
广义离散时间系统的P-D 反馈控制器设计
2021-12-15 02:38:14任祯琴李静李德光
应用科技 2021年6期
任祯琴,李静,李德光
洛阳师范学院 信息技术学院,河南 洛阳 471934
广义系统是比正常系统更一般的动力系统,有着广泛的应用背景。广义系统大量出现在电力系统、能源系统、经济系统、宇航系统和化学过程等描述中[1-4],这是因为实际应用中,广义系统较一般系统可以用来描述系统更多的性能特征。随着科学研究的深入,广义系统被学术界广泛关注,广义离散时间系统理论已有了丰富的研究成果[5-7].
对于正常系统,反馈控制的研究已经趋于完善。但对于广义系统来说,脉冲的存在可能引起系统不能正常运行甚至导致系统的损坏,这就需要所设计的控制器不仅要保证闭环系统是稳定的,而且是要正则化和因果的(连续系统无脉冲),即容许性。而P-D 反馈控制在这方面发挥了很大的作用,它是消除脉冲的一个很有效途径,相关研究已取得了一些成果[8-14]。但由于P-D 反馈控制器在实际处理时的负面影响,很难使闭环系统达到稳定。然而随着先进的生产设备和计算机的迅速发展,大大降低了这种负面影响,使得P-D 反馈具有很高的理论意义和工程实际应用价值。
本文针对广义离散系统设计出一种简单的PD 反馈控制器,突破了文献[13]中输出反馈控制器的局限性,使闭环系统更容易达到稳定,并消除了脉冲。
1 预备知识及问题描述
考虑如下的广义离散时间系统:

式中:x(k)∈Rn为状态向量;u(k)∈Rr为输入向量;E、A、B为具有适当维数的常数矩阵;E为奇异矩阵,满足rank(E)<n。
定义1[15]若存在复数s0,使得det(s0E-A)≠0,那么称式(1) 广义离散时间系统是正则的。
本文假定广义离散时间系统是正则且能稳定的。
定义2[15]若对任意复数z满足degdet(zE-A)=rank(E),则称广义离散系统是因果的。
定义3[15]如果式(1)正则广义离散时间系统是因果且稳定的,则称系统是容许的。
定义4[15]如果存在P-D 反馈,使闭环系统成为正常系统,则称广义离散系统是能正常化的。
下面给出本文需要用到的相关引理。
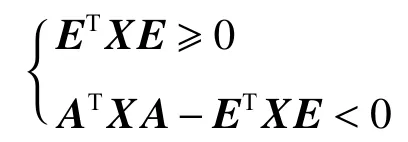
引理1[15]式(1)广义离散系统是容许的充要条件为:存在对称矩阵X∈Rn×n满足如下广义Lyapunov 不等式:
引理2[16]对于正常系统x(k+1)=Ax(k)+Bu(k),设性能指标函数为
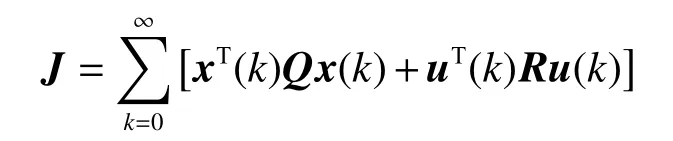
式中:Q为对称半正定矩阵,R为对称正定矩阵。系统满足能稳定,能检测,则最优状态反馈控制器为

其中P为黎卡提方程

的对称半正定解.
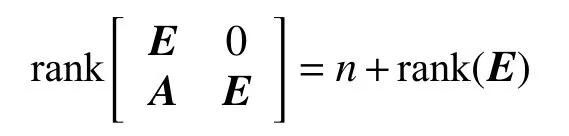
引理3[15]式(1)广义离散系统是因果的充要条件为
引理4[15]式(1)广义离散系统是稳定的充要条件为:它的有限极点集合σ(E,A)是在复平面的单位圆内(用Ω(0,1)表示)。
引理5[15]式(1)广义离散系统能稳定的充要条件为

引理6[15]P-D 反馈保持了广义系统的能稳定性。
为了研究的需要,我们要对系统进行正常化的分解。所谓正常化分解,就是通过线性变换将原系统分解为2 个子系统,其中1 个子系统是能正常化的,即转化为正常系统,具体过程如下。
考虑式(1)广义离散系统:
1)若系统是正则的,则一定存在非奇异矩阵Q1、P1,使得
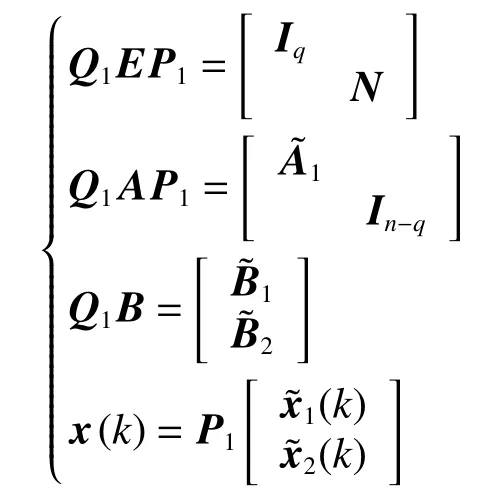
式中:N为幂零矩阵,那么,式(1)广义离散系统将改写为


则式(2)改写为
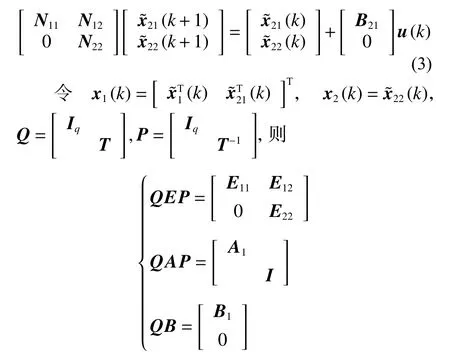
式(2)可改写为
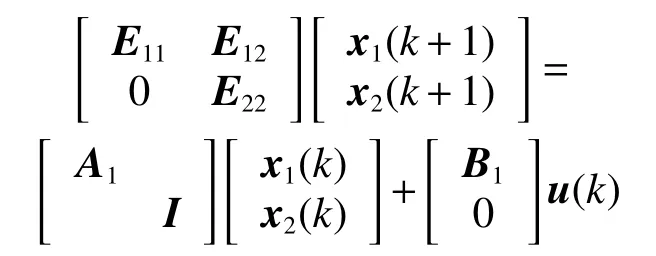
即
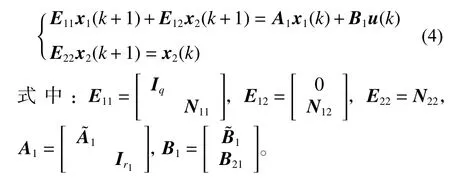
正文中已经得到x2(k)=0,则式(4)可改写为

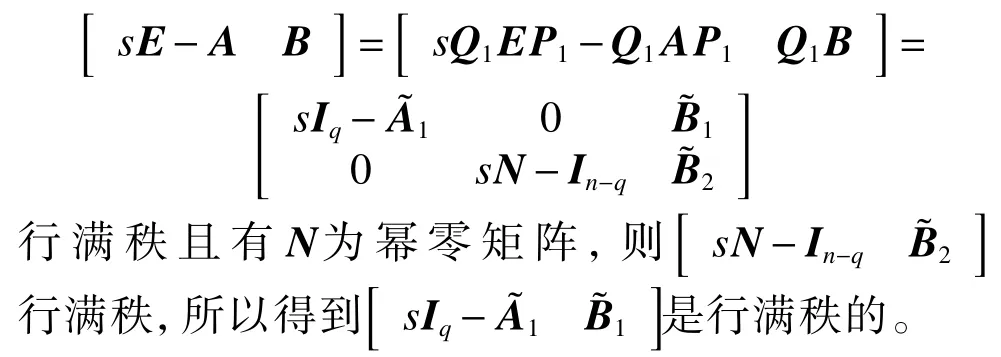
下面证明若原式(1)广义离散系统是能稳定的,则式(5)是能稳定的。由引理5,我们只需证明∀s∈C,|s|≥1,行满秩,其中

首先N11是幂零矩阵,则是行满秩的;原系统是能稳定的,则
将式(1)广义离散系统进行正常化分解得
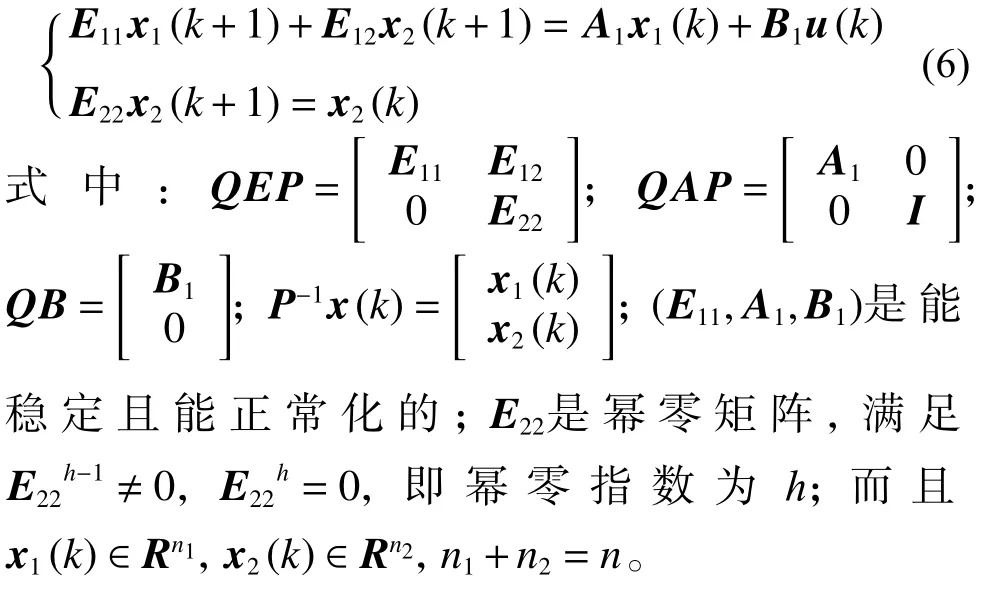
由式(6)中E22x2(k+1)=x2(k)得:
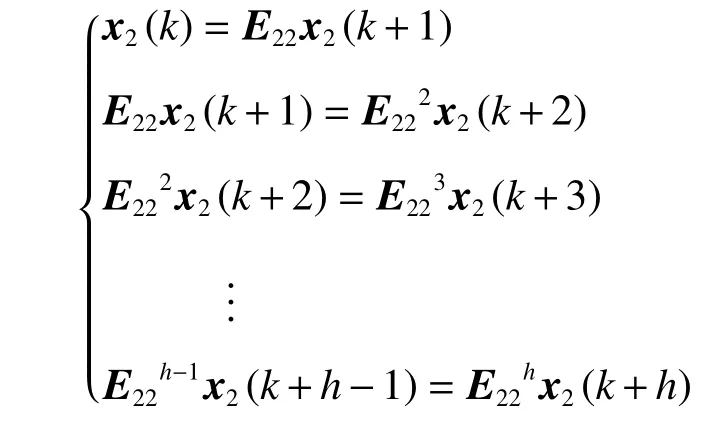
将式(7)左右分别相加并相消得:

所以式(6)可改写为

由于式(8)是能正常化的,则一定存在P-D反馈:

使得闭环系统

成为正常系统。
我们选择一个合适的K2使得
2 P-D 反馈控制器的设计
本文的主要研究工作是设计一个P-D 反馈控制器,使得闭环系统是容许的。首先对原系统进行正常化分解,得到的子系统是能正常化的。在此基础上,设计了一个P-D 反馈控制器。为了获得控制器存在的充分条件,有如下定理。
定理1对于式(8),若存在P-D 反馈控制器式(9),使得闭环系统式(10)是容许的,条件是存在一个对称正定矩阵Y,合适维数的矩阵Z满足线性矩阵不等式(11):

式中:

证明: 由于det(E11+B1K2)≠0,则E11+B1K2可逆,显然满足引理1 中的ETXE≥0,即(E11+B1K2)TY(E11+B1K2)≥0,又有
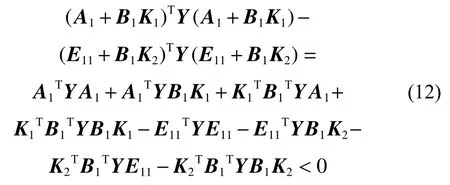
令

式(12)将改写为

利用schur 补引理[16],我们可以将式(14)转化为线性矩阵不等式(11),其中:证毕。

通过Matlab 求解式(11),可以求得Y、Z的值[17]。
接下来利用式(13)和Y、Z的值来求得K1的值,这就需要利用广义逆的理论[18]。
由式(13)可得

下面我们利用广义逆的知识来求得K1的值,先将B1进行满秩分解,记为B1=MN,其中M列满秩,N行满秩。若式(15)有解,则K1=NT(NNT)-1(MTM)-1MTY-1Z是式(14)的极小范数解;若式(15)无解,则K1=NT(NNT)-1(MTM)-1MTY-1Z是式(11)的极小范数最小二乘解,也称最佳逼近解,需要进一步验证式(11)。
对于式(10),我们可以将其变形为正常系统:
对于式(16),定义性能指标函数为

式中:F为对称半正定矩阵;G为对称正定矩阵,且满足能检测。
再由正常化分解的方法以及引理5 和引理6,可以得到式(16)是稳定的。运用引理2,就可以得到式(16)的状态反馈控制器为

并使得闭环系统是稳定的。其中P1是代数黎卡提方程的对称半正定解:

由此,将式(18)代入P-D 反馈控制器式(9),得到原系统式(1)的P-D 反馈控制器为

将式(20)代入式(1)可得闭环系统为
本定理得到的是P-D 反馈控制器存在的充分条件,而引理1 给的是广义离散系统容许的充要条件,这是因为本定理中为了利用Matlab 中的LMI 工具箱,规定Y是对称正定矩阵,而引理1 中的X是对称矩阵,这是在以后的研究中需要改进的地方。在定理1 的基础上,给出式(1)广义离散系统的P-D 反馈控制器设计的定理。
定理2对于式(1),存在一个对称正定矩阵X和合适维数的矩阵Z满足下面线性矩阵不等式:
式中:

则一定存在一个P-D 反馈控制器如式(20),使得闭环系统(22)是容许的。
利用定理2 时,我们需要先将原系统式(1)进行正常化分解,可以借助计算机。下面利用一个数值算例来说明本文设计方法的正确性和有效性。
3 数值算例
考虑形如式(1)的广义离散系统:

首先有det(2E-A)≠0,说明系统是正则的;又有rank满足引理5中的条件,所以系统满足能稳定性。
通过计算得式(20)中的增益矩阵为
闭环系统式(17)的系数矩阵为
下面通过验证说明在设计的控制器下,所得的闭环广义系统是容许的。
综上,我们验证了所得的闭环广义系统是容许的。这一结果说明了本文通过对原系统进行正常化分解所得到的P-D 反馈控制器是有效的。
图1 是输出响应曲线,从图中可以看出利用现代控制理论和变量替换法使得闭环系统是容许的、稳定的。
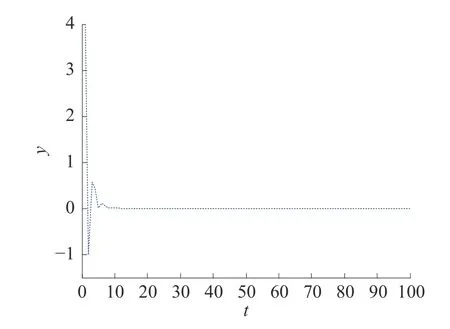
图1 输出响应曲线
4 结论
广义系统存在脉冲行为,会导致系统不能正常运行甚至崩溃。而P-D 反馈控制器是消除脉冲的一个很好方法,于是本文通过引入了P-D 反馈控制器来消除脉冲,从而使得系统是稳定的、容许的,并给出了闭环系统容许的条件。
1)通过对式(1)系统正常化分解推导出子系统能正常化。
2)给出了P-D 反馈控制器存在的条件,使得式(10)系统是容许的,并且得到了相应的LMI 条件。为了求解方便,利用Matlab 中的LMI 工具箱,但是要求里面矩阵是对称矩阵,这是在以后的研究中需要解决的问题。
3)给出了式(1)系统控制器存在的条件。
猜你喜欢
日本研究(2023年2期)2023-11-29 12:16:44
哈尔滨商业大学学报(自然科学版)(2022年4期)2022-08-18 13:07:30
吉林大学学报(理学版)(2020年3期)2020-05-29 06:31:40
三峡大学学报(自然科学版)(2019年5期)2019-10-17 02:24:22
数学物理学报(2017年5期)2017-11-23 07:51:08
人民中国(日文版)(2016年10期)2016-08-23 11:21:14
齐鲁周刊(2015年38期)2015-12-11 09:23:52
三峡大学学报(自然科学版)(2015年2期)2015-07-25 06:42:56
四川师范大学学报(自然科学版)(2015年2期)2015-02-28 14:07:41
山西大同大学学报(社会科学版)(2014年6期)2014-01-22 06:09:11
