
一种新型高位上料自装卸式垃圾车的控制方法
2021-12-24 02:45吴杰灵夏凯
专用汽车 2021年12期
吴杰灵 夏凯
中图分类号:U469.6+91 文献标识码:A 文章编号:1004-0226(2021)12-0067-04
1前言
目前市场上常见的自装卸式垃圾车一般都是侧挂桶带箱体举升后门卸料。最近几年随着环卫市场的发展,在垃圾分类、无滴漏等要求下,为了克服传统侧装式自装卸式垃圾车容易撒漏、作业噪声易扰民等问题,一种高位举升自装卸式垃圾车越来越受到用户的认可。该垃圾车收集垃圾后可以直接倾倒在处理池内,也可以和大中型压缩式垃圾车、固定式、移动式垃圾压缩站等配合使用,直接对接到大中型垃圾车和垃圾站的料斗内收集,再经长途运转到中转站或填埋场,从而大大提高垃圾收集转运的效率,且过程不产生二次污染。
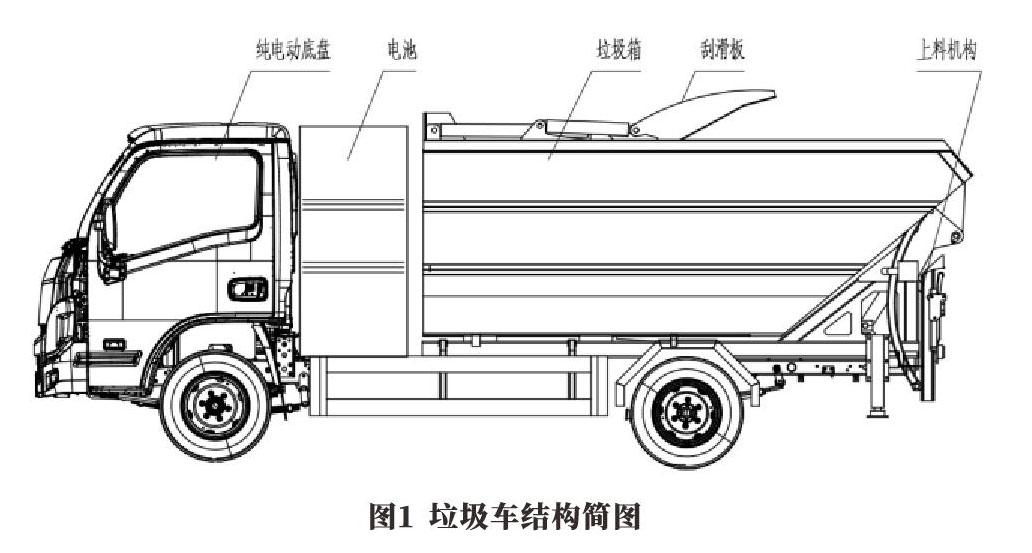
2整车构成
高位上料自装卸式垃圾车主要由底盘、垃圾箱、刮滑板机构、上料机构等组成,如图1所示。底盘为纯电动底盘,作业噪声小;垃圾箱为船型箱式结构,规避了传统老式箱体+后面的密封结构,从根本上解决转运过程中的二次污染问题;上料机构保证垃圾桶先水平上升最高位置后再倾倒垃圾,实现上料不撒漏。
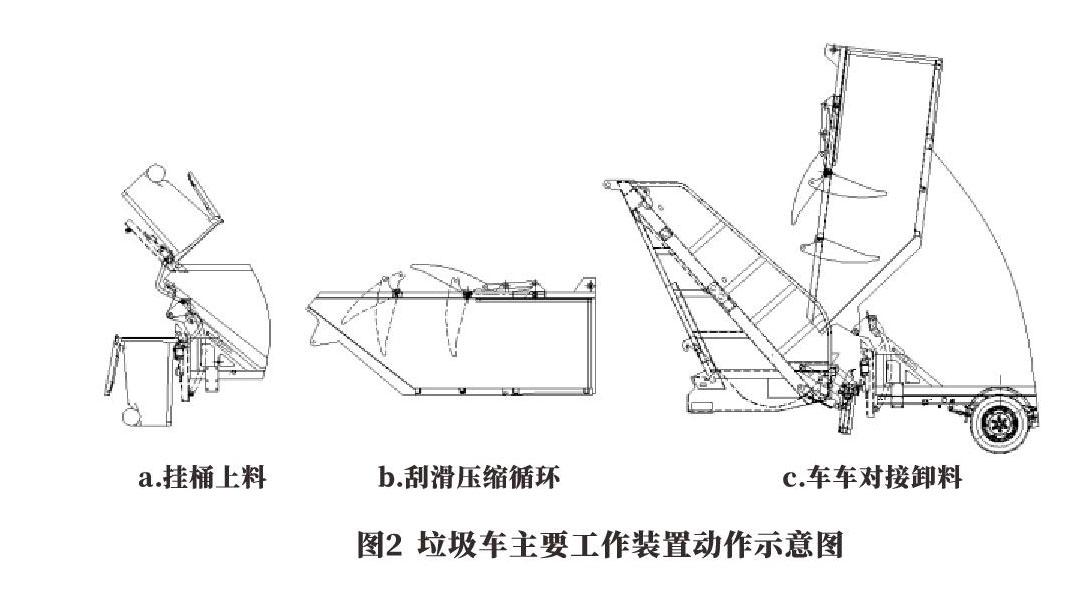
3工作流程
首先垃圾桶挂上后被上料机构水平提升至箱体尾部料口位置,然后翻转将桶内垃圾倒入垃圾箱内;其次垃圾倒入垃圾箱后会在上料口处堆集,通过刮滑板机构运动将其强力刮至垃圾箱前部并不断压缩。提高整车的装载量:当垃圾箱装满后,刮滑板机构运动至车尾处,盖住上料口,防止垃圾飞溅产生二次污染;垃圾箱卸料时,先打开支腿油缸,保持作业的安全稳定,再从垃圾箱尾部高位为轴开始翻转倾倒卸料,可车车对接卸料,也可直接倒入处理池卸料。整个收集/运输讨程无滴漏,垃圾车主要工作装置动作如图2所示。
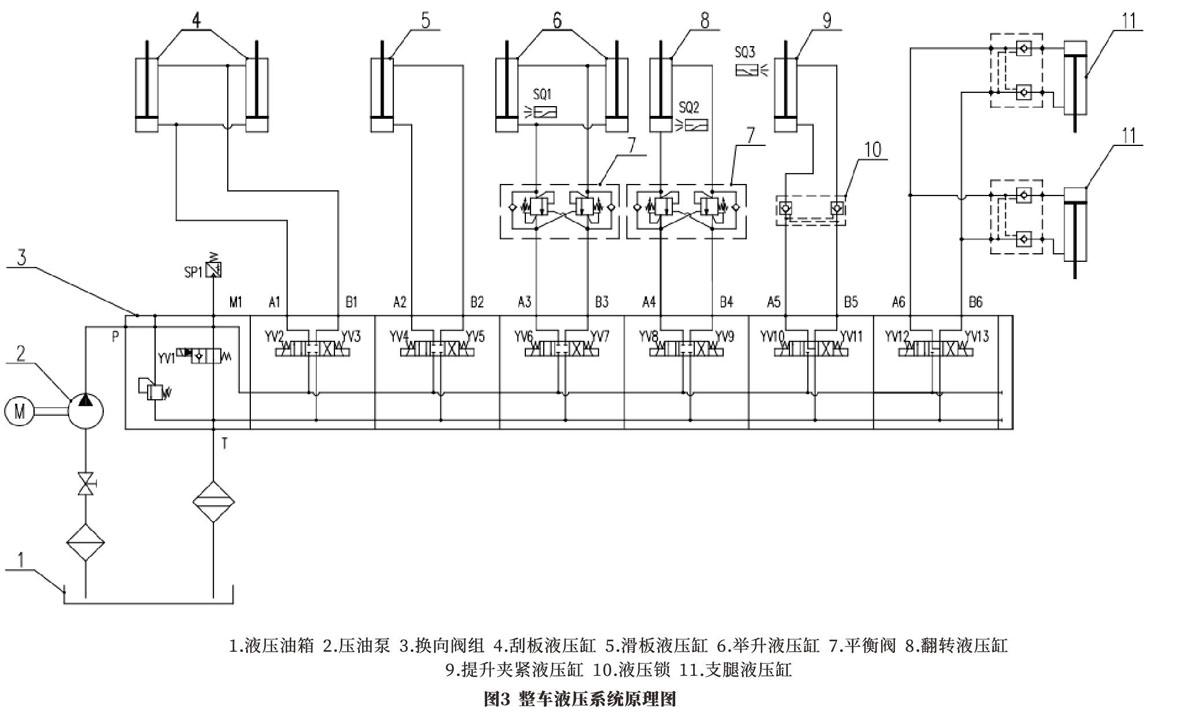
4液压原理图
整车液压系统原理图如图3所示:刮滑动作回路由两个并联的刮板油缸(4)和一个滑板油缸(5)驱动;举升动作回路由两个并联的举升油缸(6)驱动,因箱体负载大,在回路中配置了双平衡阀(7),箱体下降到位后有接近开关SQI在位感应;翻转动作回路由一个翻转油缸(8)驱动,为保证翻转动作的稳定,在回路中也配置了双平衡阀(7),翻转下降到位后有接近開关SQ2在位感应;提升夹紧回路配置了双向液压锁(10),夹紧到位后有接近开关SQ3在位感应;支腿回路配置了双向液压锁(10),两个支腿液压油缸并联;换向阀组(3)的P口配置了1个压力传感器SP1测试系统动作压力。
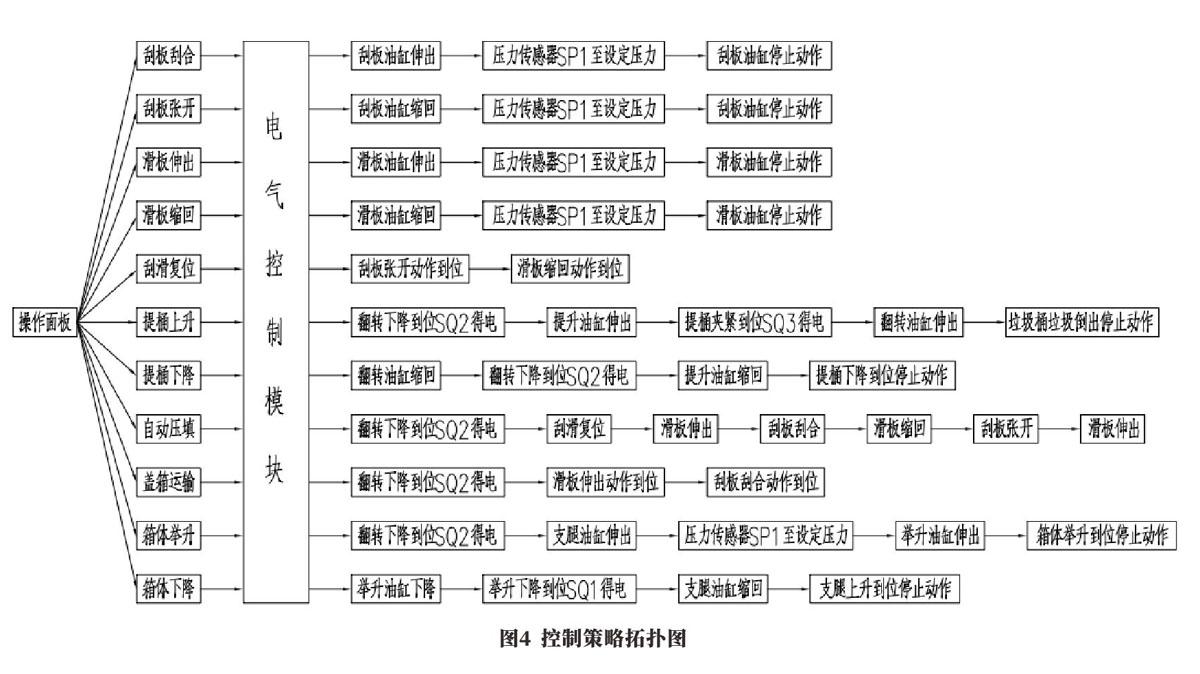
5控制策略
本垃圾车技术控制策略的拓扑图如图4所示:操控人员可通过操作面板进行刮板刮合、刮板张开、滑板伸出、滑板缩回、刮滑复位、提桶上升、提桶下降、自动压填、盖箱运输、箱体举升和箱体下降等动作。
刮板刮合、刮板张开、滑板伸出和滑板缩回这几个动作可手动操作启动,手动停止动作,或者各动作到位后,压力达到压力传感器SP1的设定压力时自动停止。刮板刮合和滑板缩回动作与垃圾压缩相关,负载较大,设定压力较高;刮板张开和滑板伸出动作负载较小,设定压力较低。
以下为整个垃圾上料、运输和卸料过程:
a.刮滑复位动作:操作动作按扭,电磁铁YV1、YV3得电,刮板油缸缩回,刮板张开到位后,压力达到SP1的设定压力,电磁铁YV3失电、YV5得电,滑板缩回到位后,压力达到SP1的设定压力,电磁铁YV1、YV5失电,停止动作;在进行提桶上升(上料)和箱体举升(卸料)动作,自动压填以及盖箱运输动作时,必须先进行刮滑复位动作,方便垃圾车上料、卸料与垃圾压缩。
b.提桶上升动作:即进行上料操作。先将垃圾桶挂上上料机构,操作动作按扭,控制系统先判断翻转下降到位接近开关SQ2是否得电以及刮滑是否复位,如果为否,系统自动执行翻转下降及刮滑复位动作;达到执行条件后,电磁铁YVl、YV10得电,提升油缸伸出,提桶夹紧到位接近开关SQ3得电,电磁铁YV10失电、YV8得电,翻转油缸伸出,垃圾桶垃圾倒出,电磁铁YV1、YV8失电,停止动作。
c.提桶下降动作:即空桶下降操作。电磁铁YV1、YV9得电,翻转油缸缩回,翻转下降到位接近开关SQ2得电,电磁铁YV9失电、YV11得电,提升油缸缩回,提桶机构下降到位,电磁铁YV1、YV11失电,停止动作。
以上为一次上料动作,当完成4~5次上料动作后,执行一次以下动作:
d.自动压填动作:即垃圾压缩动作。操作动作按扭,控制系统先判断翻转下降到位接近开关SQ2是否得电以及刮滑是否复位,如果为否,系统自动执行翻转下降及刮滑复位动作;达到执行条件后,电磁铁YV1、YV4得电,滑板油缸伸出,滑板伸出到位后,压力达到SP1的设定压力,电磁铁YV4失电、YV2得电;刮板油缸伸出,刮板刮合到位后,压力达到SP1的设定压力,电磁铁YV2失电、YV5得电;滑板油缸缩回,滑板缩回到位后,压力达到SP1的设定压力,电磁铁YV5失电、YV3得电;刮板油缸缩回,刮板张开到位后,压力达到SP1的设定压力,电磁铁YV1、YV3失电,停止动作。
当收集完一个垃圾点或垃圾箱收满(N次上料动作)后,执行以下动作:
e,盖箱运输动作:操作动作按扭,控制系统先判断翻转下降到位接近开关SO2是否得电以及刮滑是否复位,如果为否。系统自动执行翻转下降及刮滑复位动作;电磁铁YV1、YV4得电,滑板油缸伸出,压力达到SP1的设定压力,电磁铁YV4失电、YV2得电;刮板油缸伸出,刮板刮合到位后,压力达到SP1的设定压力,电磁铁YV1、YV2失电,停止动作。
如已满箱,垃圾车行驶至卸料点后,可执行以下动作:
f,箱体举升动作:即进行卸料操作。操作动作按扭,控制系统先判断翻转下降到位接近开关SQ2是否得电以及刮滑是否复位,如果为否,系统自动执行翻转下降及刮滑复位动作(可先执行此动作);达到执行条件后,电磁铁YV1、YV12得电,支腿油缸伸出,压力达到SP1的设定压力,电磁铁YV12失电、YV6得电;举升油缸伸出,箱体举升到位,电磁铁YV1、YV6失电,垃圾倒出卸料。
g.箱体下降:操作动作按扭,电磁铁YV1、YV7得电,举升油缸下降,举升下降到位接近开关SQ1得电,电磁铁YV7失电、YV13得电,电磁铁YV7失电、YV13得电;支腿油缸缩回,电磁铁YV1、YV13失电,卸料完成。完成卸料后执行盖箱运输动作,继续收集垃圾。
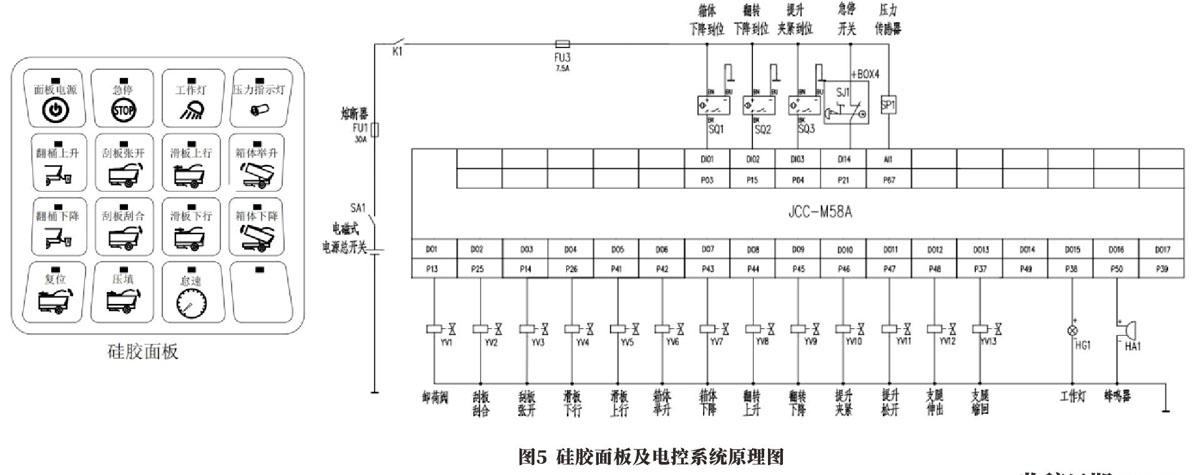
6控制系统及电控系统原理
控制系统采用手动+硅胶面板,操作简单,稳定可靠。硅胶面板位于车辆右侧(靠后),车辆正常作业时,操控人员位于车辆右侧,极大提高了操作人员的安全性;该车可选配无线遥控,提高了作业的安全性和便捷性。在检修作业或者电控系统失效的情况下,还可以通过手动操作位于车辆左侧的多路阀的手柄,对车辆进行应急操作。硅胶面板及电控系统原理图如图5所示。
7结语
通过以上的动作及控制策略分析:系统操作简单,上料和卸料动作为顺序动作;自动化程度高,刮滑动作和盖箱动作可手动也可自动操作;控制逻辑强、安全性好,翻转下降到位和刮滑复位后才可进行上料、卸料、自动压填以及盖箱运输动作。
猜你喜欢
中国应急管理科学(2022年1期)2022-04-18
科学与财富(2021年35期)2021-05-10
E动时尚·科学工程技术(2019年11期)2019-09-10
环球时报(2018-01-25)2018-01-25
科技创新与品牌(2017年9期)2017-10-20
集装箱化(2016年8期)2016-10-20
中国机械(2014年24期)2014-10-21
小小说大世界(2014年9期)2014-09-15
中国水运(2014年3期)2014-04-14
作文世界(小学版)(2008年1期)2008-03-17
