
机床机械桁架机械手的设计与结构分析
2022-01-18 09:58吴铠瑞
大科技 2022年4期
吴铠瑞
(安徽理工大学机械工程学院,安徽 淮南 232001)
近年来,在中国基础劳动力市场价格持续上涨的同时,自动化生产技术取得了稳定发展。一些中小型机械制造加工企业和数控机床的市场销售环境,不断增加对自动化加工制造技术和设备的需求。有的是简单的批量加工制造,有的产品是单机加工制造的,增加了对自动化加工制造技术和设备的依赖。随着现代科学技术的发展和进步,机械手的应用范围不断扩大。机械手可以处理和抓取材料和商品,是高度自动化的生产设备,机械手与数控机床相结合的自动化生产线,可以提高生产效率,独立完成上料、生产、组装、回收等所有生产过程,减少人力资源投入。在上述机械加工制造产品的制造加工中,引进和应用自动化技术和设备形式,可以提高制造加工技术的效率,有效降低经济成本投入。在这个阶段,为了提高机器手的应用水平,将分析机械手在自动数控机床上的应用,明确设计要求、开发选择、开发平台、相关结构等设计方案。最后,结合以上因素设计机械手的数据结构,展开相关讨论,为后续相关工作提供参考。
1 数控机床设备机械桁架结构分析
1.1 立柱技术组件
立柱技术部件的主要作用是在数控机床设备中支撑机械桁架部件的整体结构,使机械桁架部件在任何工况下都能保持稳定良好的运行状态。双立柱结构通常在大多数单机自动化设备采用,作为支撑结构。对于一些小工件,或者安装和使用环节的空间比较有限,可以采用单立柱结构支撑结构。
1.2 横梁技术组件
横梁技术部件通常由钢和铝合金材料制成,是加工工件在传输环节需要依赖的技术通道,在制造过程中一些小型机械零部件需要大量的铝合金柱结构。但是,在制造过程中,一些具有大中型结构特征的机械零件主要以钢材作为主要生产资料。从比较的角度解释和分析,在应用过程中钢结构技术材料,主要优势是制造过程中相对较低的经济成本和较好性能的刚性。铝合金横梁主要技术优点是质地轻、造型可塑性强、便于安装和运输,其范围不断扩大。铝合金材料技术性能优良,适合配套大量机械设备技术零部件的加工生产,具有更美观的外观特点。
1.3 驱动技术组件
由带有传动结构的驱动技术、齿轮减速箱部件和电气设备组成,数控机床的内部机械桁架部件。现阶段,大多数数控机床中,60.00~170.00m/min 为机械桁架的运行速度,在运行引入一般的丝杠传动装置,难以满足桁架结构时的速度要求。在生产设计过程中,数控机床的内部机械桁架部件大多倾向于使用小齿轮部件和带齿条的电机设备,在特定的实现过程中这种设计思想能达到0.06mm 精度。如果在运行中数控机床的传递环节精度比较低,也可以考虑伺服电机装置与同步带总成的传递方式。这种传动方式的主要优点是经济成本较低,使用过程中维护保养比较方便,结构设计比较简单,这种传输方式适用于中小型企业。使用过程中同步带断裂的可能性很大,这类传动的精度一般可以达到0.09mm。
1.4 润滑技术组件
对于数控机床内部的机械桁架部件,机械手在操作过程中必须经历长行程,速度也比较高。用稀油润滑时,润滑效果比较低,对外界环境的污染程度比较高。对于某些润滑过程,应考虑脂润滑或480 高粘度润滑剂,导轨需要在自动润滑泵的帮助下定期润滑。
1.5 控制技术组件
谈到数控机床的内部机械桁架部件,重点是在运行过程中,机械手的技术部件能否顺利发挥其最佳功能。为了减少各种技术故障的可能性,有效提高数控机床内部机械桁架部件的运行可靠性,通常采用航空连接器来处理设备中各种电气部件的连接。因焊接工作不当而导致系统运行不稳定的情况,可以在应用上述技术的过程中避免。同时,采取适当的安全措施,在设备系统运行过程中,安装和配置设备系统的受限设计元件、集成安全元件、零回延时开关元件、零开关元件。
1.6 直线运动技术组件
CNC 机床的内部机械桁架部件通常需要与V 形导轨技术系统或直线导轨技术部件相匹配。在120.00m/min 的运行速度下将直线导轨组件引入高速桁架技术结构中,则存在滑块组件脱落的风险。为有效解决上述问题,将引入V 型导轨系统来代替在高速桁架件制造中使用多年的常规直线导轨。直线导轨与V 型导轨系统从对比分析来看,相比具有多元化的技术优势,主要体现在以下几个方面:①具有很强的防尘能力。V 形轮中心的轴承在某些传动过程中,通常不与导轨的表面位置直接接触。在传动过程中,V 型轮有效去除V 型导轨刮削过程中的灰尘和物质。②在操作和使用过程中可以表现出更高水平的线速度。“V 型琨+V 型导轨”的驱动技术引进在V 型导轨系统中,在V 型导轨上V 型琨可以进行滚动运动,作业过程的速度可达600.00m/min,是一个非常高速的传动目标。③为有效减少装配环节的运作难度,四组V 型轮对应四个滑块通常需要安装在V 型导轨系统。滚珠组件与直线导轨组件的相互接触关系对应于V 型轮与V 型导轨的相互接触关系,关系结构大大降低了对安装数据的基本要求。④技术维护成本低。如果设备运行过程中V 型轮损坏,无须拆卸导轨即可更换V 型轮,在设备系统运行过程中,可显著减少技术人员的操作时间,随时结合实际要求调查预紧系数,以保证数控机床中机床桁架部件在运行过程中的稳定性和有序性。
2 机床机械桁架机械手总体设计
在设计机械机床桁架手时,可分为两部分:机械手和机械抓手。在设计桁架时,可以降低设计复杂性并简化其结构。因为,力学中结构梁的受力结构于桁架的受力结构类似,所以,可以将机械手简化为结构梁。支梁的弯矩图从力学角度看,可以作为桁架与简支梁水平比较的依据,从中可以分析出机械手的力学分析图,机床制造过程中必须注意对机械臂稳定性的高要求。因此,在选择立柱时,应选用高度高、空间小的立柱、重量轻和稳定性为主力。
2.1 机械手臂的总体设计
机械手根据工作原理和具体结构可归类为机器人,是现阶段自动化生产线中广泛使用的一种传送装置。从表面来看,桁架机械手的智能化程度有一定的限制,外观远没有工业机器人那么华丽。但是当智能设备应用于工业时,机械手所体现的价值就会增加。现阶段,在自动化行业中桁架机械手起到一定的辅助作用,主要作用是工件和产品的搬运和运输,也是实现自动化生产线建设的关键组成部分。操作金属加工机床时,是工件与刀具关系的调整,最重要的标志是材料的加工,这种关系在一定程度上影响了机床的整体性能,而桁架机械手只参与工件和成品的加工,在工作时并不直接参与工件的加工。这个过程需要科学计算夹爪抓地力和行走速度,并在设计时进行分析,以防止在运输过程中损坏工件。此外,自动机床桁架机械手需要更大的自由度来满足加工要求,操作空间受多种因素影响,因此,框架分析机械手设计过程应尽可能避免复杂的运动。与传统加工方式的摆杆输送机、步进输送机、板条输送机相比,可以选择可靠、准确的桁架机械手,精度更高、运行速度更快、适合长期工件运输。
自动化机床为了增强可操作性和水平,软件Autodesk Inventor 设计,可以使用三维设计控制程序。在此内容上,可以利用VB.NET 语言扩展和重新开发Visual Studio 工具得控制程序,使桁架操纵器能够实现控制程序,这有两个主要原因。首先,实际二次开发需求可以满足Autodesk Inven-tor 这类系统,也有很好的二次开发接口。其次,Autodesk Inventor 可以完成复杂模型的构建,是一款高价值的3D 建模软件,帮助设计师从整体的角度设计和开发桁架机械手。
2.2 桁架结构
桁架结构的可靠性和运行速度较高、满足加工要求,在运行时机床的桁架机械手,很大程度上依赖于桁架结构为其提供动力。横梁部件、立柱部件、驱动部件、直线运动部件等是现阶段桁架机械手的桁架结构,由于立柱组件主要负责支撑整个结构,因此桁架机械手始终保持稳定的操作环境,并避免操作过程中的噪声和振动。一般工作环境狭窄的地方采用单立柱方式,自动化生产加工线主要采用双立柱支撑形式,柱子的数量通常是多级连接的两倍。铝合金材料作为立柱的原材料,对于一些对立柱承载力要求较高的结构,由于运输通道的承载能力要求较高,钢结构可作为大型生产线的主要材料,钢结构材料的优点是成本低、韧性高。驱动部件通常采用齿轮减速器和伺服电机的组合,60~170r/min 在此阶段是桁架运行速度,无法支持常规工作模式下的丝杠速度。齿轮减速机和伺服电机相结合的驱动系统,具有维护相对容易,兼容性强、精度高的优点,存在同步带断裂等安全问题。但铝合金材料的主要特点是外形美观、便于携带和安装、重量轻、不易生锈,适用于大型生产线。但由于其价格较高,其应用范围相对较窄。齿轮减速机与伺服电机相结合的驱动系统,维护相对容易,具有兼容性强、精度高等优点,但存在同步带损坏等安全问题。
2.3 驱动系统
机床桁架机械手主要有两种驱动方式:移动式和旋转式。以上两种操作方式的区别主要是手指的不同,根据机械手的抓握方式可分为内部和外部。①气动驱动系统,其中电磁阀控制机械手爪,气流调节阀调节机械手爪的移动速度,这种驱动系统是主要原因成本会更低。②电驱动方式,现阶段以电驱动方式最为频繁,因为机床在使用过程中也需要电力支撑,而且这种驱动方式也需要使用电机为驱动系统提供动力,是使用的机械手驱动方式实现对机械手的完全速度控制。③液压驱动方式,该模式主要用于通过液压系统控制机械手,最大的优点是操作位置的连续控制和传动过程中表现出的高刚性。液压驱动系统一般采用液压马达作为输出源,表1 为内部驱动元件的使用位置和特点。
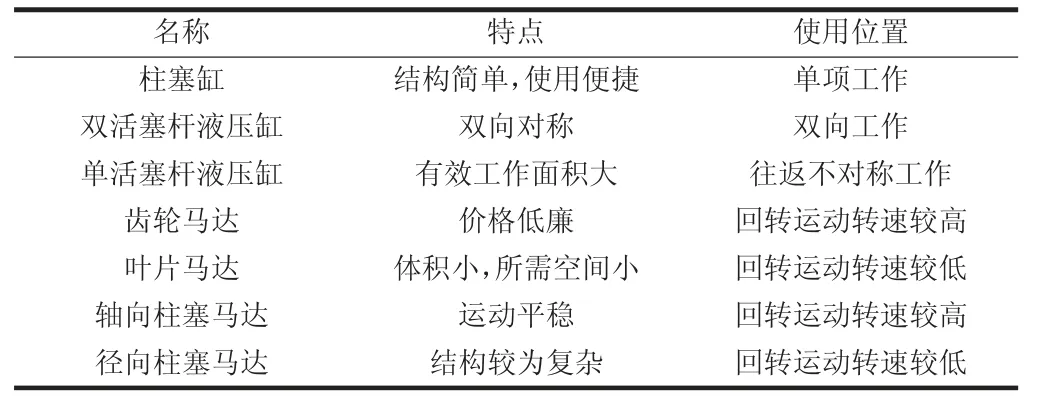
表1 液压驱动系统内部元件特点及使用位置
2.4 机械手抓手设计
物料和成品的输送主要是桁架机械手在自动化生产线中的作用,在生产机床和上下料导轨之间移动生产原材料,将生产出来的零件从生产线上移动。应根据实际生产需要合理选择机械手夹爪的种类,主要包括抓取、提升和平移。不同类型的机械手夹持器适用于不同的生产需求。目前,正在推出一些流行的抓手模型。
①连杆杠杆式抓手。该类抓手通过杠杆和连杆的传动可以抓取和释放抓手,是基于机械连杆结构设计的,但是,这种机械手抓手有一个致命的缺点,抓手容易损坏制造材料和最终产品,这意味着具有相对较高的抓地力,使这种类型的抓手具有相对较高的应用水平。②机械自锁抓手:这种机械抓手非常适合抓取运动,结构比较简单,此类抓手具有自锁式抓手,可防止抓手在夹持零件时脱落。由于其极高的精度和安全性,深受广大用户的青睐,也是设计人员首选的系统设计形式。③齿条齿轮抓手。该抓手通过齿轮之间的传动装置控制,这种结构的机械手的高传输性能和控制命令的高响应速度可以满足高要求,加快生产。此外,在操作和使用数控机床时,需要根据实际的基本工作环境,在设计和成型过程中确认机械手爪的外形小巧轻便,满足数控机床的基本功能要求。同时,具有相对紧凑的结构特点和充足的技术多样性,机械手爪设计工作的具体开展应围绕3 个基本点:①在数控机床的实际操作和使用过程中,支持检查机械手爪部是否出现各类技术故障,相关人员可以更方便地完成维护工作。②必须遵守相关的技术管理和指导流程。③要综合考虑设计工作过程中必须付出的经济成本。在根据以上3 个设计环节的技术控制点推进机械手抓手设计的具体过程中,可以具体考虑杠杆式机械手抓手的设计工作,活塞施加的推力,用于支撑实际涉及的各种技术结构,联动过程完成,最后支撑特定安装的机械手的爪子,保证稳定、放松和夹紧动作。
2.5 机械手臂
在桁架上设计机械手的手臂时,从结构上看,需要考虑在操作过程中机械手的承载能力,必须满足机械臂的容量要求。机械手从运动上看,必须满足快速运动。由于安装在机床桁架上的机械手通常只进行直线运动,通过液压方式直接驱动机械手是现阶段主要的驱动方式,使用直径最大的液压油缸,在选择液压油缸时,需要尽可能提高机械臂的整体强度,液压缸尺寸的选择和验证,活塞杆校验公式可参考式(1)。

式中:{σ}——活塞杆材料的许用应力;F——活塞杆上的力值作用。
液压缸壁厚度确认公式见式(2)。

式中:D——液压缸内径;Py——气缸的试验压力。
桁架机械手的操作主要是水平的,械手上下运动当到达指定位置时,抓手夹住料件,完成反向运动,抬起料件。当零件到达生产线时,抓手移动,零件松动。多个位置的PLC 控制限位器在这个过程中,限制了机械手的操作范围。当机械手拿起一个组件时,另一个组件被添加到保持区域,组件的运输机械手完成。然后返回零件夹持区,机械手下降,夹持零件并放置在生产线上,然后返回零件夹持区。PLC 控制限幅器当机械手返回到工件夹持区时,停止脉冲输出。当机械手完成其运动时,桁架机械手会执行上述操作,实现产线开发自动化。
2.6 机械手的原理以及结构形势分析
由控制系统、主体和驱动系统三部分组成桁架机械手,在平面上的直角坐标系中可以通过将桁架机械臂分布来控制其运动。在这个过程中,设计以龙门结构为主,y 轴梁、z 轴垂直梁、底座、立柱和过渡板为整体结构。在z 轴上桁架机械手的水平运动由伺服电机控制,通常采用铝合金导轨来减少滑道的摩擦,为了减轻自身质量。
3 结语
综上所述,随着劳动力成本不断增加,社会经济的发展和进步。今天,精密车床加工技术和现代机械制造设计正在广泛地实用化,为了确保技术水平,提高工作效率每个项目在产品开发的每一个环节都不是独立的,包括产品销售、加工制造、产品应用,所以任何一个特定环节的技术问题都会影响到整个过程。机床自动化的发展也提出了新的要求,桁架机械手是生产机床配套设施自动化程度的基础,取代了传统生产模式中的手工作业,但是在机床上桁架机械手的应用还存在一定的限制,这主要体现在控制系统和驱动系统的结构还没有形成完整的系统标准。近年来,随着科学技术不断进步和世界经济的快速发展,用户对产品质量的要求越来越高,这可以加速精密数控车床加工技术和最新的机械设计制造技术的快速发展。因此,设计师可以增加PLC 控制方法的适用性。对结合多方力量设计的桁架机械手进行了彻底的测试,设计时要考虑诸多影响因素,从根本上提高了实用性能,避免了主观盲目设计的增加。在经济全球化进程中,我国工业技术的进步,促进了我国工业发展的快速发展和产品的改进。只有这样,才能进一步提高桁架机械手的工作能力和质量,促进自动化生产线的健康稳定发展。
猜你喜欢
设备管理与维修(2022年21期)2022-12-28
制造技术与机床(2019年12期)2020-01-06
制造技术与机床(2019年11期)2019-12-04
建材发展导向(2019年5期)2019-09-09
制造技术与机床(2018年12期)2018-12-23
制造技术与机床(2018年11期)2018-11-23
电子制作(2018年10期)2018-08-04
河北农机(2017年12期)2018-01-20
制造技术与机床(2017年4期)2017-06-22
制造技术与机床(2017年4期)2017-06-22
