飞机地面除冰资源协同控制
2021-12-06 06:27王立文邢志伟王思博
上海交通大学学报 2021年11期
李 彪,王立文,邢志伟,王思博,罗 谦
(1.中国民航大学 航空工程学院,天津 300300;2.中国民航大学 电子信息与自动化学院,天津 300300;3.中国民用航空局第二研究所 工程技术研究中心,成都 610041)
随着世界经济逐步复苏,完善的交通体系依然发挥着重要作用.作为推动世界命运共同体建设的重要纽带,航空运输高速发展的态势长期内不会改变.飞机地面除冰是北方冬季冰雪低温条件下保障机场安全平稳运行的关键环节,其资源的优化及控制一直是国内外研究热点[1].目前,国内外学者主要采用博弈论[2-4]和智能算法[5-6]研究除冰资源的相关问题.张伟等[7]研究了面向航班延误的飞机除冰过程博弈机理并基于启发式算法优化求解,求解速率较慢.陈斌等[8]分析了除冰参数的能量转换过程并结合遗传算法优化迭代以保证除冰效率.Fan等[9]从除冰液回收为出发点,设计了数据驱动的飞机除冰管理框架并使用动态规划模型优化分配除冰机位.Slim等[10]应用模糊集成式功能共振分析方法量化飞机除冰安全效能以指导车辆作业过程,但缺乏一体化协同约束.Ariyajunya等[11]评估了沃斯堡机场环管系统的有效性,建立了基于决策树的除冰参数优化模型,未考虑与其他除冰资源的协同.
上述方法仍存在协同能力较差的不足之处,故本文面向除冰坪与车辆提出一种基于多Agent的飞机地面除冰资源协同控制方法,面向飞机离港计划构建地面除冰协同运行框架与优化模型并生成全局资源运行方案,以提升机场不利条件下的整体运行策略,并设计子系统的协同控优化模型及控制方法,通过仿真实验说明该方法的有效性.
1 飞机地面除冰资源全局协同优化
机场协同决策(A-CDM)是提升机场航班高密度条件下运行安全和效率的关键手段之一,其中信息共享及里程碑节点时间两个基础规范已在各枢纽机场推广并执行,针对不利条件下的协同运行,提出了飞机地面除冰资源分布式协同运行框架[12],将问题视为全局和自治协同两个阶段,基于实际机场运行模式及约束分别建模求解.
全局协同运行的目标是除冰资源均衡性最优与正点率最高,设计改进招标式多Agent协商算法以获取面向短时离港计划的除冰资源协同运行方案.
自治协同运行以全局分配结果为主体,以最大化安全起飞裕度为目标,依据保持时间与对应资源的约束条件[13],构建自治子系统的除冰资源优化模型并求解,保证本除冰区域内安全高效运行,协同运行框架如图1所示,图中n为自治子系统编号.

图1 基于改进招标式多Agent协商的除冰资源协同运行框架Fig.1 Frame for collaborative operation of deicing resources based on improved bidding multi-Agent negotiation
1.1 全局多Agent除冰资源协同优化架构
针对除冰资源的分布式协同运行过程,建立面向全局协同运行的Agent模型,引入招投标机制作为中枢层,基于除冰资源运行规范优化多Agent协商模块完成除冰资源层和任务层的信息共享,结合机场运行态势生成全局协同运行方案,模型架构如图2所示.在全局模型中,各自治系统参与任务竞标的权力由机场运行模式及自治系统区位分布所决定,而资源配置方案是由跑道开放和气象条件共同确定.参与竞标的自治系统基于自身属性与配置均等优化分配除冰任务,协商中枢依照均衡原则及均等判决约束选择最优任务执行方,从而提升机场整体的除冰保障能力.
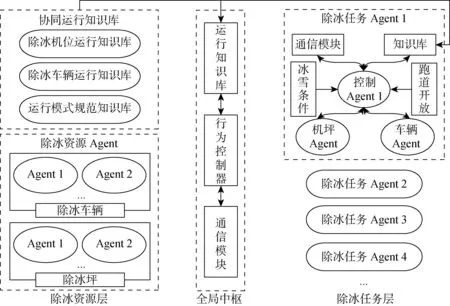
图2 全局除冰资源运行Agent模型Fig.2 Agent model of global deicing resource operation
1.2 面向飞机离港计划的任务招标
定义除冰任务Agent集合{Mi|i=1,2,…,m},其中任务Agent的元素数量m表示决策时段T内申请除冰作业的离港飞机数量;除冰坪Agent集合{Sj|j=1,2,…,s},表示共有s块除冰坪,且各除冰坪内按照机型的大小设置了sj个匹配不同工艺的除冰机位;除冰车辆Agent集合{Vj|j=1,2,…,s},集合中Agent元素分布于各除冰坪中,且已经按当前气象条件下的除冰流程完成编队,其中Vj中有vj个除冰车辆编队可参与协同控制.
除冰任务Mi通过控制Agent向全局中枢发送招标书并申请除冰资源Sj与Vj,招标书向量为Bi=[TiDiRiAiCiGjFjPj],其中Ti为预计推出时间,Di为计划离港时间,Ri为起飞跑道,Ai为机型,Ci为除冰工艺(关车/慢车除冰),Gj为除冰资源的保障能力得分,Fj为综合补液能力得分,Pj为平均正点率得分,相关表达式为
(1)
(2)
(3)
(4)

1.3 除冰资源竞标与评标

(5)
否则返回竞标书为空,由除冰指挥人员指定资源执行该任务.



其中,除冰坪内满足任务工艺Ci机位的均衡率ej表示在决策时段T内接收的任务数量在时间上服从均匀分布,即
式中:NCi为除冰坪内满足工艺机位数;Nk1为已承接任务数;Dk2为承接第k2个任务的计划离港时间;T′为当前时刻;T*为均衡性最大容限.最后,优化结果随除冰任务Agent元素输出协同运行方案,作为自治子系统的输入.
2 自治多Agent除冰资源协同控制方法
2.1 自治协同优化模型
自治系统除冰资源协同运行多Agent模型图如图3所示,自治系统除冰资源协同运行多Agent模型以承接的运行方案为主体,并且以相应资源为被控对象,建立面向除冰任务的资源动态协同控制方法[14].
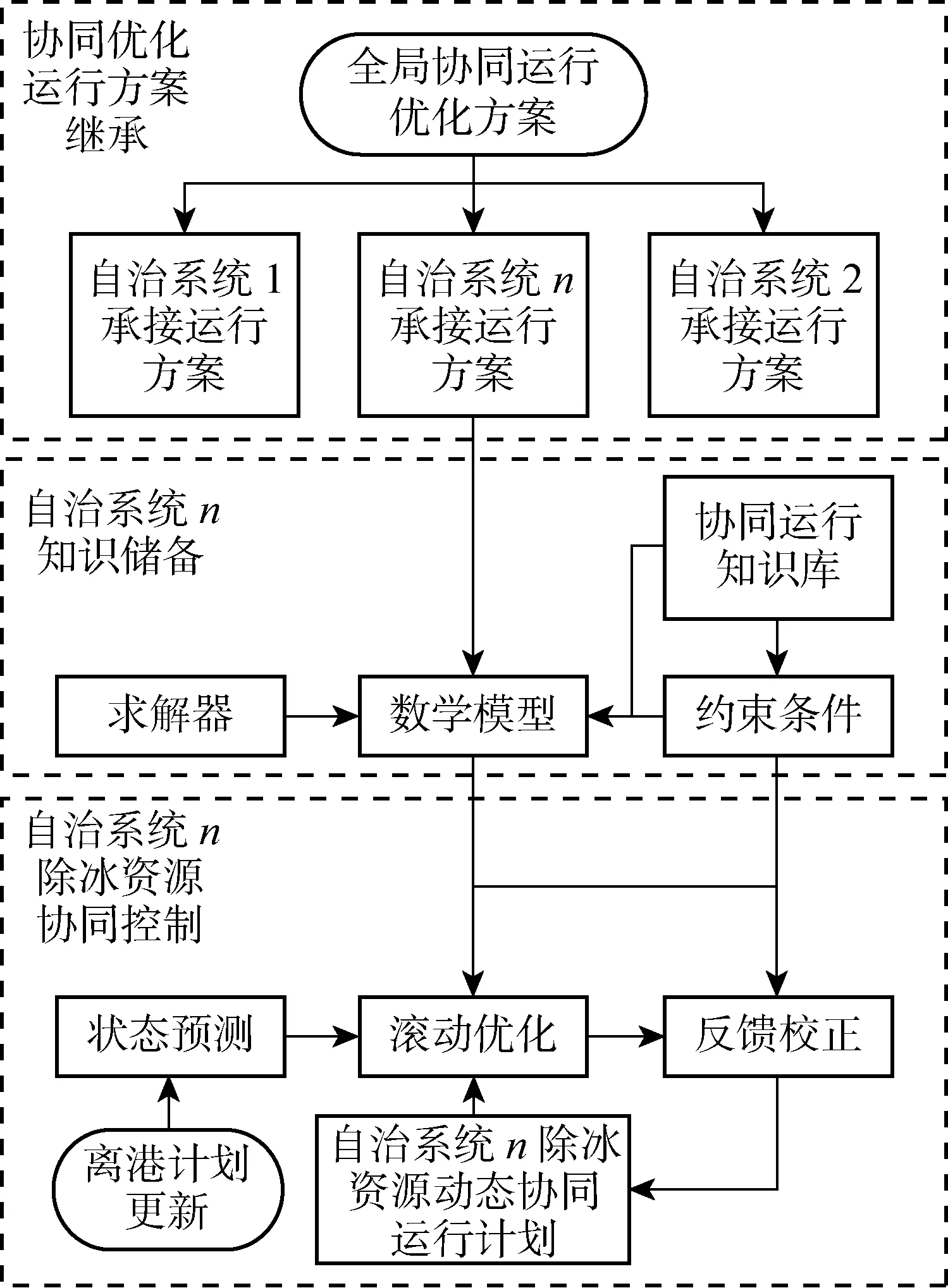
图3 自治系统除冰资源协同运行多Agent模型Fig.3 Multi-agent model of collaborative operation of deicing resources in autonomous system
飞机地面除冰实际作业过程中,为确保航班准点起飞,需保证除冰结束与计划起飞时间的差值(即起飞容限)最大,为移交塔台后序的队列处理提供裕度,因此模型的目标函数为
(6)

(7)

自治系统协同优化数学模型的约束条件源于机场除冰运行标准,从安全、匹配、配置实现资源约束.安全约束主要体现在不同冰雪条件下飞机起飞容限小于安全保持时间τb以避免二次结冰,且同一机位前后任务不能冲突的同时留有一定的缓冲时间τc:
(8)
(9)

(10)

(11)
(12)
同时,由于除冰液回收的复杂性,各除冰机位预期利用率需尽可能匹配,即
(13)

配置约束指除冰机位和车辆的工作总量不能超过方案配置,即
(14)
(15)

2.2 除冰资源协同控制方法
基于模型预测控制(Model Predictive Control,MPC)设计了除冰资源协同控制方法框架,如图4所示,图中:r为迭代次数,E为优化时段,MPC相关参数根据机场冰雪条件下运行流程及标准确定,同时为减少迭代次数和复杂度,在传统MPC中加入优化决策因子作为触发机制[15],基本步骤如下:
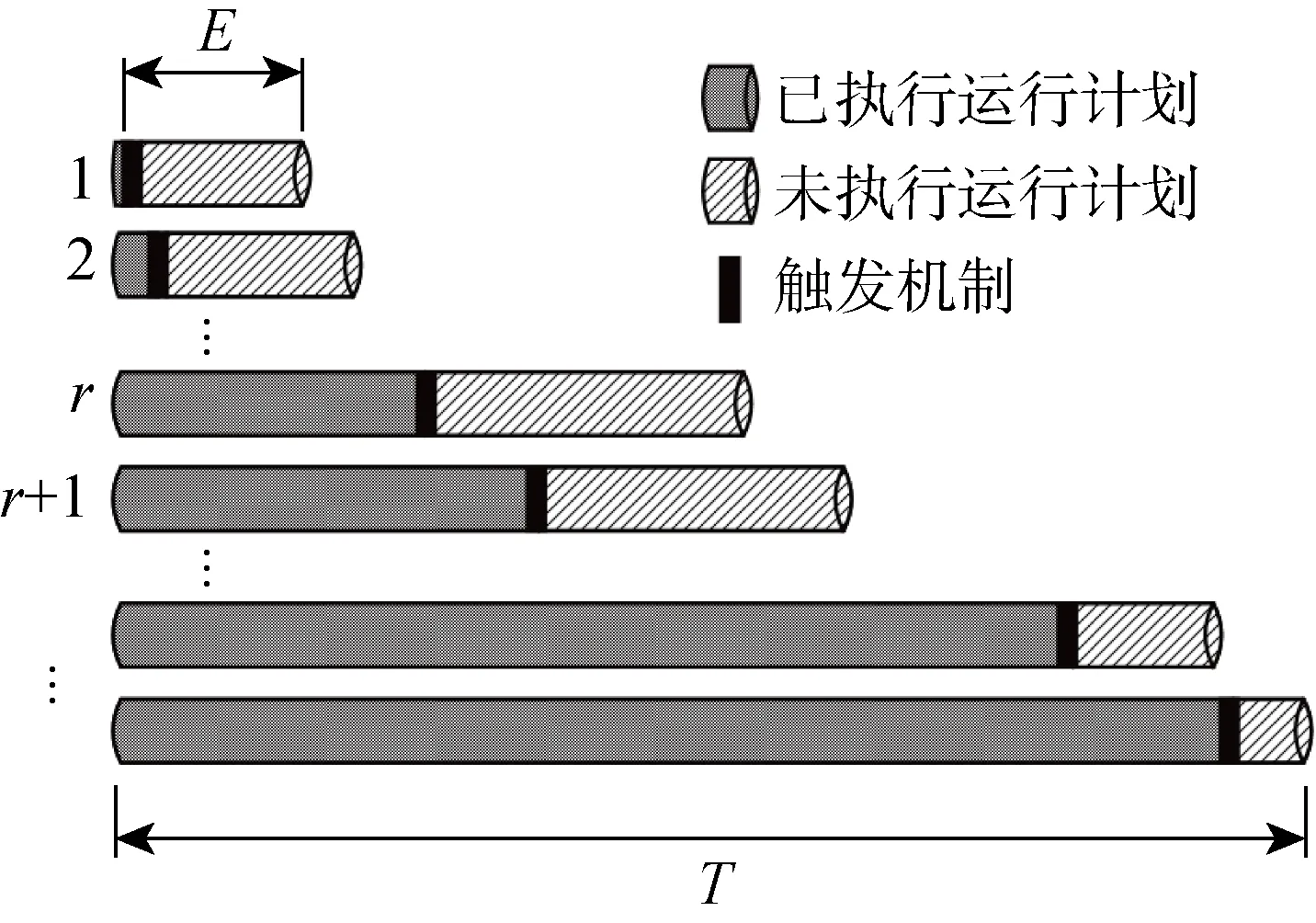
图4 除冰资源协同控制方法基本框架Fig.4 Basic framework of collaborative control method for deicing resources
步骤1由全局运行方案导入自治系统承接除冰任务及其属性,并获取除冰资源时空分布与配置参数,根据机场运行模式进行初始化.
步骤2在机场协同决策系统中查询决策时段内所有承接任务的计划推出与离港时间,根据式(7)~(16)所构建的协同优化模型初步生成除冰资源运行计划.
步骤3随时间演化更新状态,计算各除冰任务的决策因子δi1,用于判断各除冰任务是否需要再优化,即
(16)

步骤4判断各除冰任务的δi1是否大于1,若已完成或正在完成任务(飞机已推出)的δi1大于1,则对应除冰机位的后续任务及资源全部进入滚动优化空间Θ重新求解,若为待完成任务(飞机未实际推出),则仅该任务及对应资源导入至Θ.
步骤5基于协同优化模型再次面向Θ迭代求解,若为空解,则将未完成任务对应的前后邻接待完成除冰任务及资源导入至Θ,对滚动优化空间Θ内的任务及资源再次求解,直至存在最优解.
步骤6以最优解反馈校正除冰资源的协同控制策略,并根据生成的优化计划调整全局协同运行方案和除冰等待排序[16].
步骤7在决策时段T内随优化时段E的推进及A-CDM系统中共享离港信息的动态更新重复步骤 3~6.
3 算例分析
3.1 仿真实验数据及参数设置
以国内某机场为场景展开分析,除冰资源空间分布如图5所示,除冰资源配置情况见表1,同时假设该机场目前在气温 -5 ℃小雪的条件下由南向北运行模式且不考虑跑道关闭,启用1~4号除冰坪,由A-CDM系统中导入任务计划.

表1 机场除冰资源配置Tab.1 Allocation of deicing resources at the airport
根据实际运行场景和标准可知,除冰工艺的不同导致除冰资源的作业时长不一致,由先验数据可知,不同工艺的除冰安全时间存在差异,其中关车除冰为13 min,慢车除冰为6 min,平均滑行等待时间为3.35 min,缓冲时间为3 min.
本文所提出的飞机除冰资源协同控制方法基于MATLAB编程实现,同时,参考该机场冰雪条件下运行预案,设置协同优化控制决策时段为1 h,优化时段和迭代次数由优化决策因子实时计算结果判定,根据历史数据可知在外部条件和运行模式下,不间断作业下单位时间内1~4号除冰坪的最大保障能力如图6所示.
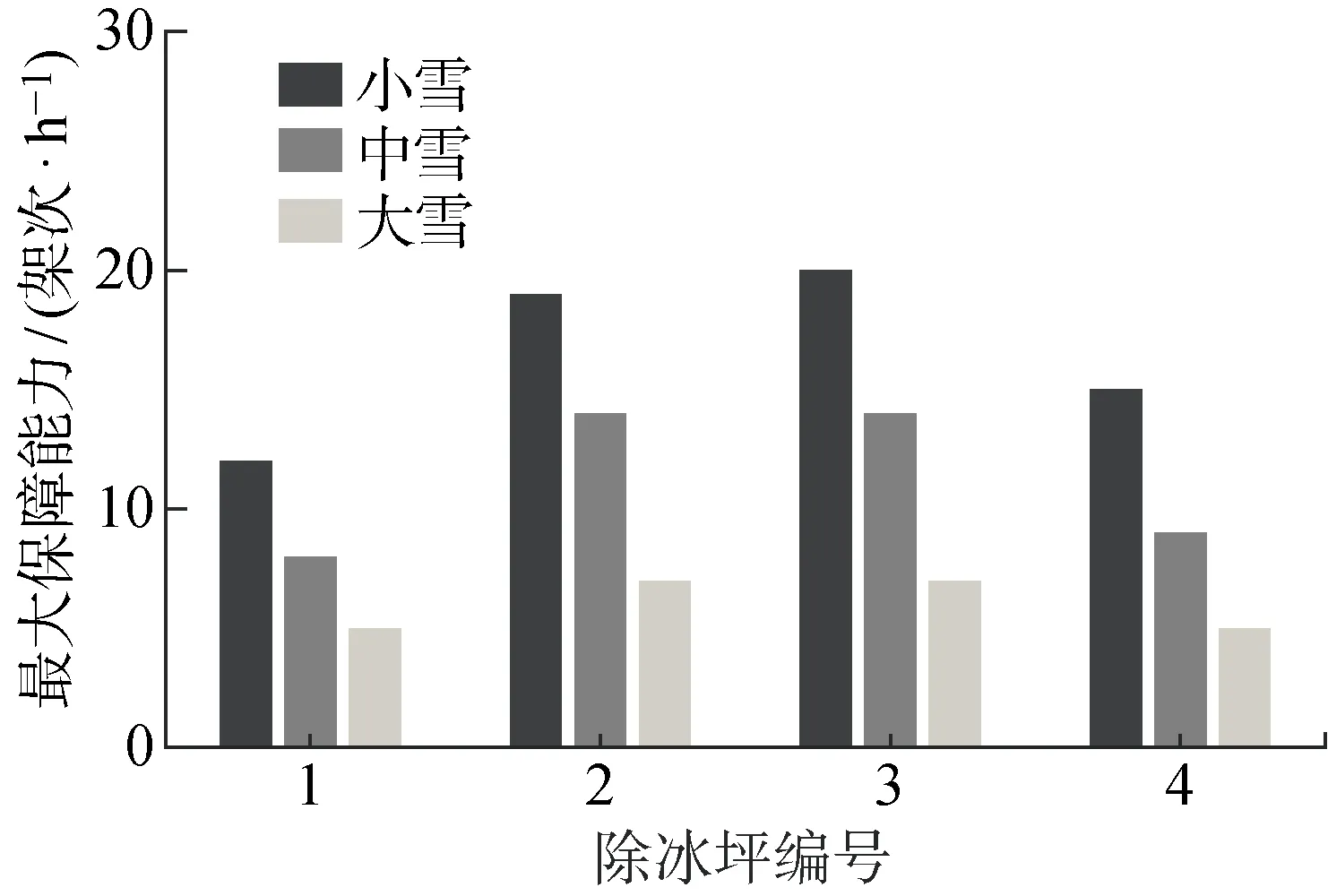
图6 不间断作业除冰坪的最大保障能力Fig.6 Maximum guarantee capacity of uninterrupted operation deicing stands
3.2 仿真结果及分析
根据前一时段除冰任务的完成情况及效果计算各除冰坪的综合得分见表2,可知综合表现最优的为2号除冰坪,表现最差的是4号除冰坪.

表2 除冰资源综合得分情况Tab.2 Comprehensive score of deicing resources
由历史数据可知,按照飞机预计推出时刻排序下一时段共有55个飞机地面除冰任务(记为M1~M55).基于除冰任务属性及资源综合得分开展下一时段招标和竞标,各除冰任务均衡情况如图7所示,在机场安全约束的条件下的协同优化结果见表3.

图7 各除冰任务均衡率Fig.7 Equilibrium rate of each deicing task
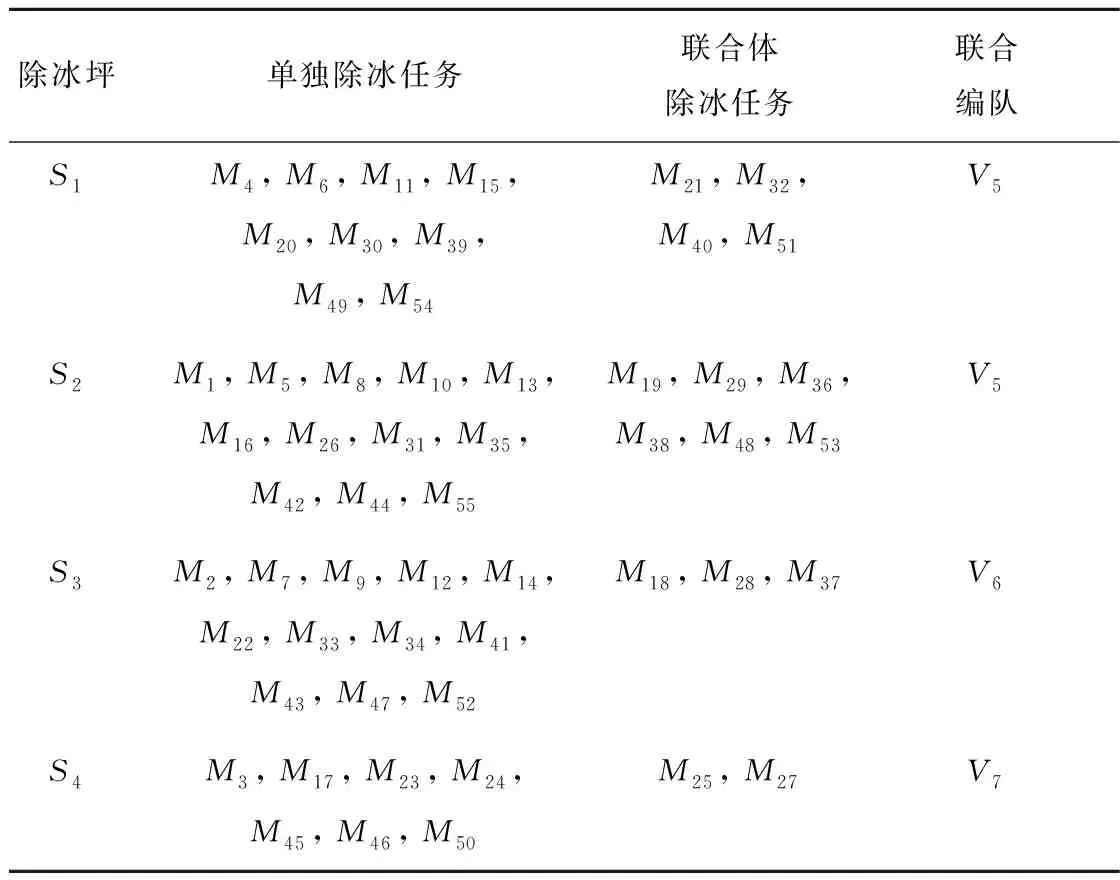
表3 下一时段除冰资源协同优化运行方案Tab.3 Collaborative optimization operation plan for deicing resources in next period
由表3可确定各自治系统下一时段的除冰任务,并基于上述结果得到各系统或联合体除冰资源协同控制策略.
针对2号除冰坪的优化方案验证协同控制方法,以当前时刻(10:40)从A-CDM系统中导出的预计推出和起飞时间,生成该自治系统的初始化策略,如图8所示,图中V(x,y)表示第x个除冰车集合的第y个除冰车编队(配置情况见表1).同时计算各机位的平均容错时间:
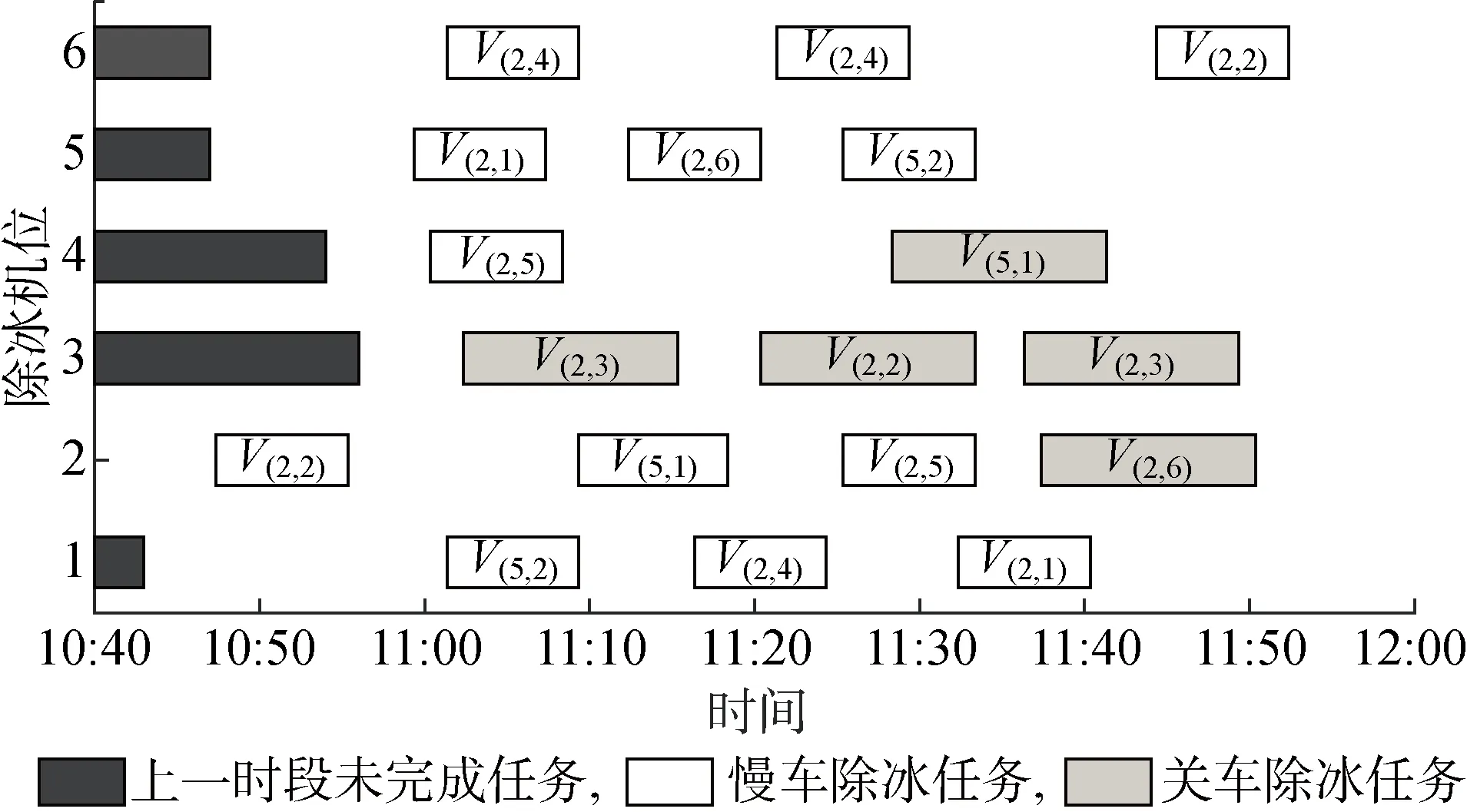
图8 初始化协同控制策略Fig.8 Initialized cooperative control strategy
(18)

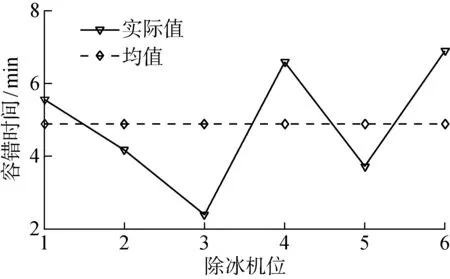
图9 初始化策略容错时间Fig.9 Fault tolerance time for initialization strategy
随着机场运行过程的推进,由优化决策因子触发滚动优化,控制策略也会相应改变,本时段运行结果如图10所示.优化决策因子的加入简化了传统MPC方法的计算复杂度,将求解时间控制在了动态过程可接受的范围内.

图10 协同控制运行仿真结果Fig.10 Simulation results of cooperative control operation
计算滚动优化过程生成控制策略的平均容错时间变化如图11所示,可知所提方法的在保证各除冰机位任务分配均衡的基础上整体提升了自治系统的容错时间,控制策略随时间演化的表现比实际运行较好,满足系统稳健性的要求.

图11 平均容错时间变化趋势Fig.11 Trend of average fault tolerance time

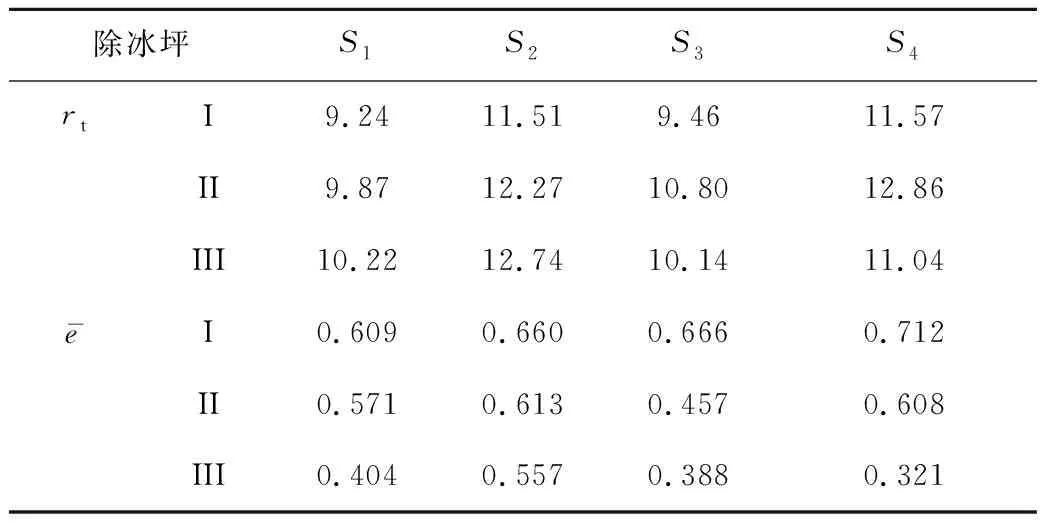
表4 仿真优化参数对比结果Tab.4 Comparison results of simulation optimization para-meters
为验证所提方法的安全性和协同能力,计算各除冰机位的平均起飞容限和机位利用率,并与传统MPC、遗传算法[8]、多智能体耦合[12]仿真结果对比,如图12所示.由图12可知,所提方法加入了面向状态演化预测的MPC滚动优化和决策优化机制后,相较于其他传统方法起飞容限最大提升1.052 min且各除冰任务在安全保持时间内且呈现出均衡状态,除冰机位平均利用率最大提升了15.28%.
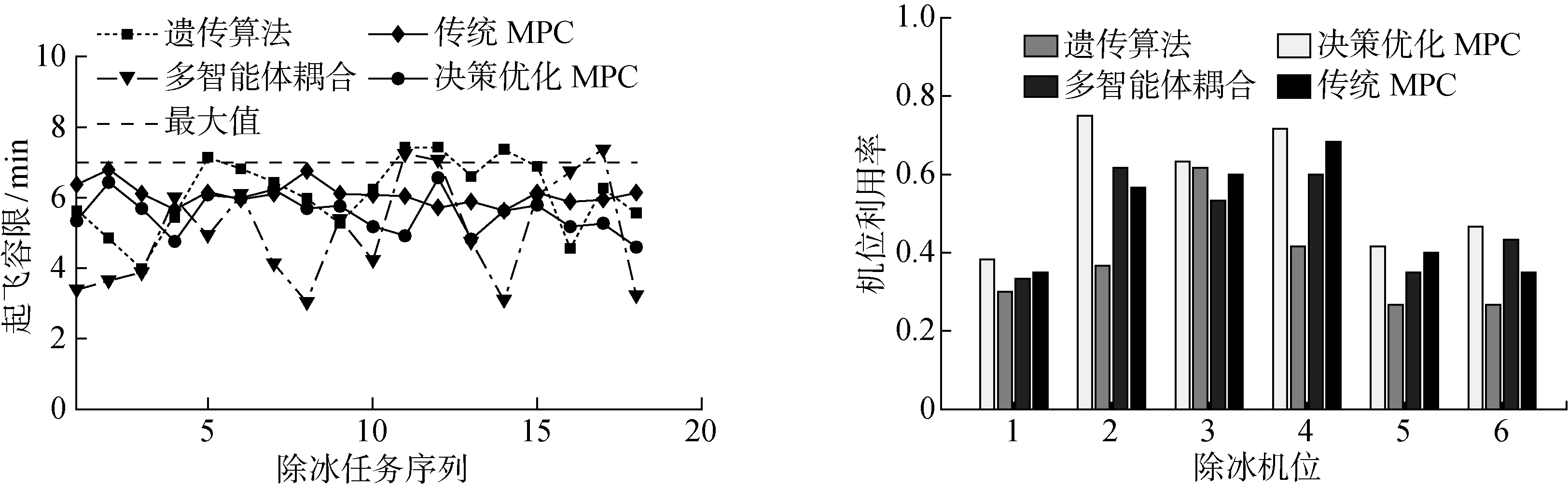
图12 协同控制效果对比Fig.12 Comparison of collaborative control effects
4 结语
本文以飞机地面除冰资源分布式时空配置来刻画协同运行框架,建立了建立面向全局协同运行的多 Agent 模型,提出了基于个体与联合体协商的除冰资源协同优化方法,以提升并行除冰任务的处理能力与效率.所设计的自治子系统多Agent模型在保障承接运行方案的同时,完善了对应目标函数和约束条件并基于改进的MPC求解,所得结果在协同性和稳健性上更具优势.未来将研究随机扰动下的飞机地面除冰资源协同优化及作业编队控制,以增强协同控制方法的稳定性.
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
中国医院院长(2022年13期)2022-08-15
工业建筑(2022年3期)2022-08-01
传播力研究(2019年20期)2019-10-21
现代计算机(2019年19期)2019-08-12
金桥(2018年4期)2018-09-26
环球时报(2017-12-11)2017-12-11
数码影像时代(2015年6期)2015-10-20
数码影像时代(2009年12期)2009-01-28