基于风险的超高层施工钢平台疏散模型及应用
2021-12-06 06:27赵金城邹杰新张菁菁阮诗鹏
上海交通大学学报 2021年11期
华 莹,何 军,赵金城,邹杰新,张菁菁,阮诗鹏
(上海交通大学 土木工程系;上海市公共建筑和基础设施数字化运维重点实验室,上海 200240)
超高层建筑广泛采用复杂多变的框架-核心筒结构形式,施工过程中对模架装备要求极高.上海建工集团自主研发的钢柱筒架交替支撑式液压爬升整体钢平台模架体系,在上海中心大厦、白玉兰广场、静安大中里及南京金鹰天地广场等项目中取得了良好的应用效果[1].
目前已有对整体钢平台体系的施工技术、结构性能等的研究.骆艳斌等[2]考虑建筑结构刚度的不确定性,对超高层建筑整体钢平台模板体系的风振响应区间进行了分析.徐伟等[3]假定结构响应为泊松分布,对整体钢平台模板体系的动力可靠度做了区间估计.龚剑等[4]对上海中心大厦采用的筒架支撑式液压爬升整体钢平台模架体系的设计和施工技术进行了详细介绍.Yang等[5]基于上海中心大厦整体钢平台体系的有限元模型,对风荷载作用的力学响应做了分析.王玄玄等[6]开发Revit-Abaqus模型转换接口对超高层建筑施工整体钢平台进行了三维建模和结构分析.
实际上除了钢平台体系本身的结构安全,超高空作业、工序穿插、上下立体交叉作业形成的复杂施工环境,给施工人员带来了高度的风险,因而施工人员的安全也面临着巨大的管理难度.但是,针对施工现场人员安全疏散管理的研究还很薄弱.Said等[7]基于智能体的模拟框架分析了建筑施工人员的紧急疏散问题.Meouche等[8]开发了一种空间风险模型生成最小风险的施工人员疏散路径.Kim等[9]基于4维建筑信息模型(BIM)提出一个框架,根据不断变化的施工现场自动生成每天的疏散路径.Hua等[10]提出了考虑风险区域影响的施工现场人员疏散分析方法,实现了定量风险评估和人员疏散模拟的结合.然而尚无超高层建筑施工钢平台体系的人员疏散问题的研究.
因此,有必要对钢平台体系中的风险和施工人员疏散过程展开研究,分析复杂施工环境中人员紧急疏散的过程和规律.本文提出一种考虑危险区域风险随机性的超高层建筑施工钢平台人员疏散模型,通过危险区域划分及风险联合概率评估,建立基于风险概率的元胞自动机疏散模型,并应用于某超高层建筑施工项目中.
1 考虑风险随机性的超高层建筑施工钢平台人员疏散模型
工程项目具有高度的不确定性,即随机性、模糊性及未确知性.随机性是指事件是否出现的不确定性,原因在于发生条件的不充分.模糊性是指事件概念的不确定性,原因在于难以划分明确的界限判定一个对象是否符合这个概念.未确知性是指信息或数据的不完整而造成的不确定性[11].本文认为尽管工程项目复杂又多样,但危险事件的发生具有概率性,因此可以构造随机数学模型来描述.
为解决超高层建筑施工钢平台体系风险的量化问题以及施工危险区域对人员疏散的影响评估问题,提出一种考虑风险随机性的施工钢平台人员疏散模型.基于多维变量联合分布和元胞自动机理论,分为3个模块(见图1):① 施工图纸预处理模块——创建预处理程序,将传统施工图纸数字化;② 风险评估模块——采用多维变量联合概率分布,对危险区域的风险性进行概率评估[12];③ 人员疏散模块——考虑钢平台体系危险区域的风险概率,建立元胞自动机仿真模型.
1.1 施工图纸预处理模块
定义钢平台体系的危险区域并在施工图纸中进行区域标注,预处理程序输出包含危险区域信息的网格坐标,用于建立人员疏散的元胞自动机模型.模块工作分为3个部分:
(1)危险区域标注——在施工CAD图纸中划分危险区域,并用色块进行标注,输出长宽像素点分别对应图纸尺寸及可识别RGB的PNG格式图片文件.
(2)危险区域识别——每40像素×40像素点压缩为1像素×1像素点,目的是与元胞自动机模型网格(网格大小为40 cm×40 cm的四边形)对应;遍历每40像素×40像素点的RGB值,取占比最大的赋值给压缩像素点,输出对应元胞自动机模型网格的像素点压缩PNG格式图片文件.
(3)网格划分——将像素点压缩后的PNG格式图片作为处理对象,设置字典记录色块的像素点坐标集合,将字典的keys形成列表方便访问,同一色块的所有像素点坐标返回至一个列表中,列表的索引即为网格的编号,输出包含危险区域坐标信息的CSV文件,可直接用于建立元胞自动机模型网格.
1.2 风险评估模块
1.2.1多维变量联合概率 将钢平台危险区域的风险性作为随机变量,取任意分布X=[X1X2…Xn].基于Normal Copula联合分布模型[13](即Nataf模型[14]),利用边缘分布和相关系数矩阵将多维非正态变量转换为标准独立正态变量进行处理.X与标准正态随机向量Z=[Z1Z2…Zn]的关系为
Zi=Φ-1[FXi(xi)],i=1,2,…,n
(1)
式中:FXi(·)为累积分布函数;Φ-1(·)为逆标准正态累积分布函数.采用等概率转换原则,随机向量X的联合概率密度函数(PDF)和联合概率分布函数(CDF)分别为[14]
fX(x)=fX1(x1)fX2(x2)…fXn(xn)×
(2)
FX(x)=Φn(z,R′)
(3)
式中:fXi(·)为Xi的PDF;φ(·)为标准正态分布的PDF;φn(z,R′)和Φn(z,R′)分别为相关矩阵为R′的n维标准正态分布的PDF和CDF.
本文将危险区域的风险性作为随机变量,风险因素法得出的相关系数矩阵近似为变量间的相关结构,已知多维变量的联合分布,可得到简化的高斯随机场处于状态f的概率为
(4)
式中:b=[b1b2…bn]为变量界限值;状态f指代各个危险区域对应的分布特征.
1.2.2边缘分布估计 对钢平台施工现场划分定义危险区域,采用作业条件危险性评价法进行各危险区域风险性的边缘分布估计:风险性分值D主要由事故发生的可能性L、人体暴露于危险环境的频度E及发生事故后果的严重度C决定,即
D=LEC
(5)
L、E及C的值来源于专家调研.基于概率论中心极限定理,对于本文研究的工程问题,可假定 lnD服从正态分布[15],即lnD~N(μ,σ2)(μ为期望,σ2为方差),则可得风险边缘分布的概率密度函数及累积分布函数.
1.2.3相关性分析 施工现场大量的风险因素是导致危险源或风险事件发生的根本原因.将危险区域的风险性作为随机变量X,通过事故树分析法可以识别各自的风险因素.《福建省建设工程施工重大危险源辨识与监控技术规程》[16]给出了工程项目风险评价的指标因素集,即以下6个方面:① 作业人员U1(包括劳务企业资质u11、作业人员技能u12、作业人员安全意识u13、特种人员持证上岗u14及作业人员身体状况u15).② 机械设备U2(包括机械设备性能u21、机械设备安装及拆除u22、机械设备临时用电u23、特种设备检测及验收u24及机械设备维修保养u25).③ 材料U3(包括材料合格证u31、材料送检率u32、材料运输u33、材料制作及堆放u34).④ 施工方法U4(包括企业资质u41、施工工艺u42、设计施工方案及实施u43及施工方案专家论证u44).⑤ 环境安全U5(包括作业条件u51、周围环境含地质条件u52、气候情况u53、安全防护及标志u54及主要施工技术参数u55).⑥ 安全管理U6(包括安全管理体系u61、项目安全人员配备u62、安全管理目标及制度u63、安全教育及交底u64、班前安全活动u65、安全监督检查及验收u66).
由各个危险区域的风险因素可得随机变量X,即危险区域风险性之间的相关系数
(6)
Wk=
(7)
式中:i,j=1,2,…,n为危险区域 (Hazardous Area,HA)的编号;uHAi、uHAj为危险区域HAi、HAj的风险因素集;Q(·)表示集合元素的数量;Wk为3种条件下的权重系数.
因此,由风险因素法可得标准正态随机向量Z之间的相关系数矩阵为
(8)
(9)
式中:变异系数δi=σi/μi,δj=σj/μj.
1.3 人员疏散模块
采用文献[17]基于二维元胞自动机的地面场模型模拟环境对行人运动的影响.模型网格为四方形,分布在离散网格上的行人元胞采用Moore型邻居,中心元胞可运动到周围8个相邻单元格中.
每一个元胞除了占据的网格编号之外,还有一个额外的“地面场”通过扩散和衰减系数表现行人间的相互作用.“地面场”分为静态地面场Sij和动态地面场Dij.静态场表示出口的吸引作用,不随时间和行人的存在而改变;动态场表示行人间的吸引作用,随着行人的运动而不断更新演变.
元胞自动机地面场模型的更新程序为:对每个离散的时间步t→t+1,行人粒子占据的中心元胞(0,0)运动到被占用(nij=1)的相邻元胞(i,j)的转移概率为0,运动到未被占用(nij=0)的相邻元胞(i,j)的转移概率为[17]
Pij=N(1-nij)dijexp(βJsΔs(i,j))×
exp(βJdΔd(i,j))
(10)
式中:i,j=1,-1;N为归一化因数,使得可能的目标元胞转移概率之和∑(i,j)Pij=1;β为逆温度系数;Js为静态场参数,反映个体对环境的熟悉程度;Jd为动态场参数,反映个体对他人轨迹信息的依赖程度;dij为考虑中心元胞(0,0)中行人粒子来源方向的校正因子;Δs(i,j)和Δd(i,j)为静态场和动态场的梯度.考虑钢平台体系施工现场中危险区域的空间分布和风险的随机性,提出基于风险联合概率修正的转移概率公式为
exp(βJdΔd(i,j))
(11)
(12)
式中:P为随机抽样的概率.
2 某超高层建筑钢平台施工人员疏散分析
2.1 工程概况
以某实际超高层工程项目为依托,考虑风险随机性的超高层建筑施工钢平台人员疏散模型.该项目为某市地标性超高层综合体,集商业、办公和酒店等功能于一体,建筑结构高度249.80 m,塔楼采用矩形框架-核心筒结构,地上部分共56层.
建筑核心筒F3~ F54标准层施工采用钢柱筒架交替支撑式液压爬升整体钢平台模架装备,装备总面积870 m2,共7层,即F1~F7,建筑效果、钢平台施工现场及三维模型如图2所示.正常施工时,钢平台体系处于整体结构的顶部,由钢平台框架、盖板、围挡板及安全栏杆等部件组装,通过钢梁与外墙脚手架区域连接,形成全封闭的高空操作环境.钢平台承载能力较大,可作为施工操作平台和物料中转堆场,基本施工工艺为[18]:塔吊吊运钢筋至钢平台顶层,通过施工人员在格栅板传递至钢平台下层,并在脚手架上绑扎;模板系统就位,混凝土输送至钢平台顶层,由液压布料机进行浇筑;钢平台体系进行标准层爬升.
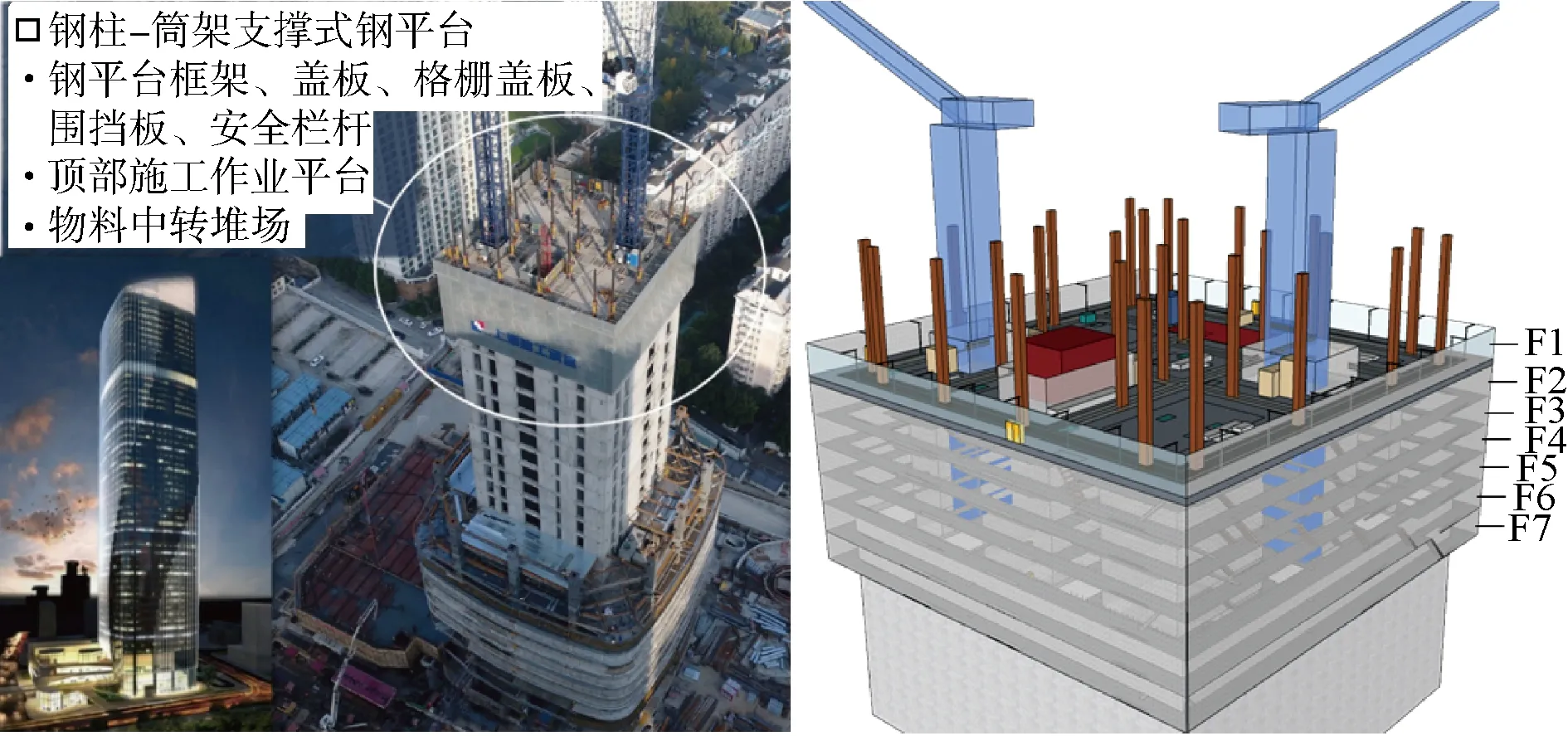
图2 项目效果图、现场图及三维模型图Fig.2 Project rendering,site photo,and 3D model diagram
2.2 钢平台危险区域风险调研及评估
钢平台体系作为施工操作平台和物料中转堆场,设备、物料密集,场地空间复杂,施工人员面临着巨大的风险.风险评估的前提是定义风险,首先对项目钢平台体系划分和定义9个危险区域 HA1~HA9,现场实拍及三维模型示意如图3所示.
采用LEC评价法对危险区域进行风险性量化,HA1~HA9中L、E及C采用的879组数据来源于问卷调研,调研对象为上海建工集团工程总院和各分公司参加过钢平台体系设计或建造的施工专家.根据调研数据计算出D值的对数期望μln D、对数标准差σln D和对数最大值max lnD(见表1),各个危险区域的D值数据频数F′分布直方图和对数正态分布概率密度P′拟合曲线即风险边缘分布如图4所示.
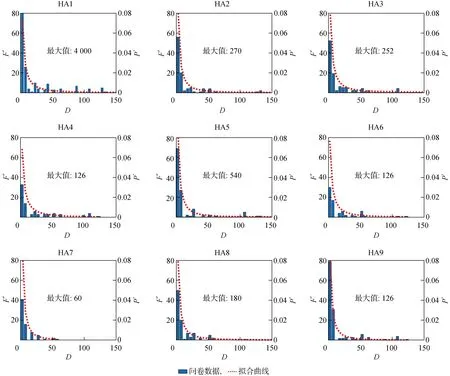
图4 危险区域D值频数分布直方图及对数正态分布概率密度拟合曲线Fig.4 Frequency distribution histogram and probability density fitting curves of lognormal distribution of value-at-risk D for hazardous areas
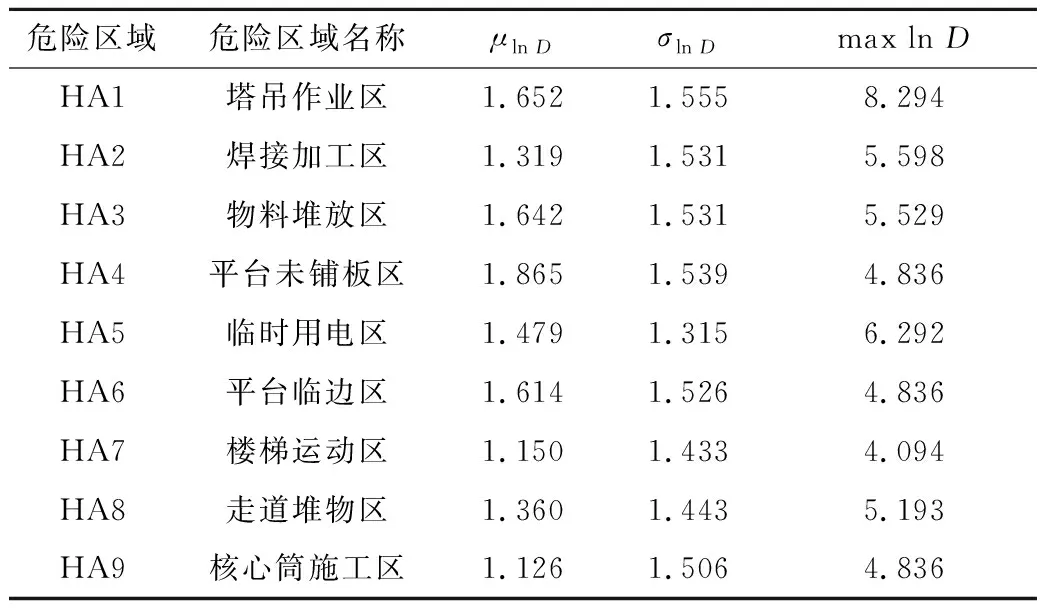
表1 钢平台危险区域LEC风险调研结果Tab.1 Results of LEC risk survey questionnaires for hazardous areas
结合事故树分析和风险因素识别,可得危险区域相关系数(见表2),在完成边缘分布估计和相关性分析之后,多维变量联合概率分布得以建立.
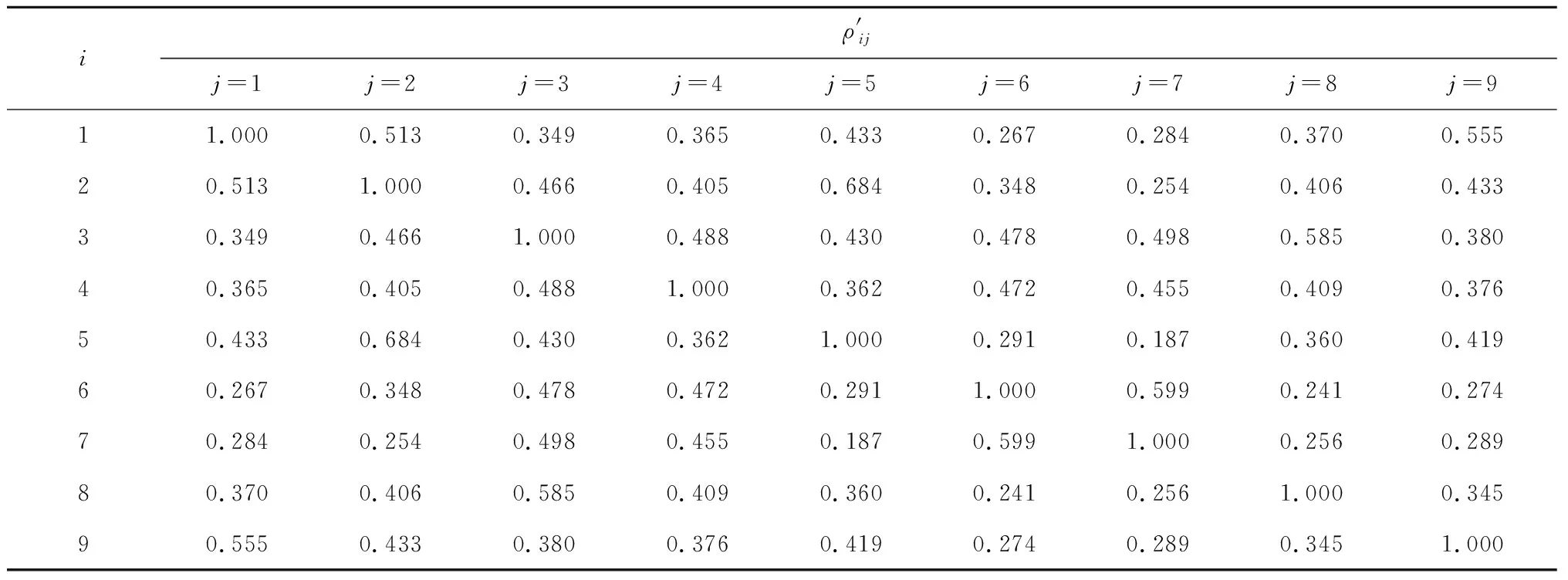
表2 钢平台危险区域相关系数Tab.2 Correlation coefficient of steel platform hazardous areas
基于调研数据所得的max lnD得到相应的逆标准正态累积值,并采用等概率转换原则,计算依次以危险区域HAi(i=1,2,…,9)作为主风险区,在相关性影响下其他危险区域作为次风险区时的联合概率值(PHAi),结果见表3.
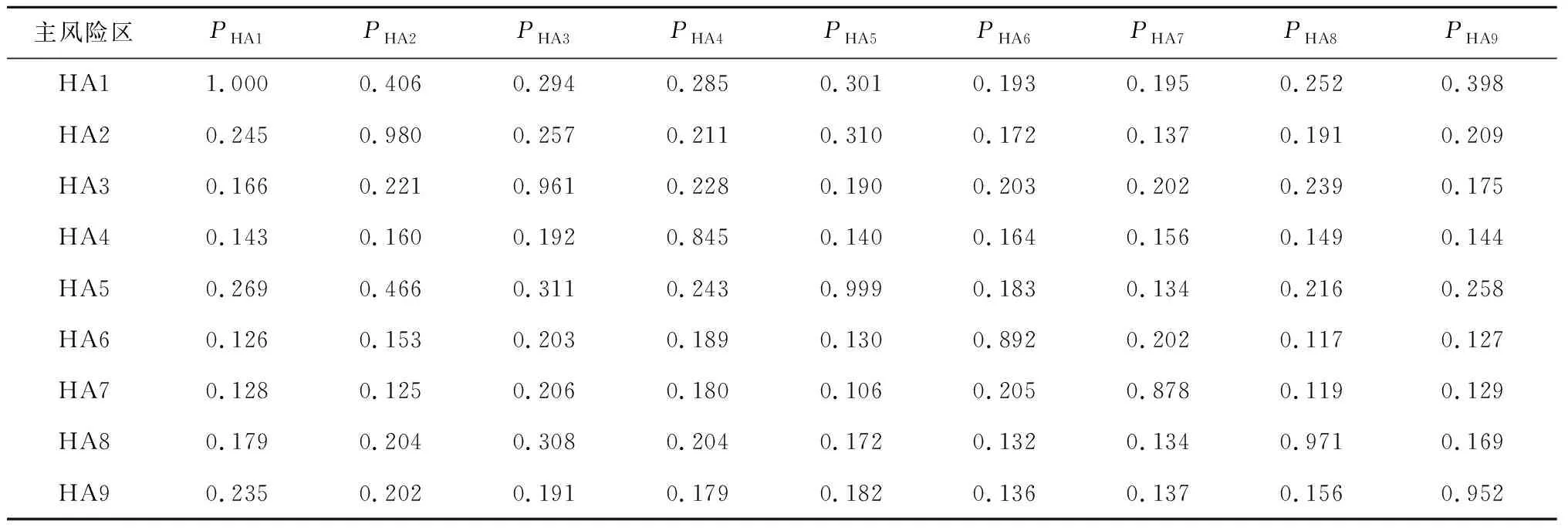
表3 钢平台危险区域HA1~HA9分别作为主风险区的联合概率Tab.3 Joint probability of steel platform considering hazardous areas HA1 to HA9 as the main risk area respectively
2.3 施工人员疏散的元胞自动机模型
2.3.1模型平面及人员布置 元胞自动机程序的网格大小为0.4 m×0.4 m,作为一个行人占据的空间.7层钢平台每层的平面大小为30 m×29.5 m,因此每层的网格数量为75×74=5 550 个.假定核心筒混凝土浇筑进行到钢平台F6层,根据经验施工人员可布置为:F1层10人、F2层10人、F3层10人、F4层10人、F5层10人、F6层14人、F7层6人,共70人.这70人的布置都是随机的,本文共设置了50种人员布置方式,结合不同的假定进行模拟.出口在钢平台顶层,每层之间通过楼梯相连,平面布置及一种典型的人员布置方式如图5(a)所示.
2.3.2模型参数设定 取Js=2,描述施工人员对复杂的钢平台现场环境,尤其是各层楼梯和出口位置的感知程度;取Jd=1,描述施工人员在从众心理驱动下的相互吸引,与出口吸引相比程度较轻[19].另外,动态场衰减系数和逆温度系数分别取α=0.6和β=10[17].
2.3.3水平疏散和垂直疏散 钢平台各层的水平疏散基于二维元胞自动机的地面场模型,包含代表出口吸引力的静态场和代表人员轨迹吸引力的动态场.钢平台体系出口在顶层,每层之间通过楼梯连通,静态场如图5(b)所示,x、y方向分别代表施工场地的长度、宽度方向的网格数,z方向代表静态场.每层静态场的峰值位置对应为出口或楼梯.
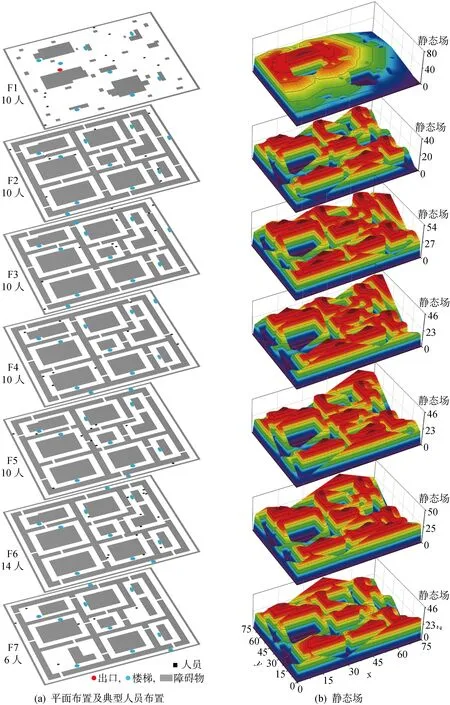
图5 元胞自动机疏散模型平面布置、典型人员布置和静态场Fig.5 Cellular automaton evacuation model layout,typical personnel layout,and static field
钢平台各层的垂直疏散通过楼梯进行,在二维元胞自动机程序中,当行人运动到某一层的楼梯坐标处时,赋予上一层相同坐标的元胞该行人的特征,作为垂直疏散的简化处理.行人元胞从各层全部运动到钢平台顶层F1,并到达F1的出口,视为疏散模拟过程结束.
3 基于风险概率的施工钢平台人员疏散仿真结果分析
本文将危险区域HAi(i=1,2,…,9)分别设为主风险区,在相关性影响下其他危险区域作为次风险区;出口大小分别设为1网格、2网格及3网格,对这9×3=27种假定,分别进行50种人员布置下的算例计算,共计算 1 350 次.
3.1 疏散模拟步数
不同主风险区和出口设定下,模拟50种人员布置的疏散步数,即程序计算步数如图6所示,图中ni为模拟次数,Nstep为每次模拟的疏散步数.结果表明:出口网格数为1时,人员疏散模拟步数平均比出口网格数为2和3时要高19%,且50种人员布置下,主风险区不同引起的随机性更高,其中HA1塔吊作业区、HA3物料堆放区及HA8走道堆物区作为主风险区时最为显著.出口网格数为2和3的结果在数值和趋势上相似度均较高,出口网格数为2时模拟步数平均高2%,两者都是HA6平台临边区、HA8走道堆物区及HA9混凝土施工区作为主风险区引起的结果随机性最为显著.
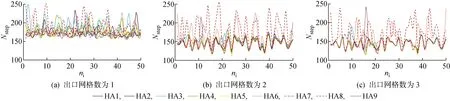
图6 不同主风险区和出口设定下50种人员布置的疏散模拟步数Fig.6 Simulation steps for 50 personnel layouts in different main risk areas and exit settings
3.2 最后疏散的人员初始位置
最后一个疏散成功的人员,标志着整个疏散过程的结束.统计不同主风险区和出口设定下各模拟50种人员布置及最后疏散的人员初始位置所在层数,结果如图7所示.出口网格数为1时,不同危险区域作为主风险区的结果随机性较大,总体而言,最后疏散的人员来自F1层和F7层的总计各占24%和28%.出口网格数为2和3时,最后疏散的人员来自F7层的总计均达到94%,来自F1层的总计3%和2%.
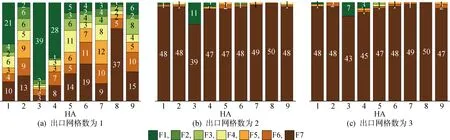
图7 不同主风险区和出口设定下50种人员布置方式中最后疏散者的初始位置Fig.7 Initial position of the last evacuated person for 50 personnel layouts in different main risk areas and exit settings
3.3 最后疏散的人员运动轨迹
钢平台体系的出口在顶层,因此最后疏散的人员在顶层的运动轨迹同样关键,结果如图8所示.出口网格数为1时,最后疏散的人员在顶层的运动轨迹总体上随机性更高,且运动轨迹在出口处堆积,表现了出口较小时人员在出口处的拥堵现象.HA1塔吊作业区、HA3物料堆放区和HA4平台未铺板区作为主风险区引起的运动轨迹随机性最为显著.
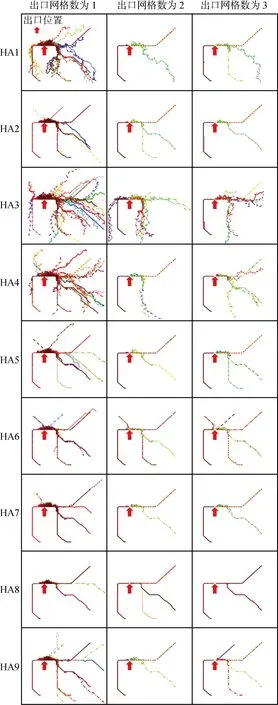
图8 不同主风险区和出口数设定下50种人员布置方式中最后疏散者在顶层的运动轨迹Fig.8 Trajectory at the top floor of the last evacuated person for 50 personnel layouts in different main risk areas and exit settings
3.4 小结
出口网格数为1,即出口较小时,由于出口拥堵人员将在钢平台顶层停留时间较长,所以程序计算的疏散步数、最后疏散的人员状态受顶层危险区域的影响更大,尤其是HA1塔吊作业区、HA3物料堆放区及HA4平台未铺板区作为主风险区的情况.
出口网格数为2和3,即出口较大时,人员拥堵现象大大改善,程序计算的疏散步数、最后疏散的人员状态主要取决于钢平台体系的层数,因此最底层以及中间层中的HA6平台临边区、HA8走道堆物区及HA9混凝土施工区作为主风险区影响最大.
3.5 模型验证
联合概率和元胞自动机都是描述复杂过程的简化方法,因此有必要对模型的有效性进行验证.然而,由于缺乏经验和试验数据,直接对本文提出的施工现场人员疏散模型的结果进行验证是不现实的.因此,本文采用部分验证的方式对模型的可靠性进行论证.
就定性验证角度而言,仿真模型是否再现了特定的疏散现象比较容易验证.比如,危险区域中发生危险事件,行人由于运动障碍或者心理恐慌而出现的短暂停顿,在仿真模型中清楚地得到了表现.就定量验证角度而言,出于试验设计的道德伦理考量,作者尚未能进行考虑危险区域影响的施工现场人员疏散试验;但是基于实际风险问卷调研数据和分析方法提出的危险区域风险评估联合概率模型具有理论和实践价值.因此,当案例计算足够的次数时,结合随机数学理论的疏散模型可以在统计意义上得到准确的平均结果.另外,一些现场试验[20]已经证明元胞自动机地面场模型能够对人员疏散进行模拟仿真.因此,通过在元胞自动机模型中设置具备一定发生概率的“障碍”,从而将风险评估结果纳入疏散仿真模型中是合理可行的.
但是,仅仅依靠理论层面的部分验证显然不够,与实际试验的比较是定量评估仿真模型准确性的重要方法.同时试验数据不仅可以用于仿真结果验证,还可以用于仿真模型的参数校准.为解决该关键问题,作者计划在下一阶段工作中开展更全面的模型验证研究.
3.6 模型局限、改进方向及应用前景
3.6.1模型局限和改进方向 本文目前提出的疏散模型主要有两方面局限:施工人员运动速度和垂直疏散算法的简化.由于施工环境的复杂性,施工人员运动速度需要严谨的考虑,尤其是危险区域对速度的影响还有待研究,本文的元胞自动机疏散模型并没有直接给出疏散时间,而仅仅给出了程序计算步数,即人员运动步数.因此,需要再结合人员运动速度,才能得到可靠的疏散时间.另外,垂直疏散模拟最关键的是楼梯的处理,本文虽然在HA7楼梯运动区中考虑了楼梯对疏散过程的影响,但实际上施工人员在钢平台楼梯上的运动要复杂得多,比如楼梯高度、踏步数对运动步数的影响,楼梯宽度造成人员拥堵的可能性等,都是今后模型改进的方向.
另外,本文假定人员运动至钢平台顶层的出口即为疏散过程结束,实际上施工人员从钢平台出口回到地面通过的是施工升降机,疏散过程真正结束与钢平台施工进度状态关系密切,如何考虑这部分影响值得进一步研究.
3.6.2应用前景 尽管存在一定的局限性,本文的模型具有广阔的应用前景.比如:利用模型结果对施工现场进行风险预判,辅助工程安全预案的制定;与BIM和计算机视觉技术结合,对施工现场人员进行实时风险识别及跟踪;模型应用场景也不局限于钢平台本身,可以推广到任意需重点关注的施工环境.
4 结论
风险的识别量化和人员的安全管控是施工管理的基础和目标,本文提出的考虑风险随机性的超高层建筑施工钢平台人员疏散模型,合理有效地将施工人员面临的环境风险和运动特征进行了描述和量化.理论上为钢平台体系构建了考虑危险区域之间风险相关性的人员疏散模型;应用上促进了经验导向的施工安全预警和人员管控新范式的实践.主要结论有:
(1)本文对钢平台体系进行了危险区域定义和风险因素识别,结合专家问卷调研,获取作业条件危险性评价数据,构建风险边缘分布;
(2)基于多维变量联合分布对危险区域之间的风险相关性进行评估,并作为随机变量引入元胞自动机模型,建立考虑风险随机性的施工人员疏散模型;
(3)针对50种人员布置,进行不同主风险区和出口设定下施工人员的疏散模拟.结果表明:出口越小越容易导致疏散人群拥堵,从而在钢平台顶层停留时间越长,受顶层危险区域影响越大;反之疏散过程则受钢平台总层数和下层危险区域影响更大.
致谢感谢上海建工集团左自波高工、李炎地博士和施臻高工在工程资料和问卷调研方面提供的帮助.
猜你喜欢
农业工程(2022年1期)2022-04-11
逻辑学研究(2022年1期)2022-03-31
延边大学学报(自然科学版)(2021年2期)2021-07-29
华人时刊(2021年23期)2021-03-08
作文新天地(初中版)(2019年6期)2019-08-15
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
智能计算机与应用(2018年5期)2018-10-20
河南科技(2018年7期)2018-09-10
智富时代(2018年5期)2018-07-18