinci)机器人手术系统的出现将微创技术带领进入新的时代,在全世界范围内迅速推广使它迅速成为热门话题。术中可视化的3D视野和灵活简便精准的操作弥补了传统腹腔镜学习曲线长等不足,它在术中出血量(estimated blood loss,EBL)、热缺血时间(warm ischemia time,WIT)、手术时间(operative time,OT)、平均住院日(length of stay,LOS)、并发症等问题方面也展现出优势,同时也为远程手术理念提供了实践基础。本综述旨在阐明达芬奇机器人辅助腹腔镜肾部分切除术(robot-assisted partial nephrectomy,RAPN)的技术应用。
1 Da Vinci机器人手术系统
Da Vinci机器人手术系统具备高清3D视野、七个自由度的操作机械臂、震颤过滤、人机分离操作等特点。其中高清3D视野及灵活的操作可以展示最佳的解剖层面以及呈现精准的手术切缘效果,能快速精准地切除肿瘤[2]。机器人手术系统曾率先开展于微创泌尿系统领域,美国学者Gettman于2004年完成并报道了世界上首例RAPN。经过经验的积累与机器的革新,Da Vinci手术系统已趋于成熟,力反馈问题得到了极大改善[3]。机械臂更灵巧、纵向长度更长及活动范围更广可减少手术视野盲区。吲哚菁绿静脉注射结合3D重建及近红外荧光成像技术,运用现实增强技术将显影图像与术中图像重叠,提升了手术效果。肿瘤具有缺乏显示吲哚菁绿(ICG)的特点则利于肿瘤及其边界被识别,很好地区分肿瘤边缘、脂肪坏死及囊肿等。此外,其对肾脏血管的显影能进行“超选择性动脉阻断”,既控制术中出血量又得以保护肾功能。短时间内完整切除肿瘤的同时又降低了切缘阳性率,最大程度保留肾组织。
机器人手术可以不受距离的限制,进行远程手术,打破了手术台旁的传统模式。2001年,一名法国女性接受了来自美国医生的远程达芬奇辅助腹腔镜胆囊切除术[4]。这项报道标志着跨大区域实时手术的可行性,整个过程系统延迟仅155毫秒。近年来,单孔机器人[5]应用于临床也被报道,除了能加快术后康复、减轻疼痛及增加美观等,经验丰富的术者更能取得良好的手术效果[6]。一项关于单孔与多孔机器人手术疗效的对比研究发现,多孔手术在OT、WIT、术后eGFR、切缘阴性率及并发症的发生等方面显然优于单孔[5]。就目前的分析,单孔机器人手术的应用范围仍是有限。
2 肾肿瘤评分系统
2.1 R.E.N.A.L.评分系统
R.E.N.A.L.评分系统是2009年由国外学者Kuikov A[7]首次提出的肾肿瘤评分标准,该系统根据影像学图像对肾肿瘤的5个解剖学特征量化。分别是肿瘤最大直径、外生型/内生型比例、肿瘤与集合系统的距离、腹侧/背侧、肿瘤与两条平行线的关系。研究显示,低、中度复杂的肾肿瘤多采用损伤性小的手术方式,而复杂的肾肿瘤大多数行根治性肾切除术。该评分对于术前评估肾肿瘤及手术方式的选择意义重大。此外,R.E.N.A.L.评分与热缺血时间呈正相关性,评分越高,表示肿瘤越复杂,术中热缺血时间则越长,见表1,图1、2。
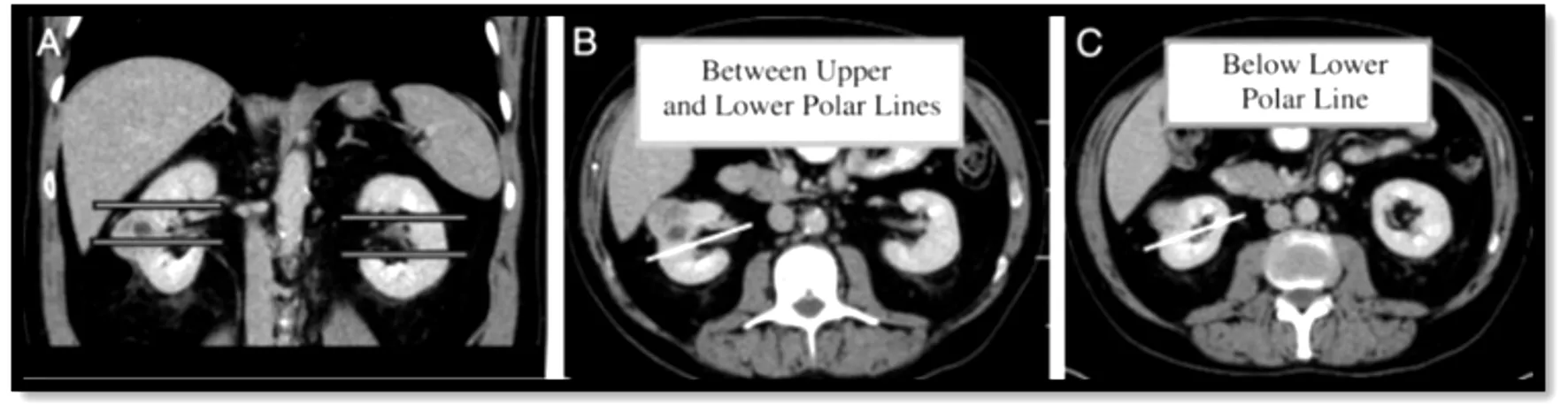
图1 白线沿肾门将肾脏平分[7]
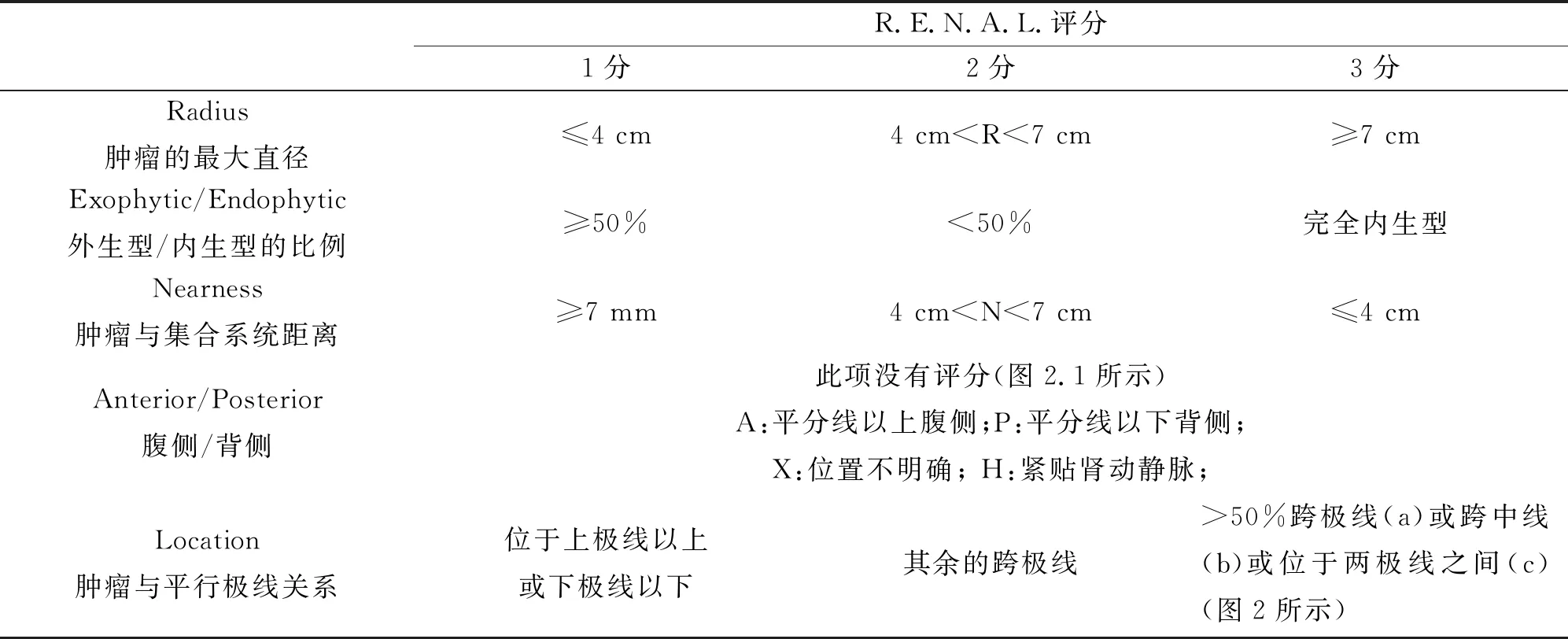
表1 R.E.N.A.L.评分系统[7]
2.2 P.A.D.U.A.评分系统
P.A.D.U.A.评分系统(preoperative aspects and dimensions used for an anatomical)是由学者Ficarra[8]提出的评分系统,是根据肿瘤的解剖位置判断其复杂性,整体评估肿瘤的前后、纵向位置,肿瘤与肾门的关系,肿瘤与集合系统的关系及肿瘤侵入肾实质的程度。其评分与并发症发生率呈正相关,中高度复杂的肾肿瘤术中及术后并发症发生率分别较低度升高14倍和30倍,见表2,图3。
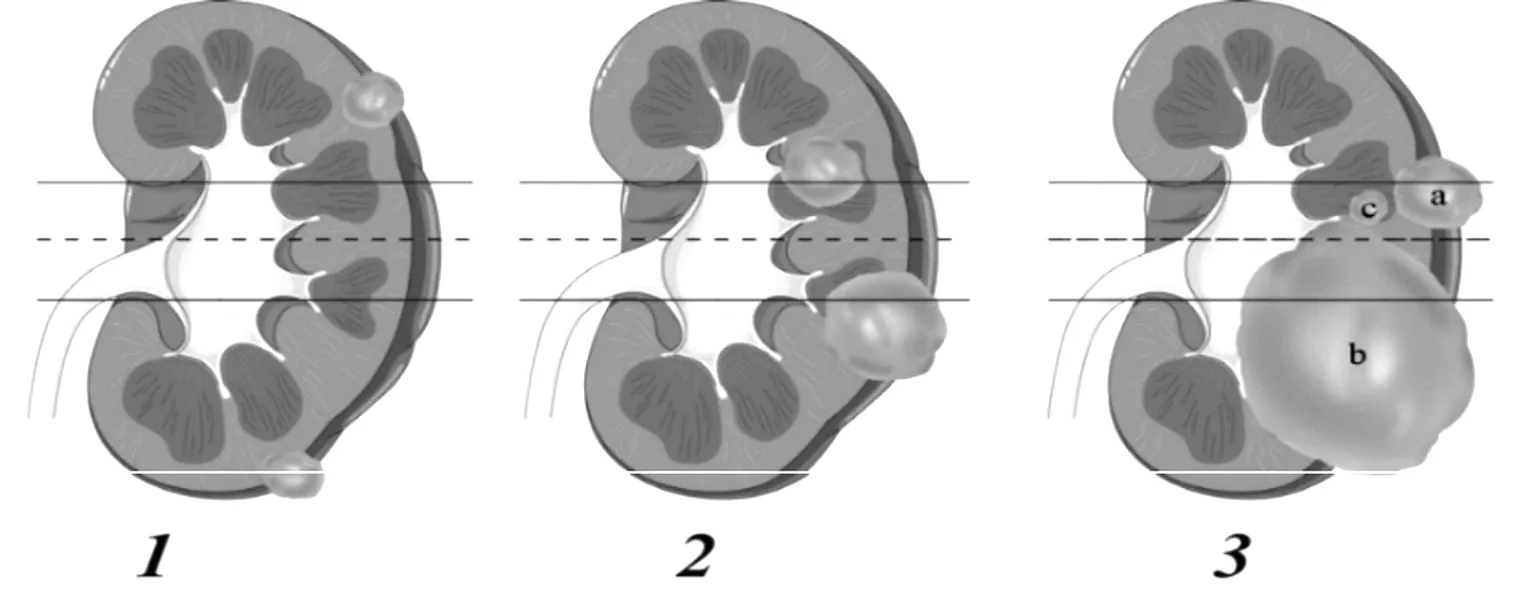
图2 a:>50%跨极线;b:>50%跨中线;c:>50%位于两线间[7]
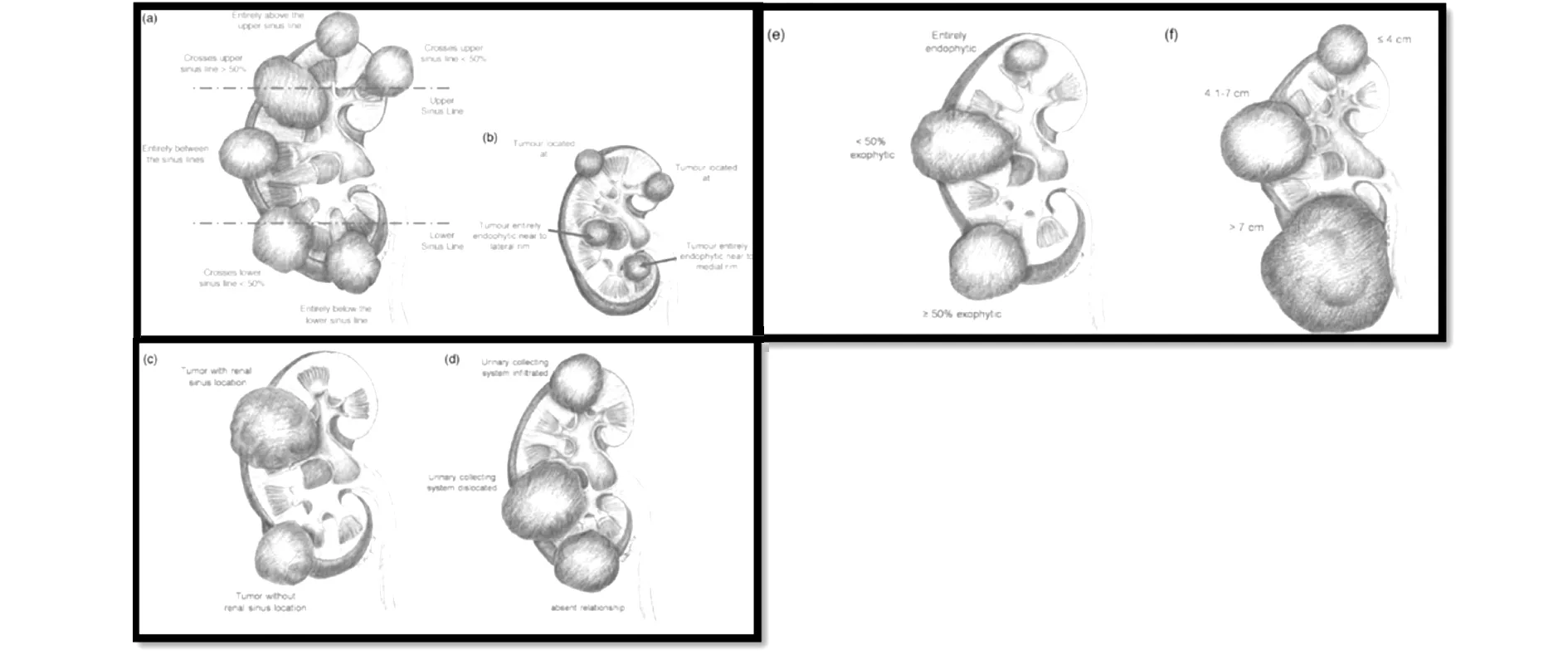
(a)肿瘤的纵向分类;(b)肿瘤的边缘位置;(c)肿瘤与肾窦的关系;(d)肿瘤与集合系统的关系;(e)肿瘤侵入实质的比例;(f)肿瘤的最大直径
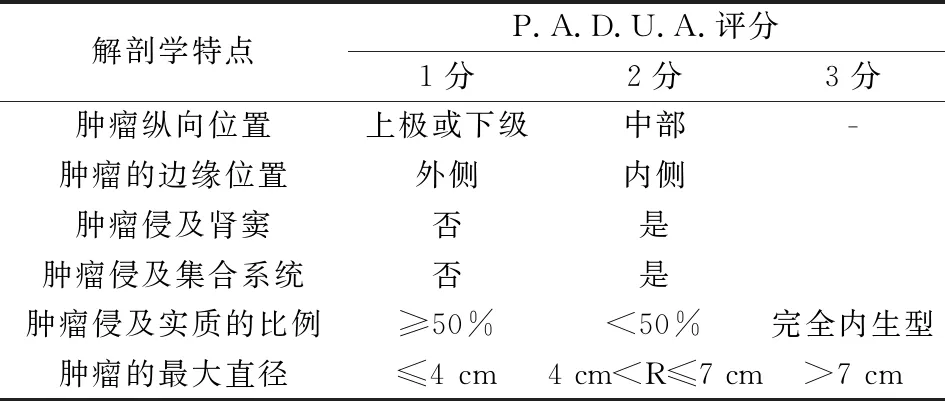
表2 P.A.D.U.A.评分系统[8]
2.3 向心性指数
向心性指数(C-index)是由Prof.Simmons[9]提出的量化肾肿瘤与肾盂关系的方法。其中涉及到肿瘤大小和向心性这两个最重要的指标。术前需行薄厚层为5 mm的增强肾CT检查以建立模型。其中,中心层面为上下两层面序列数之和的平均值。确定中心层面后,在此层面的影像图片上沿肾脏的边缘勾勒,大致可勾画出一个椭圆,而椭圆的中心即为肾脏平面中心。测量出肿瘤最大直径的所在平面为肿瘤中心层面。CI值越大,肿瘤越远离集合系统及肾动静脉,行肾部分切除术的可能性越大,术中术后并发症发生率也越小,见图4。
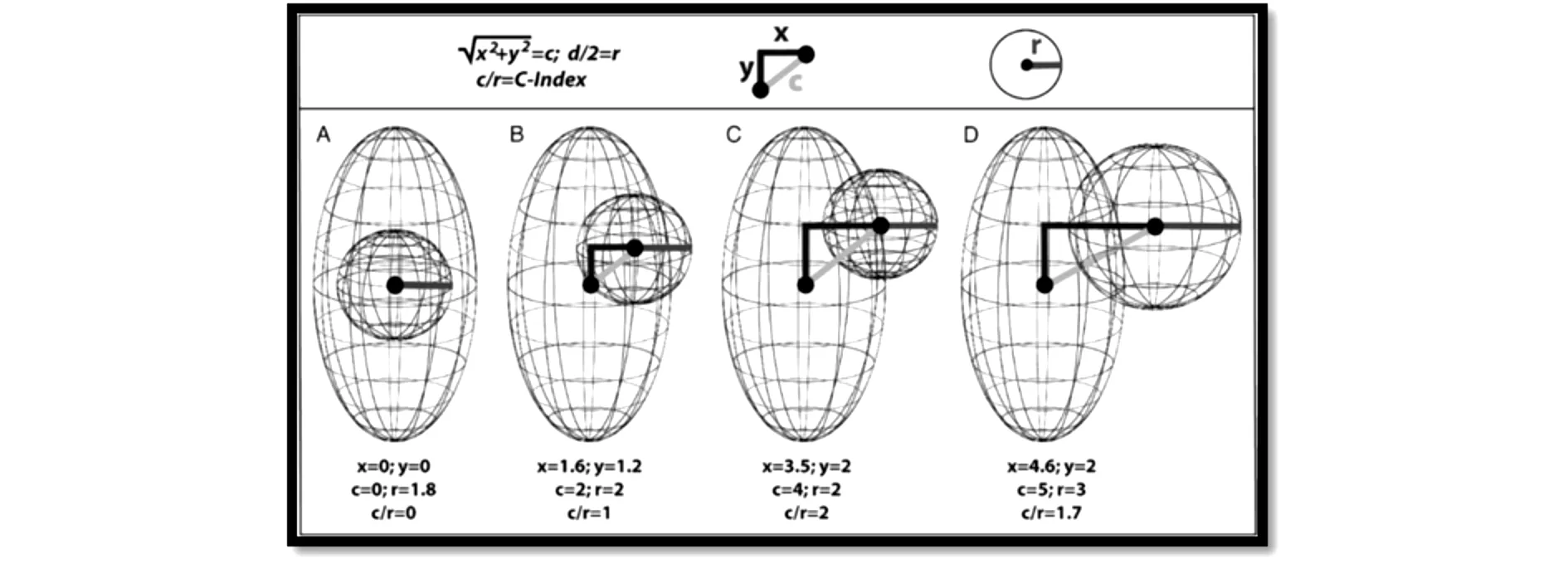
图4 C-Index模型图[9]
3 手术适应症
RAPN可用于治疗T1a期肾肿瘤。操作技巧的掌握促进了RAPN应用于各类复杂性肾肿瘤,其中包括肾门处肿瘤,内生性肿瘤,巨大肿瘤(≥10 cm),孤立肾肿瘤,单侧或双侧单发、多发肿瘤,以及肾部分切除术后肿瘤原位复发等。对于复杂性肾肿瘤实施RAPN并未广泛开展,相关文献曾报道过其治疗效果,均由娴熟的术者操作。肿瘤的复杂性常常依据R.E.N.A.L.[7]及P.A.D.U.A.[8]评分系统,评分与其复杂性呈正比。肿瘤的大小及复杂性关乎到术后效果及并发症的发生率,最新的研究显示[10]肿瘤的复杂性是影响手术结果的独立危险因素。外国学者Buffi[11]曾报道了对255例P.A.D.U.A.评分10分以上肾癌的统计分析。文献中指出,158例的WIT大致控制在18.6分钟(min)左右。同样地,另一位学者Beksac[12]在收集144例R.E.N.A.L.评分10分以上肾癌的资料中发现,其中89例在WIT、术中术后并发症及肾功能恢复方面皆能达到理想手术效果。其他的学者研究表示,RAPN能完成T1b肾癌手术,且WIT大致控制在22~24 min上下。
随着RAPN研究的深入,也发现术者的熟练操作掌握在手术中存在优势。治疗孤立肾肾癌时,学者Hillyer[13]统计的26例后分析得出,WIT可控制在17min左右,其中2例出现术中并发症,但并发症发生率处于可接受范围内。多发肾肿瘤大多考虑开放性根治性肾切除术(open radical nephrectomy,ORN)或者开放性肾部分切除术(open partial nephrectomy,OPN),若采取RAPN术前应着重交代中转开放的可能[14]。若RAPN同时处理双肾肿瘤可能由于术中体位的改变难以实施。曾经也有过相应报道,但具体术中是否根据肿瘤大小、复杂性来判断双侧处理顺序的问题上仍未达成共识。学者Abreu[15]曾分别选取了33例多发肾肿瘤与单发肾肿瘤在RAPN的对比,EBL、WIT、肾小球滤过率(estimated glomerular filtration rate,eGFR)改变等问题上不存在统计学差异,研究也表示多发肾肿瘤组的OT及LOS更长一些。RAPN在治疗原位或异位肿瘤复发的相关文献很少。Autorino[16]曾统计过9例患者,其中包括既往曾接受过开放、腹腔镜、机器人手术的PN因复发行RAPN手术治疗,其中3例未阻断肾动脉。而另6例,术中WIT仅限于17.5 min,EBL也仅为150 ml,均未见术中并发症,仅2例出现术后并发症。相比之下,Turna[17]报道过25例曾行OPN后再次选择LPN,其WIT长达35.8 min,EBL处于215 ml左右。由此可见,RAPN在肾癌的治疗中较LPN具有一定优势。即使尚处于学习曲线中,RAPN的手术效果与由经验丰富的术者进行LPN相当[18]。RAPN是否能纳入肾癌的标准手术治疗方式,尚缺少多中心、大数量的统计学研究。
4 手术入径
RAPN的手术路径[19]分为前腹腔入径和腹膜后入径两种。前者最为常见,后者在我国开展更为广泛[20]。二者各有特点,就最佳入径的问题上国内外尚未达成共识。
前腹腔入径的特点主要在于操作空间大、解剖明晰、操作范围广,易处理肾门及靠腹侧肿瘤,但对消化系统器官损伤机率大且易受既往腹腔手术史的影响。操作空间狭小与解剖层面模糊[21]作为腹膜后入径的主要弊端,但对肠道几乎不存在任何影响。械器臂能直达肾门完成血管阻断及肾表面完成切除肿瘤的操作。相比之下,腹膜后入径在节省OT和缩短LOS方面更有优势[21]。学者Arora[22]就这一问题进行了相关对比研究发现,腹膜后入径在住院日与控制EBL方面优于前腹腔入径,腹膜后组中因肿瘤位置差异在OT、WIT以及并发症发生率上,无统计学差异。
Mittakanti[23]得出的结论就LOS及EBL上与Arora结果相同,而国内学者Leilei Xia[24]荟萃分析后得出的结论与上述二者完全不同,入径的选择并不会影响WIT、EBL、并发症及中转开放率等问题。值得一提的是,机器人在分离、切除和缝合等方面的灵活操作较传统腔镜优势是肯定的。入径的选择主要根据患者的身体情况,肿瘤的解剖位置、大小和既往手术史以及术者的手术习惯来决定。
5 手术步骤
5.1 阻断肾动脉
考虑到手术安全性及效果,肾动脉阻断可以减少肿瘤切除时的EBL,可维持术野清晰,是作为RAPN的关键步骤。热缺血时间往往会导致肾功能损伤,在PN手术中是最值得关心的问题[25-26]。研究表明[27]WIT是RAPN术中影响肾脏及术后肾功能损伤的主要因素。热缺血时间的延长会导致肾功能的下降[28],即便在20 min以内的WIT,仍会对肾功能造成短期影响。若WIT超过25 min之后,每增加1 min都可能增加术后尿毒症的风险[29]。
在此基础上,“零阻断”的理念也已被运用到临床实际应用中。RANP“零阻断”适应于较大的外生型肿瘤或和复杂性肿瘤(低R.E.N.A.L.或P.A.D.U.A.评分)。国外学者研究发现零阻断会导致OT延长、EBL增加,伴随着术后较高的潜在出血风险。零阻断同时也依赖于术者的经验及操作[30]。不可否认的是,EBL增加导致术野不清晰可使得OT延长和中转开放率高,这些问题导致零阻断在临床应用中难以普及。Antonelli[31]报道了术中零阻断中转为完全阻断的案例,肿瘤的大小及肾肿瘤评分被认为是中转的独立危险因素。另文献指出,减少短暂性缺血并没有任何临床益处[32]。“零阻断”的效果尚不能肯定,开展少,安全性及有效性等仍需大量多中心研究证实。
肾癌类型繁多针对肿瘤,具体采用哪种阻断方式,还应结合肿瘤大小、部位等实际情况综合考虑。
5.2 肿瘤切除
RAPN在肿瘤切除时的优势是值得肯定的,因其更多地减少正常肾组织损失而完整切除肾肿瘤。与OPN和LPN术式不同的是,术者可利用机器人超声探头[33]确定内生型肿瘤和靠近肾门处肿瘤的位置,也可以利用更先进的红外荧光技术加强对肿瘤的识别。在切除肿瘤和评估切缘的过程中提供实时指导。部分肾肿瘤往往位置较深或毗邻血管,机器人操作系统能给予术者一个高清的操作空间环境,有利于术者更佳地区分肿瘤与正常组织。在肿瘤切除边缘的问题上,国内外学者普遍认为在辨别假包膜后不破坏的情况下,将肿瘤完整切除或切除的肿瘤表面覆盖正常组织即可达到了手术目的。电剪切除时也能帮助更好地区分肿瘤与正常组织,降低手术切缘阳性率。此外,RAPN也有应用激光切除的报道,因其切除时具有连续性、同步凝固功能等优点[34],铥激光、绿激光、二氧化碳、二极管激光等激光[35-37]应用于肿瘤切除中效果良好,但缺乏理想的激光且其应用尚存在争议,仍未被作为常规选择。
5.3 创面缝合
创面重建是确保手术成功的另一重要步骤,良好的缝合技术既能缩短WIT而降低肾缺血损伤,又可避免术后出血及尿漏等并发症的形成。如何快速而紧密的缝合,在这一问题上,提倡利用Hem-o-lok夹代替外科打结,3-0可吸收线连续缝合后用Hem-o-lok夹间断固定并保持一定张力,加快手术进程。同样地,倒刺线的使用比可吸收线在WIT、术后并发症等问题上表现出良好的优势。值得注意的是,某些术者采用不进行肾皮质缝合以期降低肾功能损伤的风险,然而,目前尚缺少关于此技术的分析报道。
6 手术并发症
并发症是术后观察的对象,也可作为判断手术成功的标志。并发症主要包括出血、尿漏、假性动脉瘤、肾功能减退、肾萎缩、动静脉瘘、血管瘤、肾周脓肿等。往往术者的手术经验以及患者个体性差异等因素决定并发症的发生率及程度高低,早期发现与及时干预能有效地降低并发症,避免造成不良后果。
6.1 出血
出血可分为术中及术后出血,术中出血常发生于肾动静脉的处理过程。如若出现,果断中转开放是必要的选择。RAPN因为设备复杂繁琐则需要更多的时间,这一点不利于手术方式的转换。另外,术中还应注意潜在分支血管的存在,必须妥善处理以避免严重的并发症发生。术前常规进行非创伤性血管成像技术(computer tomography angiography,CTA)用以判断肾相关血管走形分支情况。而术后出血则多是由于术中创面重建不佳,缝合不紧密或者是血管夹脱落等原因。术后血性引流量较少时可采取平卧制动等措施,必要时输入去白细胞红细胞悬液。若出血量大,可行超选择性动脉栓塞术,如若仍不能有效控制应尽快行RN避免不良后果发生。
6.2 其他并发症
尿漏表现为体温升高,行CT或MRI检查可发现肾周积液,发生率为10%左右[38],紧密缝合可降低发生率。引流液呈淡黄色,化验后尿素及肌酐明显升高则可以确诊,腹腔充分引流可自行愈合。假性动脉瘤也与创面缝合时的肾血管损伤有关,其发生率小于5%[39]。肾大血管的处理增加可作为假性动脉瘤的独立危险因素。术中过多分离肾蒂血管可增加发生率,“超选择性动脉阻断”必须考虑并发症的发生。肾动脉瘘发生率不高[40],腔镜操作明显高于开发手术。
术中精准操作可避免并发症的发生,术后持续动态观察引流性质及监测血常规及肾功能等指标能早期发现并采取干预措施。由此可见,并发症的发生主要涉及术中血管阻断和创面重建过程,缝合技术精湛及紧密缝合是杜绝并发症发生的办法。
7 Da Vinci机器人手术系统缺陷
Da Vinci手术系统在泌尿系统领域发挥着显著的优势,在保留肾单位手术中应用广泛,尤其是治疗各种类型的肾癌。不过,它的缺陷必须重视并予以完善,例如手术系统发生故障、中转开放时耗费时间长等问题。由此引发组织器官不可逆性损伤,甚至危及生命。其主要的劣势在于手术费用高[41],是否采用机器人系统手术治疗需考虑患者的经济承受能力。
8 结论
Da Vinci手术系统临床开展多年,结合国内外众多研究成果,展现了它在手术中具有精准性高、创伤小、恢复快、预后好等优势。随着该手术系统用于泌尿系统微创治疗,独特的操作、学习曲线短等优点适用于各种类型肾癌的治疗。机器人辅助腹腔镜手术弥补了传统腔镜的弊端,并实现了跨区域远程手术的理念。此外,由机器人自主化进行手术的手术系统已在动物模型上开展,动物实验逐步向临床转型成为可能。Da Vinci机器人手术系统发挥的良好优势,在泌尿系统领域可以得到更好地发展,成为未来泌尿系统微创手术的主流趋势。
猜你喜欢
介入放射学杂志(2021年5期)2021-05-20 09:49:04
心电与循环(2021年1期)2021-02-05 02:19:58
海南医学(2016年8期)2016-06-08 05:43:00
少儿科学周刊·少年版(2015年4期)2015-07-07 21:13:44
少儿科学周刊·少年版(2015年4期)2015-07-07 21:09:31
少儿科学周刊·少年版(2015年4期)2015-07-07 21:08:08
医学研究杂志(2015年7期)2015-06-22 11:00:39
少儿科学周刊·儿童版(2015年4期)2015-06-17 03:37:19
山东第一医科大学(山东省医学科学院)学报(2015年3期)2015-06-07 10:06:37
天津医科大学学报(2015年3期)2015-06-05 12:21:49
