
系统参数对三稳态压电俘能器性能影响分析
2022-01-18 08:14满大伟徐德衡张红亚康小方
安徽建筑大学学报 2021年6期
满大伟,徐德衡,张红亚,康小方
(安徽建筑大学 土木工程学院,安徽 合肥 230601)
传统的线性压电俘能器在环境振动频率偏离其固有频率时的俘能效率很低,为了解决这个问题,能产生宽频、大幅阱间运动的多稳态压电俘能系统受到了广泛关注。Mcinnes等建立了双稳态压电俘能器的理论分析模型,利用随机共振机理提高了系统的俘能表现。Stanton等建立了悬臂梁式双稳态压电俘能器的分布参数模型,基于谐波平衡法对其工作特性进行了分析。然而在激励强度较弱时,双稳态压电俘能器很难突破势垒进入阱间运动。于是,Zhu等设计了一种磁力式三稳态压电俘能器,通过实验证明其在低强度激励时的俘能效果要明显优于双稳态压电俘能器。Cao等分析了势阱深度对三稳态压电俘能器性能的影响,发现较浅的势阱可以提高系统在低强度激励下的有效工作频带宽度。Zhou等基于谐波平衡法对三稳态压电俘能器的稳态动力响应进行了分析。以上关于三稳态压电俘能系统的调参优化均为对力电耦合方程中各项系数大小的直接调节。
基于上述不足,本文利用广义Hamilton原理建立了磁力式三稳态压电悬臂梁俘能器的分布参数模型,并基于多尺度法获得了该系统稳态响应的解析表达式。针对两种典型的压电材料,研究了初始起振点位置,压电常数和介电常数等对三稳态压电俘能系统性能的影响。
1 三稳态压电俘能器建模
如图1所示,压电悬臂梁由金属基层和压电层组成,一对压电层粘附在基层的上、下表面。梁左端固定在一个可振动的基座上,自由端固定一块永磁铁,另有两块永磁铁对称固定在梁外侧的支架上。梁自由端磁铁和外侧磁铁形心之间的水平距离为d,两外侧磁铁形心之间的竖向距离为2d。悬臂梁的长度为l,宽度为b。基层的厚度为h,单个压电层的厚度为t,外接回路的负载电阻为R。以水平方向为x轴,竖直方向为y轴。
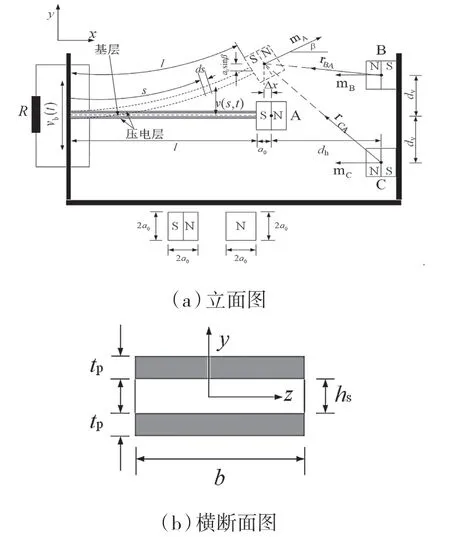
图1 压电悬臂梁俘能结构模型
ν
(t)表示基座振动时的位移,s为沿梁中性轴方向的坐标。ν
(s,t)表示梁s处相对于其固定端的位移,基层和压电层的本构关系如下:

系统的拉格朗日函数如下:

式中:T代表动能,U代表应变能,W代表电场的电势能,U代表磁力势能,分别表示如下:

ν
(l,t)表示梁s=l处的位移;m为单位长度梁的等效质量,m=2ρ
tb+ρ
hb,其中ρ
和ρ
分别为压电层和基层的密度,M为梁端磁铁的质量。
式 中:h=h/2,YI=YI+YI,YI和YI分 别 表示基层和压电层的抗弯刚度。

利用伽辽金法且只考虑一阶模态

φ
(s
)η
和)η
(t
)分别为梁的第1阶模态振型函数和广义模态坐标,振型函数的计算见文 献[10]。根据文献[6]的磁偶极子模型,以η
(t
)为自变量对U在η
(t
)=0处进行泰勒展开,可得:


μ
=4π
×10H
·m
,M
、M
、M
分别为磁铁A、B和C的磁化强度,V
、V
、V
分别为磁铁A、B和C的体积。利用式(7)将方程(2)代入拉格朗日变分方程:


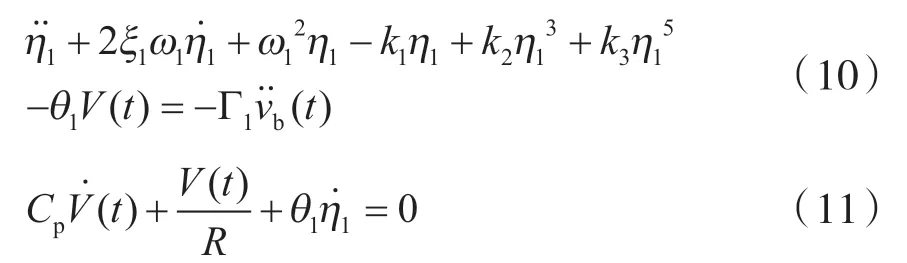




则方程(10)和方程(11)可化为:


2 多尺度法求解
系统的总势能函数为:



图2 三稳态势能曲线
引入小参数ε
和新的时间变量T
,T
,T
,…,即
τ
的导数为
D
为偏微分算子∂∂/T
的记号。系统位移和输出电压响应分别为

ε
阶,即:
将式(18)代入式(12),得


为了表示激励频率和内侧势阱线性化固有频率之间的接近程度,设

ε
的二阶及以上项,并令ε
、ε
的系数分别为零,参照作者之前工作中的推导,可得


仅取一项,阱间和内侧阱内运动方程的稳态解为:


P
为:
解的稳定性可根据Routh-Hurwitz方法判定。
3 计算结果分析
本节重点分析和讨论磁铁间相对位置,内、外侧阱深,压电常数和介电常数等对系统性能的影响。系统的物理参数如下:

3.1 内、外阱深及初始起振点对系统响应的影响
为了研究ΔU和ΔU对三稳态系统响应的影响,图3给出了ΔU不变ΔU依次减小(case1,case2,case3)以及ΔU不变ΔU依次减小(case1,case4,case5)两种情况下的系统势能曲线。由图3可知,当ΔU不变时,随着ΔU的减小,内侧阱宽增大,外侧阱宽减小,三稳态系统逐渐退化为单稳态系统。而当ΔU不变时,随着ΔU的减小,内侧阱宽减小,外侧阱宽增大,三稳态系统逐渐退化为双稳态系统。
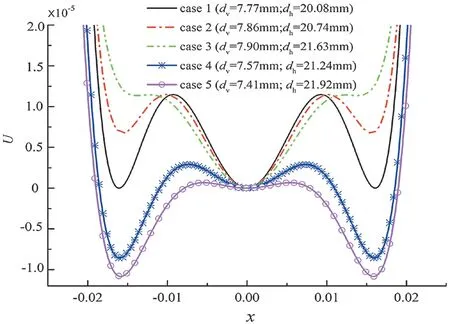
图3 case1~case5势能曲线
取激励频率ω
=0.8,初始激励力幅f=0.0015,初始速度x
和初始电压V均为零,图4、图6和图8所示分别为case1、case2和case4系统从各自势能曲线的平衡点1和3处(分别对应左侧和内侧阱底)起振的相图,图5、图7和图9为相应的位移时程图。case1的内、外侧阱深相同,由图4和图5可知:当从平衡点1起振时,case1仅能在左侧阱底做小幅阱内运动。而当起振位置为平衡点3时,由于激励频率接近case1的内侧势阱固有频率(ω
=0.77),case1能越过势垒做大幅阱间运动。
图4 不同起振位置的case1相图 (a)平衡点1,(b)平衡点3

图5 不同起振位置的case1位移时程图 (a)平衡点1,(b)平衡点3
case2的内侧阱深与case1相同,而外侧阱深小于case1。图6(a)和图7(a)表明:从平衡点1起振时,阱深较浅的case2在经历短时间的混沌运动后跳出左侧势垒进入内侧势阱做小幅运动。比较图4(b)、图5(b)和图6(b)、图7(b)可知:从平衡点3起振时,case1与case2在稳态时均可做大幅阱间运动,但由于case2的内侧势阱固有频率(ω
=0.72)和激励频率之间的偏差稍大于前者,于是它在进行大幅阱间运动之前经历了更长时间的混沌运动状态。
图6 不同起振位置的case2相图 (a)平衡点1,(b)平衡点3

图7 不同起振位置的case2位移时程图 (a)平衡点1,(b)平衡点3
case4的外侧阱深与case1相同,而内侧阱深小于case1。由图8和图9可以看出,case4从平衡点1和3处起振时,初始阶段均处于混沌运动状态。稳态时前者进入左侧阱内做小幅振动,后者则摆脱势阱束缚进行大幅阱间运动。
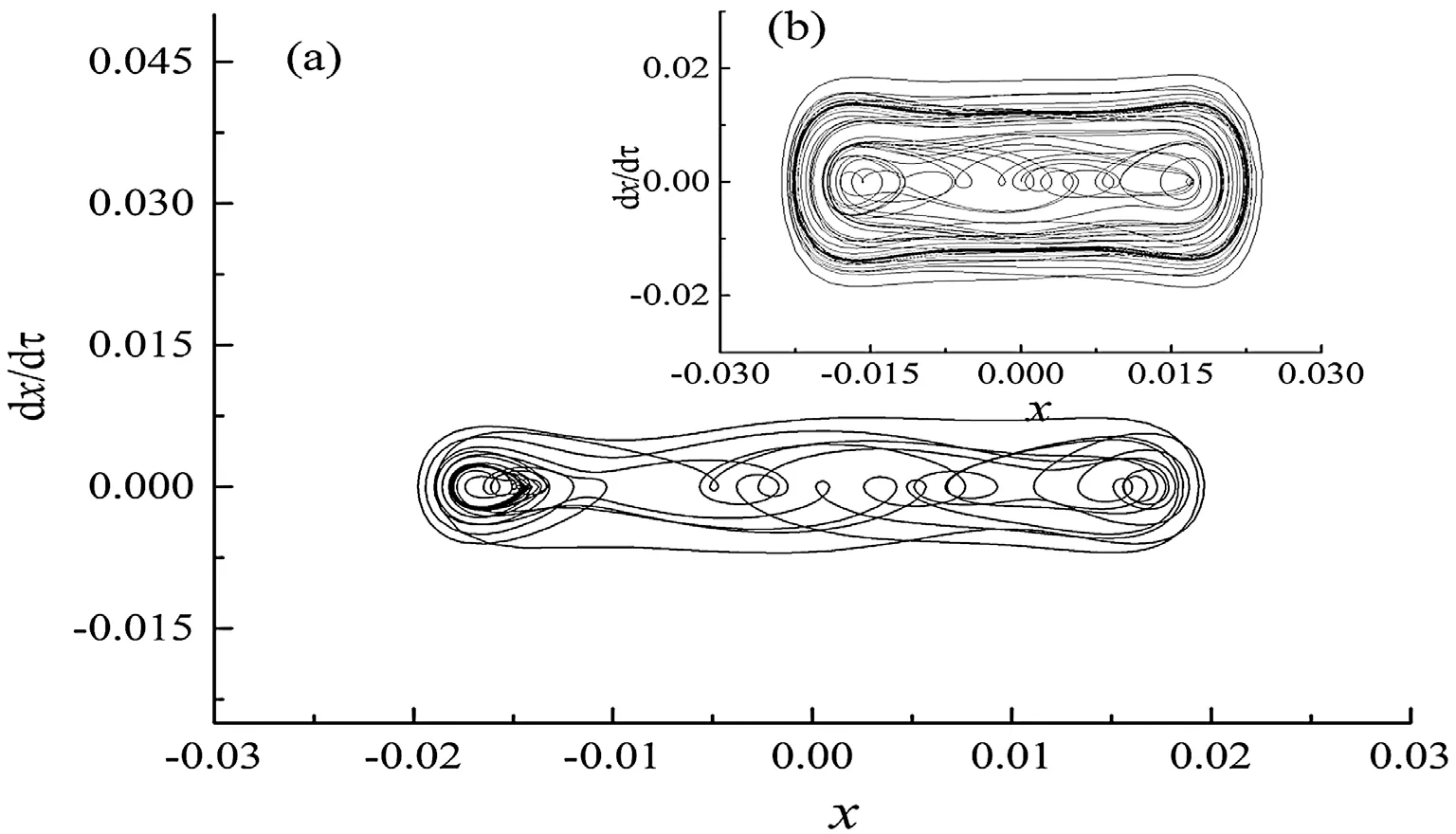
图8 不同起振位置的case4相图 (a)平衡点1,(b)平衡点3

图9 不同起振位置的case4位移时程图 (a)平衡点1,(b)平衡点3
为了利用多尺度法研究系统的稳态响应情况,取负载电阻R
=200 kΩ,f
=0.0025,图10和图11所示为固定ΔU改变ΔU(case1,case2,case3)以及固定ΔU改变ΔU(case1,case4,case5)两种情况下的系统位移和输出电压幅值频响曲线,其中实线部分表示稳定解,虚线部分表示不稳定解。图10表明:对于给定的足够大的激励力幅,存在一个临界激励频率,当ω
小于该临界值时,系统只产生阱间运动,该临界频率随着ΔU(ΔU相等)或ΔU(ΔU相等)的减小而减小。当ω
大于该临界值时,系统进入多解区间,此时随着ω
的增大,阱间位移增大而内侧阱内位移减小。之后随着ω
的进一步增大,阱间运动消失。从图10和图11还可看出,ΔU(ΔU不变)或ΔU(ΔU不变)越小,则阱间运动的频带宽度越小,位移峰值越大。图10将利用多尺度法求出的解析解与利用MATLAB中的ode45求出的数值解进行了对比,结果表明,对于稳定解两者的计算结果吻合良好。
图10 不同工况下位移幅值频响曲线

图11 不同工况下输出电压幅值频响曲线
3.2 材料参数对系统响应的影响
为了研究压电常数d
对系统俘能效果的影响,假定PZT-5A和PZT-5H的其它各项特性参数不变,取d
=8mm,d
=21mm,f
=0.0025,R
=100 kΩ。图12(a)给出了两种激励频率(ω
=1,ω
=2)下PZT-5A和PZT-5H悬臂梁的阱间稳定输出功率幅值随d
变化曲线,可以看出:ω
不变时,两种压电材料的阱间稳定输出功率幅值均随着d
的增加而增大。ω
越大,输出功率幅值增大越快;当d
增大到一定程度时,阱间运动消失,且ω
越大,阱间运动消失的越早,这是由于随着d
的增大,较多的俘获能量抑制了梁的振幅;在单独改变d
大小的过程中,PZT-5A的阱间俘能表现要优于PZT-5H,因为前者有着较小的介电常数。图12(b)所示为PZT-5A和PZT-5H梁的阱间峰值功率随d
变化曲线,由图可知两种压电材料的阱间峰值功率随着d
的增大均表现出先增大后减小的变化趋势,当d
较大时,PZT-5H梁能产生更大的峰值功率。
图12 阱间运动输出功率随压电常数变化曲线

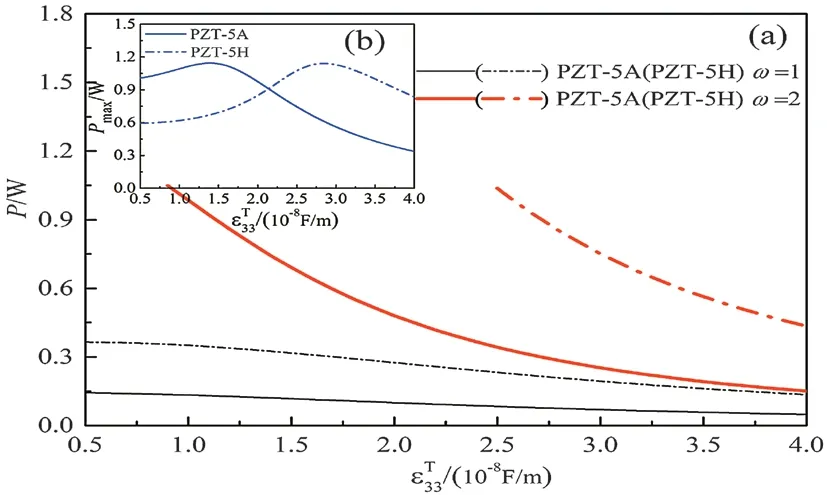
图13 阱间运动稳定输出功率随介电常数变化曲线


图14 阱间运动最优负载电阻随压电常数变化曲线

图15 阱间运动最优负载电阻随介电常数变化曲线
4 结论
(1)根据激励频率和力幅的大小,通过选取合适的起振位置或者调节磁铁间距来改变内、外势阱深度,均可使三稳态系统突破势垒障碍,产生大幅阱间运动。
(2)单侧阱深相同时,随着另一侧阱深的减小,阱间频带宽度减小,而位移和电压幅值增大。根据不同的激励条件,通过改变磁铁间距形成合适的内、外阱深,可提高系统俘能效率。
(3)阱间稳定输出功率幅值和最优负载阻抗均随着d31的增加而增大,随着的增加而减小。过大的d31或过小的均会抑制梁的振动,从而使系统无法进入大幅阱间运动。
猜你喜欢
装备维修技术(2022年7期)2022-07-01
教育教学论坛(2019年27期)2019-07-30
居业(2018年5期)2018-10-24
现代职业教育·职业培训(2018年9期)2018-05-14
中国新技术新产品(2018年22期)2018-01-05
筑路机械与施工机械化(2016年12期)2017-01-13
现代经济信息(2016年8期)2016-12-26
现代企业文化·理论版(2016年19期)2016-12-21
中学生数理化·八年级物理人教版(2016年5期)2016-08-26
花样盛年(2014年12期)2014-12-11
