磁张量测量系统非对准误差标定与校正*
2022-01-18 02:58张晓明马喜宏杨晓蕾
传感器与微系统 2021年12期
张 仑, 张晓明,2, 马喜宏,2, 陶 威, 杨晓蕾
(1.中北大学 电子测试技术国家重点实验室,山西 太原 030051;2.中北大学 仪器科学与动态测试教育部重点实验室,山西 太原 030051)
0 引 言
磁性目标产生的磁场叠加在地球磁场之上,会引起周围局部区域地磁场畸变即磁异常。相比于其他物理勘探法,磁异常探测法成本低速度快等优点,目前成为国内外磁目标探测的首选方法[1]。磁场张量测量相对于总磁场强度、磁场矢量测量,可以提供更多的信息,不易受到区间环境的磁干扰影响。因此成为了目前研究的热点问题[2,3]。
磁场梯度张量目前多采用多个矢量传感器组成测量阵列,得到空间范围内磁场的张量信息[4]。由于制造工艺,矢量磁传感器通常会存在零偏、灵敏度和轴间不正交等系统制造误差。各个传感器在组成磁张量测量系统的安装过程中也会出现偏移、旋转等安装误差,偏移误差可以通过工艺消除,但是由旋转引起的非对准误差通常难以消除,会导致张量分量几百到几千纳特(nT)的误差,严重影响张量测量系统的精度,所以,有必要对磁张量测量系统的非对准误差进行标定及校正[5,6]。
传统针对矢量传感器的校准方法往往需要磁屏蔽筒、三轴非磁标定平台、亥姆霍兹线圈等设备,但存在设备体积大,无法携带且成本较高等问题[7]。于振涛等人[8]利用差分测量法融合了磁力仪的制造误差及安装误差,但其并未进行实际应用。张光等人[9]基于标量校正提出了磁张量测量系统的线性模型,但忽视了误差模型中转换过程的高阶小量,一定程度上影响到最终校正的效果。杜昱辰等人[10]提出了基于线性模型的校正方法,但未考虑到线性模型中系数矩阵的误差。
考虑到上述问题,本文针对阵列中多个传感器的非对准误差,尝试构建线性方程组并采用整体最小二乘法求解,计算各传感器相对于阵列系统正交系的非对准误差进行校正,为张量测量系统非对准误差的快速标定提供新思路。
1 磁场张量测量理论与阵列建立
磁场全张量就是磁矢量三分量在三个相互正交的方向上的分量组成的,若某点磁感应强度为
B=[BxByBz]T
(1)
其磁场梯度张量可表示为
(2)
磁场张量测量系统通常工作在无源场环境下,由麦克斯韦方程可知,在无源空间中磁场旋度和散度为0,由式(2)可得Byx=Bxy,Bzx=Bxz,Byz=Bzy,Bxx+Byy+Bzz=0,则磁梯度张量矩阵可表示为
(3)
利用测量系统测量Bxx,Bxy,Bxz,Byy,Byz五个分量就可求出磁梯度张量矩阵G[11]。
2 非对准误差参数建模及校正
在实际中,磁通门传感器安装在阵列结构上时各个传感器正交坐标系间会存在非对准误差,如图1所示,传感器1坐标系O1-X1Y1Z1与传感器2坐标系O2-X2Y2Z2之间存在旋转误差,即非对准误差,经过非对准误差校正后的系统中各传感器输出均为理想正交。

图1 传感器间非对准误差示意
在XYZ三轴上旋转传感器可将坐标系Oi-XiYiZi(i=2,3,4)转换到O1-X1Y1Z1上,定义绕X轴旋转为横倾角α,绕Y轴旋转为俯仰角β,绕Z轴旋转为方位角γ,单个传感器三轴正交输出为Bi=[Bix,Biy,Biz]T,传感器1为参考标准坐标系,输出为B1=[B1x,B1y,B1z]T,以传感器2为例,与传感器1坐标系关系如图2。

图2 传感器坐标系转换关系
定义Kα,Kβ,Kγ分别为横倾、俯仰和方位旋转矩阵。两坐标系任意姿态均能通过绕三轴依次旋转进行转换[12]。旋转矩阵相乘顺序与旋转顺序相对应,这里选择绕X,Y,Z轴旋转的顺序,则传感器2空间任意姿态正交系O2-X2Y2Z2与参考正交系O1-X1Y1Z1间输出磁场三分量转换可以表示为
(4)
式中Kα,Kβ,Kγ分别横倾、俯仰和方位旋转矩阵。X,Y,Z轴改写为向量乘积形式

(5)
定义R为各传感器测量值,Vx,Vy,Vz为旋转向量。假设实验中使测量系统绕三轴旋转,共采集到N组空间姿态数据,则式(5)可增广为线性方程组
(6)
对于线性方程组RV=B,普通的最小二乘思想是在残差平方和极小的约束下求解最佳参数,是建立在R没有误差的前提下,可表示为
RV=B+EB
(7)
式中EB为标准传感器输出B的噪声,但是绝大多数情况下系数矩阵R和观测矩阵B同时存在误差[13],同时考虑二者误差时,线性方程组可表示为
(R+ER)V=B+EB
(8)
式中ER为各传感器测量噪声,与EB为相互独立的白噪声误差,解决这类问题采用整体最小二乘法,对于线性方程组RV=B在以下准则约束下
(9)
式中 ‖M‖F为Frobenius范数,简称F范数,将线性方程组RV=B改写为
[RB][VT-1]T=0
(10)
记增广矩阵C=[RB],对其进行奇异值分解
C=UΣVT
(11)
其中
Σ=diag[σ1,σ2,…,σn,σn+1]
(12)
根据矩阵奇异值(SVD)分解定义,对于增广矩阵CN×4,当N≥4时可进行奇异值分解,即姿态数据应至少满足4组。此时有整体最小二乘解[13]Vx,Vy,Vz
(13)
式中In为n维单位向量。联立式(5)、式(13)可解出α,β,γ角为
(14)
正交系校正顺序与旋转顺序相对应,由式(4)可得校正顺序依次为γ,β,α,即可实现非对准误差的校正。校正后各只传感器将沿着参考传感器1正交系O1-X1Y1Z1输出。
3 仿真分析
通过MATLAB仿真验证提出的线性对准方法。设地磁总场强为54 000 nT,测量系统基线距离为0.45 m。依次绕传感器三轴旋转,绕Z轴开始旋转,间隔为30°,Z轴每转满一周绕Y轴转动一次,Y轴每转满一周绕X轴转动一次,得到1 782组姿态传感器的理想输出B1~4。加入均值为0 nT,方差为1 nT的高斯随机噪声模拟真实磁场环境。在理想均匀磁场中,若传感器之间完全对准则任意姿态下张量分量恒为0,使用RMSE来量化校正效果,以张量分量Bxx为例,如式(15)
(15)
式中N为姿态数,Bxxi为第i个姿态下的张量分量输出,Bxx为参考输出,理想磁场下为0。ERMS理论值为0,ERMS越小,校准效果越好。
将4只矢量磁传感器视为已完成理想正交化即系统误差标定,取X,Y,Z轴旋转角度分别为[0,30°,60°],[30°,90°,120°],[60°,120°,150°],[90°,150°,180°]的4组姿态数据,用于张量测量系统非对准误差的标定。9个参数的预设值与估计值如表1,对应RMSE列于表2。

表1 非对准误差角预设值与估计值

表2 校正前后张量分量RMSE值 nT/m
仿真结果表明,仅使用4组测量数据估计的非对准误差预测精度均高于99.7 %,经对准后系统张量分量输出RMSE值均小于2 nT/m,根据式(3)可知在预设测量噪声范围内。故提出的非对准误差校正方法对准性能良好,可用于张量测量系统补偿校准。
4 实验验证
目前,常用的磁场张量测量阵列有平面十字形、正方形、三角形、空间直角四面体等结构,其中平面十字形阵列结构安装方便,带来的结构误差较小[14],故采用平面十字形阵列结构。用4只三轴磁通门传感器搭建如图3所示的平面十字磁张量测量系统,十字架结构选用无磁结构,基线距离为0.45 m。选取平坦空旷、磁干扰小的环境进行实验。
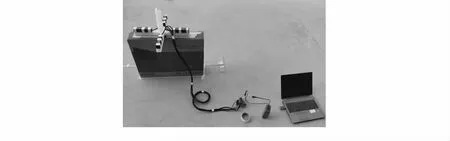
图3 平面十字磁张量测量系统校正实验
测量系统共采集76组姿态信息,分成两部分:单轴组与随机组。单轴组绕系统Z轴旋转一周,采集4组姿态数据(间隔90°),用于估计非对准误差参数;随机组绕任意轴旋转,采集72组姿态数据,用于增加姿态数据量以验证标定效果。以标量磁强计测得系统空间范围内总场强均值Bc作为标准,将4组传感器进行系统误差校正得到理想正交系,以传感器1为参考进行非对准误差角度解算出非对准误差。对比最小二乘法,计算所有姿态数据对准后的测量系统各张量分量Bxx,Bxy,Bxz,Byy,Byz,如图4所示。以0 nT/m为标准的RMSE结果列于表3。

图4 实验对准前后各空间姿态张量分量对比

表3 校正前后张量分量RMSE值 nT/m
结果可以看出:绕单轴旋转1周采集4组姿态数据即可得到较精确估计。基于整体最小二乘法对比最小二乘法估计,考虑到各传感器存在测量噪声误差的问题,对准校正后张量测量系统输出更加稳定、精确,校正后张量分量RMSE值由上千nT/m降低到65 nT/m以下,考虑到实际测量环境中并非均匀磁场,会受到多磁源、局部磁异常、传感器自身磁滞等因素综合影响,可认为非对准误差得到了有效校正。
5 结 论
本文提出磁场张量测量系统的非对准误差校正法,对非对准误差产生机理分析并进行数学建模。基于平面十字张量测量系统,只需测量系统采集4组姿态数据,即可得到较精确的系统非对准误差参数。仿真校准后的非对准误差角预测精度高于99.7 %,实际系统测量环境中并非理想均匀磁场,会受到多磁源、局部磁异常、传感器自身磁滞等因素影响,实测校正后张量分量RMSE由校正前上千nT/m降至65 nT/m以内,相对于最小二乘法降低了一个数量级,对准后张量系统输出均方根小而稳定,且无结构要求,故还可以应用于任意三轴磁传感器及与加速度计组合的测量系统内。具有一定的科研、工程应用价值。
猜你喜欢
数学物理学报(2021年1期)2021-03-29
五邑大学学报(自然科学版)(2020年4期)2020-12-09
学生天地(2020年3期)2020-08-25
汽车观察(2018年9期)2018-10-23
中国自行车(2018年8期)2018-09-26
当代陕西(2018年12期)2018-08-04
中国惯性技术学报(2017年1期)2017-06-09
山西大同大学学报(自然科学版)(2016年2期)2016-12-12
探测与控制学报(2015年4期)2015-12-15
郑州大学学报(理学版)(2014年4期)2014-03-01