SiPM激光雷达阳光下探测概率性能分析
2021-12-07 07:11陈建光倪旭翔严惠民
光电工程 2021年10期
陈建光,倪旭翔,袁 波,严惠民
SiPM激光雷达阳光下探测概率性能分析
陈建光,倪旭翔,袁 波,严惠民*
浙江大学光电科学与工程学院,浙江 杭州 310027
硅基光电倍增管(SiPM)是由数百乃至数千单光子雪崩二极管(SPAD)组成的阵列,它具有增益高、易于集成到阵列以及抗干扰等优点,在激光雷达测距方面具有广泛的应用前景。本文分析了激光雷达测距中的信号和噪声模型,仿真计算了阳光下的SiPM模拟输出,通过高斯拟合得到相应的均值,并在SPAD接收光子受激发概率服从泊松分布的基础上,给出了背景光电子数在0.001个/ns~0.01个/ns,探测器死时间在5 ns~50 ns范围内受背景光影响的SiPM模拟输出计算公式,推导了目标探测概率表达式。在室外环境光下进行的激光测距探测概率实验结果与理论计算值相吻合。
硅基光电倍增管;背景光;死时间;激光测距;探测概率
1 引 言
激光雷达测距技术具有精度高、测程远、受背景干扰小、能够短时间内获取目标距离信息等优势,近些年在自动驾驶、深度成像等领域得到了越来越广泛的应用[1-4]。激光雷达测距技术包括三角测距法、ToF (time of flight)测距法、AMCW(amplitude modulation continuous wave)测距法等,其中ToF技术利用激光器向目标发射脉冲,通过记录激光往返时间来计算目标距离,相比其他方法原理简单,功耗要求较低[5]。
脉冲回波信号能量随探测距离的平方衰减,因此光电探测器要有一定的放大倍数。雪崩光电二极管(aualanche photo diode,APD)作为一种常见的光电探测器,响应速度快,应用广泛,但电流增益较小,一般为102~103。单光子雪崩二极管(single photon avalanche diode,SPAD)是处于盖革模式的APD,它的增益达到105~107,能够进行单光子事件响应,但在背景噪声条件下,需进行较多次测量,利用光子事件累计计数把距离信息从噪声和暗计数中提取出来,处理过程复杂[6]。
硅基光电倍增管(Silicon photomultiplier,SiPM)是一种新型的光电探测器。SiPM也被称为MPPC(multi-pixel photon counter),它是由数百乃至数千个SPAD组成的阵列,电流增益与单个SPAD一致。在存在背景光的条件下,部分SPAD单元响应背景光子并受死时间效应影响保持“淬灭”,但其他SPAD单元仍处于“就绪”状态[5],因此不影响对激光回波信号的探测。近几年在自动驾驶领域应用的激光雷达有阵列化和小型化的趋势,SiPM凭借易于集成到阵列、工作电压低等优点[7],在激光雷达测距与成像方面得到了许多研究和应用。2009年,Kyu Tak Son等人[8]首先进行了SiPM作为激光雷达探测器可行性实验的研究;2013年,国内的张国青等人[9]在不考虑死时间效应的情况下对MPPC应用到激光雷达测距的探测率和虚警率进行了公式推导,验证了MPPC的单光子分辨能力;Ravil Agishev等人[10]分析了基于SiPM的激光雷达在真实环境中探测的各种限制,包括环境噪声和内部噪声等;2019年,日本的Sagamihara等人[11]搭建32~32 SiPM阵列并进行了flash激光雷达三维成像,设计的电路系统使时间分辨率达到326 ps;刘鸿彬等人[12]提出了一种基于少光子的高精度测量方法,实现了在随机噪声下的高精度测距。
在很多场景下,激光雷达测距会受到背景光的干扰。目前关于SiPM受环境光影响的分析一部分只是定性描述,一部分涉及到公式推导[13-15],但是把SiPM内SPAD的输出看作是二值的,和有些SiPM的真实情况有所出入。本文针对被动淬灭的SiPM器件,采用仿真方式,详细分析背景光影响下SiPM模拟输出分布情况,并推导相应的探测概率表达公式,最终搭建实验系统进行验证。
2 测距模型
2.1 信号和噪声模型
环境中的目标可视为朗伯反射体,假设探测目标始终充满视场,经目标反射回来的激光信号被光电探测器接收,SiPM中单个SPAD对单脉冲激光产生的平均光电子数可以用激光雷达方程计算[6]:

激光雷达系统中的噪声主要来自探测器视场内的背景光噪声和内部的暗计数,这两部分是随机独立的,因此总的噪声是二者的线性叠加。暗计数与探测器本身的性能有关[6],一般取值小于1 kHz。当背景光较强时,可以用背景光噪声代替总噪声。
背景光噪声水平可由下式表述:

2.2 背景光下SiPM模拟输出仿真分析
在大多数情况下,经目标反射到达探测器的光子数服从泊松分布[9],光电转换产生的光电子数也服从泊松分布。因此当到达SPAD表面的平均光子数恒定时,SPAD产生光电子数为的概率满足:
其中为平均光电子数。

式(4)也被解释为SPAD的被占据概率。

图1 Matlab仿真流程图
图2为不同背景光电子数及死时间情况下仿真得到的SiPM模拟输出分布情况,都近似为高斯分布。
这样在不同dead,不同n的情况下,可以通过高斯分布拟合得到SiPM模拟输出的均值,再除以SPAD单元总数就得到SiPM中平均每个SPAD单元模拟输出幅度SPAD。我们用Matlab编写程序仿真分析了n在0.001个/ns~0.01个/ns,dead在5 ns~50 ns范围内的SPAD,并从部分拟合数据中发现SPAD和n与dead的乘积有关,如表1所示。

图2 SPAD单元总数为1000时,SiPM模拟输出分布及高斯分布拟合。(a) Nn=0.001, tdead=20 ns; (b) Nn=0.001, tdead=40 ns; (c) Nn=0.005, tdead=20 ns; (d) Nn=0.005, tdead=40 ns
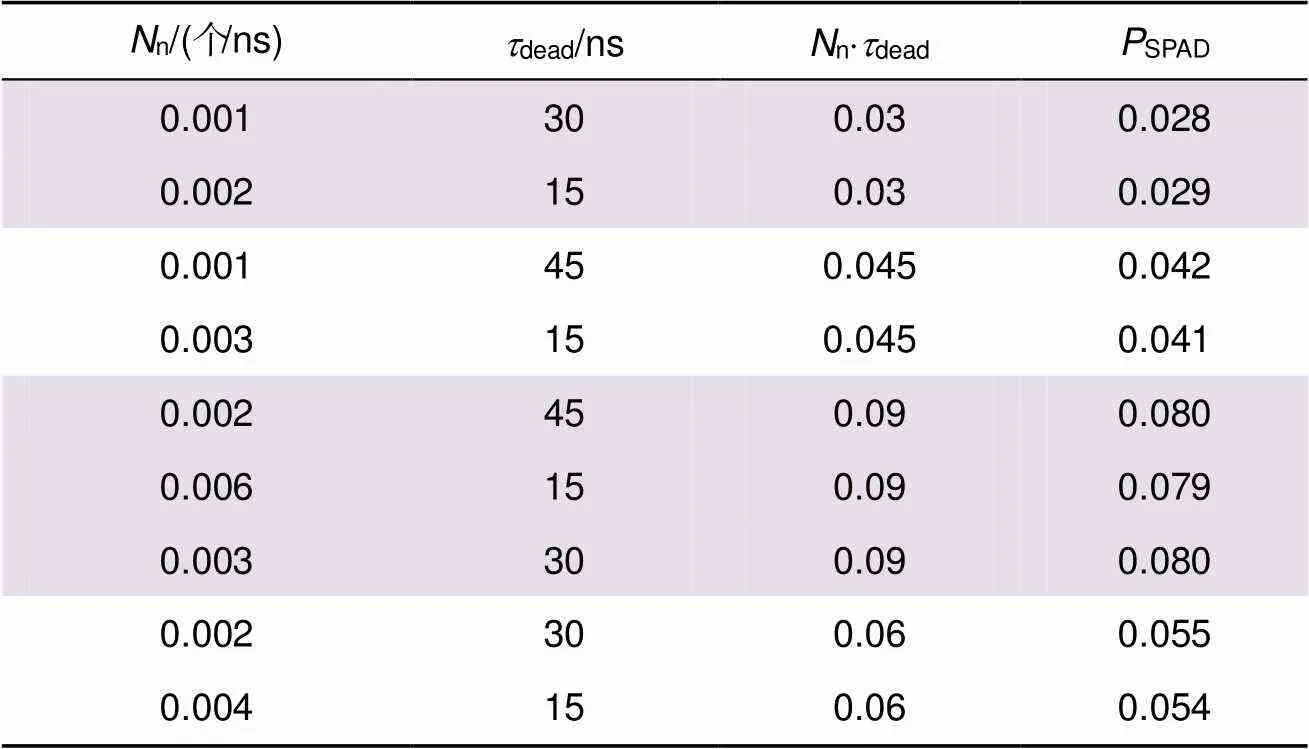
表1 不同背景光电子数及死时间下平均每个SPAD输出幅度
n×dead表示死时间范围内累积的背景光电子数,表1数据启示我们在拟合不同背景光水平或死时间情况下SPAD单元模拟输出表达式时,可以将n×dead作为一个整体,从而降低拟合的复杂程度。同时考虑到单个SPAD吸收光电子被激发的概率服从泊松分布,假设表达式为泊松分布的近似形式,最终拟合表达式曲线与仿真数据点分布情况如图3所示。
SPAD的拟合表达式为

拟合的效果非常理想,2=0.99985。考虑到SPAD是概率意义下的平均输出幅度,式(5)适用cells较大的情况;当SiPM中SPAD单元数很少时,意味着重复试验次数很少,器件的输出与SPAD有一定的偏差。SPAD和死时间以及单位时间内光电子数有关,在一定范围内,死时间或背景光电子数越大,SPAD越大。

2.3 测距系统探测概率



成功探测脉冲信号需要满足这两个条件:
1) 激光回波信号到达前背景光影响的探测器输出没有超过阈值;
2) 激光回波信号输出超过阈值。
条件1)的概率和探测距离有关,在选通时间内噪声信号超过阈值的概率为noise,背景噪声是均匀分布的,因此距离处条件1)的概率:
条件2)的概率为
则成功探测目标距离的概率可表述为


图3 SiPM中SPAD平均输出幅度与死时间内光电子数关系及拟合曲线
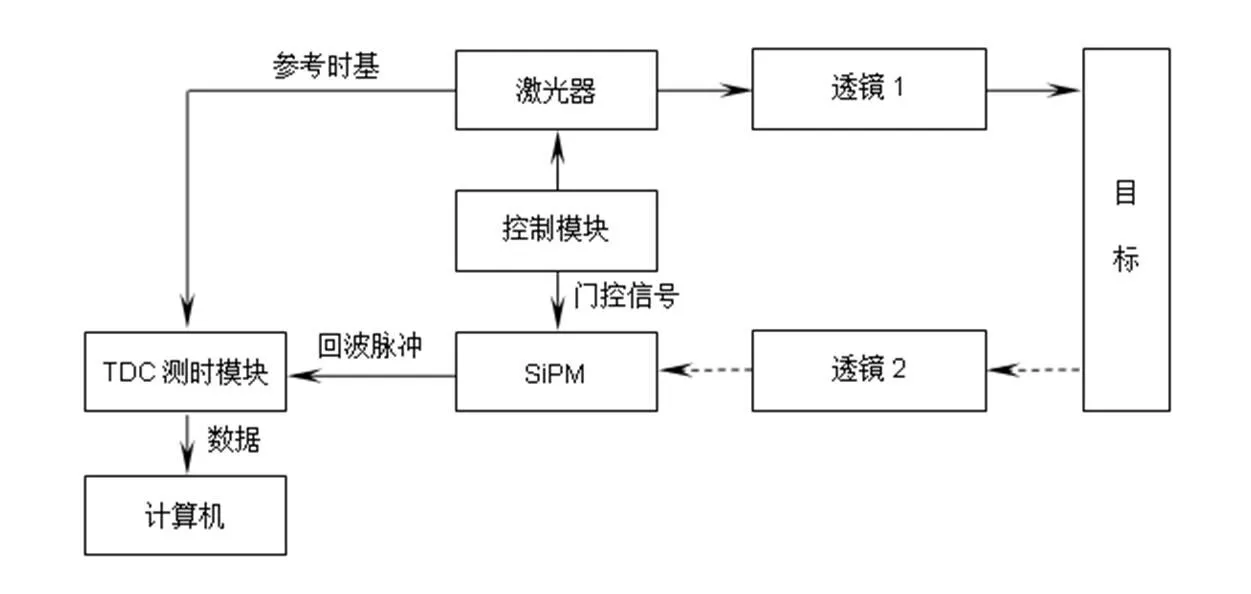
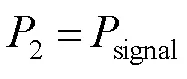
图4 激光雷达测距系统结构图
3 系统性能分析与实验结果
3.1 实验系统搭建与性能分析
为验证上述背景光影响下的激光雷达测距相关理论,设计研制了基于SiPM的激光雷达测距系统,实验系统原理结构如图4所示。
系统工作原理如下:激光器发射的激光脉冲信号先经过透镜1发散照射到目标表面,目标散射回来的激光信号经过透镜2汇聚后被SiPM探测器所接收。激光器发射的初始激光信号和探测器接收到的回波信号输入到TDC测时模块中,计算得到光子飞行时间。控制模块可以调整SiPM的门控时间和阈值,从而调整SiPM的电平输出。

在室外不同的阳光条件下,SiPM的模拟输出情况会有所不同,从而影响整个激光雷达系统的探测概率。图5为在虚警概率10%,目标反射率0.7的条件下,系统在不同背景光水平下的测距探测概率情况。由图5可知,不同的阳光水平对雷达系统测距的探测概率有很大影响,背景光越强,同一距离下探测概率越低。
图5 不同背景光下系统理论测距探测概率
在实际环境中,探测目标表面反射率可能相差很大,目标反射率会直接影响探测器接收到的背景噪声和激光回波信号能量。图6为系统在测距目标表面反射率不同情况下的探测概率-距离分布情况,背景光为50 klux,虚警概率仍然为10%。由图6可见,当反射率超过0.3以后,不同反射率条件下探测概率-距离曲线差别不大,这主要是因为信号和噪声都受到目标反射率影响,但信噪比基本不变。

图6 不同目标反射率下系统理论测距探测概率
3.2 实验结果
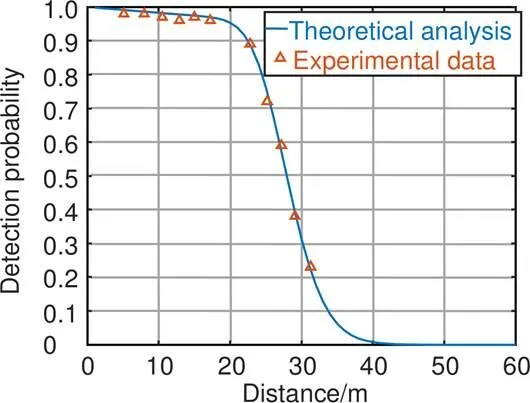
为验证上述基于SiPM的激光雷达探测概率模型,在室外不同阳光条件下进行了激光雷达测距实验。测量目标为远处白墙,反射率0.7,在选通时间为400 ns的条件下调节阈值设置相应的的虚警概率。在不同距离处发射激光脉冲,使用TDC7200EVM测时模块计算光子飞行时间,统计不同距离处探测概率情况。
图7为背景光50 klux,虚警概率10%条件下,不同距离处系统理论探测概率与实验探测概率的对比,7(a)为激光功率1.5 W条件下的探测情况,7(b)为3 W条件下的探测情况。
图8为激光功率1.5 W,虚警概率10%条件下,不同距离处系统理论探测概率与实验探测概率的对比,8(a)为背景光20 klux条件下的探测情况,8(b)为70 klux条件下的探测情况。
图9为激光功率1.5 W,背景光70 klux条件下,不同距离处系统理论探测概率与实验探测概率的对比,9(a)为虚警概率1%条件下的探测情况,9(b)为5%条件下的探测情况。
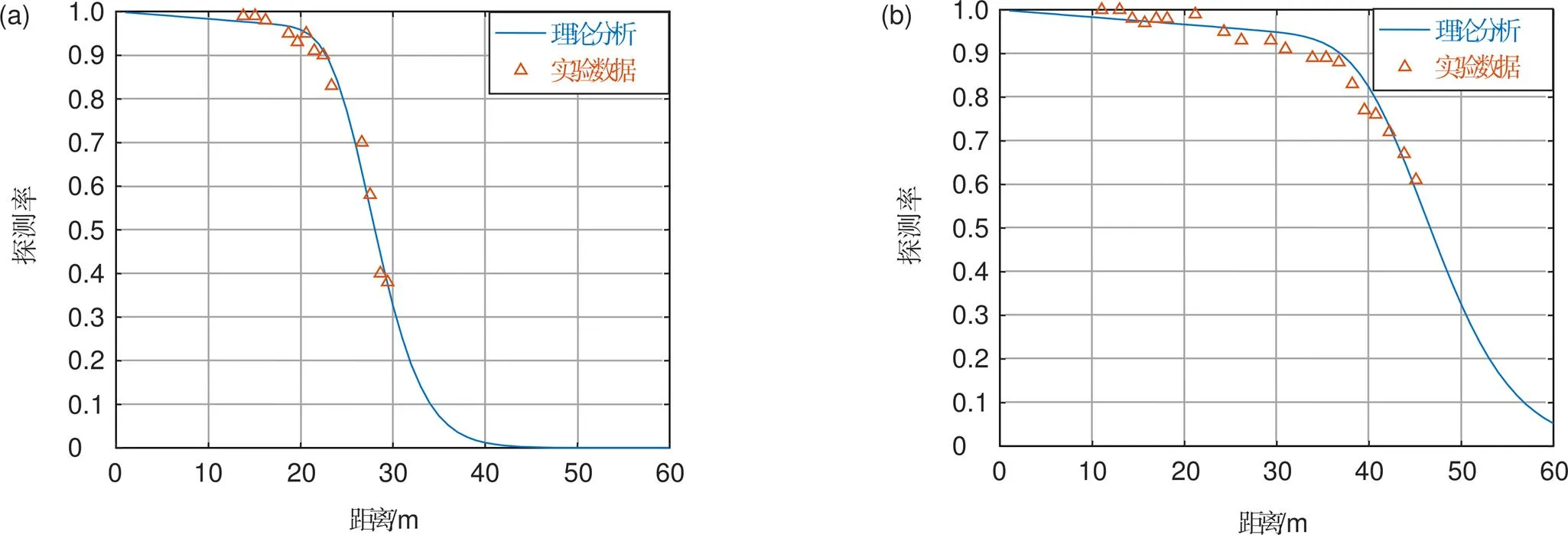
图7 不同激光功率条件下实验结果与理论分析对比。(a) 激光功率1.5 W;(b) 激光功率3 W
由图7、图8、图9中理论分析曲线和实验数据散点可以看出,实验数据与理论分析曲线趋势相一致,不同实验条件下大部分实验数据散点都非常接近理论分析曲线。由于激光光斑能量不均匀性在10%左右,个别散点略有偏差但在误差范围内。实验结果与建立的背景光下基于SiPM的激光雷达测距模型和实验设计参数相吻合,有效验证了相关分析的可靠性。
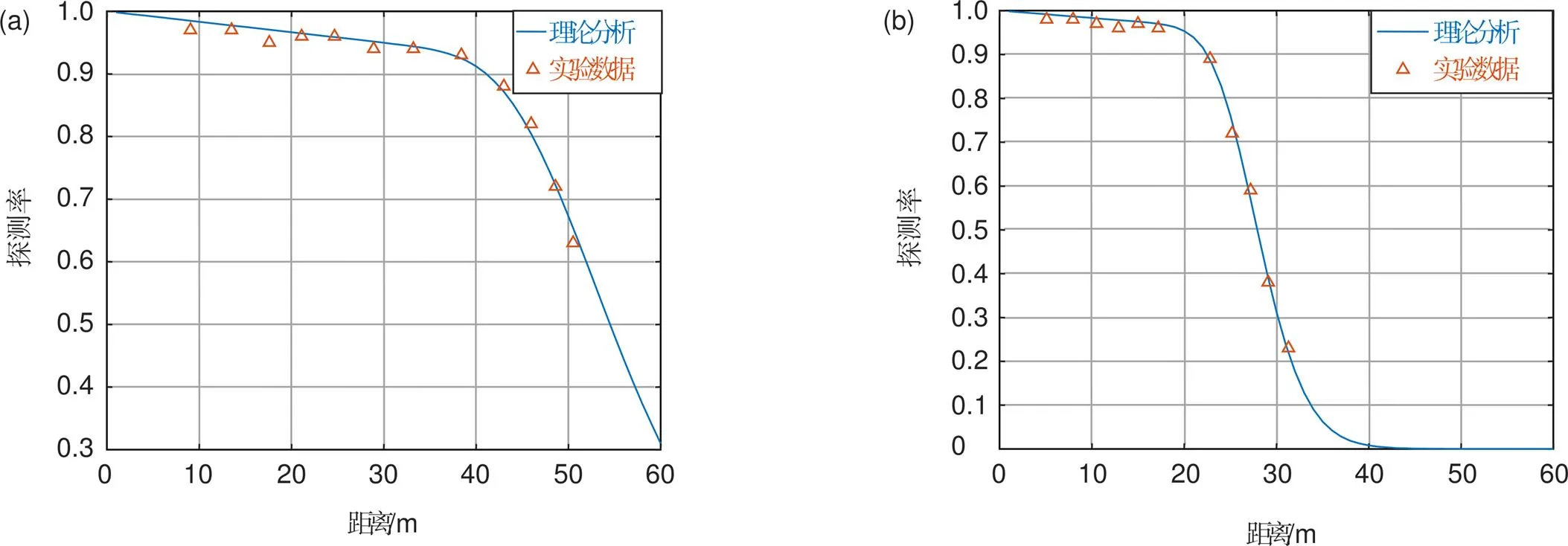
图8 不同背景光强度条件下实验结果与理论分析对比。(a)背景光20 klux;(b) 背景光70 klux
4 结 论
本文主要进行了阳光下基于SiPM的激光雷达探测概率性能分析,首先对背景光下SiPM的模拟输出情况进行了仿真,通过高斯分布拟合得到SiPM模拟输出均值,然后在泊松分布的基础上给出了背景光电子数在0.0001个/ns~0.001个/ns,探测器死时间在5 ns~50 ns范围内背景噪声影响的SiPM模拟输出的计算公式,2达到0.99985,能较准确的反映SiPM输出的真实特性,提高了SiPM输出幅值估计的准确度。接着推导了和环境参数及光学参数相关的探测概率公式,最后搭建了实验平台进行了距离-探测概率关系验证。结果表明在SiPM死时间为35 ns,不同背景光条件下,实验数据结果与系统理论测距结果都能很好的相吻合。

图9 不同虚警概率条件下实验结果与理论分析对比。 (a) 虚警概率1%;(b) 虚警概率5%
[1] Zhang Z J, Zhao Y, Zhang Y,. A real-time noise filtering strategy for photon counting 3D imaging lidar[J]., 2013, 21(8): 9247–9254.
[2] Liu B, Yu Y, Jiang S. Review of advances in LiDAR detection and 3D imaging[J]., 2019, 46(7): 190167.
刘博, 于洋, 姜朔. 激光雷达探测及三维成像研究进展[J]. 光电工程, 2019, 46(7): 190167.
[3] Chen X D, Zhang J C, Pang W S,. Key technology and application algorithm of intelligent driving vehicle LiDAR[J]., 2019, 46(7): 190182.
陈晓冬, 张佳琛, 庞伟凇, 等. 智能驾驶车载激光雷达关键技术与应用算法[J]. 光电工程, 2019, 46(7): 190182.
[4] Chen J Y, Shi Y C. Research progress in solid-state LiDAR[J]., 2019, 46(7): 190218.
陈敬业, 时尧成. 固态激光雷达研究进展[J]. 光电工程, 2019, 46(7): 190218.
[5] Wang J J. Research on high precision laser range finder based on SiPM[D]. Shanghai: University of Chinese Academy of Sciences (Shanghai Institute of Technical Physics of the Chinese Academy of Sciences), 2018.
汪佳佳. 基于SiPM的高精度激光测距技术研究[D]. 上海: 中国科学院大学(中国科学院上海技术物理研究所), 2018.
[6] Hou L B, Huang G H, Kuang Y W,. Research of photon counting laser ranging technology[J]., 2013, 13(18): 5186–5190.
侯利冰, 黄庚华, 况耀武, 等. 光子计数激光测距技术研究[J]. 科学技术与工程, 2013, 13(18): 5186–5190.
[7] Vinogradov S L. Evaluation of performance of silicon photomultipliers in lidar applications[J]., 2017, 10229: 102290L.
[8] Son K T, Lee C C. Multiple-target laser rangefinding receiver using a silicon photomultiplier array[J]., 2010, 59(11): 3005–3011.
[9] Zhang G Q, Liu L N, Zhu C J. Detection and false-alarm probabilities based on multi-pixel photon counter[J].2013, 42(7): 1819–1824.
张国青, 刘丽娜, 朱长军. 采用多像素光子计数器的探测率与虚警率[J]. 红外与激光工程, 2013, 42(7): 1819–1824.
[10] Agishev R, Comerón A, Bach J,. Lidar with SiPM: some capabilities and limitations in real environment[J]., 2013, 49: 86–90.
[11] Mizuno T, Ikeda H, Nagano T,. Three-dimensional Image Sensor with MPPC for Flash LIDAR[J]., 2020, 63(2): 42–49.
[12] Liu H B, Li M, Shu R,. Estimation and verification of high-accuracy laser ranging on several photons[J]., 2019, 48(1): 0106001.
刘鸿彬, 李铭, 舒嵘, 等. 少光子灵敏度精密激光测距方法及验证[J]. 红外与激光工程, 2019, 48(1): 0106001.
[13] Acerbi F, Gundacker S. Understanding and simulating SiPMs[J]., 2019, 926: 16–35.
[14] Grodzicka M, Moszyński M, Szczęśniak T,. Effective dead time of APD cells of SiPM[C]//. 2011: 553–562.
[15] Sima B Y, Chen Q, He W J. Analysis on the deadtime effect of an SPAD[J]., 2012, 38(5): 515–519.
司马博羽, 陈钱, 何伟基. 单光子雪崩二极管的死时间效应分析[J]. 光学技术, 2012, 38(5): 515–519.
Analysis of detection probability performance of SiPM LiDAR under sunlight
Chen Jianguang, Ni Xuxiang, Yuan Bo, Yan Huimin*
School of Optoelectronics Science and Engineering, Zhejiang University, Zhejiang, Hangzhou 310027, China

The experimental results are compared with theoretical analysis under different background light intensities. (a) Background light 20 klux; (b) Background light 70 klux
Overview:LiDAR ranging technology has the advantages of high accuracy, long range, low background interference, and the ability to obtain target distance information in a short time. In recent years, it has been more and more widely used in fields such as autonomous driving and depth imaging. Silicon photomultiplier (SiPM) is an array composed of hundreds or even thousands of single photon avalanche diode (SPADs). It has the advantages of high gain, easy integration into the array, and anti-interference, thus has a wide range of application prospects in LiDAR ranging. In many scenarios, LiDAR ranging will be interfered by background light. In the presence of background light, some SPAD units respond to background photons and remain "quenched" due to the dead time effect. However, other SPAD units are still in a "ready" state, so the detector can still respond to the laser echo signal. At present, part of the analysis of SiPM affected by ambient light is only a qualitative description, and some other part involves formula derivation, but the output amplitude of SPAD in SiPM is regarded as binary, which is different from the real situation of SiPM. For passively quenched SiPM devices, considering the actual situation that the simulation output amplitude of SPAD decays exponentially after excitation, the SiPM simulation output amplitude distribution affected by the background light under the dead time effect is simulated through programming firstly. Then the mean value of SiPM simulation output amplitude is calculated by Gaussian fitting. By analyzing the signal and noise models, the range of photoelectrons excited per nanosecond for each SPAD is estimated to be0.001/ns~ 0.01/ns. On the basis that the probability of excitation of the SPAD received photons obeys the Poisson distribution, the calculation formula of SiPM analog output amplitude affected by background light is given when the background photoelectron is 0.001/ns~0.01/ns and the detector dead time is 5 ns~ 50 ns. Finally, the expression of target detection probability at different distances under the influence of ambient light is deduced. In addition, a radar ranging system is built by using KETEK's PM1125-WB-B0 series SiPM. The threshold was adjusted to set the corresponding false alarm probability within 400 ns of the gating time, and the time when the photons arrived at the detector was recorded through the TI's TDC7200EVM timing module. The experimental results of laser ranging detection probability under outdoor ambient light show that the experimental detection probability results are in good agreement with the theoretical calculation values under various experimental conditions, when the laser power is 1.5 W or 3 W, several parameters of false alarm rate change from 1% to 10%, and several parameters of light intensity change from 10 klux to 70 klux.
Chen J G, Ni X X, Yuan B,Analysis of detection probability performance of SiPM LiDAR under sunlight[J]., 2021, 48(10): 210196; DOI:10.12086/oee.2021.210196
Analysis of detection probability performance of SiPM LiDAR under sunlight
Chen Jianguang, Ni Xuxiang, Yuan Bo, Yan Huimin*
School of Optoelectronics Science and Engineering, Zhejiang University, Zhejiang, Hangzhou 310027, China
Silicon photomultiplier (SiPM) is an array composed of hundreds or even thousands of single photon avalanche diode (SPAD). It has the advantages of high gain, easy integration into the array and anti-interference, and has a wide range of application prospects in LiDAR ranging. We analyzed the laser radar ranging signal and noise model, simulated the output of SiPM under sunlight,and obtained the corresponding mean value through Gaussian fitting. On the basis that the probability of being excited after SPAD
photons obeys the Poisson distribution, the calculation formula of SiPM analog output affected by background light when the background photoelectron is 0.001 /ns~0.01 /ns and the detector dead time is 5 ns~50 ns was given. Finally, we derived the expression of target detection probability. The experimental results of laser ranging detection probability under outdoor ambient light are consistent with theoretical calculations.
SiPM; background light; dead time; laser ranging; probability of detection
the 2016 National Key R&D Program Project "Hand and Whole Body Motion Capture Technology and Equipment Supporting Cloud Integration" (2016YFB1001302)
10.12086/oee.2021.210196
TN364.2
A
* E-mail: yhm@zju.edu.cn
陈建光,倪旭翔,袁波,等. SiPM激光雷达阳光下探测概率性能分析[J]. 光电工程,2021,48(10): 210196
Chen J G, Ni X X, Yuan B, et al. Analysis of detection probability performance of SiPM LiDAR under sunlight[J]. Opto-Electron Eng, 2021, 48(10): 210196
2021-06-09;
2021-09-03基金项目:2016国家重点研发计划课题“支持云端融合的手部和全身运动捕捉技术与设备”(2016YFB1001302)
陈建光(1996-),男,硕士研究生,主要从事基于SiPM的激光雷达测距的研究。E-mail:21830030@zju.edu.cn
严惠民(1961-),男,博士,教授,主要从事光电检测及激光雷达技术的研究。E-mail:yhm@zju.edu.cn
版权所有©2021中国科学院光电技术研究所
猜你喜欢
北京测绘(2022年5期)2022-11-22
材料研究与应用(2022年5期)2022-11-07
汽车观察(2021年8期)2021-09-01
科学(2020年3期)2020-01-06
中国交通信息化(2019年1期)2019-03-26
电子制作(2018年16期)2018-09-26
电子制作(2017年7期)2017-06-05
原子与分子物理学报(2015年3期)2015-11-24
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
太空探索(2014年1期)2014-07-10