
架空乘人装置的工作原理及制动性能检测
2021-12-06 07:03张铎
采矿技术 2021年6期
张铎
(太原市宏宇煤炭技术咨询有限公司, 山西 太原 030000)
架空乘人装置在矿业开采产业中的运用程度非常高,装置的主要作用是运输物资和作业人员,设备自身的安全性会直接关乎到作业人员的人身安全,而架空乘人装置的整体性能也会对设备的安全性造成显著的影响。
1 h8729型架空乘人装置工作原理及优点
1.1 工作原理
近年来,我国煤矿行业频频爆发安全事件,促使矿井作业环境下的斜井人车被列入了重大安全隐患范围以内[1]。因此,架空乘人装置应运而生。这种设备单次输送规模较大,整体性能比较稳定,安全性也较高。且架空乘人装置的生产成本非常低,操作性不强,后期维护非常的便捷。乘人装置的驱动系统结构简单,主要是由液压制动器、冷却系统、电动机、控制阀、仪表盘、油箱、控制系统等组件所共同构成。驱动系统中的油泵属于是一种双向柱塞泵,当该装置的油泵处于未运行的状态下,斜盘就应该位于中间位置;当电动机处于运行状态时,但电磁阀却未通电,马达则会因为油泵缺少输出而停止转动,相应的钢丝绳则不会进行工作,属于空载作业。当电磁阀其中一边的端口通电时,斜盘则会呈现出倾斜的现象,此时,油泵会输出压力促使马达进行工作。马达的转速可以通过改变油泵中液压油的流量来控制。其中马达的转速特征与电压的波动特点之间存在紧密的关联性。假若电磁阀的另一个端口通电时,斜盘会倾向于另一个方向移动,那么油泵输油的方向会发生变化,马达转动的方向也会发生相应的变化。考虑到马达与油泵存在泄露问题,应该及时给这两个组件补充液压油,保证设备能够稳定地运行。
自动化控制系统主要是展现出以下几方面的保护功能:速度保护、急停保护、限位保护、过位保护等。以急停保护中的全程急停而言,该控制系统以48 m为一个间隔,在设备中装置急停开关。当通道中出现紧急情况以后,在通道内的任何一个节点都可以自动实现停止运行,同时系统还会发出警报。自动化控制系统中的任意一个保护功能促发都会在显示屏中显示出相应的故障信息,且发出故障警报,同时系统也会立刻停止运行,只有在故障解决、系统复位以后,整个系统才能再次进行运转。
1.2 优点
h8729型架空乘人装置是一种先进的矿山移动设备,具有以下优点:单次输送规模较大,整体性能比较稳定,且设备的安全性也显著提升,生产成本低,操作性强,后期维护便捷。
借助液压驱动设备可以高效地实现无极变速[2]、多向转动的功能,对检测钢丝绳的安全性能有巨大的促进作用;电动机能够空载启动,促使电动机及其他组件的使用周期得到适当的延长;车速控制功能可以有效地提高设备乘坐的舒适感;液压系统的重量较轻,便于后期维护;设备抗污染能力比较强,能够在恶劣环境下作业。
与传统型设备相对比,h8729型架空乘人装置的整体性能更稳定,出现故障的频率非常低,不但经济且设备的寿命周期还比较长,最重要的是h8729型架空乘人装置中的通讯组件与电气组件之间不会产生相互影响。传统型的移动设备主要不足有:(1)无法有效地实现空载运行,促使设备的使用寿命降低,对各种组件的磨损较大;(2)设备自身的性能不稳定,各种元器件出现故障的频率较高;(3)生产成本比较高;(4)电气组件与通讯组件的影响性非常大。
2 制动性能检测
2.1 制动系统介绍
h8729型架空乘人装置细分为3种不同的类型:(1)气动制动款式;(2)电液制动器制动款式;(3)液压站制动款式。现阶段,实际作业过程中使用频率较高的主要是后两种。该设备的制动系统结构简单,主要是安全轮制动器与工作制动器。其中,工作制动器是装置在联轴器上,而安全轮制动器则是装置在制动盘中。由于安全轮制动器是直接对驱动力输出动力,因此其安全性较高,能够有效地避免因突发状况而引发的安全事故。
2.2 性能检测工具及系统配置
2.2.1 性能检测工具
通常情况下,架空乘人装置的监测仪器主要是由手动葫芦、U状环、抓手、绳套等组成[3]。当开挖深刻超过1 m的情况下,横梁应该使用贯通式安装,这种安装方式的施工量比较大,但是安装后非常结实,不会出现松动现象;使用组合梁方式施工量大幅度减少,但是组合梁的整体外观不美观;使用锚杆安装方式,施工的难度比较小,焊接比较地方便。
2.2.2 系统配置
(1)以实践情况来看,大部分场景下都是使用四象变频方式进行控制,设备的运动速度一般保持在 0~2.5 m。
(2)托绳一般都是使用工字钢进行紧固,钢丝绳的间距应该控制在1200 m。
(3)在设备的头端与末端都分别设有站点,且在通道结点中还设有站点,以便于上下站。在每一个站点都分别设有相应的限位设备,为确保人员安全,在托架上安装有吊椅避免设备摆动。
(4)在通道沿线每隔 50 m 设置1个紧急开关,用于紧急停车使用。
(5)在设备微端设置有限位保护装置,能够有效地起到保护作用。
2.3 制动性能检测
2.3.1 制动性能检测方法
方法一:沿着钢丝绳运动的方向,选择长5 m的钢丝绳套子,套子的一端与钢丝绳爪子、钢丝绳连接,另一端则与驱动轮、U型环进行连接。而监测设备则应该与葫芦进行连接,连接点应该确定在固定点,监测装置与检测仪进行连接,将钢丝绳紧固,直至制动器打滑位置,而后读取监测设备中的读数,如图1所示。

图1 方法一原理
方法二:沿着钢丝绳移动的方向,选择一个长度为5 m的钢丝绳套[4]。绳套的一端与牵引绳子连接,另一端与U型环进行连接。而监测设备则与葫芦进行连接,连接点确定在固定点,监测装置与检测仪连接,将钢丝绳紧固,直至制动器打滑位置,再读取监测设备中的读数,如图2所示。
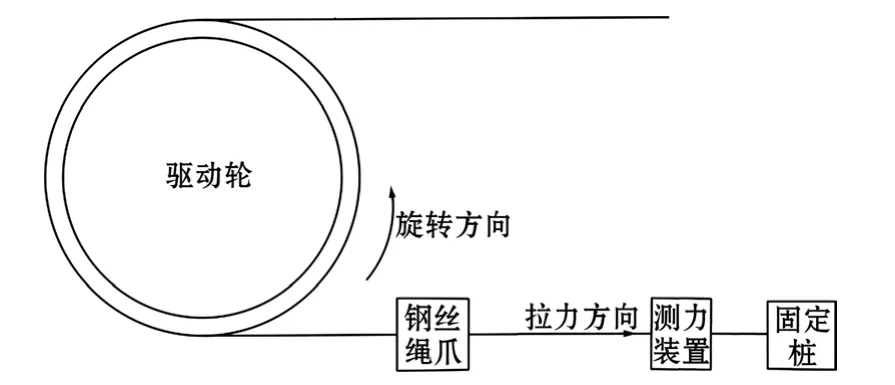
图2 方法二原理
对比以上两种监测方法,前一种方法在实操方面的难度相对较大,但是最终监测的结果更为精准,而后一种方法操作性强,但是最终监测的结果不是很精准。
2.3.2 平均减速度的检测与计算
将存储记录仪与监测设备连接,将电动机的轮子与钢丝绳连接,当乘人装置负重下行或是空车上行时,利用钢丝绳来牵引电动机运行,促使电动机能够形成一个信号。此时,记录仪所记录的数据曲线应该呈现出一条平直的线条。同时,利用转速表获取到钢丝绳移动的速度,当钢丝绳的移动速度与电压曲线处于稳定状态时,应该立即启动制动器,直至乘人设备停止运行。此时,所采集到的电压应该为零,电压下降的时间间隔就是设备的制动时间。
3 架空乘人装置的应用
电控系统由电源箱、信号检测组件、控制线路、PLC提升信号设备以及控制组件组成。乘人装置的控制系统大致可以细分为3种情况:(1)连续性控制;(2)断续性控制;(3)检修性控制[5]。详细介绍如下:
选择使用连续性控制,控制系统会全天持续性运转,一般使用在矿场人流量比较大的场景中。假若使用无人值守模式,当控制系统检测到乘人设备中有人或是物资以后,检测系统会借助传感器来启动控制信号。此时,系统就根据正常状态下的模式来控制乘人装置,实现无人值守开车模式。
断续性运行模式相对而言更为节能,能够有效地避免电力资源浪费。通过设置合理的间隔事件,促使乘人装置定时运行,实现将乘坐人员从起点运输至终点,当乘人装置达到终点以后会自动延时十秒钟停机。当开启控制系统中的计时器以后,传感器在检测到人员进入到乘人装置后的信号后,计时器会归零重新进行计时,当剩余时间显示为零以后,控制系统将会自动停机且不会再次运行。
4 结语
在研究过程中,必须要严格按照《架空乘人装置安全检验规范》中所提到的各种规范要求。本文对系统的最大制动力、制动减速问题着重地进行了分析,结合乘人装置的结构差异,设计出了不同的检测仪器的安装方法,对乘人装置的制动力以及减速内容进行了分析。虽然现阶段架空乘人装置并未得到广泛的应用,但是结合国内部分煤矿作业的实践情况来看,该装置在技术层面已经发展成熟,可用于煤矿环境下作业。煤矿开采工人在经过一天的疲惫作业后,乘坐架空装置能够有效地降低他们的疲劳度。目前,架空乘人装置得到了业内人士的高度好评,随着科学技术不断的发展,架空乘人装置将会有广泛的应用价值。
猜你喜欢
机械管理开发(2022年3期)2022-05-14
机电信息(2022年9期)2022-05-07
当代作家(2021年10期)2021-11-09
探索科学(学术版)(2021年5期)2021-06-10
作文小学高年级(2020年11期)2020-12-29
水电站机电技术(2019年11期)2019-12-02
中国特种设备安全(2019年3期)2019-04-22
水电站机电技术(2018年2期)2018-03-05
中国设备工程(2017年15期)2017-01-20
广东技术师范大学学报(2016年5期)2016-08-22
