山区二级公路弯坡组合路段安全性评价①
2021-12-16 08:00袁志兵
建材技术与应用 2021年6期
□□ 袁志兵
(义乌工商职业技术学院,浙江 金华 322000)
引言
设计速度目前仍是我国道路线形设计的关键指标,对道路进行设计时会出现平、纵、横线形都符合线形设计标准,但存在线形一致性较差的问题,易造成事故频发,形成事故黑点。运行速度作为人、车、路及环境耦合作用下的结果,对道路线形设计的连续性能有效地衡量,为道路线形设计以及行车安全分析提供参考。
由于山区二级公路在道路线形、地质条件、气候环境、建设资金等多方面的限制,造成山区公路在进行道路线形设计时,采用较低的技术指标。山区二级公路以急弯陡坡路段为典型,该路段线形一致性较差,行车风险等级较高。因此,对山区二级公路交通安全进行系统的分析与评价尤为重要。
通过分析国内外对山区公路安全性评价的研究发现,评价方法主要分为两大类:一是通过分析道路线形和道路事故率之间的作用机理,构建事故预测模型[1-3],但事故数据的采集难度较大易导致评价结果不佳;二是借助运行速度作为媒介工具,通过道路线形一致性评价对行车安全进行分析,并提出相邻两个路段间的运行速度差值作为安全评价标准[4-6]。
1 工程概况
G108陕西省勉县至宁强段(67.3 km)和G244陕甘界至凤翔段(61.5 km)进行山区二级公路弯坡组合路段运行车速测试与数据采集。其中,K24+820~K39+261段设计速度为60 km/h,路肩宽度为1.50 m;其余路段设计速度为40 km/h,路肩宽度为0.75 m,测试路段均为双向两车道,年平均日交通量约为4 800 pcu/d,路面状况干燥且完整度较好,主要的技术指标见表1。

表1 评价路段主要技术指标
2 评价指标确定
2.1 协调性评价
2.1.1 惯性运行速度
Llopis-Castelló D提出惯性运行速度概念[7]:该速度是代表驾驶员的期望,该过程依赖于驾驶员的记忆性。惯性运行速度被定义为对运行速度的加权。通过该断面与预测点位置间的距离计算权重值,从而获取该断面的惯性运行速度,并提出四个典型权重变化函数如图1所示,公式如下:
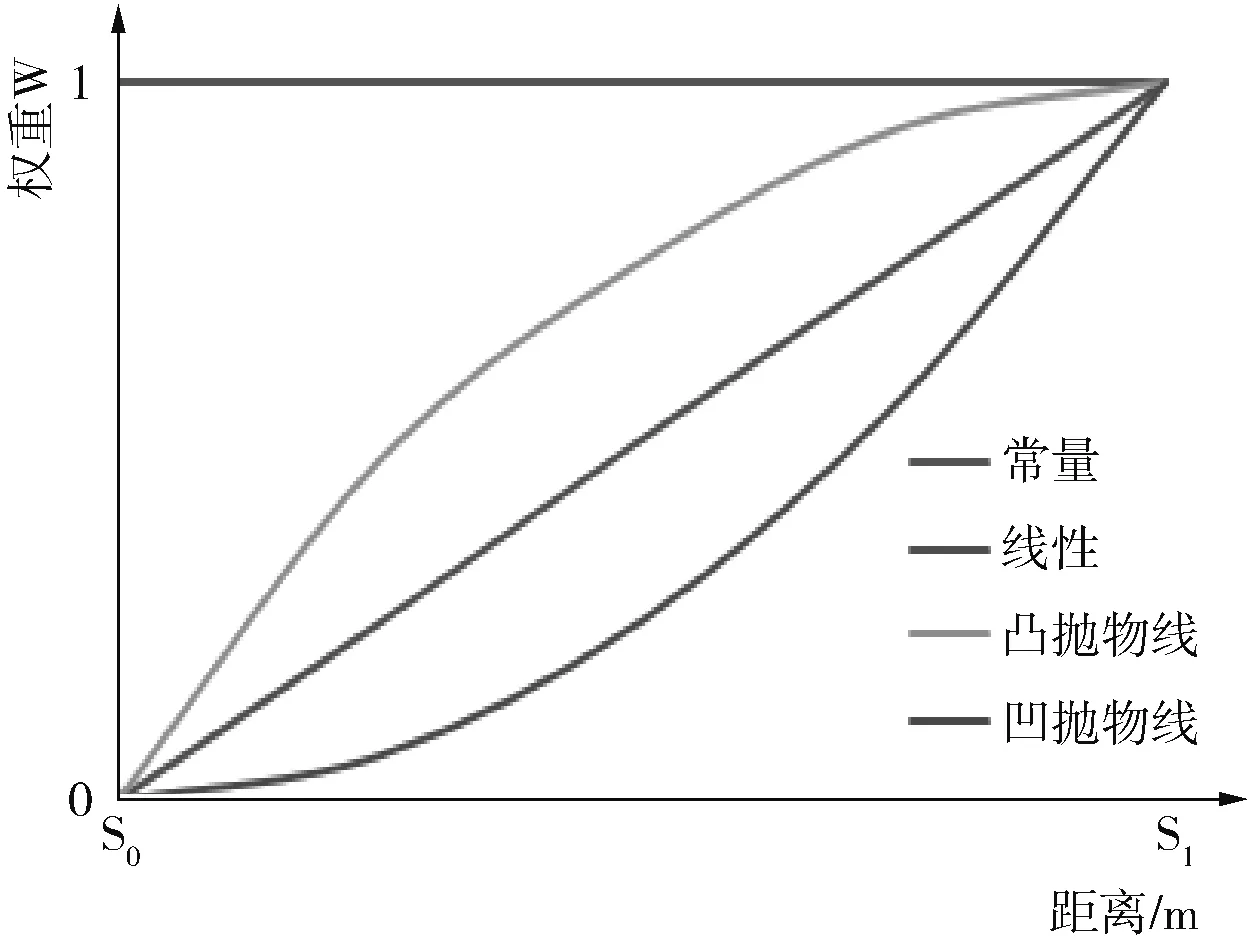
图1 权重函数分布形式
ω常=1
(1)

(2)

(3)

(4)
权重值在0~1之间,距离预测点位置越远权重值越小。其中sj为j处位置,ωj为j处位置的权重值,s0和s1为起始点位置和终点位置。其中vi,j为i点惯性运行速度;v85,j为j处的运行速度,ωj为j相对于点i处的权重。距离预测点位置宜控制在1 000 m以内。其中,惯性运行速度计算公式为:
(5)
JTG B05—2015《公路项目安全性评价规范》(以下简称“《规范》”)中运行速度计算模型中并未存在时间参数,需对使用距离进行替换,徐婷[8]提出驾驶员记忆时间与记忆准确百分比间关系,见表2。

表2 记忆保持时间以及记忆准确性百分比关系表
JTG D20—2017《公路路线设计规范》指出受地形、地质条件限制时,干线二级公路宜采用60 km/h,本文采用该设计速度对记忆保持时间进行换算,结果见表3。

表3 距离预测点位置以及记忆准确性百分比关系表
使用数据分析软件对变量距离预测点位置以及记忆准确性百分比(权重)分析,结果见表4。

表4 权重分布方程模型统计
通过对变量距离预测点位置(m)以及记忆准确性百分比(权重),上述三种函数模型均具有很强的显著性,但对R2分析发现:指数模型和三次函数模型曲线优于二次函数模型,但三次函数较指数函数模型计算更为复杂,宜采用指数函数确定权重。两者关系表达式为:
ω=0.88e-0.001sR2=0.98
(6)
式中:ω——权重;
s——距离预测点距离,m。
2.1.2 评价标准
协调性评价采用相邻路段运行速度差值的绝对值|Δv85|以及惯性车速差ΔI[9]来表示。对道路线形协调性评价是保证驾驶员行驶的连贯性,降低行车风险的重要举措。协调性计算公式如下:
|Δv85|=|v85i-v85i-1|
(7)
ΔI=v85i-v85惯i
(8)
式中:|Δv85|——运行速度差值,km/h;
v85i——断面i的运行速度,km/h;
v85i-1——断面i连续的前一段面运行速度,km/h;
ΔI——惯性车速差,km/h;
v85惯i——断面i的惯性运行速度,km/h。
IHSDM运行速度一致性评价标准指出,相邻路段上运行速度的差值≯10 km/h时,道路线形设计为“优”,潜在的安全隐患较少;而当相邻路段上运行速度的差值介于10~20 km/h之间时,道路线形设计为“较好”,潜在的安全隐患较多;而当运行速度的差值>20 km/h时,道路线形设计为“差”。车辆处于曲线路段时,进行协调性评价宜从曲线中点分开分析,评价标准同IHSDM一致。Alfredo G研究发现当惯性运行速度与运行速度差值>20 km/h时,道路线形设计的一致性也显示为“差”,运行速度协调性评价标准见表5。

表5 运行速度协调性评价标准
2.2 稳定性评价
车辆在曲线段运行时会受到离心力的作用,在曲线路段超高横坡度和横向力系数耦合作用能够平衡车辆在曲线路段产生的离心力,从而确保在曲线路段行驶时行车的稳定性。超高横坡度与横向力系数的计算公式如下:
(9)
式中:R——曲线半径,m;
v——车辆运行速度,km/h;
μ——横向力系数;
i——超高横坡度。
对于在曲线段行驶的车辆来说,横向力系数μ对车辆稳定性有着显著影响。当μ值增大时,驾驶员则需降低车辆运行速度以保证车辆安全平稳行驶。依据JTG D20—2017《公路路线设计规范》μ采用0.10~0.17,运用横向力系数进行行车稳定性评价标准见表6。

表6 运行速度稳定性性评价标准
3 数据分析
3.1 运行速度分析
试验采用Metro Count 5600气压管式车辆分型统计系统分别采集车型及车速数据。参考《规范》和试验设备对车型划分标准,将轴距≤3.2 m的车定义为小型车。为确保测试数据具有代表性和可比性,主要在白天天气晴好、路面干燥、自由流交通(车头间距为5 s或车辆间距为120 m以上)条件下进行测试。测试位置的选择重点考虑平曲线上车速变化规律,分别将观测点设在曲线的入口、中点以及出口,如图2所示。
其中断面编号1~11分别为K13+183(ZH)、K13+240(QZ)、K13+292(GQ)、K13+347(QZ)、K13+413(QZ)、K13+490(QZ)、K13+555(GQ)、K13+598(QZ)、K13+641(GQ)、K13+700(QZ)、K13+700(QZ)、K13+770(HZ),测量结果见表7~表9。

表7 G108国道评价断面惯性运行速度(上行方向) km/h
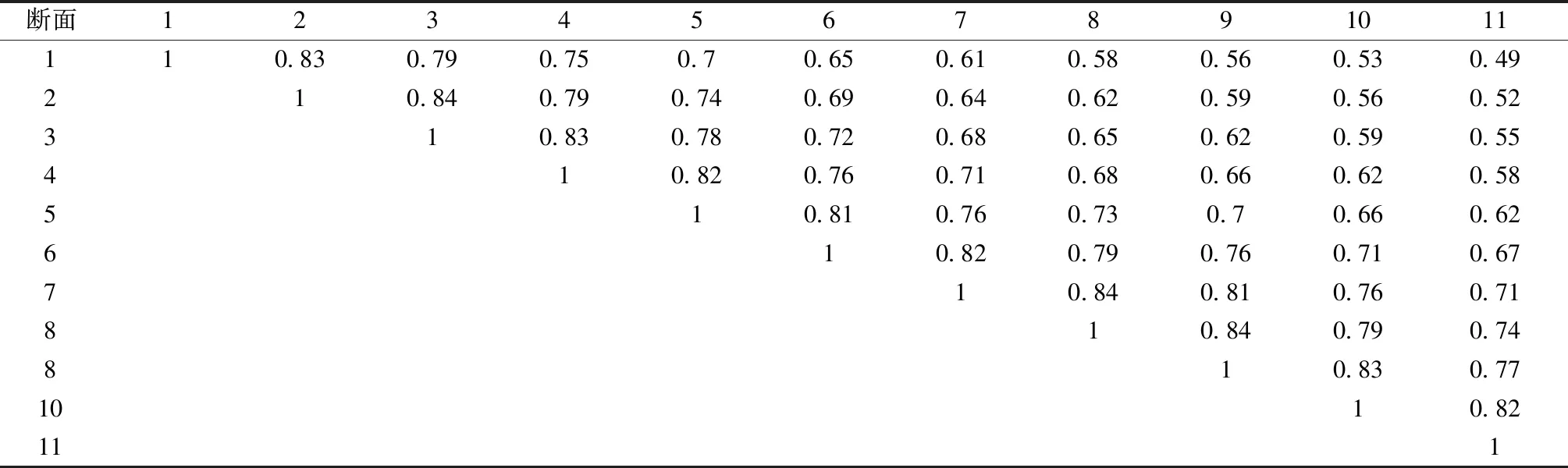
表8 G108国道评价断面间权重系数矩阵(上行方向)

表9 G108国道评价断面惯性运行速度(上行方向) km/h
3.2 路段安全性分析
选择Δv85和ΔI作为评价指标。对行车稳定性评价时依据计算公式选择运行速度较大值(此时车辆的稳定最差),且利用曲线中点速度评价曲线前半段车辆行驶的稳定性,用曲线出口速度评价曲线后半段车辆行驶的稳定性。评价指标计算结果见表10。

表10 G108上行弯坡组合路段安全评价指标
上述路段的超高横坡度设计值均为5%,由上述统计表格可知:不同车型在特征断面间的速度差值和惯性车速差均较小,但由于路段半径较小且车辆的运行速度较大使得横向力系数较大。
对选取G108国道上行弯坡组合路段的安全评级指标计算,结合基于运行速度的协调性性、稳定性指标评价标准对弯坡组合路段的上行方向行车安全进行分析,得到断面的安全等级见表11。
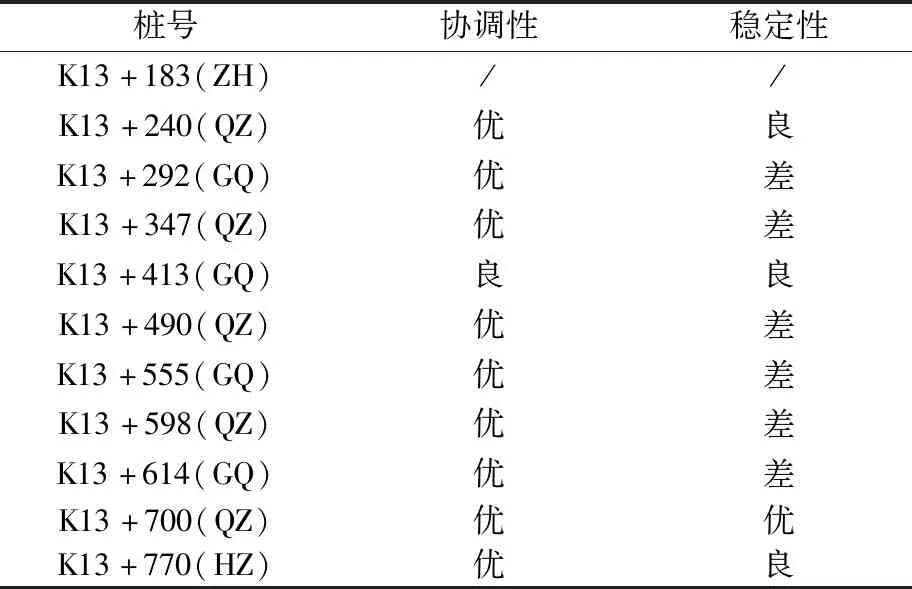
表11 G108上行弯坡组合路段安全评价等级
3.3 安全措施
建议对G108评价路段的车辆行驶速度进行限定,车辆上行时行车稳定性在多个弯道处难以得到保证。当车辆行车稳定性安全等级表现为良好时,利用该路段极限半径计算。行车稳定性为良好时的临界速度为50.65 km/h。因此,建议对该路段上行方向均进行50 km/h的限速规定。通过安全评价指标发现下行时路段入口处运行速度差值较大,建议在上游路段设置减速标志,提醒驾驶员减速。
上述评价的路段均为连续急弯路段,在此路段设置视线诱导标志可以使驾驶员提前获悉线形急剧的变化,清晰道路轮廓,可以有效降低行车风险,减少交通事故。
4 结语
(1)使用气压管式车辆分型统计系统MC5600在弯坡组合路段的特征点进行断面车速观测,获取断面运行速度。
(2)通过驾驶员记忆时间与记忆准确百分比分析,对惯性运行速度的权重函数进行确定,研究发现其函数表达更符合指数函数形式。
(3)基于运行速度的协调性和行车稳定性等指标对山区公路的行车安全进行评价。仅局部路段稳定性指标较差,需采用相应的限速或安全保障措施。
猜你喜欢
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
铁道建筑技术(2021年3期)2021-07-21
西部交通科技(2021年9期)2021-01-11
中学生数理化·八年级物理人教版(2017年3期)2017-11-09
汽车与安全(2016年5期)2016-12-01
中国塑料(2015年1期)2015-10-14
汽车维修与保养(2015年12期)2015-04-18
现代企业(2015年4期)2015-02-28
中学生数理化·八年级物理人教版(2014年1期)2015-01-09
中国交通信息化(2014年4期)2014-06-05