
反馈式多线谱主动隔振控制算法研究
2022-01-14 01:40张庆伟俞翔杨理华
中国舰船研究 2021年6期
张庆伟,俞翔,杨理华
1 海军工程大学 动力工程学院,湖北 武汉 430033
2 海军工程大学 舰船与海洋学院,湖北 武汉 430033
3 海军潜艇学院 动力操纵系,山东 青岛 266199
4 中国科学院 声学研究所 噪声与振动重点实验室,北京 100190
0 引 言
舰船机械设备运转产生的振动会在海水中形成复杂的低频线谱噪声[1],该类噪声是反潜设备探测的主要目标特征。主动隔振可以有效抑制低频振动,目前国内外已展开诸多研究[2-4]。
在算法领域,传统滤波最小均方(filter-X least mean square, FXLMS)算法因结构简单且易于实现而被广泛应用[5],但对多线谱复杂激励等情况难以实现有效控制。为此,赵洪亮等[6]提出一种选频有源控制算法,通过构造二阶正交滤波结构实现了对多个线谱的控制。李彦等[7]提出一种多通道窄带Fx-Newton控制算法,用带通滤波器提取多个线谱分别予以控制。高伟鹏[8]提出一种变步长的小波包自适应算法,将采集信号分解到不同带频上实现了多频信号控制。然而,上述算法都依赖具有精确频率的参考信号,在工程中存在传感器不易安装和通道耦合等问题,使得参考信号难以采集或者存在误差,即参考信号失配,从而影响控制效果。为此,张志谊[9]提出了通过测量信号自相关序列获得信号频率,翟晓军等[10]提出了利用快速傅里叶变换(FFT)方法对信号进行频谱估计。但是,上述算法均存在估计误差较大的问题,难以合成信噪比较高的参考信号。研究表明,基于自适应陷波器频率估计方法能够准确实现,且其陷波特性适合进行线谱控制[11-13]。
基于上述研究,本文将提出一种基于自适应陷波器的反馈式多线谱控制算法,即首先将误差信号通过级联自适应陷波器,根据自适应算法更新陷波器参数,以估计多个信号频率,进行相位补偿并合成各参考信号。然后,将信号进行Hilbert变换得到另一路参考信号。最后,进入并行控制器完成幅值的更新,实现多线谱振动抑制,以解决参考信号失配的问题。
1 反馈式多线谱控制算法
1.1 陷波器原理
陷波器是一种特殊带阻滤波器,可以实现对特定频率分量的剥离,但对其他频率分量的影响较小,图1(a)所示为其幅频特性。陷波器结构通常可用二阶IIR (infinite impulse response)滤波器表示,其传递函数为
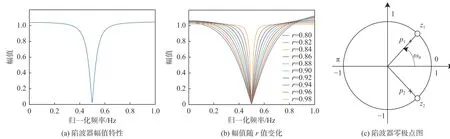
图1 IIR陷波器结构图Fig.1 IIR notch filter structure diagram

式中:a为与陷波归一化频率相关的参数;r为小于且接近1的常数,可以影响陷波3 dB带宽。其中,r值越大,陷波张口越窄,即3 dB带宽越小,效果越理想。陷波幅值(陷波器的放大系数)随r值变化图如图1(b)所示。
实现陷波需要满足2个基本条件:传递函数零点须在单位圆上,使在陷波频率处陷阱深度无穷大;传递函数极点应与零点相匹配,使其他频率成分不受影响,其零极点分布如图1(c)所示,一对极点pi和 零点zi的关系为

设在z平面单位时间走过的角度 ±ω0处有一对共轭零点z1,2=e±jω0,根据式(2)可得p1,2=r·e±jω0,其传递函数可以表示为

将式(1)和式(3)进行系数配比,得到

1.2 频率估计
根据式(4)陷波器传递函数相关参数a与角频率ω0之间的关系,设定a便可实现对特定频率的识别并提取。为避免上阶陷波器估计误差对下阶频率估计造成影响,用各阶陷波器的自身误差εi(n) 对 其传递函数的参数ai(n)(n为迭代次数)进行调整,以保证对激励频率精确估计。N阶级联自适应陷波器结构如图2所示,图中k为第k个陷波器,vi(n)为各级陷波器的输入信号。
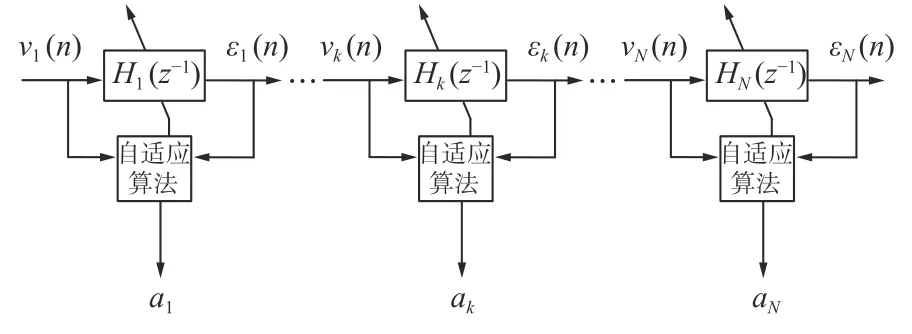
图2 N阶级联自适应陷波器结构Fig.2 N-level cascade adaptive notch filter structure
由自适应算法写出迭代公式如下:

式中:µi为 迭代步长; ∇i(n)为均方误差梯度算符,即

根据式(1)输入输出关系,可写为

将式(7)展开,可得

对式(8)关于ai(n)求偏导,得到
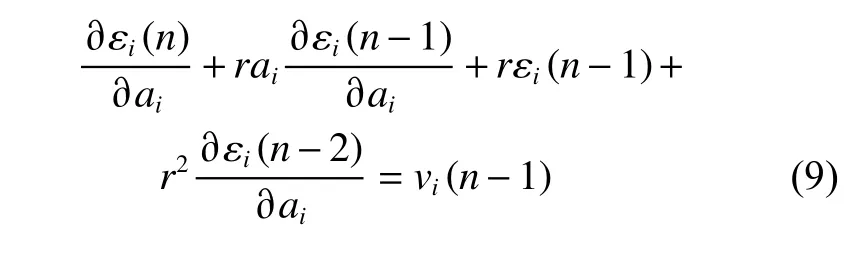
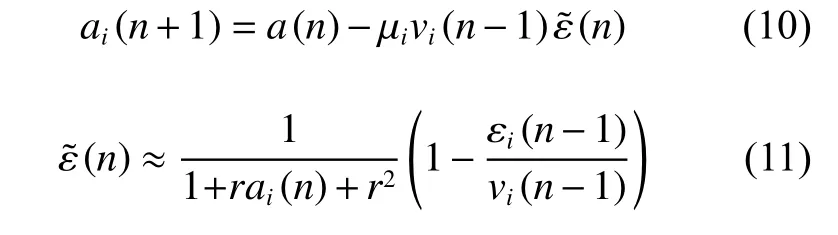
联立式(5)~式(9),得到线谱频率估计公式:
1.3 线谱窄带控制算法
若参考信号难以采集或者信噪比较大,将不利于前馈算法的开展和振动的有效控制。根据激励信号通过线性时不变(linear time-invariant, LTI )系统(初级通道P(z)为LTI系统)时其响应具有频率保持性的特点,可基于反馈式控制结构从误差信号提取频率信息来实现自适应控制。
本文所提算法框图如图3所示,该算法是将误差信号经级联自适应滤波器输出ai(n)进入信号合成器。该算法中,相位信息对于振动控制的实现同样至关重要。在与参考信号相位值存在误差的情况下,算法控制效果较差,甚至会失效,故应对合成信号进行相位补偿。基于二阶自回归模型对参考信号xi1(n)进行调节[14],即根据式(12)来实现对未知参考信号的相位估计。

图3 反馈式多线谱控制算法框图Fig.3 Block diagram of feedback multi-line spectrum control algorithm

同时,对xi1(n)这一路参考信号进行Hilbert变换,得到另一路参考信号xi2(n)

式 中:Hilbert变 换H[xi1(n)]是 冲 激 响 应 为h(t)=1/πt的LTI系统,是实现90°相移的全通滤波器,适用于窄带信号;τ为积分变量。
两路合成参考信号分别进入控制滤波器进行幅值更新,输出信号表示为

式中,wi1(n)为第i个控制器权系数矢量。
各控制单元总输出为

残余信号e(n)为

式中:d(n) 为 期望信号;sj为 真实次级通道的M阶系数。
在实际中,次级通道的传递特性是未知的,故在控制前需对次级通道进行离线辨识。采用相同M阶数的有限冲激响应(finite impulse response,FIR)建模滤波器进行估计,得到的辨识模型如下:

根据最小方差(least mean square, LMS)算法,得到控制滤波器权系数wi(n)迭代公式为:

2 仿真分析
对频率估计窄带控制算法的性能开展了仿真验证。将单通道主动隔振试验测得的数据转化为600,200阶横向FIR滤波器系数,作为初级通道和次级通道脉冲响应的函数,图4所示为其幅值特性。
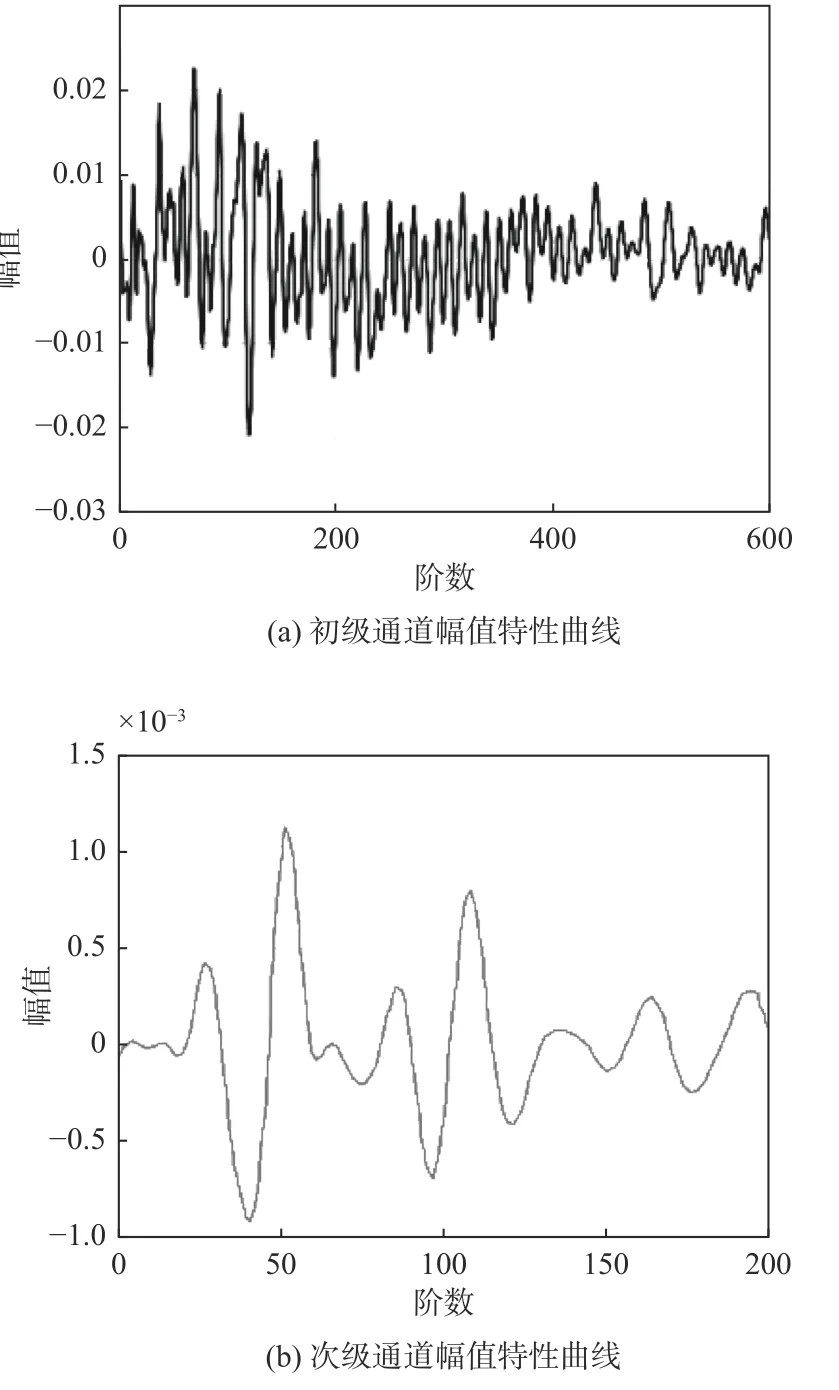
图4 初级通道和次级通道传递函数幅值图Fig.4 Amplitude diagram of transfer function of the primary and secondary channels
采用频率分别为30,37,60和110 Hz幅值均为1的四谐波信号,叠加信噪比20 dB白噪声作为参考信号,采样率为10 kHz,各LMS滤波器为300阶横向FIR滤波器。两种算法的迭代步长均调整到最佳值,级联自适应陷波器阶数N设为4。以残余信号加速度响应作为评价标准,开启主动控制前、后的信号落幅即为隔振效果。图5~图9所示为算法仿真结果相关图。
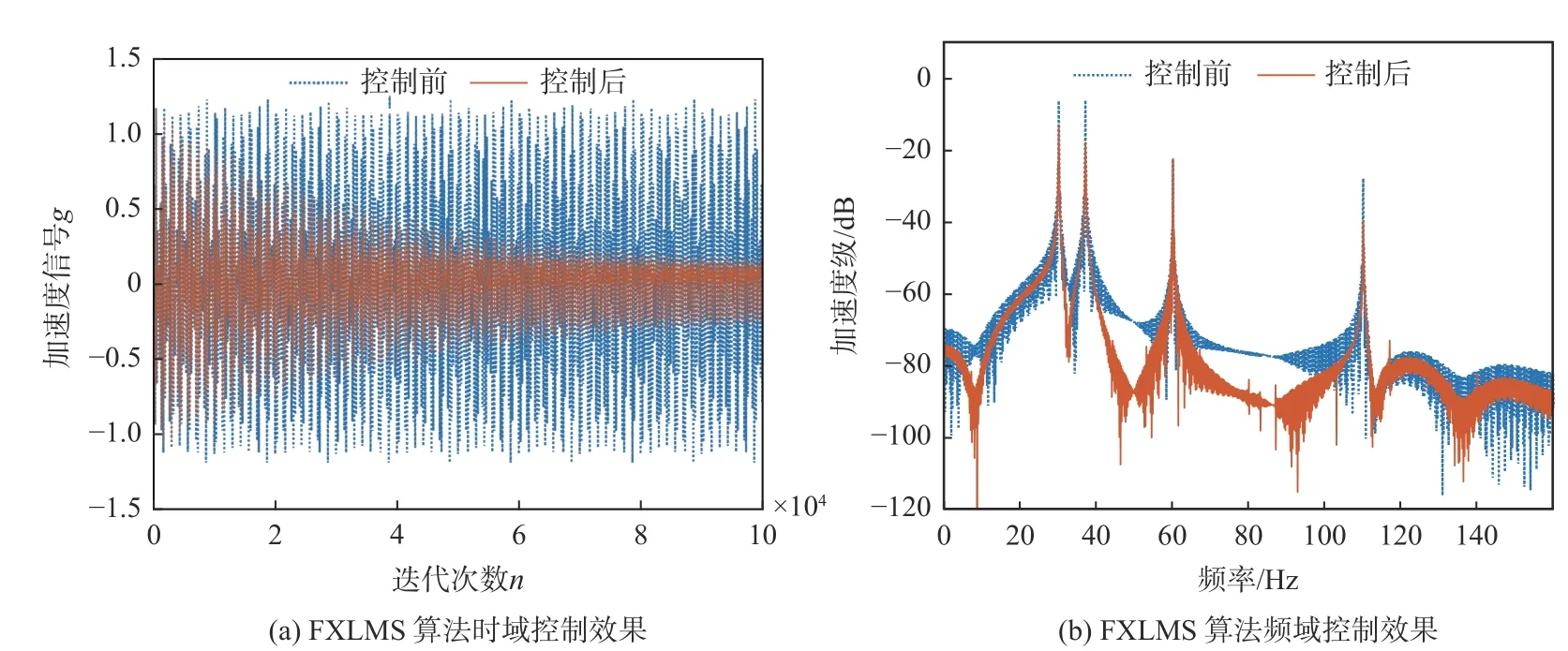
图5 FXLMS算法仿真结果Fig.5 Simulation results of the FXLMS algorithm
图5中FXLMS算法迭代到6万次时才完成收敛,在时域上残余信号降低75%,在频域上对30,37,60和110 Hz振动线谱分别仅有7.17,11.95,0和8.81 dB的幅值衰减,控制效果较差。由图6可见,反馈式线谱控制算法针对多频信号控制效果较好,残余信号迭代到2万次时就完成收敛,且幅值降低90%以上。频域上对30,37,60和110 Hz线谱幅值分别降低了23.45,30.52,22.87和38.08 dB,各振动线谱衰减情况如表1所示。

图6 反馈式多线谱控制算法仿真结果Fig.6 Simulation results of feedback multi-line spectrum control algorithm
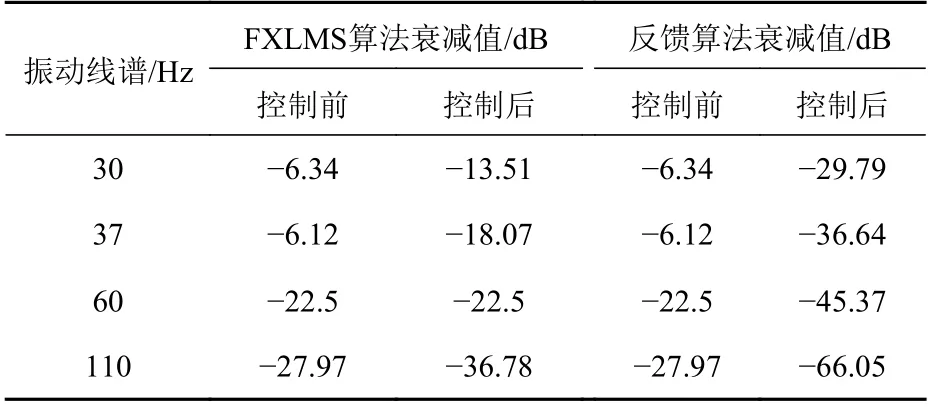
表1 仿真中两种算法振动衰减Table1 Vibration attenuation of two algorithms in simulation
从图7可以看出,算法迭代到5千次左右就基本完成了对频率信息的精确识别,且实现了对频率的实时跟踪。图8所示为原始信号与合成信号的时历曲线。由图可见,在未对相位进行补偿时,合成信号与原始信号之间存在相位差,在补偿后,合成信号可以较好地与原始信号吻合。图9所示为本文所提算法和FXLMS算法控制器输出信号图。由图可见:FXLMS算法针对多频激励,其输入信号的自相关矩阵特征值分布较广,收敛效果较差;而反馈式多线谱控制算法将不同频率信号进入并行控制器处理,从仿真结果看控制效果较好。

图7 振动线谱频率估计图Fig.7 Frequency estimation diagram of vibration line spectrum

图8 原始信号与合成信号相位补偿前/后时历曲线Fig.8 Time history of original signal and synthetic signal before and after phase compensation

图9 本文算法与FXLMS算法输出信号图Fig.9 Output signal diagram of the algorithm in this paper and the FXLMS algorithm
3 主动隔振试验
为进一步验证算法可行性,本研究采用NI PXI搭载RT系统进行了主动隔振试验。试验对象为电磁激振器及附加配重,用以模拟中小型机械设备。设备主要有NI LabVIEW控制系统、Copley Xenus伺服驱动器、PCB加速度传感器、电磁激振器、以及主被动一体化隔振器、WYK-20040K直流稳压稳流电源等。主被动一体化隔振器为自主研制,在低频激励范围内输出力与输入电流之间呈线性关系。试验现场图及示意图如图10所示。试验台架分为上、下两层,其中上层装有电磁激振器,下层板固定在地面上。下层板4个角位置设有立柱导轨,上层板通过滚珠轴承与立柱形成滑动配合。一体化隔振器与上、下层板的安装由螺栓连接固定。
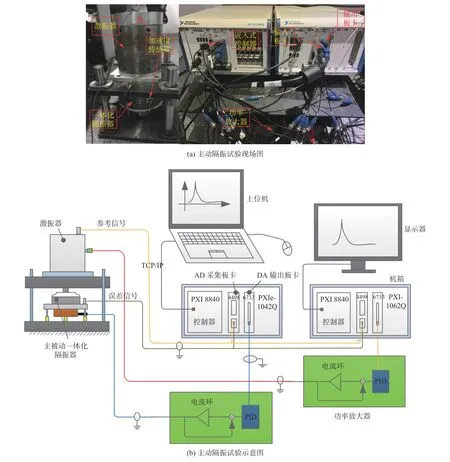
图10 主动隔振试验现场图及示意图Fig.10 Test site diagram and schematic diagram of active vibration isolation experiment
加速度传感器采集振动源激励信号和下层误差信号(其中,振动源信号为FXLMS算法的参考信号,下层误差信号为残余振动),经PXI 4498 AD采集板卡进入PXI 8840自适应控制器。输出控制信号经PXI 6733 DA输出板卡进入功率放大器,然后驱动主被动一体化隔振器产生次级振动来抑制初级振动。上位机通过TCP/IP通信线与PXIe-1042Q机箱相连,将算法程序配置到下位机来控制作动器输出力。PXI-1062Q控制激振器的运行及振动信号的采集,以便实时监测及后期处理。
由信号发生器产生30,37,60,110 Hz四谐波信号作为初始激励信号,控制滤波器长度均为300阶,各算法迭代步长调整到最佳值。其中,采样频率设定为10 kHz,既可满足采样定理,又保证了对信号的实时跟踪。针对AD板卡采集信号存在的50和100 Hz工频干扰,试验中设计了Butterworth带阻滤波器进行滤除。以下层误差信号传感器采集的加速度响应作为评价标准,开启主动控制前、后的信号落幅即为隔振效果。得到时、频域控制效果如图11和图12所示。
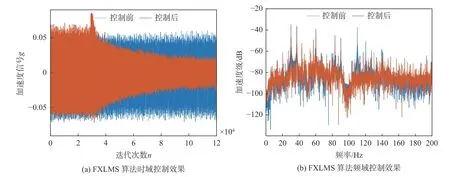
图11 FXLMS算法试验结果Fig.11 Experimental results of the FXLMS algorithm

图12 本文算法试验结果图Fig.12 Experimental results of the algorithm in this paper
从图11(a)得到的残余振动信号在开启控制后6 s实现收敛,速度较慢,幅值仅降低了70%;图11(b)频域中对30,37,60和110 Hz振动线谱分别有11.28,5.03,5.33和29.92 dB的幅值衰减,其中对30和110 Hz线谱控制效果较好,而对37和60 Hz线谱控制效果较差。图12(a)得到残余振动信号在开启控制后2 s就实现收敛,速度较快,幅值降低了90%左右;图12(b)频域中对30,37,60和110 Hz振动线谱分别有19.91,25.93,20.28和31.39 dB的幅值衰减,控制效果较好。各振动线谱衰减情况如表2所示。通过开展多线谱主动隔振试验,验证了所提算法的有效性。
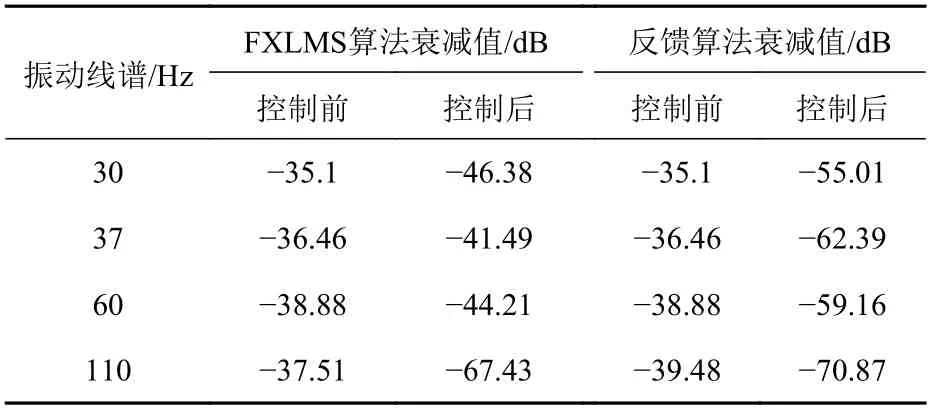
表2 试验中两种算法振动衰减的比较Table2 Comparison of vibration attenuation by two algorithms in experiment
4 结 语
本文针对多线谱振动和参考信号失配的问题,提出了一种反馈式多线谱控制算法。首先,使误差信号通过级联自适应陷波器,根据自适应算法更新陷波器参数,以估计多个信号频率;然后,进行相位补偿合成各参考信号,再将信号经Hilbert变换得到另一路参考信号;最后,进入并行控制器完成线谱控制。
通过对该算法的仿真和试验,实现了对30,37,60和110 Hz激励信号的精确辨识,合成了可靠的参考信号进入算法,并对各线谱有20~40 dB的幅值衰减;
本文所提算法较好地解决了振动控制中参考信号失配和多线谱振动的问题,有效减弱和抑制了低频振动能量的传递。
猜你喜欢
客联(2022年4期)2022-07-06
装备维修技术(2022年7期)2022-07-01
成都信息工程大学学报(2022年2期)2022-06-14
中国测试(2018年9期)2018-05-14
中国新技术新产品(2018年22期)2018-01-05
筑路机械与施工机械化(2016年12期)2017-01-13
科技视界(2016年2期)2016-03-30
电子产品世界(2016年3期)2016-03-29
智能计算机与应用(2016年1期)2016-03-02
