
果实采摘机器人柔性机械手的设计
2021-12-10 06:27:58田宝连
农业技术与装备 2021年10期
田宝连
(江西工业职业技术学院,江西 南昌 330000)
1 柔性机械手整体设计
果实采摘机器人柔性机械手主要包含PLC 自动控制模块、机械手爪构件、机械手连接件、气动控制部件、主体机械承载机构、报警模块等6个部分。其中,PLC 自动控制模块用于组建整个系统的硬件回路,实现对柔性机械手采摘的循环自动控制;机械手爪是完成果实采摘的主要机构;连接件是手爪与气动控制部件的连接模块;主体机械承载机构用于装载整个机械手、PLC 模块、电源模块、报警模块等部件;报警模块用于对机械手运行中可能出现的过压、过载、过流等故障进行报警,且出现报警故障,系统会自动断电。柔性机械手整体设计框图,见图1。
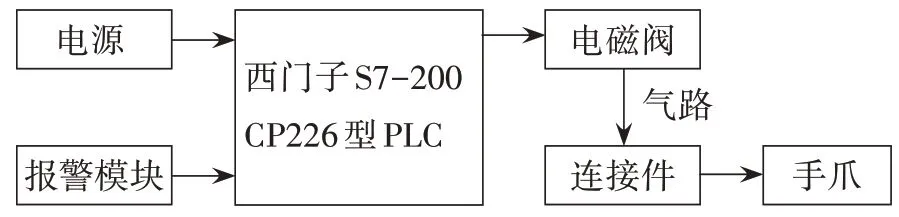
图1 柔性机械手整体设计框图Fig.1 The overall design block diagram of flexible manipulator
2 柔性机械手机构设计
2.1 手爪设计
手爪是采摘果实的主要机构,由气缸组件和手爪组件2个部分构成。其中,气缸组件是气路连通和能量传输的载体,由于在采摘果实的过程中,机械手需要执行“上升-旋转定位-抓取果实-下降-旋转复位-松开果实”系列动作,因此,在气缸的配置上,包括给手爪“抓取松开”动作提供能量的手指气缸、给手爪“旋转定位复位”动作提供气能的旋转气缸、给手爪“上升下降”动作提供能量的旋方型气缸。手爪组件采用硅胶制作,制作的流程为:采用autoCAD 软件制作手爪三维模型,应用3D 打印技术制作手爪模具;制作手爪内胆;将内胆放入手爪模具,浇注硅胶,等待手爪固定成型。
2.2 连接件设计
连接件是手爪机构与气路气管连接的部件,起固定柔性手爪和保证气路气密性的作用。首先,在保证气路气密性设计上,通过应用生胶带固定连接螺栓,在生胶带的缠绕上务必做到仔细,尽可能多绕几圈;其次,在柔性手爪固定设计上,在连接件内部顶端设计了3 个气管气路与三指手爪连接的通道,并通过螺栓加固连接气路通道。完成连接件设计后,需要通过反复的采摘试验测试气密性和手爪牢固程度,确保手爪在完成果实采摘循环动作中不会出现漏气、掉落等故障。
2.3 气动控制设计
气动控制部分为手爪采摘果实动作提供能量,包含电磁阀、气动管、磁性开关、缓冲阀、节流阀、消声器等部件。在结构设计上按照“柔性手爪通过气管连接气动电磁阀”“气动电磁阀连接气源”的方式构成。此外,在柔性手爪上安装数个磁性开关传感器,用来精确检测手爪采摘果实的状态。缓冲阀、节流阀可调整气压,以确保手爪采摘果实动作的稳定性,消声器用于降低手爪循环动作时产生的噪音。
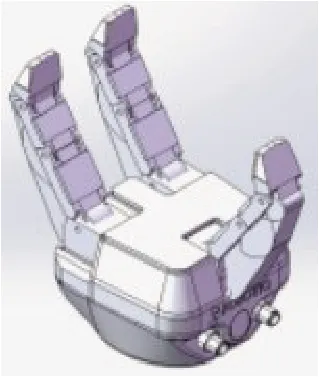
图2 手爪设计图Fig.2 The design drawing of gripper
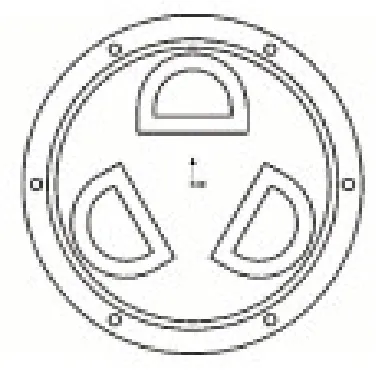
图3 连接件设计图Fig.3 The design drawing of connector

图4 气动控制连接图Fig.4 The pneumatic control connection diagram
3 机械手采摘自动控制设计
3.1 PLC电气控制回路
系统以西门子S7-200型PLC为硬件核心设计,还包括外接继电器、接触器、开关、报警指示灯、电气适配件等。此外,为柔性机械手采摘动作控制分配合适的I/O 地址也是设计的核心项目,具体来说,本系统的输入电气地址包括:I0.0(系统启动开关)、I0.1(系统停止开关)、I0.2(手爪上升限位磁性开关传感器)、I0.3(手爪下降限位磁性开关传感器)、I0.3(手爪旋转限位磁性开关传感器)、I0.4(手爪抓紧限位磁性开关传感器)、I0.5(连接件传感器);本系统的输出电气地址包括:Q0.0(手爪上升驱动电磁阀线圈)、Q0.1(手爪下降驱动电磁阀线圈)、Q0.2(手爪旋转驱动电磁阀线圈)、Q0.6(手爪驱动电磁阀线圈)、Q0.4(报警指示灯驱动线圈)。此外,在具体的PLC电气控制回路配置上,应在接线中严格检查各传感器、电磁阀、气路气管、输入输出控制端子的连接密封情况,确保柔性手爪的循环采摘作业质量。
3.2 循环采摘程序
基于PLC 编译的果实循环采摘梯形图程序流程图,见图5。整个程序的编译执行思路为:启动设备,系统完成复位和自检,机械手初始位为“下降限位+松开限位+旋转复位”状态;机器人柔性机械手运行至果园对应的采摘区域;柔性机械手按照“上升-旋转到位-采摘抓紧-旋转复位-下降-松开放果”的循环流程执行采摘作业;采摘过程中若PLC 连接的传感器检测到掉果、漏摘、过压、过载、过流等故障问题,系统指示灯会闪烁,并自动停止采摘作业;若采摘过程中没有发生故障,柔性机械手会自动循环执行采摘作业,直至技术人员按下停止按钮,系统才会停止采摘。此外,系统运行过程中若出现停电、故障急停,会导致的机械手未能停在初始位,特编译了机械手再次通电后的自动和手动复位程序,即:重启系统后,倘若发现机械手未能停在初始位,技术人员可按下手动复位开关(I0.6)或自动执行SM0.1 初始化程序,使机械手回到初始位置,具体的梯形图程序见图6。

图5 循环采摘程序流程图Fig.5 The flow chart of circular picking procedure

图6 机械手复位程序Fig.6 The manipulator reset procedure
4 结语
系统完成设计后,在果园中进行了运行试验,结果显示:该款机械手针对农作物果实的采摘成功率为100%,没有出现掉果、漏摘等问题,稳定性、可靠性和应用性良好,在农作物果实自动采摘生产领域具有一定的推广价值。
猜你喜欢
组合机床与自动化加工技术(2021年3期)2021-03-26 05:43:32
航天控制(2020年5期)2020-03-29 02:10:34
电子制作(2018年24期)2019-01-03 02:30:30
机电元件(2018年4期)2018-08-09 12:17:38
荣誉杂志(2017年7期)2017-08-23 08:05:59
铁道科学与工程学报(2015年4期)2015-12-24 12:11:17
机械工程师(2014年12期)2014-12-23 06:44:04
振动、测试与诊断(2014年5期)2014-03-01 01:14:26
河南科技(2014年12期)2014-02-27 14:10:37
土木建筑工程信息技术(2013年4期)2013-10-17 02:27:54
