
大型飞机最小道面宽度试飞技术研究
2022-01-20 01:39张妙婵
工程与试验 2021年4期
张妙婵
(中国民用航空适航审定中心西安航空器审定中心,陕西 西安 710065)
1 引 言
飞机转弯所需最小道面宽度的定义为:飞机在跑道上进行180°的机动转弯时所需的最小跑道宽度。飞机地面转弯半径越小,所需的道面宽度越小。因此,飞机最小道面宽度的试飞也可称为地面最小转弯半径试飞。
对于中小型飞机而言,进行最小道面宽度试飞时,要求飞机单纯依靠前轮转弯机构来完成,试飞时保持最大转弯角度稳定转弯超过180°,通过获取飞机主起和前起轮胎的转弯半径来得到最小道面宽度的结果。
对于大型飞机而言,转弯时所需要的转弯力矩较大,且受侧滑的影响,单纯依靠前轮转向机构保持大角度转弯很困难,或者根本无法实现。即使可以实现大角度转弯,进行稳定转弯超过180°所需的试验场地也会很大,试验条件要求很高。由于飞机所需的最小道面宽度直接影响着飞机的使用,因此,开展该方面的试验验证必不可少。那么,寻找一种适合大型飞机进行最小道面宽度试飞的方法尤为重要。
本文分析了国外大型飞机如A380、B777以及国内某支线飞机进行机动转弯方面的试飞情况,给出了某大型飞机最小道面宽度试飞方法,包括试飞时的操作方法以及试飞的数据处理方法,并将该方法应用于某大型飞机的实际试飞,取得了良好的效果,为其它大型飞机在该方面的试飞提供了参考。
2 国内外其它飞机的相关情况
通常,飞机在起飞或着陆地面滑行的过程中需进行转弯操纵。对于前三点式起落架布局的飞机,主要有3种操纵转弯方式,即操纵前轮转弯、差动刹车转弯和非对称推力转弯[1-4]。
操纵前轮转弯可使飞机转弯灵活,飞行员操作简便,甚至在主起落架轮胎漏气时仍能操纵飞机[5-8]。我国某支线飞机进行最小道面宽度试飞时即采用该方法转弯一周,获取了实现180°转弯所需的道面最小宽度。目前,国内外大多数的中小型飞机也都采用这种方式。但对于大型飞机而言,采用该方法实现180°转弯时所需道面宽度大,试验所需的试验场地大,无法满足飞机在某些机场条件的180°转弯需求。
对于大型飞机而言,单纯依靠操纵前轮转弯、差动刹车转弯和非对称推力转弯的方式很难实现飞机低速大角度转弯。因此,一般采用差动刹车辅助前轮转弯的方式或者非对称推力辅助前轮转弯的方式。
采用差动刹车辅助前轮转弯会减小飞机所需的道面宽度,但对于大型飞机而言,会导致轮胎磨损和局部高温,可能引起轮胎爆裂。为了降低试验时大角度转弯的风险并能使飞机在尽可能窄的跑道上完成试验,A380-800飞机在前轮最大角度转弯时,采用不对称推力(转弯一侧两台发动机停车)+差动刹车(使用转弯一侧的刹车),来辅助前轮转弯完成180°转弯试验。A400M飞机通过发动机差动反桨和主起落架的差动刹车辅助前轮转弯,实现在最小30m宽的跑道上掉头。但是,这样的操作程序过于复杂,对飞行员的驾驶技术提出了考验,不利于飞机的航线运行。
采用非对称推力辅助前轮转弯进行180°转弯的方式,既可以实现飞机大角度转弯,也不会造成轮胎磨损和局部高温,而且操作程序相对简单,容易实现。B-777-300飞机前轮最大角度转弯时,采用不对称推力辅助转弯,未使用差动刹车,获取了实现180°转弯所需的最小道面宽度。
3 试飞方法
3.1 试验操作方法
根据以上分析,考虑到一般情况下大型飞机刹车温度容易过高的特点和操作的难易程度,在开展最小道面宽度试验时,采用非对称推力辅助前轮转弯的方式进行180°转弯更加简便、安全。
假设试验时飞行员座椅已调到最佳视线位置,并假设试验跑道为典型的滑行道宽度。由于存在滑行道宽度、圆角尺寸和滑行道面状况各种不同的组合,所以试验时必需由飞行员判断来决定每次转弯的起始点和前轮转弯手轮的移动量。对于前轮转弯最大角度大于30°的飞机,试验时开始转弯的速度不能超过10kn。
试验时,可采用一些滑行技巧以减小飞机转弯试验所需的试验场地。试验正式开始前,使主轮轮胎尽量接近跑道边缘,这样可以有更大的可用道面来转弯。一般先将飞机完全停住,油门收到慢车,将手轮转到所需的转弯角度,松刹车并增加外侧发动机的推力[9],在转弯中只用一侧发动机并保持5kn到10kn的速度以尽量减小转弯半径,使用正常刹车来控制飞机速度。当飞机转过90°后,使主轮大约处于跑道中心线上,然后继续转弯,直到飞机转弯角度大于180°。
某些飞机在完全停住时,手轮打到最大转弯角度,加推力后会产生前轮打滑现象。针对这种情况,可以在飞机进入跑道前低速运动的过程中将手轮转到最大转弯角度,进入跑道后利用不对称推力辅助进行转弯。采用这种技术能使飞机实现低速转弯且不会对起落架和轮胎造成过大的压力,但这种方法对飞机进入跑道的切入点有严格的要求,以保证飞机在进行180°转弯时机轮不会偏出跑道。图1给出了这种转弯操作方法的示意图。

图1 转弯操作方案示意图
3.2 数据处理方法
传统的试验结果的获取方式为:根据轮胎在跑道上留下的运动痕迹进行现场测量,得到飞机地面转弯所需最小道面宽度。其优点是:简便快速,对于不同类型的最小道面宽度试飞方法均适用。缺点是:由于飞机转弯超过180°后轮胎运动轨迹较为复杂,很难寻找各起落架轮胎对应的轨迹;在开展多次试验时,每次试验均需寻找不同的试验场地;该方法不能获取飞机各起落架轮胎对应的运动轨迹。
目前,比较成熟的另一种计算方法为:利用飞机上安装的GPS天线的运动轨迹,得到飞机上GPS天线所在位置的转弯半径,根据GPS天线相对飞机前轮和主轮的位置,进而解算出飞机的前轮转弯半径和主轮转弯半径。飞机所需的最小道面宽度=前轮最小转弯半径+外侧主轮最小转弯半径+1.5m(1.5m为安全余量经验值)。其优点是:计算方法简单,且能获取各起落架轮胎的运动轨迹,国内某支线飞机采用的就是该方法。但是,这种方法需要飞机进行稳定转弯一周来获取平滑的转弯轨迹,即转弯时各起落架的轮胎轨迹要近似为圆,适用于仅采用操纵前轮转弯进行最小道面宽度测试的试飞方法。由于大型飞机是采用不对称推力辅助前轮转弯的方式进行试飞,试飞时的轨迹很难为圆或半圆,因此该方法不适用。
针对不对称推力辅助前轮转弯的试飞方法,需寻找一种可行并可靠的数据处理方法。大型飞机在采用该试飞方法时,各起落架轮胎的运动轨迹不同,必须通过试飞数据计算获取各起落架轮胎的运动轨迹,得到准确的道面宽度结果。由于试验时可以直接获取的数据为飞机上安装的GPS天线的运动坐标,那么如何根据飞机上GPS天线的运动轨迹计算出飞机上各起落架轮胎对应的运动轨迹是数据处理的关键。
以某型飞机为例,图2给出了该飞机上各轮的相对位置示意图。
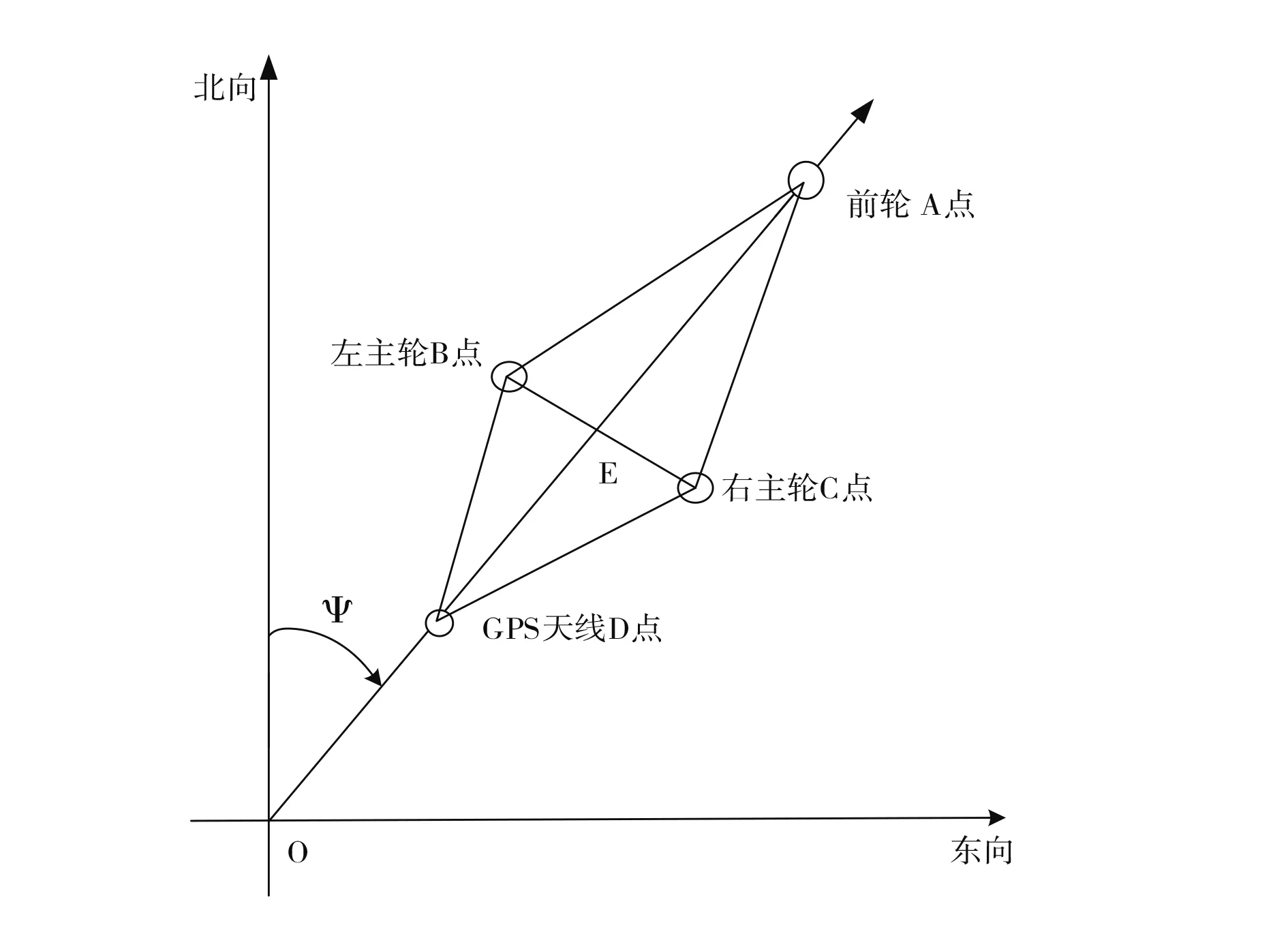
图2 飞机上各轮的相对位置示意图
定义飞机体轴为OA方向,A点为前起机轮中轴线中间点的位置,B点和C点分别为左主起和右主起中轴线中间点的位置,D点为GPS天线位置,E为左右主起连线中点。根据飞机的设计参数可以获取飞机的前主轮距|AE|、主轮距|BC|,根据飞机上GPS天线安装位置相对于前起的垂向距离可获取|DA|。设|AE|=a、|BC|=b,|DA|=c,主起中轴线到主起轮胎边缘的距离为d、主起轮胎直径为e、前起中轴线到前起轮胎边缘的距离为f。如果主起落架为多排轮胎,设相邻前后排轮胎的距离为g。ψ为航向角,即飞机机体轴与磁北(北向)的夹角。可以得出:
(1)
(2)
式(1)中各长度的单位均为m,式(2)中角度的单位为(°)。


AE=c×cos(90°-ψ)
(3)
AN=c×sin(90°-ψ)
(4)
BE=|DB|×cos(90°-ψ+∠BDA)
(5)
BN=|DB|×sin(90°-ψ+∠BDA)
(6)
CE=|DB|×cos(90°-ψ-∠CDA)
(7)
CN=|DB|×sin(90°-ψ-∠CDA)
(8)
由图2可知:
A点的东向坐标=D点的东向坐标+AE
(9)
A点的北向坐标=D点的北向坐标+AN
(10)
B点的东向坐标=D点的东向坐标+BE
(11)
B点的北向坐标=D点的北向坐标+BN
(12)
C点的东向坐标=D点的东向坐标+CE
(13)
C点的北向坐标=D点的北向坐标+CN
(14)
由试验测试数据可直接获取飞机的航向角ψ。由于式(1)~式(8)中等式右侧的参数均已知,可解算出式(3)~式(8)的结果。根据机上测试数据,很容易获取D点的东向和北向坐标。将式(3)~式(8)的结果和D点的坐标代入式(9)~式(14)中,即可求出A、B、C点的坐标。根据A、B、C点的坐标,可得出前起和左右主起的轮胎运动轨迹。在轨迹图上画出跑道方向以及垂直于跑道的方向,即可得出飞机前起、主起机轮的运动所占的跑道宽度LR1。
由于前起和主起的位置是中轴线中间点的位置,要考虑中间点与前后、左右相对位置的影响,需在得到的跑道宽度上加上这个影响量。设影响量为n,则:
(15)
最终飞机所需要的跑道宽度LR为:
LR=LR1+n+1.5
(16)
式(15)和式(16)中,各参数的单位均为m,式(16)中的1.5为安全余量。
将多次180°转弯试验所得到的道面宽度进行统计,最终给出合适的最小道面宽度。
4 试飞结果与分析
以某大型飞机为例,根据上文中给出的试验方法,最终得出飞机180°转弯所需的最小道面宽度,表1给出了计算得到的道面宽度与实际测量的道面宽度。为了保证实际测量的准确性,每进行完一次转弯试验后更换试验场地,确保道面轮胎轨迹的清晰度。从表1可以看出,计算得到的结果和现场测量的结果基本一致,证明所采用的计算方法是正确的。
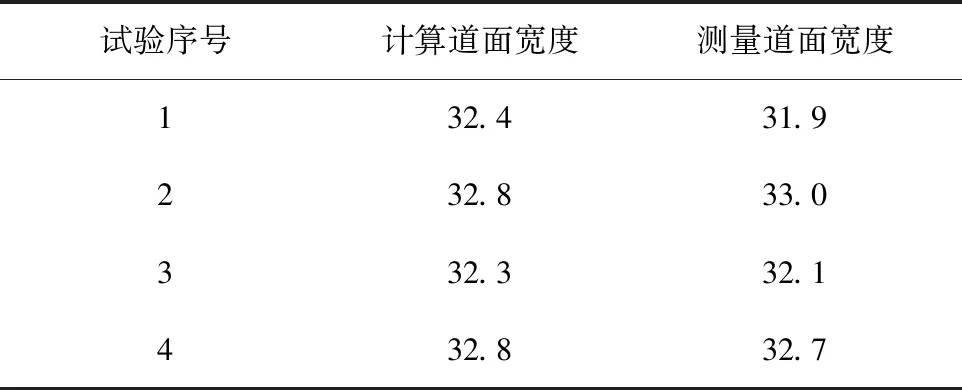
表1 计算结果与测量结果的比较
5 结束语
最小道面宽度试飞已经成为目前大型飞机必须要验证的试验,大型飞机最小道面宽度试飞方法与普通的中小型飞机不同。本文以此为主旨,介绍了国外大型飞机在该方面的试飞情况,进而研究得出了更加便捷有效的大型飞机最小道面宽度试飞方法,包括试飞时的操作程序和数据处理方法。将研究得出的试飞方法应用于某大型飞机的最小道面宽度试飞验证,计算得到的结果和现场测量的结果基本一致,证明计算方法是正确的。该技术对其他类型的飞机也具有通用性,可为其他飞机在该方面的试飞提供很好的技术支持。
猜你喜欢
交通科技与管理(2022年16期)2022-08-27
科技创新与应用(2022年14期)2022-06-02
中原商报·科教研究(2021年6期)2021-05-13
百科探秘·航空航天(2020年8期)2020-07-29
军民两用技术与产品(2019年12期)2020-01-19
小学生学习指导·爆笑校园(2019年6期)2019-09-10
北京航空航天大学学报(2017年12期)2017-04-23
红蜻蜓·低年级(2015年11期)2016-02-02
中国自行车·骑行风尚(2014年4期)2014-10-10
城市道桥与防洪(2014年8期)2014-02-27
