
仿生偏振探测技术及导航传感器应用
2021-12-17 15:32褚金奎张钟元张然于灏尉达
计测技术 2021年5期
褚金奎,张钟元,张然,于灏,尉达
(大连理工大学 机械工程学院,辽宁 大连116024)
0 引言
偏振态作为光的“第四维”信息,具有“弱光强化,强光弱化”的鲜明特点。基于偏振视觉的探测技术,能够适应复杂光照环境下的目标测量需求,可有效提升探测距离与空间分辨力,成为遥感学、目标识别、机器视觉测量等领域的研究热点。
生物学家通过大量的仿生学研究发现,在自然界中,多种生物拥有感知环境偏振光的奇妙能力,并能够利用偏振光,辅助个体完成觅食、迁徙及环境感知等行为[3]。其中,部分昆虫在漫长的生物进化中形成了结构精妙的复眼器官,能够通过偏振视觉感知天空环境下的偏振光场分布,并利用其实现自主导航定位的功能。受到昆虫利用偏振视觉进行自主导航能力的启发,国内外众多学者从仿生偏振探测机理出发,不断围绕昆虫的偏振敏感特性与感知机制开展相关研究,并针对其利用偏振信息进行导航的独特能力,展开了对仿生偏振光导航机理与方法的全面研究,模仿昆虫复眼结构设计开发了多种类型的偏振光导航传感器,并逐步探索偏振光导航技术的应用方法。
本文结合该领域的研究热点,首先从仿生学研究成果出发,对多种生物的偏振视觉探测机理进行阐述,之后针对自主导航这一关键应用方向,分别从天空偏振模式分布研究与偏振光导航传感器设计应用两方面,介绍了国内外偏振光导航技术的研究现状与发展方向。
1 基于仿生学的偏振光探测机理
生物学家经过长期研究发现,在漫长的生物进化过程中,多种昆虫[1]、迁徙鸟类[2]、海洋生物[3,7]、部分两栖类[4]、爬行类动物[5],都进化出了能够探测环境偏振光的独特能力,并能够利用偏振光矢量信息,辅助个体完成觅食、迁徙及环境感知等行为。1949年,德国学者Von Frisch K首次发现蜜蜂能够感知天空偏振光,并根据其方向进行导航的行为特性[6];1950年,Vowles D M等人又发现了部分蚂蚁对环境偏振光极化方向的敏感性[7];之后,关于沙蚁[1]、帝王蝶[9]、蟋蟀[8,10]、蝗虫[11]、夜行蜣螂等昆虫[12],候鸟[2]、蝙蝠[13]等飞行生物,翻车鱼[3]、螳螂虾[14]等海洋生物的偏振光敏感特性,也通过大量的生物行为学、形态学研究被陆续发现。
进一步的解剖学研究显示,大多数拥有偏振视觉,或对偏振光敏感的生物,其进行偏振探测的“手段”都依赖于复眼中的部分独特结构——背部边沿区域(简称DRA)内按照一定规则有序排列的小眼,其对偏振光高度敏感。研究人员发现,DRA区域小眼感杆结构内的微绒毛,与一般视神经区域的杂散分布不同,其空间排列具有沿轴向一致,径向相互垂直的特点[8,15];微绒毛的排布方式对于不同类型、不同极化方向的偏振光具有一定的选择性,该特性决定了生物对于环境偏振光具有选择敏感性。如图1~3展示了部分生物的DRA小眼结构。沙蚁[8]、蝗虫[15]等昆虫的小眼微绒毛多为平面结构,且在不同区域有不同的排列方向,故其对于特定方向的线偏振光敏感;而螳螂虾的小眼微绒毛为多层叠状结构,除线偏振光外,其还对部分圆偏振光敏感[14]。

图1 多种昆虫的复眼形貌图Fig.1 Compound eye morphology of various insects
1988年,Labhart等人解释了蟋蟀偏振视觉的神经作用机理,通过DRA小眼微绒毛的偏振光矢量正交敏感结构,与中枢神经层视神经叶的偏振对立(简称为POL)神经元协同作用,昆虫构成了独特的偏振视觉系统,且对环境光强不敏感[8]。进一步研究发现,蟋蟀具有三种响应方向不同的POL神经元,其能够通过对多类神经元信号进行处理,获得自身体轴与太阳子午线的夹角信息,辅助个体完成飞行导航[10],如图4所示。
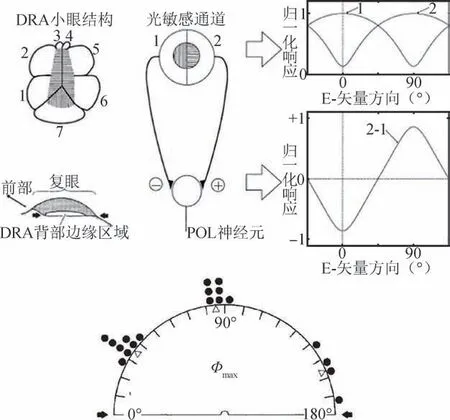
图4 蟋蟀的POL神经元与极化作用响应示意图Fig.4 Schematic diagram of POL neurons and polarization response of crickets
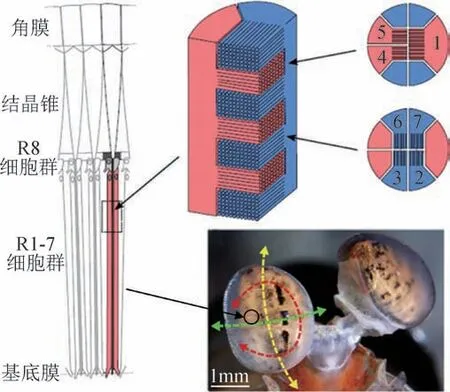
图3 螳螂虾的DRA小眼结构图Fig.3 DRA ommatidium structure of mantis shrimps
之后,研究人员又发现了多种昆虫能够利用偏振视觉,辅助个体与种群,完成复杂天气环境、不同光照条件下的导航任务。生物利用天空偏振光导航的奇特能力,引起了相关研究领域的关注,研究者逐步尝试从仿生偏振视觉的导航机理出发,探寻实现目标自主导航的新手段。
2 面向导航的天空偏振分布模式研究
2.1 理想大气偏振分布模型
16世纪初,Arago首先发现了天空光场的偏振现象。1871年,学者Rayleigh通过对多种大气粒子散射特性的研究,提出了瑞利散射模型,对这一现象进行了解释[16]。当太阳光穿过大气层时,大气中的浮游粒子引起入射光的散射和吸收,当其直径远小于入射光的波长时(在大气中,主要针对N2,CO2,O2,O3等微粒),会发生瑞利散射现象。如图5所示,在晴朗无云的天空下,局部大气环境可以采用瑞利散射理论,构建大气偏振光场的分布模型。假设太阳光散射次数为单次,且散射光为线偏振光,通过在地理坐标系下观测位置、太阳位置与观测者的空间几何关系,建立了基于瑞利散射的大气偏振分布模型,计算获得全天空的偏振参数分布图。
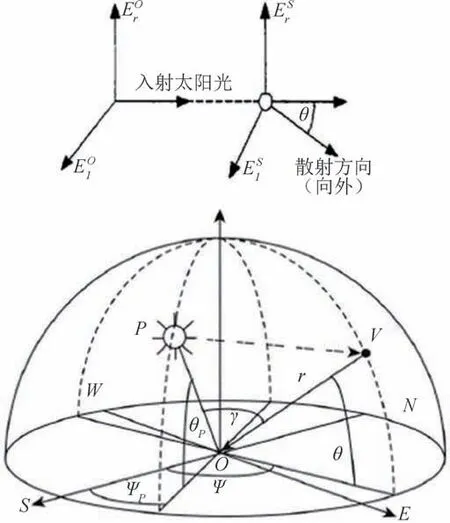
图5 瑞利散射模型及大气偏振模式分布图Fig.5 Rayleigh scattering model and atmospheric polarization pattern
2007年,大连理工大学赵开春等人[17]基于瑞利散射理论,运用可视化C++软件,开发了大气偏振模式测量仿真系统,实现了对全天空偏振光分布模式的仿真,并能够通过参数设置,预测指定时间点和地理位置的天空偏振信息,如图6所示;2010年,合肥工业大学张旭东等人[18]运用麦克斯韦方程研究光波的前向散射过程,并从电矢量的角度出发,分析太阳光在理想大气中的单次瑞利散射过程,建立了基于矢量法的天空偏振光分布模型。
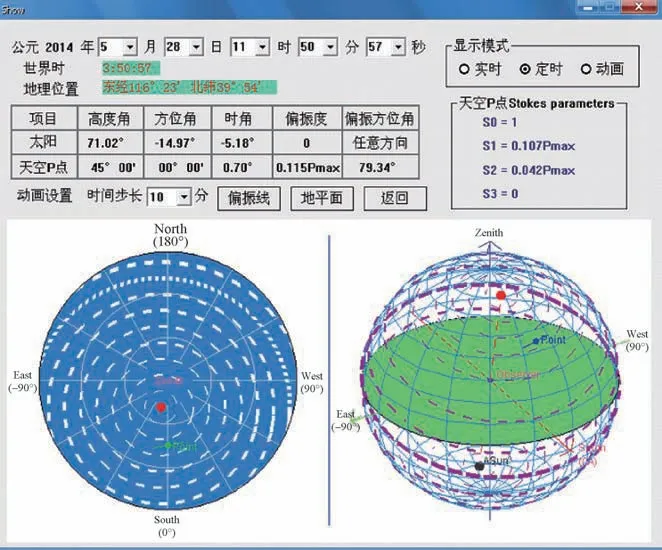
图6 大连理工大学开发的可视化大气偏振信息测量系统界面Fig.6 Interface of visual atmospheric polarization information measurement system developed by Dalian University of Technology
在多云、雨雪等复杂天气环境下,大气中存在许多大尺度的水滴、尘埃等粒子,自然光经常会发生多次散射,简单的瑞利散射模型已经无法有效解释该过程。1908年,学者Mie提出了米氏散射理论[19],当大气中浮游粒子的直径与入射光波长相近时,其散射过程符合米氏散射模型。
2010年,中国科学院上海光学精密机械研究所黄旭锋等人[20]基于米氏散射理论建立了单次光的散射偏振模型,并利用矢量偏振分析装置测量大气散射光的偏振态,分析了不同天气状况对大气偏振模式的影响;2011年,合肥工业大学吴良海等人[21]利用米氏散射模型分析了大气中多种粒子的散射与偏振特性,并通过随机传输理论进行仿真;2013年,大连理工大学覃彬等人[22]运用米氏散射模型和斯托克斯矢量方法,分析多种不同尺寸气溶胶粒子对天空光偏振度的影响,并搭建了天空偏振光测量系统。相关研究结果表明,米氏散射模型更贴近于实际的大气散射,但在解释气溶胶等复杂大气成分的偏振传输特性时,存在一定的局限性。
2011年,Buras等人[23]提出了基于蒙特卡洛法的矢量辐射传输模型,在大气散射传输模型中引入了气溶胶、云团等复杂大气成分的影响,如图7所示。矢量辐射传输模型克服了米氏散射模型的局限性,可用于建立更符合实际情形的大气偏振分布模型。

图7 Buras等人提出的矢量辐射传输模型及仿真测试图Fig.7 Vector radiation transmission model and simulation test proposed by Buras et al
考虑到矢量辐射传输模型的复杂性,采用传统分析方法无法模拟大气散射光传输的过程。2013年,大连理工大学王威等人[24]利用简化的双层大气模型模拟实际大气,并通过“倍加-累加法”求解矢量辐射传输方程,得到全天空离散点处光波的斯托克斯参量,建立了基于矢量辐射传输模型的大气偏振模型,如图8所示。2014年,合肥工业大学王子谦等人[25]基于矢量辐射传输模型提出了一种针对浑浊大气偏振模式的建模方法,并对大气的偏振分布模式与变化特性进行分析和预测。

图8 大连理工大学基于蒙特卡洛法的大气偏振建模流程图Fig.8 Flow chart of atmospheric polarization modeling based on Monte Carlo method developed by Dalian University of Technology
2.2 天空偏振分布规律研究
20世纪末,随着光学探测技术的发展,国外学者针对大气偏振模式测量方法的研究不断深入。1981年,学者Brines运用简易的偏振光探测装置,以间隔5°的太阳高度角和太阳方位角,对全天空偏振光场进行扫描测量[26]。1997年,Voss等人使用改进的广角相机,设计了天空偏振信息测量系统,对视野内的天空光偏振特性进行了实时探测与分析[27]。1999年,Horvath等人对日出时刻的天空光偏振信息进行了探测,通过分析得到了天空光偏振度与太阳位置的关系,进一步验证了晴朗天空下瑞利散射模型的合理性[28]。
近年来,国内相关研究领域也相继开展了针对天空偏振分布规律的研究,包括中国科学院安徽光学精密机械研究所、中国科学院遥感应用研究所、中国科学院上海技术物理研究所、国防科技大学、北京大学、清华大学、大连理工大学、中北大学、西北工业大学等众多单位均基于仿生导航应用,展开了相关研究工作。其中,清华大学赵开春等人[29]搭建了基于CMOS工业相机的分时天空偏振光自动探测装置,并利用该装置对天顶偏振光进行了长时间的持续观测,如图9所示;中国科学院安徽光学精密机械研究所开发了多波段偏振探测型CCD相机,并以Y-12飞机作为飞行平台,开展了多次天空偏振遥感探测试验[30];北京大学晏磊团队[31]运用全天空偏振测量装置,对多波段天空偏振光的分布模式进行了探测,并结合天文导航方法,分析了生物利用天空偏振信息确定航向的机理;大连理工大学褚金奎[24]课题组分别基于瑞利散射模型和矢量辐射传输模型,分析了多种天气条件下全天空多波段偏振光的分布规律,如图10所示,并通过仿真分析结果,对昆虫偏振视觉敏感区多位于蓝紫波段的现象进行了解释,进而为仿生偏振光导航应用提供了理论依据[32-33]。

图9 清华大学搭建的天空偏振光观测实验装置图Fig.9 Experimental device for observation of polarized skylight designed by Tsinghua University
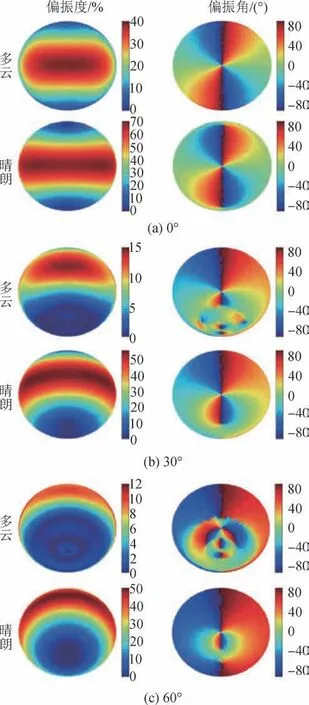
图10 大连理工大学针对水云条件下的天空偏振模式仿真图Fig.10 Simulation results of the skylight polarization model under water cloud conditions proposed by Dalian University of Technology
3 偏振光导航传感器的发展与应用
导航能力是生物感知,预测自身方位信息的关键方法。随着信息时代的发展,导航定位技术在人类活动中,愈发凸显重要意义。目前,广泛应用的导航技术包括地图导航、无线电导航、惯性导航、天文导航等多种手段;而基于多传感器信息融合的组合导航技术与多策略自适应的智能自主导航方法,逐渐成为现代导航技术的发展趋势。
受生物启发的偏振光导航技术,具有完全自主、抗主动干扰、误差不随时间累计的优势[34]。开发偏振光导航传感器,探索仿生偏振光导航方法,为面向复杂环境,远距离、长周期的目标自主导航与组合导航应用,提供了新的研究思路。
3.1 偏振光导航传感器的发展
早期偏振光导航传感器的研究工作,主要从模仿昆虫的单一复眼结构出发,探索其导航原理的可行性。1997年,Labhart等人[35]模仿蟋蟀的DRA小眼结构与POL神经元机理,首先开发出了多通道仿生偏振光探测装置,并将其搭载在移动机器人上开展模拟导航实验,如图11所示;2008年,大连理工大学褚金奎课题组赵开春等人[36]从沙蚁的偏振导航机理出发,研制了基于ARM微处理器的三通道偏振光导航传感器,如图12所示;该传感器的光学探测通道由线性检偏片,蓝色滤光片和硅光电二极管构成,其三通道的偏振敏感方向依次为0°,60°,120°,各通道通过对数放大单元,将光电流转换为可供解算的电压信号,经系统标定,其角度测量误差在±0.2°范围内;2012年,纽卡斯尔大学的Chahl等人[37]模仿蜻蜓的偏振视觉探测机理,设计了包含环境光与天空偏振光感知的多单元仿生偏振探测装置,并将其安装在弹射滑翔机的头部,完成了无人机飞行的航向角测量,如图13所示。

图11 Labhart等人搭建的仿生天空偏振光探测装置及原理示意图Fig.11 Bionic polarized skylight detection device and schematic diagram designed by Labhart et al
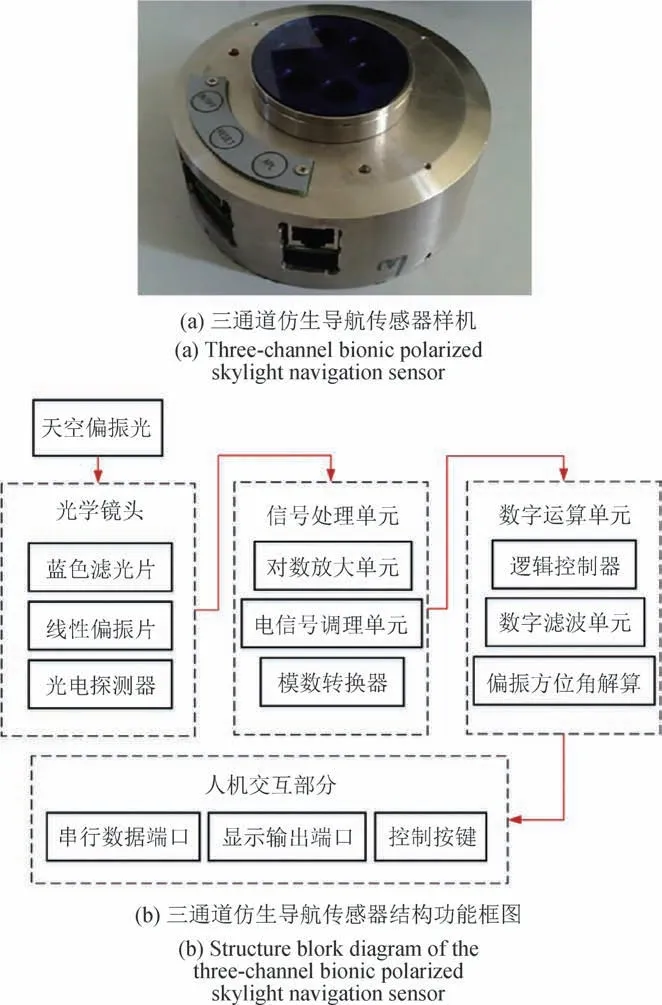
图12 大连理工大学设计的三通道仿生导航传感器样机及传感器结构功能框图Fig.12 Three-channel bionic polarized skylight navigation sensor and structure block diagram of the sensor designed by Dalian University of Technology

图13 Chahl等人开发的仿蜻蜓偏振探测装置Fig.13 The dragonfly-like polarization detection device developed by Chahl et al
随着研究的深入,偏振光导航传感器技术已逐渐走向成熟。现有的偏振光导航传感器,从结构上可分为点源式偏振光传感器和成像式偏振光传感器。点源式偏振光传感器一般由多个分立的感光元件构成,其结构简单,数据单元较少,易于处理,且响应速度和瞬时精度可以达到较高的水平。2014年,大连理工大学褚金奎课题组基于纳米压印工艺,设计并制作了一种集成式偏振光探测阵列[38],该集成器件的微纳结构如图14所示。图中,(a)~(f)光敏区表面不同排列方向的金属光栅,其相对角度分别为0°,60°,120°,90°,150°,30°;在SOI基底上制作六个分立的硅光敏PN结(如图9),并在各光敏区域表面压印不同方向的双层金属纳米光栅作为偏振片,以该器件作为偏振探测单元,研制的集成偏振光导航传感器,具备微型化的特点,且室内标定误差在±0.1°范围内,能够满足偏振导航的要求。
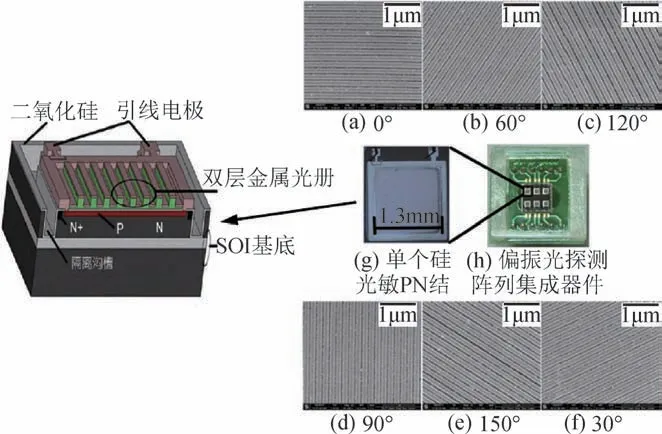
图14 大连理工大学设计的偏振光探测阵列集成器件结构与微形貌Fig.14 Structure and micro morphology of polarization detection array integrated device designed by Dalian University of Technology
近年来,随着半导体技术的不断发展,CCD,CMOS等新型的成像式光敏器件逐步走向成熟。基于MEMS工艺的成像式感光器件,使单位面积上的感光像素数量提高了数十万倍,其数据稳定性明显优于传统的光电二极管阵列。同时,适用于CMOS传感器的天空偏振模式图像识别算法,有效提升了偏振光传感器对于复杂天气的适应能力,这使得成像式偏振光导航传感器具备更佳的测量鲁棒性。2016年,国防科技大学胡小平团队[39]利用四通道CCD相机,设计了一种成像式偏振导航传感器,如图15所示。该传感器的单通道偏振感光单元(如图15(a))由广角镜头、线性检偏片和CCD相机(如图15(b))组成,各通道的偏振敏感方向依次相差45°(如图15(c));经过误差分析与系统标定,其理论测量精度较高,且在室外测量时具有较好的鲁棒性。2020年,大连理工大学褚金奎课题组关传泷等人运用纳米压印技术,将多方向金属线栅压印在CMOS器件表面,实现了成像式偏振探测单元的集成,如图16所示。其中,图16(a)为使用成像式集成单元搭建的传感器样机,图16(b)和图16(e)为集成单元微结构与金属光栅排列方向示意图,其相对角度分别为0°,60°,90°,150°。之后利用该微型器件,设计了一种支持角度实时解算的成像式偏振导航传感器,并通过自适应鲁棒标定算法,实现了误差范围在±0.1°的室内测量精度[40]。

图15 国防科技大学搭建的成像式偏振导航传感器样机Fig.15 Camera-based polarization navigation sensor prototype designed by National University of Defense Technology

图16 大连理工大学开发的成像式偏振探测集成单元及传感器样机Fig.16 Camera-based polarization detection integrated unit and sensor prototype developed by Dalian University of Technology
目前,偏振光导航传感器正朝向微型化、集成化、高精度、强鲁棒性的目标发展;基于多光谱测量、多传感器融合、图像化智能算法技术的新一代偏振光导航测量系统,将获得更加广泛的应用。
3.2 偏振光导航方法的应用
伴随偏振光导航传感器技术的快速发展,基于仿生机理的偏振光导航方法,逐步面向实际导航应用场合。1999年,Labhart等人[41]将自制的仿沙蚁复眼偏振光传感器与环境光传感器安装在Sahabot 2移动机器人上,用以解算朝向信息,并结合光电编码器完成路径积分算法,实现了室外环境下机器人的简单导航任务,如图17所示。

图17 Labhart等人开发的Sahabot 2移动机器人及其搭载的偏振光传感器Fig.17 Sahabot 2 mobile robot and its polarized skylight detection device developed by Labhart et al
2010年,大连理工大学褚金奎课题组[42]基于点源式偏振光导航传感器和光电编码器,搭建了轮式移动机器人自主导航测试平台,并通过轨迹规划实验,实现了无GPS条件下机器人的自主导航,如图18所示。

图18 大连理工大学开发的移动机器人自主导航测试平台Fig.18 Mobile robot autonomous navigation test platform developed by Dalian University of Technology
近年来,针对长距离、复杂场景的现代导航应用,将偏振光导航方法融入组合导航系统,得到了国内外多所研究院校的密切关注。2012年,东南大学祝燕华等人[43]将偏振光导航、惯性导航与GPS导航方法等进行融合,并通过系统动态仿真,验证了偏振光组合导航方法能够有效增强系统导航性能。2015年,大连理工大学王寅龙等人[44]设计了一种基于偏振光场与地磁场模型的自主实时定位样机,如图19所示。通过样机多方向偏振光传感器与电子罗盘提供的实时数据,结合外部的时间与地磁方向信息,能够解算样机所在位置的经纬度信息。

图19 基于偏振光与地磁场模型的自主实时定位样机Fig.19 Autonomous real-time positioning prototype based on polarized light and geomagnetic field model
2017年,大连理工大学支炜等人[45]运用扩展卡尔曼滤波算法,将多传感器信息进行融合解算,并基于四旋翼无人机平台开展了偏振光组合导航飞行实验,如图20所示。其轨迹精度与航姿解算精度均有一定的提升。

图2 蝗虫的DRA小眼结构图Fig.2 DRA ommatidium structure of locusts

图20 无人机平台的偏振光组合导航飞行实验Fig.20 Polarized light integrated navigation flight experiment of UAV platform
2019年,法国马赛大学的Dupeyroux等人[46]开发了一种针对天空紫外波段偏振光的点源式探测装置,将其安装在AntBot仿沙蚁六足机器人上,并运用组合导航方法模拟沙蚁的归巢行为,如图21所示。实验结果表明,偏振光导航方法能够保证“沙蚁顺利归巢”,即有效提升机器人长距离移动后的相对位置重复性。

图21 AntBot仿沙蚁六足机器人及其搭载的天空紫外波段偏振光探测装置Fig.21 AntBot desert-ant-like hexapod robot and its ultraviolet-waveband polarized skylight detection device
4 结论
自然界中,众多生物拥有感知环境偏振光的奇妙能力,引起了研究人员对仿生偏振探测机理的密切关注。通过大量的仿生学研究发现,生物的偏振探测能力,来源于其特殊的复眼DRA结构,与视神经中POL神经元的协同作用;其中,多种昆虫能够利用偏振视觉,辅助个体与种群完成天空环境下的复杂导航任务。
面向理想大气环境,瑞利散射模型相对简单,能够较好地描述晴朗环境下的大气偏振模式分布模式;米氏散射与矢量辐射传输模型,能够解释复杂天气环境下大气散射光的传输过程,但其分析过程较为复杂,相关环境参数不易量化,在实际应用中仍受到诸多限制。近年来,国内外众多研究机构,对天空偏振光分布模式进行了长期的观测与分析,研究结果表明,瑞利散射对天空偏振分布具有指导意义,天空的蓝紫色波段光更利于偏振光探测及导航。
受生物启发的偏振光导航技术,具有完全自主、抗主动干扰、误差不随时间累计的优势。开发偏振光导航传感器,探索仿生偏振光导航方法,为复杂条件下,远距离的目标自主导航与组合导航应用,提供了新的研究思路。目前,偏振光导航传感器正朝向微型化、集成化、高精度、强鲁棒性的目标发展;基于多光谱测量、多传感器融合、图像化智能算法技术的新一代偏振光导航测量系统,将获得更加广泛的应用。
猜你喜欢
物理学报(2022年23期)2022-12-14
空间电子技术(2020年5期)2020-03-11
大东方(2019年1期)2019-09-10
电子制作(2019年12期)2019-07-16
测控技术(2018年6期)2018-11-25
现代职业教育·中职中专(2018年11期)2018-06-11
空中之家(2017年6期)2017-06-12
信息安全研究(2016年8期)2016-11-22
中国中医药现代远程教育(2014年14期)2014-03-01
中国氯碱(2014年11期)2014-02-28
