载波相位时间差分辅助的SINS/GNSS紧组合导航方法
2021-12-06 03:13王鼎杰
中国惯性技术学报 2021年4期
董 毅,王鼎杰,吴 杰
(1.西安卫星测控中心 宇航动力学国家重点实验室,西安 710043;2.国防科技大学 空天科学学院 空天工程系,长沙 410073)
得益于微机电捷联惯导系统(Micro-Electro-Mechanical System, MEMS)成本低、功耗低、尺寸小、可靠性高等优点,GNSS/MEMS-SINS组合已成功应用于无人机导航、移动测绘、车载导航等领域。目前广泛使用的组合模式为松组合和紧组合。相比松组合,紧组合直接在原始观测信息层面进行数据融合,当卫星颗数少于4颗时仍然可以校正INS的导航误差,显著提高了组合在GNSS受遮挡区域的可用性[1]。
传统紧组合采用伪距和多普勒观测,伪距噪声较大并且受多路径影响严重,使得紧组合位置精度较低。采用载波相位观测值的紧组合可以取得厘米级的定位精度,目前主要由RTK/INS[2–4]和PPP/INS[5–7]紧组合方法。然而,为求解整周模糊度,RTK/INS需要基站的辅助,无法应用于无区域限制的单站实时导航。PPP/INS中整周模糊度收敛时间较长,实时性差。将前后历元的载波相位观测值作差,可以消去整周模糊度参数,构成所谓的载波相位时间差分(Time Differenced Carrier Phase, TDCP)观测量。TDCP观测量已成功应用于GNSS精密速度估计[8]、GNSS/INS组合导航[9]和初始对准[10]中。然而,文献[11]忽略了上个时刻位置误差的影响。文献[12]的TDCP观测方程推导较为复杂,并且现有文献均未考虑引入载波相位后大量观测值紧组合滤波的实时性和可靠性难题。
受文献[9][12]启发,本文提出了一种基于载波相位时间差分的改进MEMS/GNSS紧组合导航方法。推导了简洁的TDCP松、紧组合观测方程,并采用抗差序贯滤波来提高滤波的实时性和可靠性。最后,采用车载试验对比了传统伪距、多普勒辅助紧组合方法和载波相位时间差分辅助松、紧组合方法之间的精度性能差异,验证了载波相位时间差分辅助的性能优势。
1 微惯性/卫星紧组合导航模型
传统微惯性/卫星紧组合导航采用单个中心化Kalman滤波器,直接将GNSS原始观测量(即伪距和多普勒测量值)与SINS进行数据融合。该方法模型涉及惯性导航误差动力学模型、伪距和多普勒紧组合观测模型,下面将对这些模型分别予以阐述。
1.1 微惯导误差动力学模型
在“北东地”当地导航坐标系(n系)下,微惯性导航误差状态方程为[13]:



式中,T和w分别表示一阶高斯-马尔科夫过程的相关时间和驱动白噪声,可依据器件手册或Allan方差分析结果确定;下标a和g分别表示加速度计和陀螺仪。
联立式(1)(2),动力学系统误差状态x及其状态方程为:
式中,F表示系统动力学矩阵,G是噪声系数矩阵,w表示系统过程噪声。对式(4)离散化可得:

式中xk表示k时刻的系统误差状态矢量;Φk,k1-是系统状态转移矩阵,且Φk,k-1=exp(Fk·Δtk) ≈ I+FkΔtk;Γk,k-1是系统噪声驱动矩阵;是(k-1)时刻的系统噪声矢量,满足符号δ表示克罗内克函数。
1.2 传统伪距和多普勒紧组合观测模型
传统紧组合采用伪距和多普勒测量值构造KF观测量。设某一时刻GNSS接收机测量的对应第n号卫星的伪距测量值和多普勒测量值为:





式中,ℓb是SINS中心至GNSS天线相位中心的杆臂矢量(假设导航过程期间保持不变)。将式(9)在SINS估计值处附近离散线性化,可得:

记z为GNSS星间差分伪距、多普勒频移测量值与MEMS-SINS预报值构成的组合导航观测量:

则线性化组合导航观测方程为:

式中,Hk为k时刻的观测设计矩阵;是对应星间差分伪距和多普勒频移的测量噪声。
以上GNSS/SINS紧密组合导航仅采用粗糙的伪距和多普勒测量实现状态估计,尽管实现简单,但是由于伪距噪声较大,组合导航的位置分量噪声较大,不够平滑。另外,无法避免的伪距/多普勒粗差和高精度载波相位信息的缺失也极大地损害了组合导航精度。因此,高精度导航不仅要解决伪距和多普勒测量野值的不良影响,而且要高效利用GNSS载波相位测量进行数据融合,提升组合导航性能。
2 两种载波相位时间差分辅助模式
为进一步优化传统紧组合导航方法性能,本节利用TDCP观测量在线辅助MEMS-SINS,在无需解算模糊度的条件下改善单站组合导航信息融合质量、提升MEMS误差在线校准精度。本节将对两种载波相位时间差分辅助策略进行建模和分析,并由此分别构建两种组合策略的Kalman滤波器测量方程。
2.1 载波相位时间差分模型
第n号可见卫星的载波相位观测方程为:

式中,φ(n)表示该观测时刻第n颗可见卫星载波相位测量值;λ是载波波长;I(n)和T(n)分别对应第n颗卫星的电离层和对流层延时;δt(n)表示卫星时钟钟差;δtu表示未知接收机钟差;表示载波相位测量随机误差;未知整数N表示对应于第n颗卫星载波相位的整周模糊度,在无卫星信号遮挡或不发生周跳条件下,将保持常数。在单站模式下实时、准确求解整周模糊度是极其困难的。
然而,假如载波相位不发生周跳,相邻两个历元载波相位观测值差分可以消去式(13)中未知整数N,获得无模糊度的精确载波相位时间差分观测值(TDCP),巧妙避免了整周模糊度固定难题。相邻两个GNSS测量历元tk-1和tk,载波相位测量值、卫星位置及接收机位置的几何关系如图1所示,则构造相邻时刻tk-1和tk的TDCP观测量为:
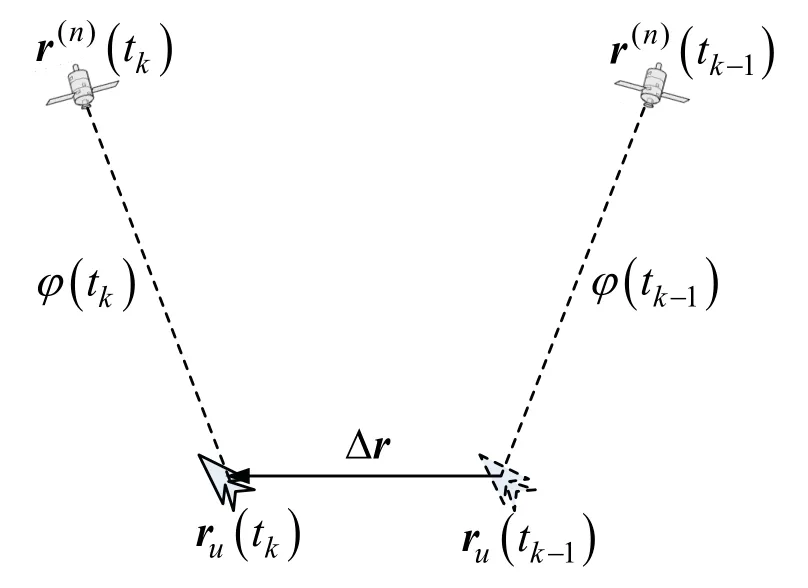
图1 相邻两个GNSS测量历元的载波相位测量值Fig.1 The carrier phase observations at two epochs tk-1 and tk.

式中,Δδtu表示相邻时刻接收机钟差之差;为随机误差,其协方差是原载波相位测量随机误差的2倍;表示相邻时刻间GNSS天线相位中心至第n颗卫星的距离变化量,即

式中,Δr表示载体在时间间隔[tk-1,tk]内的位移向量;式(15)右边第一项和第二项可由导航电文和GNSS单点定位结果计算获得,均是已知量,可记为:


选定具有最大高度角的r号星作为参考星,对n号星TDCP观测量实施星间差分可消去式(18)中的接收机钟差项c· Δδtu,对应的星间差分观测量为:

2.2 基于载波相位时间差分解算的精密位置增量辅助
直接联立tk时刻的如式(19)所示载波相位时间差分观测方程,采用最小二乘法求解获得[tk-1,tk]时间内的高精度位置增量Δr。这种高精度位置增量解算方法称为PDOT技术,常用作外推运动载体位置的一种有效手段。联立tk时刻所有可用卫星载波相位时间星间差分观测方程,可得:
写成矩阵形式为


式(22)成立条件是观测量维数m≥3,即可用卫星数不少于4颗。试验表明,由载波相位时间星间差分解算的位置增量在静态条件下达到了毫米量级精度[1]。
根据载体位置的几何关系可以构造如图2所示的向量三角形。和分别表示tk-1和tk时刻的载体位置真值;表示tk-1时刻测量更新修正后的载体位置估计值,表示tk时刻的位置预报值,两者对应的位置误差分别记为δrk-1和δkr;表示从tk-1到tk载体的位置增量估计值,鉴于由PDOT获取历元间位置增量的高精度,可近似为位置增量真值则:
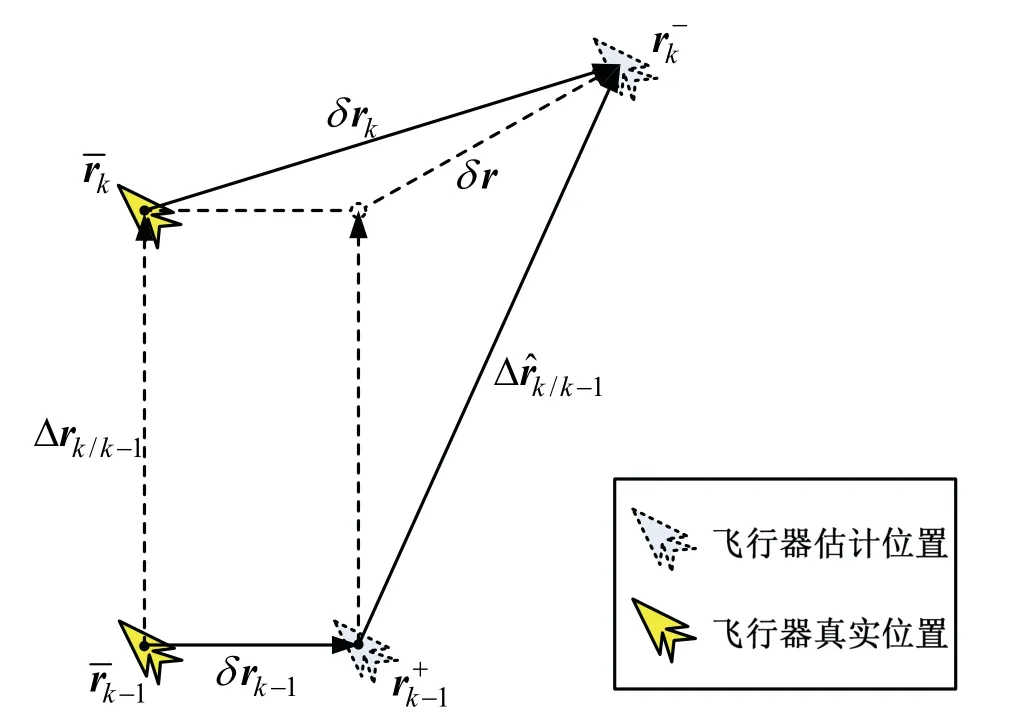
图2 历元间位置增量与位置误差状态之间几何关系Fig.2 The geometry between time-differenced position increments and position error vectors

考虑到PDOT解算位置增量 Δrk/k-1存在随机误差则


这里先高速解算时间更新周期的“小间隔”状态转移矩阵,再把“小间隔”转移矩阵累乘获得对应测量更新周期内的“大间隔”状态转移矩阵Φk,k-1。
矩阵形式为:

式(25)(26)中 ,Cr=[I3×303×12];是位置增量测量噪声;是观测设计矩阵。式(26)即为基于载波相位时间差分解算精密位置增量的拟紧组合观测模型。这里称“拟紧”一方面是与直接采用载波相位时间差分测量进行的完全紧组合方案(简称为“全紧”)相区别。
2.3 基于载波相位时间差分观测量辅助
不同于上述精密位置增量辅助策略,这里推导直接使用载波相位历元间星间差分测量的惯性/卫星紧组合方案观测模型。将式(19)写为[tk-1,tk]内速度积分,则



令Cv=[03×3I3×303×9],Cφ=[03×6I3×303×6],则:

式中,tδ是 IMU 采样时间(通常很小);是相邻两个GNSS测量时刻tk-1和tk之间的IMU采样数据个数;Fk是k时刻的系统矩阵。
由此获得直接采用载波相位历元间星间差分观测值的Kalman滤波测量方程:

或矩阵形式:

式(32)即为直接建立载波相位历元间星间差分观测模型的完全紧组合方案(称为全紧组合)。
2.4 抗差序贯滤波
抗差序贯滤波的时间更新步与传统的卡尔曼滤波相同:
假设在当前k时刻包含伪距、多普勒和载波相位时间差分共有m个观测值,观测向量zk、观测矩阵Hk和观测噪声方差阵Rk记为

抗差序贯滤波的测量更新步中,依次处理上述m个观测值:

初值为时间更新后的误差状态量和协方差阵:

为了探测并处理GNSS观测值中的野值,设计了基于新息检验的抗差估计方法。式(35)中滤波的新息和对应方差为
其中,为新息,为对应的方差,为经过i-1次测量更新后的系统误差状态估计值。在当前观测值无故障的前提下,新息服从零均值的正态分布。因此,可采用假设检验方法来探测GNSS故障观测值。设计检验统计量为

易知t服从标准正态分布,对应的零假设和备择假设为


当探测到故障观测值后,设计如下的膨胀因子对新息的方差进行膨胀:
其中κ为膨胀因子。采用膨胀后的方差参与后续的测量更新,可以克服故障观测值的影响。
本小节的抗差序贯滤波算法在处理大量观测信息时不仅能提高实时计算效率,而且能探测并处理单一通道的GNSS故障观测值。但是,该方法对于缓变故障检测能力不强。
2.5 周跳探测
鉴于组合导航滤波收敛后,基于新息的上述抗差序贯滤波算法能有效探测和处理故障,因此在组合导航(重新)初始化时,我们采用TurboEdit方法[14]对载波相位周跳异常进行探测。编号为n的卫星GF和MW观测值为
式中,λ1和λ2为双频的波长,f1和f2对应的频率,和为该卫星两个频点对应的模糊度。MW组合消去了了几何距离、接收机和卫星钟差、大气延迟的影响,仅与宽巷模糊度有关。GF组合观测值不受钟差、对流层延迟和卫星构型的影响,仅受电离层误差影响。由于伪距噪声较大,MW组合适合探测较大的周跳。载波相位噪声较小,在相邻历元电离层变化平稳的条件下,可以探测较小的周跳。
3 实验验证与结果分析
为了验证本文所提方法,基于GNSS和MEMS-SINS传感器的嵌入式导航系统被搭建起来,如图3所示。为了定量评估所提算法,将所提算法运行于紧组合导航原理样机,并基于该样机系统在实际城市环境开展车载动态试验。试验期间除样机系统安装在试验车顶部钢板输出并记录实时导航结果外,同时还采用另一套独立的高精度激光陀螺位姿参考系统(武汉迈普时空,型号MP-POS830)提供导航参考基准。另外,需在试验场地附近开阔地点临时搭建GNSS静态基准站,如图4所示,以提供事后处理模式下的高精度的RTS平滑RTK/SINS紧组合结果作为导航参照基准,用于评估当所提方法用于MEMS-SINS时的性能和有效性。样机系统核心部件MEMS IMU的性能参数和POS830系统性能参数如表1和2所示。
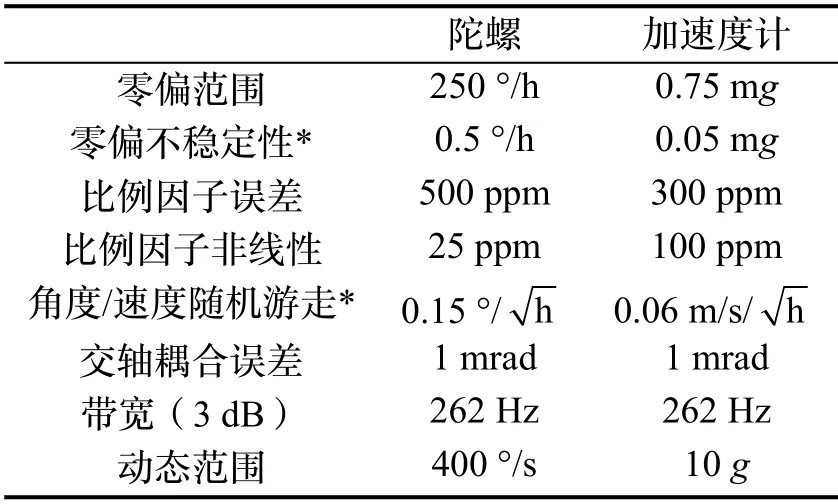
表1 MEMS惯性测量单元STIM300(挪威Sensonor)性能参数Tab.1 Performance parameters for STIM-300 MEMS-IMU

图3 运行所提紧组合算法的嵌入式样机系统Fig.3 The prototype system running the proposed TC algorithm

图4 车载导航试验系统示意图Fig.4 Equipment in the field test
车载试验地点选在武汉市江夏区较为开阔、无GNSS遮挡的地区进行,整个试验的时间跨度约为1小时,车速最高达到62 km/h。初始位置为(30.407 °N,114.282 °E,20.985 m),GNSS卫星截止高度角设置为10 °,以确保1 Hz更新率的GNSS观测信号质量。对系统及算法性能评估的重点在于GNSS信号恶化和遮挡情形,这些情形可以通过SINS对准后每隔60秒人为引入60秒GNSS中断而近似模拟。连续GNSS辅助和模拟长时间GNSS中断两种情形均被用于验证所提方法用于MEMS-SINS时的有效性。
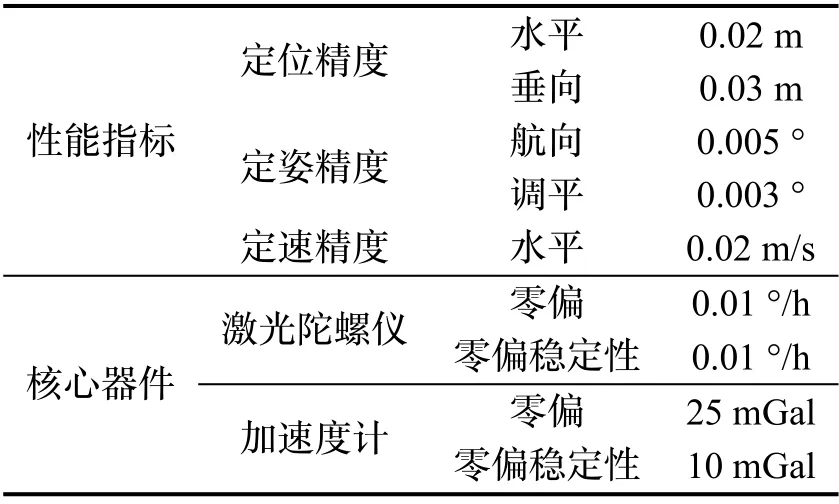
表2 MP-POS830主要技术参数Tab.2 MP-POS830 performance parameters
3.1 所提方法与传统紧组合方法的精度对比
本节基于车载动态试验考察采用所提载波相位时间差分辅助紧组合方案对导航精度的影响,通过分析和比较传统紧组合方法和载波相位时间差分辅助紧组合方法之间的精度性能差异,验证所提算法性能优势。
在图5中,蓝色实线标识为“传统紧组合”,该曲线表示采用GNSS伪距和多普勒观测的传统紧组合方法所得导航误差结果;绿色点线标识为“拟紧组合”,该曲线表示由基于载波相位时间差分解算的精密位置增量(PDOT)辅助紧组合方法所得结果;而红色点划线标识为“全紧组合”,表示由GNSS伪距、多普勒和载波相位时间差分观测与MEMS-SINS直接紧组合方法获得的导航误差。

图5 良好GNSS观测环境下动态试验组合方案导航误差对比Fig.5 Error comparison among different TC approaches with the field test under benign GNSS environment
对这三种方法的导航误差做均方根误差分析,如表3所示。从图5可以看出,引入载波相位时间差分信息的两种紧组合方法使得传统紧组合方案的速度和姿态精度得到显著改善,定位误差更加平滑。相对于传统紧组合算法,全紧组合方法将三维位置、速度和姿态的最大估计误差分别从4.5920 m、0.2251 m/s、0.4968 °缩减至3.2802 m、0.1775 m/s、0.2861°,精度分别提升了28.57%、21.15%、42.41%。相对于拟紧组合算法,全紧组合方法将三维速度和姿态的最大估计误差分别从3.5440 m、0.2283 m/s、0.4988 °缩减至3.2802 m、0.1775 m/s、0.2861°,精度分别提升了7.44%、22.25%、42.64%。这一结果验证了载波相位时间差分信息提升传统GNSS/MEMS-SINS紧组合精度(尤其是采用全紧组合方法)的优势。
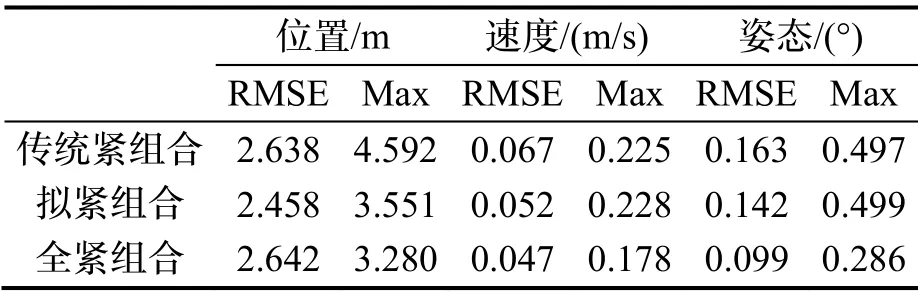
表3 良好GNSS观测环境下车载动态试验组合导航精度对比Tab.3 Accuracy comparison between different TC approaches with the field test under benign GNSS environment
3.2 长时间GNSS中断条件下的导航性能对比
本小节着重分析在较长时间GNSS中断条件下,不同紧组合导航方法所表现出的性能差异,从而揭示出载波相位时间差分观测在提升紧组合导航系统精度上的深层次原因。
图6反映了在GNSS中断60秒期间的组合方法均出现随时间发散的较大导航误差,其最大误差如表4所示。相比于传统紧组合方法,载波相位时间差分信息的引入抑制了GNSS中断期间的组合导航误差发散。具体而言,相对于传统紧组合,拟紧组合算法将最大定位、定速和定姿误差分别减少了约7.46%(从28.889 m到26.733 m)、18.10%(从1.033 m/s到0.846 m/s)和最大姿态误差约4.84%(从0.682 °到0.649 °);而全紧组合算法将最大定位、定速和定姿误差分别减少了约46.37%(从28.889 m到15.492 m)、39.69%(从1.033 m/s到0.623 m/s)和最大姿态误差约50.88%(从0.682 °到0.335 °)。这一结果表明了所提全紧组合方法在综合导航性能上的显著优势。

表4 模拟GNSS恶劣观测环境下动态试验组合导航精度对比Tab.4 Accuracy comparison between different TC approaches with the field test in adverse GNSS condition

图6 模拟GNSS恶劣观测环境下动态试验组合导航误差对比Fig.6 Error comparison among different TC approaches with the field test under simulated adverse GNSS condition
通过将表3和表4对比分析可知,在基于伪距、多普勒频移和载波相位时间差分的全紧组合方案中,由于引入了高精度、无模糊度的载波相位时间差分测量对捷联惯导系统进行在线校正,实现了更加优良的速度、姿态误差补偿和惯性器件零偏标定,由此带来了显著的速度和姿态精度提升。车载试验结果表明,在不增添其他传感器或GNSS基准站的条件下,基于载波相位时间差分辅助的GNSS/MEMS-SINS全紧组合方法能够显著提升传统惯性/卫星组合导航精度。
4 结 论
针对传统GNSS/MEMS-SINS紧组合在GNSS中断期间导航误差随时间急剧恶化的问题,本文提出了一种基于载波相位时间差分观测信息辅助的微惯性/卫星紧组合导航方法。该方法在有效利用高精度GNSS载波相位观测信息改善微惯性导航误差在线校准精度的同时,避免了无GNSS基准站辅助条件下实时求解整周模糊度的难题。采用抗差序贯卡尔曼滤波器将GNSS伪距、多普勒和载波相位时间差分信息进行可靠的数据融合,提高组合导航信息融合精度,从而保证了GNSS中断时MEMS-SINS的良好初始对准精度。车载试验结果表明,基于伪距、多普勒频移和载波相位时间差分观测量的GNSS/MEMS-SINS全紧组合方法能够在不增加额外传感器或GNSS基准站的条件下显著提升传统紧组合导航性能。在相对较长时间(如60秒)GNSS中断期间,该方法能够显著提升位置、速度和姿态精度达46%、40%和51%。
猜你喜欢
数学杂志(2022年5期)2022-12-02
新世纪智能(数学备考)(2021年5期)2021-07-28
测绘科学与工程(2017年3期)2017-08-16
测绘通报(2016年12期)2017-01-06
西部广播电视(2015年10期)2016-01-18
导航定位学报(2015年2期)2015-06-05
信息安全研究(2015年3期)2015-02-28
太空探索(2014年1期)2014-07-10
电测与仪表(2014年15期)2014-04-04
华东理工大学学报(自然科学版)(2014年2期)2014-02-27