重型商用车自动紧急制动策略研究
2022-01-11 08:27吴桐韩同群倪雅蓓
湖北汽车工业学院学报 2021年4期
吴桐,韩同群,倪雅蓓
(1.湖北汽车工业学院 汽车工程学院,湖北 十堰 442002;2.东风汽车集团有限公司 技术中心,湖北 武汉 430056)
自动紧急制动系统(automatic emergency broking,AEB)是高级驾驶辅助系统的重要组成部分,可以提高车辆的主动安全水平,该系统检测前方的碰撞危险程度,向驾驶员发出信号,若驾驶员没有及时应对,系统会自行制动,使车辆的速度降低,从而避免发生碰撞。随着GB/T38186—2019、JT/T1242—2019、JT/T883—2014等标准的实施,重型商用车配置AEB系统将成为必然。张勇刚[1]等综合考虑驾驶员的个性差异,建立了不同行驶工况下的最小安全距离模型,解决了不同环境中最小安全距离不准确的问题。杨为等[2]提出了一种上层模糊控制、下层PID控制的分层行人避撞控制策略。唐阳山等通过采集不同驾驶员的反应时间建立仿真,发现不同驾驶员反应时间对安全距离有较大的影响[3]。目前制定的AEB算法主要有2种:一是基于安全距离模型,如Mazda模型、Honda模型、Berkeley模型等;二是基于碰撞时间模型。传统的碰撞时间模型会出现减速过多和制动结束时与前车距离过大等问题。避撞算法应避免过早地介入制动,还要达到避撞的目的。文中在碰撞时间模型的基础上,引入了相对加速度,建立了新的碰撞时间模型,提出了一种碰撞时间模型与安全距离相结合的分层控制策略,使车辆制动结束后与前车距离更智能。最后通过TruckSim和MATLAB/Simulink联合仿真进行验证。
1 AEB总体仿真方案
为了更好地验证策略的有效性,以TruckSim和MATLAB/Simulink软件联合仿真的方式进行验证,在TruckSim软件中建立车辆动力学模型以及仿真场景,在MATLAB/Simulink软件中搭建策略的控制算法模型,仿真的总体方案如图1所示。
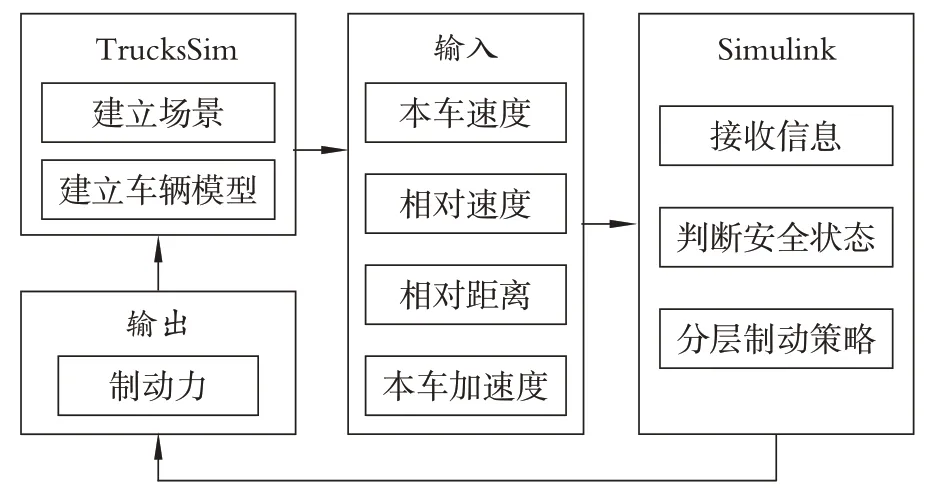
图1 总体仿真设计方案
AEB策略的研究主要由两部分构成,一是对控制策略的研究与模型的搭建,二是测试场景的建立[4]。中国新车评价规程(China new car assessment program,C-NCAP)规范了AEB系统的测试内容。文中采用分层控制的思想完成对AEB策略的设计,上层控制器基于改进的碰撞时间模型(timeto-collision,TTC)对当前车辆的行驶状态进行判断,并根据车速和TTC阈值对减速度进行决策;下层控制器根据上层控制器输出的望制动减速度与车辆信息计算出期望制动安全距离,通过PID控制调节主缸制动压力来对车辆进行控制。最后根据2021版C-NCAP中关于AEB系统的规章测试方案进行仿真计算,评价策略的有效性。
2 制定控制策略
2.1 TTC模型
TTC模型是指两车发生碰撞所需的时间。通过计算自车和目标车之间的碰撞时间,设置相应的碰撞时间阈值,当两车的碰撞时间低于设定的阈值时开始制动[5]。传统TTC模型公式如下:

式中:D为自车与目标车的相对距离;vrel为目标车的相对速度。车辆行驶时工况种类复杂,故提出一种基于前后两车相对加速度的TTC算法,更加适用于多种工况。TTC的计算应与自车、前车的行驶信息如自车行驶速度v1、前车行驶速度v2、相对速度vrel、相对加速度arel有关,所以

根据前车在碰撞时是否停止,将D的计算分为2种情况,判断指标为前车开始制动到制动停止需要的时间tc,即

假设碰撞发生时前车处于运动状态,即tc>TTTC:

将得出的TTTC在判断条件中验证,若满足条件则停止计算,若不满足则按照另一种情况计算:

当碰撞发生时前车处于静止状态,此时tc小于TTTC,则式(3)可简化为

则式(6)可变为

当自车和前车都是匀速运动时,即a1=a2=0时,则

可以看出,在传统碰撞时间模型的基础上考虑了前后车的加速度。前车车速大于自车车速时,没有追尾危险,所以只考虑TTTC值大于0的情况。
2.2 安全距离模型
当自车发现危险并即将开始制动,此时与前车距离为S,自车开始制动到停止制动的时间内,自车驶过的距离为S1,前车行驶的距离为S2,制动停止时两车之间的距离为d0。最小安全距离为

AEB系统是作用于自车与前车在同向行驶时,车辆紧急制动的效果与制动距离有着直接的关系,所以需要分析当驾驶员察觉到前方道路情况后,踩下制动踏板至踏板最大行程,使车辆进行制动直至最后停车的过程[6]。当驾驶员发现前后出现紧急情况时,察觉到需要制动的时间为t1′,右脚从油门踏板移动到制动器踏板的时间为t1″,(t1′+t1″)为驾驶员反应时间t1,一般为0.3~1.0 s;制动器作用时间为t2,由于零件之间存在间隙,消除间隙时间为t2′,制动踏板的行程达到一定程度后,制动器的制动力开始增加,这一过程所需时间为t2″,(t2′+t2″)为制动器作用时间,一般为0.2~0.9 s;当制动踏板行程达到最大时,制动力也随之达到最大,保持到车速下降至0km·h⁻¹,称为持续制动时间;当危险消失,驾驶员将右脚从制动踏板移开,制动力不能马上卸掉,这一阶段为放松制动器阶段[7]。
考虑驾驶员反应时间以及制动器作用时间,这2个阶段均没有减速度产生,时间也较为短暂,故可以认为车辆匀速行驶,最小制动安全距离为

式中:a1为自车减速度;a2为前车减速度;t1为驾驶员反应时间,取0.1 s;t2为制动器延迟反应时间,取0.6 s;d0为最小安全距离。
2.3 制定控制策略
在车辆行驶过程中,上层控制器接受周围环境信息和车辆自身状态信息确定预碰撞时间,以TTC阈值作为有效指标,但不能将TTC阈值设为定值常数,若使用单一的TTC阈值作为危险判断指标,会造成低速时制动提前、高速时制动延后的情况。因此以车速和TTC阈值作为制动策略的判断条件,制定不同减速度的制动策略。NHTSA分析了83名驾驶员在碰撞过程中制动过程,统计出制动过程中平均减速度和最大减速度值如表1所示[8]。表1表明约95%的驾驶员在制动过程中,平均制动减速度达到0.55g(g=9.8m·s⁻²),其中最大制动减速度可达到0.92g,约为平均制动减速度的2倍。文献[9]统计了不同制动减速度下所需要的避免发生碰撞的时间,如表2所示,可以看出在发生碰撞前1.8 s开始以0.5g的减速度制动可避免95%情况下的碰撞。在减速度为0.675g时,1.5 s便可避免绝大多数的碰撞情况。
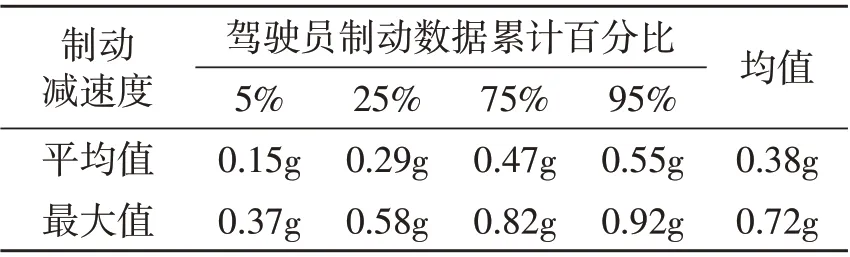
表1 驾驶员制动减速度分布

表2 不同制动强度下所需的避障时间 s
将自车车速分为低、中、高3种车速行驶工况。车速低于20km·h⁻¹为低速行驶工况,车速处于20~50km·h⁻¹为中速行驶工况,车速高于50km·h⁻¹为高速行驶工况。同时满足车速条件与TTC阈值条件时,给出此时的期望制动减速度aexp。根据表1中的制动减速度与表2中的避撞时间,具体制动控制策略如表3所示。将上层决策模块输出的车辆制动状态信息和期望制动减速度值输入到式(10)中,计算出期望最小安全距离。为减小期望最小安全距离与实际最小安全距离之间的误差,选择反馈PID控制器对误差进行控制,由PID控制器和被控对象组成,控制误差e(t)为期望最小安全距离dexp和实际最小安全距离dt之间差值,即

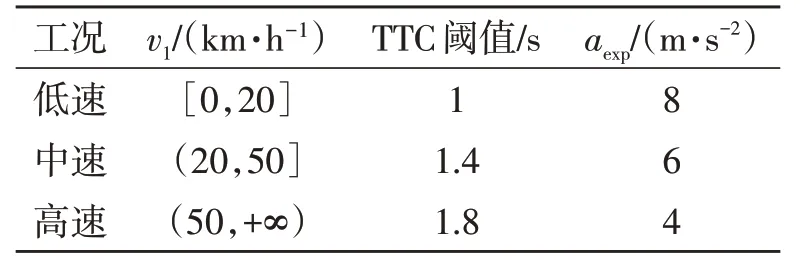
表3 紧急制动策略
PID的控制规律为

其传递函数的形式为

式中:KP为比例增益;TI为积分时间常数;TD为微分时间常数。试凑法求出下层PID控制器的比例、积分和微分参数值分别为4、10、0。
3 联合仿真
3.1 模型搭建
TruckSim软件是专门用于车辆动力仿真的软件,主要由车辆参数与测试场景设置部分、模型计算与求解部分和后处理部分组成。其优势在于计算速度快、可视化效果好、适用于多种车型。某重型商用车的技术参数见表4,在TruckSim软件中建立车辆动力学模型。在Simulink中搭建AEB策略,与TruckSim模块进行联合仿真(图2)。Simulink的输出为车辆制动主缸压力变量。TruckSim模块的输出变量分别为自车车速、自车与前车相对距离、自车与前车的相对速度和自车的加速度。

表4 某重型牵引车基本参数
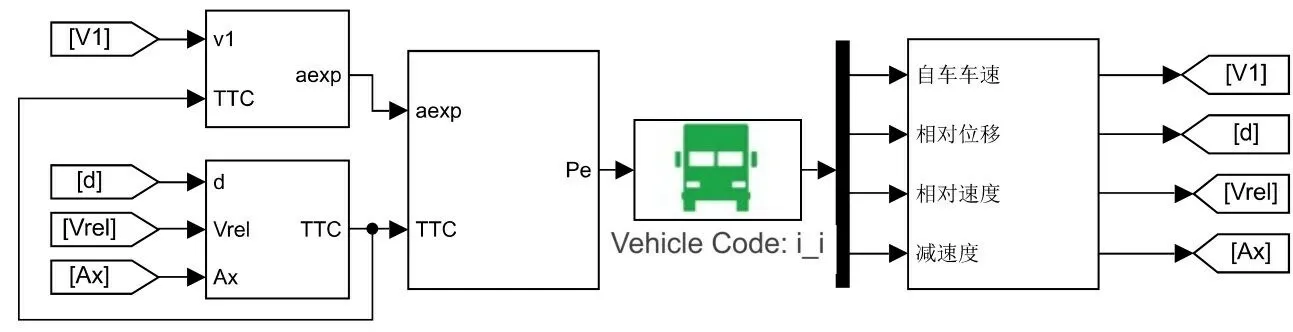
图2 联合仿真结构图
3.2 仿真结果分析
根据2020版C-NCAP规定,AEB系统车车场景测试主要分为前车静止(CCRs)、前车匀速(CCRm)和前车制动(CCRb),参数如表5所示。

表5 C-NCAP测试法规AEB测试工况
1)CCRs工况 自车以40km·h⁻¹匀速行驶,两车初始距离为100m。自车在仿真开始7.7s之内以40km·h⁻¹的速度匀速行驶,7.718s开始制动,施加了约10.4MPa的制动力,产生了约6.47m·s⁻²的减速度,9.64s时完成制动并停车,停止后与前车距离为1.037m。实验结果如图3所示。

图3 CCRs工况仿真结果
2)CCRm工况 自车以50km·h⁻¹匀速行驶,前车以20km·h⁻¹匀速行驶,两车初始距离为100m。仿真开始10.4s之内以50km·h⁻¹的速度匀速行驶,10.51s时开始以10.65MPa的制动力制动,产生了约7.08m·s-2的制动减速度,10.84s时完成制动并停车停止后与前车距离为3.38m。结果见图4。
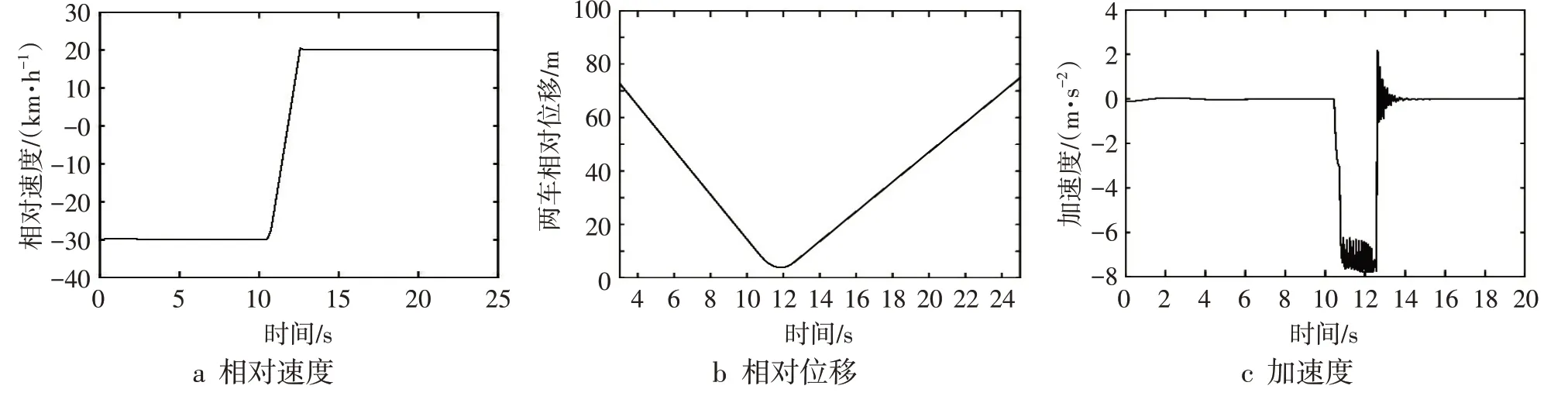
图4 CCRm工况仿真结果
3)CCRb工况 自车以50km·h⁻¹匀速行驶,目标车车速为50km·h⁻¹,并以4m·s⁻²的减速度进行制动,两车初始距离为40m。仿真开始3.6s之内以50km·h⁻¹的速度匀速行驶,3.67s时开始以12.55MPa的制动力制动,产生了约8.8m·s⁻²的制动减速度,5.5s时完成制动并停车,停止后与前车距离为1.508m。仿真结果如图5所示。
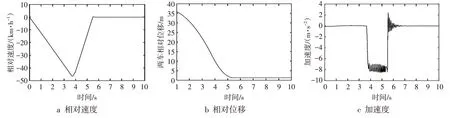
图5 CCRb工况仿真结果
4 结论
基于碰撞时间模型设计了重型商用车自动紧急制动分层控制策略。通过TruckSim与Simulink软件的联合仿真验证了前车静止、前车匀速和前车制动等工况。结果表明该AEB系统在不同工况下,完成制动后与前车的距离保持在1~3.4m,可看出文中分层控制策略在保证安全的前提下缩短了停车后与前车的距离,一定程度上提高了AEB系统的智能性,验证了该分层控制策略的可靠性。
猜你喜欢
能源工程(2022年2期)2022-05-23
现代电力(2022年2期)2022-05-23
消费导刊(2018年10期)2018-08-20
汽车维护与修理(2018年1期)2018-04-04
汽车工程(2017年8期)2017-09-15
作文周刊·小学一年级版(2017年27期)2017-08-10
山东工业技术(2016年15期)2016-12-01
人民交通(2016年9期)2016-06-01
汽车维护与修理(2015年5期)2015-02-28
汽车电器(2014年8期)2014-02-28