“无人机-车辆”配送路径优化模型与算法
2021-12-31 03:52柳伍生李旺周清迭纤
交通运输系统工程与信息 2021年6期
柳伍生,李旺,周清,迭纤
(长沙理工大学,交通运输工程学院,长沙 410114)
0 引言
近年来,电子商务蓬勃发展,一些特殊地区,例如,农村地区、山地城市区域等因为地形环境复杂、交通条件差等原因,物流配送经常受到山水相阻。民用无人机的兴起,为此类问题提供了新的解决方案[1]。民用无人机凭借操作方便、使用灵活、作业效率高、相对成本低等优势[2]发展迅速,传统的配送车辆则有着载重量大,可长距离运输的优势,两者相结合的物流配送方式已成为国内外的研究热点。
由于无人机和车辆各自配送存在诸多限制,两者的结合,需要互相协作,这有别于有容量限制车辆路径问题CVRP(Capacitated Vehicle Routing Problem)和多车型车辆路径问题MTVRP(Multitypes Vehicle Routine Problem),属于兼具两者特点的联合配送问题。
对于此类特殊的路径问题,研究者在进行模型设计时,出发点分为两类。一类是从TSP 出发,例如,MURRAY 等[3]提出的FSTSP(Flying Sidekick Traveling Salesman Problem)和PDSTSP(Parallel Drone Scheduling Traveling Salesman Problem);AGATZ 等[4]提出的TSP- D(Traveling Salesman Problem with Drone)等。随后,在此基础上,YUREK 等[5]设计了求解FSTSP 的两阶段迭代算法,KITJACHAROENCHAI 等[6]改编了FSTSP,并将问题与其他场景进行对比;H. AM[7]扩展了PDSTSP,考虑到无人机能同时在仓库或顾客点进行取货或送货;文献[8]构造TSP-D 的混合整数模型,使其适宜解决更大规模的问题。这些研究通常假设车辆需要在固定点发射和回收无人机,无人机一次仅能配送一个客户点。
另一类是从VRP 出发,例如,WANG 等[9]提出了VRP-D(Vehicle Routing Problem with Drone),考虑到续航能力的限制,无人机可以从仓库或任意客户地点的车辆上进行发射和接收;D.ORLING[10]考虑到无人机的飞行距离和载重的关系,验证了VRP-D 问题中无人机的能量消耗和载重呈线性关系。SCHERME等[11]为有效求解VRP-D问题,基于混合整数线性规划,寻找最优的无人机分配和调度方案。上述研究都是先确定车辆的行驶路径,再分配无人机的飞行路线,而无人机相较于车辆运输更加低碳环保,且成本更低,无人机应承担更多配送任务,实现高效配送。
以往研究通常以时间或成本最小为目标,而无人机飞行速度快,车辆配送中加入无人机,相当于增加了更快速的配送工具,总配送时间应低于传统配送[3,5];在成本上,RAFFAELLO等[2]验证了无人机单位配送成本低于传统配送。随着近年来技术的发展,出现了更多不同规格的配送无人机,需要考虑的成本计算也更加复杂,其全过程成本包括:采购、运营、人力、燃料、维修等,以及地区间和不同环境下的成本差异,但目前还未有明确的商用无人机规范要求,同时,考虑到安全问题,需要配备自动检测和避障功能,会增加成本,更详细的成本计算有待相关法规的完善。
本文基于农村地区的联合配送,考虑了无人机载重量和飞行距离限制,提出车辆不用在固定点等待无人机,无人机单次可以服务多个顾客节点,并构建了一种双层规划模型,通过修改部分参数,模型能同时适用于多种场景;基于扫描法的思想,设计了一种带末端优化的模拟退火算法求解模型,并对考虑的无人机限制因素进行灵敏度分析,以提高满载率和续航利用率,充分利用无人机的配送能力。
1 数学模型
1.1 问题描述
对于特殊地形区域,例如,农村地区、山地城市等,因道路弯曲、坡度大、高低起伏等原因,传统车辆配送十分不便,在部分农田和池塘环绕无路驶入的地区,车辆根本无法进行配送,而无人机配送能无视地面环境,极大的缩短配送距离,且在山水相阻车辆不能进入的农村地区,为实现“最后一公里”配送,无人机有着极大的优势。
联合配送一般指无人机需从车辆上进行取货,送货结束后需返回车辆,车辆可携带无人机进行配送,也可在无人机取货后同步进行其他顾客点的配送,两者依据顾客点的具体特征,协作完成所有顾客点的配送;相对的独立配送,即非联合配送,车辆和无人机无协作,独立完成各自的配送任务。本文设计的两种单无人机、单车辆配送的简易模式如图1所示。
图1(a)中无人机和车辆可分别运载货物离开配送中心,也可由车辆携带无人机一起回到配送中心;车辆在无人机进行配送时,不用原地停留等待,也可同步进行顾客点的配送,无人机单次配送可以同时服务多个顾客点。图1(b)中无人机和车辆分别独立进行配送,中途无交互协作,无人机在一定的限制范围内,可以服务多个客户点,但每次配送结束必须返回配送中心,车辆负责其余节点的配送。图1中标记了超过无人机最大飞行距离的超远点和超过无人机最大载重量的超重点,超远顾客点因无人机无法长距离往返,仅可由车辆完成配送;超重顾客点因无人机无法负载货物,也仅可由车辆完成配送,但联合配送中无人机可在超重点进行发射或者接收。

图1 无人机-车辆配送简易图Fig.1 A simplified diagram of drone-vehicle distribution
基于上述问题,本文做如下假设:
(1)配送中心和顾客点的位置和需求量已知,且配送中心需求量为0;
(2)所有顾客点都必须得到服务,不考虑顾客点的时间窗限制;
(3)无人机的最大载重量和最大续航里程已知;
(4)在满足限制条件下,无人机一次可服务多个顾客点;
(5)不考虑车辆的载重限制和续航限制;
(6)车辆必须先于无人机到达停靠点,无人机不能在停靠点悬停飞行;
(7)无人机每次配送结束后,需返回车辆取货,并进行电池更换;
(8)不考虑顾客点的服务时间和无人机的取货、电池更换时间;
(9)车辆上携带足够的无人机电源。
1.2 参数说明
模型建立过程中使用的参数如下:
S1——节点集合,S1={1,2,…,n,n+1} ,其中,n为顾客需求点数,n+1为配送中心;
S2——顾客需求点集合,S2={1,2,…,n} ;
S3——未服务的顾客需求点集合,初始S3={1,2,…,n} ;
Lm——超过无人机最大载重限制的顾客需求点集合;
Ld——与其他顾客点距离均超过无人机最大飞行距离限制的顾客需求点集合;
C(u)——无人机配送的顾客需求点集合,
——第k次配送,无人机配送的顾客需求点集合;
——车辆配送的顾客需求点集合,
——第k次配送,车辆配送的顾客需求点集合;
Pstart——无人机发射点集合;
Pend——无人机回收点集合;
Pnon——除无人机发射点和回收点外,非停靠点集合;
K——配送总次数,K={1,2,…,k} ;
n——顾客需求点总数;
——第k次配送,无人机配送的顾客需求点数;
——第k次配送,车辆配送的顾客需求点数
mi——节点i的货物需求量;
dij——节点i到节点j的欧式距离;
M——无人机的最大载重量;
D——无人机的最大飞行距离;
v(u)——无人机的平均飞行速度;
v(t)——车辆的平均行驶速度;
ε——道路阻抗系数;
Zk(u)——第k次配送,无人机配送的路径距离之和;
Zk(t)——第k次配送,车辆配送的路径距离之和;
Z——配送完所有节点的路径距离总和;

1.3 模型建立
车辆路径问题研究,较多结合节约法和聚类分析,但这两种方法不能很好地拓展到多车型间需要动态合作,且有载重限制的问题。为使无人机单次可服务多个节点,本文基于扫描法的思想,以总配送距离最小为目标,按以下步骤求解。
Step 1 标记特殊点。
对于所有顾客需求点,车辆均可以进行配送。由于无人机单次飞行有最大载重限制和最大飞行距离限制,因此,将所有顾客需求点中超过无人机最大载重限制的节点标记为Lm;超过无人机最大飞行距离限制的节点标记为Ld。所有标记点仅能由车辆完成配送,但标记为Lm的节点在满足无人机飞行距离限制的条件下,可作为无人机单次到达的终点。

式(1)和式(2)保证标记点必定被车辆配送;式(3)和式(4)表示标记为Ld的顾客点不会被无人机配送;式(5)确保若无人机飞往超重点,车辆必前往超重点;式(6)和式(7)表示无人机和车辆可分别从配送中心独自进出,也可由车辆携带无人机共同进出;式(8)表示车辆每次配送至少服务一个顾客点。
Step 2 单次路径规划。
因无人机的电量限制,在无人机最远可达的飞行距离半径内,且满足无人机最大载重限制的条件下,尽可能多的给无人机分配顾客需求点,以提高无人机的满载率和续航利用率。对于给定飞行半径内,无人机单次配送最多可服务的顾客点是有限的,每次分配完成后记录下单次到达的终点。无人机配送一次后需要补充电量,为安全考虑,不能在停靠点做悬停等待,所以,车辆必须在无人机到达之前到达。以无人机单次路径规划记录的终点为车辆此次配送的终点,在满足提前到达的前提下,尽可能多的给车辆分配顾客需求点。因配送时间限制,车辆单次配送最多可服务的顾客点是有限的。


式(9)是最大化单次无人机和车辆服务的顾客节点数;式(10)保证单次无人机携带的货物重量不超过无人机最大载重量;式(11)保证单次无人机配送总距离不超过无人机最大飞行距离;式(12)和式(13)表示在所有未被服务的顾客节点中,无人机进出该节点不超过1 次;式(14)保证车辆必定在无人机降落前到达;式(15)和式(16)表示在所有未被服务的顾客节点中,车辆进出该节点不超过1 次;式(17)保证每次分配完单次服务的顾客节点后,将其从前1次未服务顾客节点集合中除去。
Step 3 整体路径优化。
以单次配送路径记录的终点为下次配送路径的起点,重复Step 2,直到所有顾客需求点全部配送完毕。将车辆和无人机的配送距离相加,以总配送距离最短为目标函数,优化每次配送的路径选择。


目标函数式(18)为最小化无人机和车辆的总配送距离;式(19)和式(20)表示所有非停靠的顾客节点仅被无人机或车辆配送一次;式(21)和式(22)表示无人机收发节点车辆仅进出一次;式(23)表示无人机发射节点无人机仅飞出一次;式(24)表示无人机回收节点无人机仅降落一次;式(25)和式(26)保证所有节点全部分配完毕,无人机的发射和回收点可为同一节点;式(27)保证无人机对于非停靠点出入流量守恒;式(28)确保车辆对于所有节点出入流量守恒;式(29)和式(30)给出了参数的取值范围。式(6)、式(7)、式(21)~式(24)共同给出了当配送中心作为无人机收发点或非停靠点时的进出规则,无人机可从配送中心发射回收,也可由车辆携带进出,中途无人机和车辆均不会再次访问配送中心。
2 方法
由于设计的联合配送模型属于NP-hard 问题,问题会随节点的增多而成指数级增长,当节点超过10 个时,使用精确算法需要花费大量时间,还无法求解出结果,而启发式算法能在较短时间内求解出很好的结果。所以本文针对联合配送案例特征,采用启发式算法求解问题。
2.1 求解算法
模拟退火算法通过设置不同的控制参数,能有效求解本文所提问题。
(1)控制参数的设置
通过设置不同的控制参数,可以控制模型的降温速率,更好地逼近全局最优解。需要设置的主要控制参数:降温速率q=0.9;链长L=2000;初始温度Tstart=1000;结束温度Tend=0.001。
(2)初始解的生成和编码
采用整数排列的编码方法,随机生成由1~n个整数构成的初始解,每个整数对应1~n个顾客需求点,配送中心为n+1。初始解可划分为几个不同的部分,每个部分,即不同配送趟次的无人机和车辆路径集合。各数字的排列顺序决定对应节点的配送顺序,从配送中心开始,按排列顺序依次将各节点加入到无人机和车辆的配送路径,每加入1个节点,计算是否满足约束条件,未超出条件,则继续加入下1 个节点,直到超出约束范围,进入下一趟次的顾客点分配。重复分配k次,得到所有趟次的配送路径,每趟次配送路径的顺序结合,即总的配送路径。结合式(9)~式(17),单次路径规划的伪代码如算法1所示。
(3)解的变换
通过对当前解进行变换,生成新的路径组合,更新当前解。本文主要采用交换规则有单点交叉和2-opt 变换。单点交叉即随机产生[1,n]区间内的两个整数,将当前解中两个整数对应位置的节点进行对换。2-opt 即随机产生[1,n]区间内的两个整数,将当前解中两个整数对应位置中间部分的节点进行转置。以1~10 为例,假设随机产生的两个整数为4 和7,单点交叉和2-opt 的交换示意如图2所示。
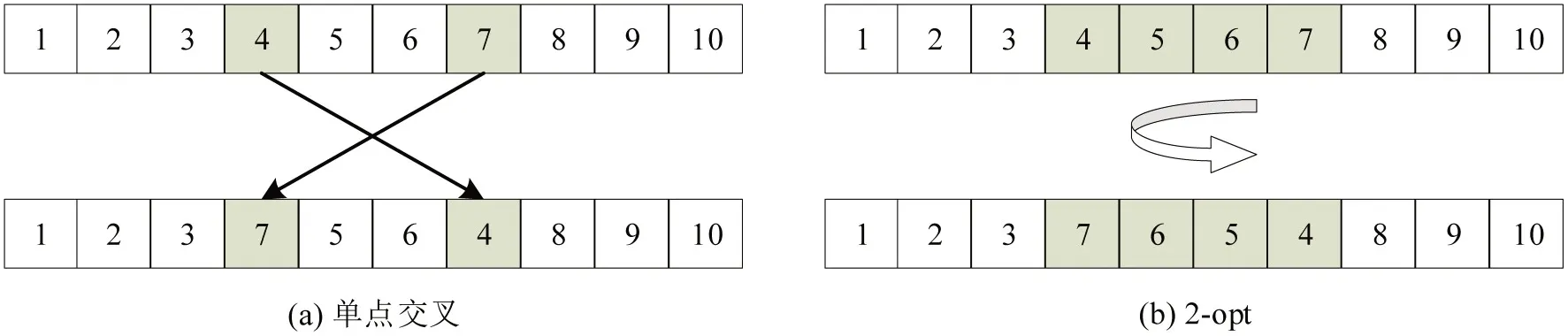
图2 交换规则示意Fig.2 Schematic diagram of exchange rules
(4)Metropolis准则
对于目标函数Z,假设当前解a1的路径长度为Z(a1),新解a2的路径长度为Z(a2),路径差Z′的计算式为

Metropolis准则为

如果Z′<0,则以概率1 接受新的路径;否则,以概率exp(-Z′T)接受新的路径。
(5)单次路径末端优化
以总配送路径距离最小为目标函数,考虑到车辆不用在原地等待无人机返回,可以对部分联合配送路径进行末端优化。
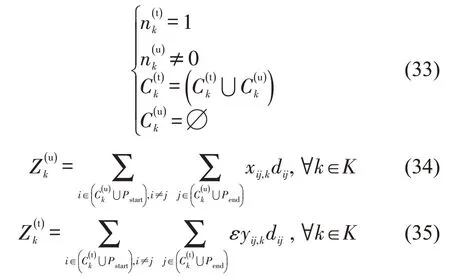
为减少不必要的回路,结合式(33),当无人机负责配送1个及以上节点,而车辆仅配送1个节点(此节点为无人机回收节点,可包括配送中心),其2 种路径方案如图3所示。为使路径距离最小,无人机单次路径距离计算如式(34)所示,车辆单次路径距离计算如式(35)所示。当(Zk(u)+Zk(t))≤εZk(u)时,采用如图3(a)所示方案;当(Zk(u)+Zk(t))>εZk(u)时,采用如图3(b)所示方案。
图3 末端配送路径方案Fig.3 Terminal distribution route scheme
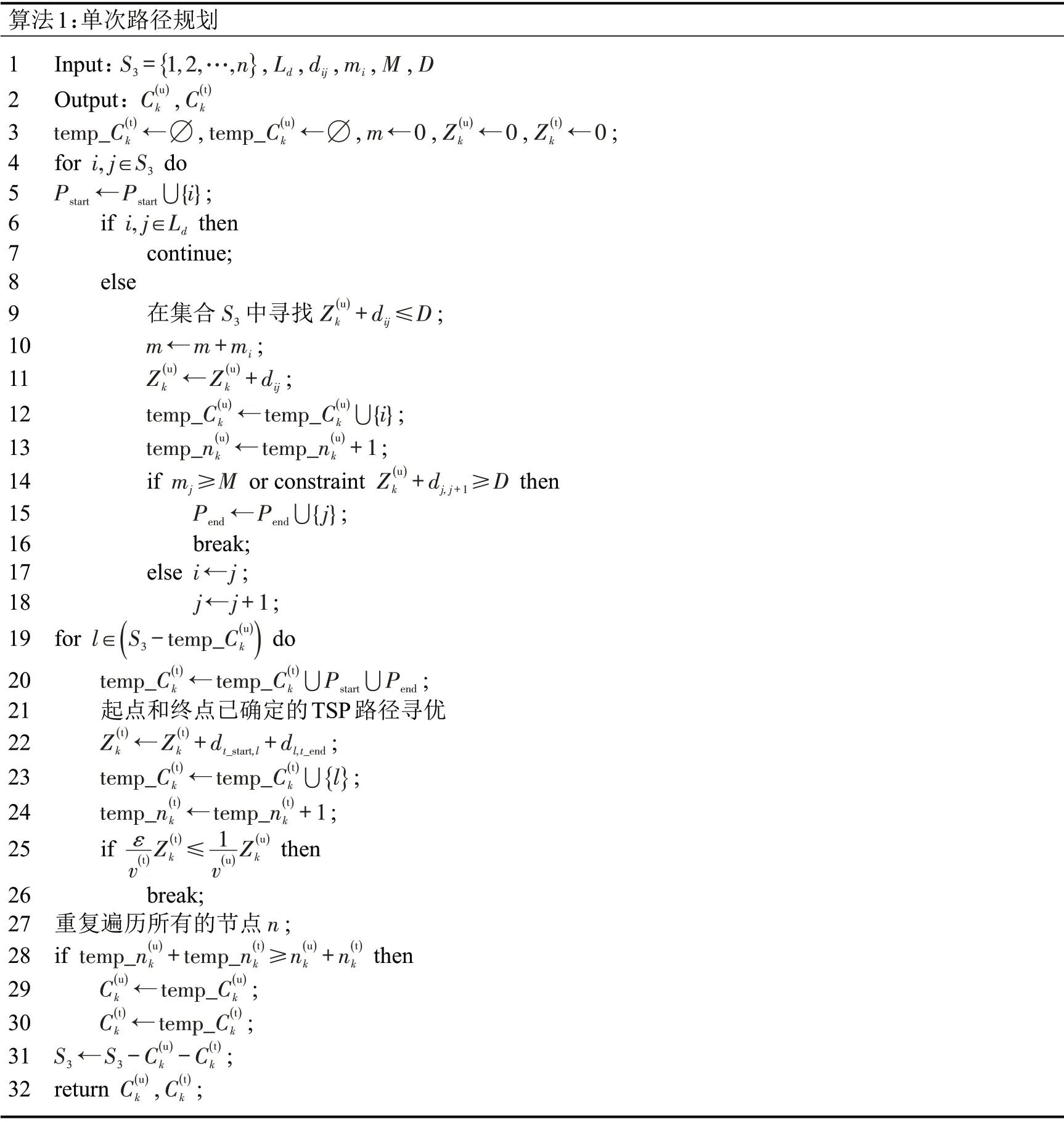
算法1:单次路径规划1 Input:S3={1,2,…,n} ,Ld,dij,mi,M,D 2 Output:C(k u),C(k t)3 temp_C(k t )←∅,temp_C(k u )←∅,m ←0,Zk( u )←0,Zk( t)←0;4 for i,j ∈S3 do 5Pstart ←Pstart ⋃{i};6if i,j ∈Ld then 7 continue;89 else在集合S3 中寻找Zk( u )+dij ≤D;10m ←m+mi;11Zk( u )←Zk( u )+dij;12temp_C(k u )←temp_C(k u )⋃{i};13temp_n(k u)←temp_n(k u)+1;14if mj ≥M or constraint Zk( u )+dj,j+1 ≥D then 15Pend ←Pend ⋃{j};16break;17else i ←j;18j ←j+1;19 for l ∈(S3-temp_C(k u))do 20temp_C(k t )←temp_C(k t )⋃Pstart ⋃Pend;22 12起Zk( t点)←和Z终k( t)点+d已t_st确art,l定+d的l,t_eTnd S;P路径寻优23temp_C(k t )←temp_C(k t )⋃{l} ;22 45 tief mvpε(t_ )Zn(kk( t t))←≤v t1e(u m )Zpk(_ u)nt(k th)+e n 1;26break;22 78重if复tem遍p历_n所(k u)+有te的m节p_点n(k t)n≥;n(k u)+n(k t)then 29C(k u)←temp_C(k u);30C(k t )←temp_C(k t );31 S3 ←S3-C(k u)-C(k t);32 return C(k u ),C(k t );
伪代码如算法2所示。
(6)降温
利用降温速率q按照

进行降温,若当前温度T小于结束温度,则停止迭代,并输出当前最优解的结果;否则,继续迭代。
2.2 场景设计
为验证所提出路径优化模型的有效性,设计了车辆单独配送、无人机-车辆独立配送和无人机-车辆联合配送3种场景,并结合模拟退火算法(SA)和末端优化对设计的场景进行求解。
(1)场景1 车辆单独配送
即传统配送问题(SA+TSP),车辆无载重和续航能力限制,考虑道路阻抗的影响,车辆从配送中心出发,完成所有顾客需求点的配送后,再返回配送中心。
为使模型能求解此问题,设置无人机最大载重量M=0,或无人机最大飞行距离D=0,限制无人机的配送,本文所设计的联合配送模型即转变为车辆单独配送模型。
(2)场景2 无人机-车辆独立配送
即带容量限制的多车型路径问题(SA+CVRP+MTVRP),独立配送为非联合配送,属于PDSTSP的变种问题,车辆和无人机负责各自的顾客点,没有协作,无人机单次配送需返回配送中心进行取货和更换电源。
为使模型能求解此问题,将无人机的发射和接收点设置为Pstart=Pend=n+1,无人机收发操作固定在配送中心进行,除式(14)、式(23)和式(24),车辆不必等待无人机,无人机出入配送中心不受次数限制,结合其余公式,本文所设计的联合配送模型即转变为无人机-车辆独立配送模型。
(3)场景3 无人机-车辆联合配送
即本文所提的路径优化问题(SA+VRP-D),无人机和车辆需要密切合作,共同完成所有顾客点的配送任务。
3 算例分析
为求解本文设计的路径优化模型,使用MATLAB R2019a 编程,在一台处理器为Intel(R)Core(TM)i7-8550U、8 G内存,操作系统为Win10 64位的计算机上运行。模型各参数设置如表1所示。

表1 模型参数Table 1 Model parameters
3.1 案例仿真
考虑到农村地区的位置特点,依据Solomon实例数据集中RC208 的数据,在50 km×50 km 的空间范围内,随机生成包含35个节点的仿真案例,修改部分顾客需求点的货物需求量,加入2个超重点和2个超远点,各节点的具体数据如表2所示。

表2 节点数据Table 2 Node data
以路径距离最小为目标,输入数据参数,求解上述3个场景,统计运算结果。不同场景下的配送结果如图4所示。
车辆单独配送的结果如图4(a)所示,车辆从配送中心出发,顺次完成所有顾客需求点的配送后返回配送中心;无人机-车辆独立配送的结果如图4(b)所示,无人机单次能服务多个顾客需求,但受无人机最大飞行距离限制,而农村节点较为分散,且离配送中心相距很远,无人机仅服务了4个顾客需求点,其余节点由车辆负责配送;无人机-车辆联合配送的配送结果如图4(c)所示,车辆和无人机分别从配送中心出发,无人机同样服务多个顾客需求点,超重点和超远点仅能由车辆进行配送,但超重点可以作为车辆配送的中间节点,也能作为无人机飞行的收、发节点,无人机和车辆相互协作,服务所有顾客需求点后共同回到配送中心。

图4 不同场景下的配送结果Fig.4 Delivery results in different scenarios
对每个场景独立运行程序30 次,每次的运行结果如图5所示。不同场景下的统计结果,以及场景3相对其他场景的变动比例如表3所示。
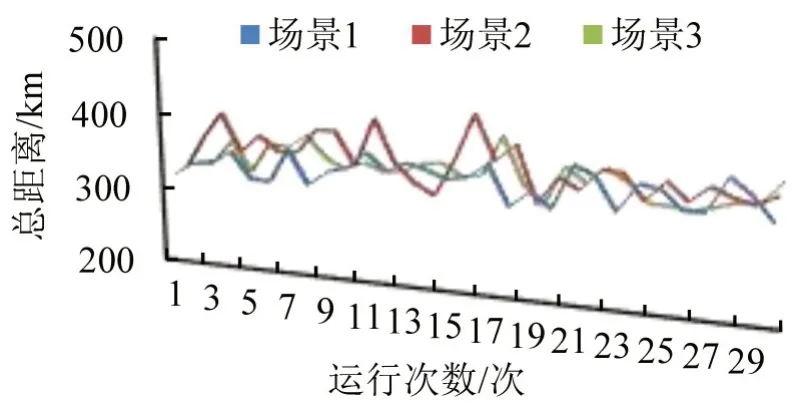
图5 不同场景的运行结果Fig.5 Diagram of running results of different scenarios
表3中,场景3 的最小值在所有场景中结果最小,相对场景1下降2.81%,相对场景2下降1.91%,场景2的最小值结果也小于场景1。说明无人机和车辆的独立配送和联合配送均优于车辆单独配送,无人机的加入,可以减少总的配送距离,证明了本文设计模型的可行性,3 种场景均可以视为设计模型在不同参数下的特例。此外,场景2、场景3的最大值均大于场景1,场景1的仿真结果差距最小。

表3 不同场景下的结果及变动比例Table 3 Results and change ratios in different scenarios
由图5中可知,场景1中30次的运行结果波动幅度最平缓,另外2 种场景的波动幅度较大,特别是场景2,由于无人机的发射和接收点均限制为配送中心,且受最大载重量和最大飞行距离限制,无人机能服务的顾客点十分有限,部分单一节点分配给无人机进行配送后,导致总配送距离增大。在3种场景中,场景3 的结果均值依然最小,无人机和车辆的联合配送有着更大优势,合理分配无人机和车辆的配送路径,两者相互协调,可以更高效地完成所有节点的配送任务。
3.2 灵敏度分析
为验证在不同载重和飞行距离限制下,无人机是否能很好地完成农村地区的物流配送任务,使用表2的顾客点数据,对无人机最大载重和最大飞行距离进行灵敏度分析,其余参数保持不变,每组结果独立运行20次后取最小值。保持无人机最大载重不变,不同飞行距离限制下,3种场景的配送结果如图6所示。

图6 不同最大飞行距离下配送结果Fig.6 Delivery results under different maximum flight distances
图6中,场景1因为仅使用车辆进行配送,而车辆无配送距离限制,无人机最大飞行距离的变化,不会影响其配送结果。以场景1为参考,随着无人机最大飞行距离的提高,无人机的运载能力得到充分发挥,场景2的配送距离逐渐低于场景1,在飞行距离取20 km 时达到最低,明显优于其他场景,但继续增大无人机的最大飞行距离,场景2的配送距离反而增大,因为,此时无人机的飞行直径已经接近空间范围的1/2,无人机存在远距离往返,在每次完成配送后,需要折返回配送中心,导致配送距离增加。而场景3因为有车辆的支持,在较低飞行距离时,已经能很好地发挥无人机的运载能力,其配送结果优于另外2个场景,但随着无人机飞行距离的增加,场景3 的配送距离同样在增大,这是受数据节点位置分散的影响,无人机在完成附近顾客点的配送时,还会飞往较远顾客点,车辆也因此增大了行驶距离。
保持无人机的最大飞行距离不变,不同载重量限制下,3种场景的配送结果如图7所示。
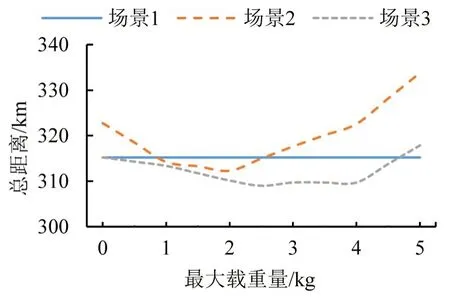
图7 不同最大载重量下配送结果Fig.7 Delivery results under different maximum load capacities
仍然以场景1 为参照,由图7可知,场景2 中,无人机在较小载重量时,已优于场景1,但因无人机最大飞行距离固定,无人机只能在配送中心一定范围内飞行,其最大载重量两端(0 kg 和5 kg)均无法很好地利用无人机的配送能力,结果陷入局部最优。而场景3 中,车辆可以携带无人机,无人机因此能够前往更远的节点,当周围顾客需求点分布较为密集,无人机载重量越大,越能发挥其配送优势,减少总的配送距离。值得注意的是,当无人机最大载重量超过4 kg 时,节点中已经不存在超重点,在可达的情况下,无人机能配送所有节点,但无法同时配送超重点和其他节点,无人机的配送能力受到限制。
为进一步了解无人机的特性,取无人机最大载重1~3 kg、最大飞行距离9~21 km,构成25 组配送能力组合,运算结果如表4所示。
表4中,随着无人机配送能力的上升,无人机配送的节点数不断增多,有利于发挥无人机无视路况、速度快的优势。而仅提升一项能力,虽然可以增加无人机配送节点,但因需要同时提高满载率和续航利用率,总配送距离会有所上升。从配送距离在310 km以下的几组(编号为:7、12、18、24)可以发现,无人机的最大载重量和飞行距离以一定比例同步提升,能更好地发挥无人机的配送能力,在配送距离上更优。
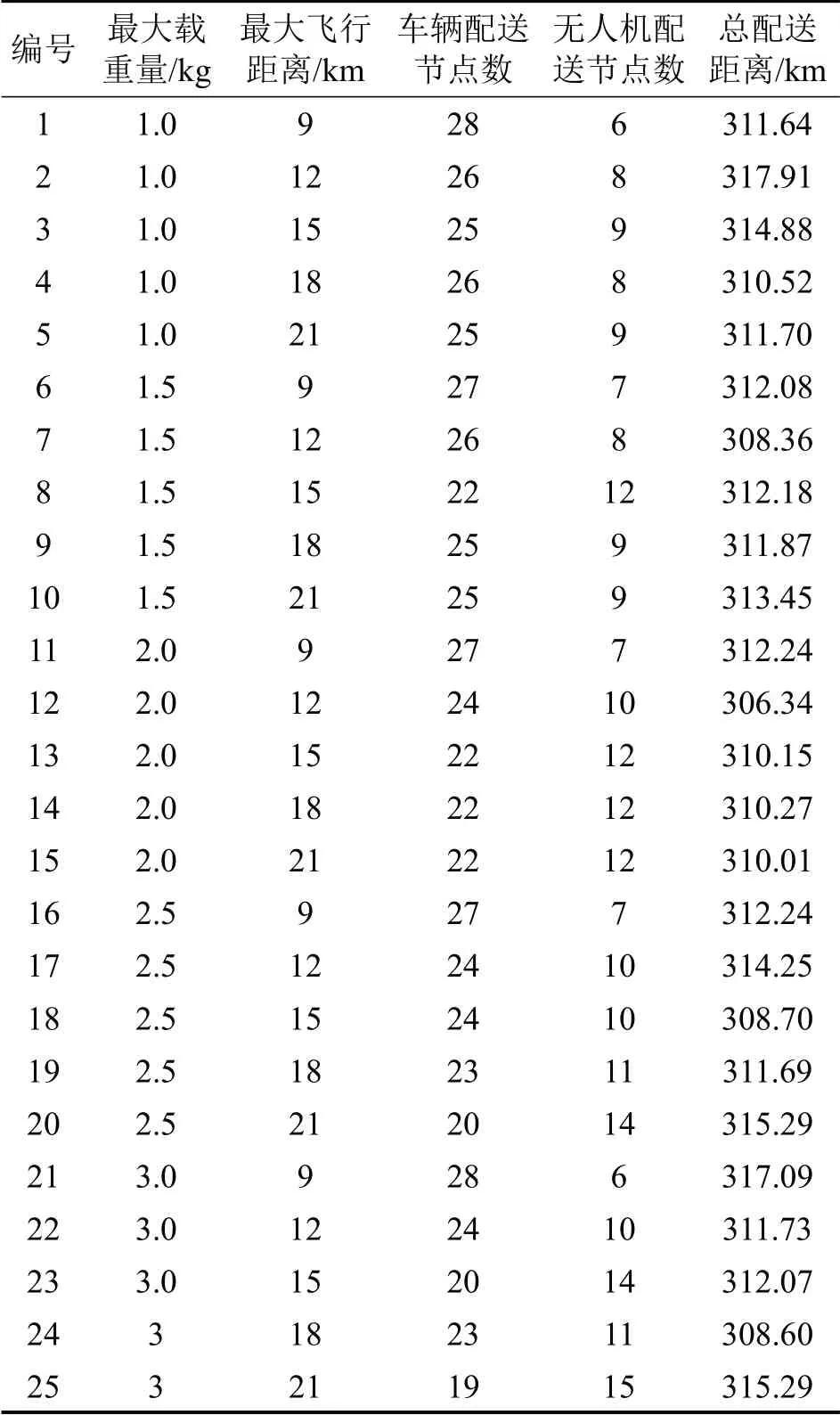
表4 无人机不同能力组合下场景3配送结果Table 4 Scenario 3 delivery results under different combinations of drone capabilities
3.3 实例求解
以湖南省浏阳市为例,随机选取下属5个乡镇范围内的30个节点,使用百度地图标记各点,无人机飞行距离取两点间欧式距离,车辆行驶距离取推荐的最短车行距离。道路阻抗系数取1,假设道路情况良好,车辆可以送达所有包裹,无人机最大载重量为2 kg,最大飞行距离10 km,平均飞行速度80 km·h-1,车辆平均行驶速度50 km·h-1。节点位置及配送结果如图8所示。
联合配送相比于传统配送,在配送距离上最大优势在于可以无视地形直线飞行,而部分农村节点靠近河流、山区,离公路距离较远,车辆进出十分不便,例如,节点13和节点16,因为河流阻挡,车辆行驶需要绕行,其推荐路程(6.6 km)是直线路程(1.5 km)的4.4倍。
采用设计算法对3种场景进行求解,求解结果分别为:106.69,106.99,106.09 km,其中,场景3 距离最短。3 种场景的配送距离差距并不大,主要是因为节点较为分散,无人机配送受到严格的限制,图8中无人机仅服务了5 个节点,大部分节点依然由车辆完成配送。在不考虑道路阻抗的情况下,无人机的距离优势并不明显,但无人机所分担的距离,可以减小车辆行驶距离,降低燃油消耗。此外,相比于单纯增加无人机配送节点,设计的联合配送可以提高无人机的能量利用率,使运输更节能环保。

图8 节点位置及配送结果Fig.8 Node location and delivery result
4 结论
本文提出一种新的无人机-车辆联合配送模式,以总配送距离最小为目标,采用3 步骤路径分配方法,优先分配无人机的路径。无人机单次可以服务多个顾客需求点,且车辆不用在固定点等待无人机,两者联合协作,共同完成配送任务。此外,设计了3 种配送场景,通过修改部分参数,本文模型能同时适用于3种场景。由于问题求解的复杂性,使用了模拟退火算法,并结合单次路径末端优化求解模型。
考虑到一些特殊地区需求点较为分散的特点,采用包括特殊点在内的案例数据进行分析,结果证实了模型的可行性。并对无人机的最大载重量和飞行距离进行了敏感性分析,结果表明:单独提升其中一项能力,超过一定范围后,并不能减少总的配送距离,需要两者协调,才能充分发挥无人机的配送能力。
猜你喜欢
中国石油石化(2021年9期)2021-07-17
中小企业管理与科技·中旬刊(2020年3期)2020-06-22
锦绣·下旬刊(2019年9期)2019-09-10
小学生导刊(2018年34期)2018-12-18
浙江大学学报(工学版)(2016年9期)2016-06-05
教学与管理(中学版)(2016年1期)2016-04-08
山东青年(2016年3期)2016-02-28
山东青年(2016年1期)2016-02-28
中国洗涤用品工业(2015年6期)2015-02-28
母子健康(2015年1期)2015-02-28