一种顾及模糊度浮点解特性的RTK质量控制方法
2021-12-04 07:34:42李绿洲
导航定位学报 2021年6期
李绿洲,韩 鹏,罗 杰
一种顾及模糊度浮点解特性的RTK质量控制方法
李绿洲,韩 鹏,罗 杰
(武汉地铁运营有限公司,武汉 430000)
针对观测数据质量不佳,噪声较大的应用情景,提出了一种基于双向卡尔曼(Kalman)滤波并估计模糊度浮点解与固定解差值的实时动态载波相位差分(RTK)质量控制办法。该方法采用前后向相结合的双向Kalman滤波方法提升解的数量和质量,在每个历元中对模糊度浮点解和固定解的差值进行排序,筛选更为可靠的卫星子集进行模糊度固定。以某桥梁全球卫星导航系统(GNSS)变形监测数据为例进行实验,结果表明该方法可以适应复杂环境带来的影响,达到监测解算的精度。
卡尔曼滤波;双向滤波;模糊度固定;变形监测;实时动态载波相位差分质量控制
0 引言
近年来,全球卫星导航系统(global navigation satellite system, GNSS)技术在各类大地测量和地质工程等应用中发挥巨大作用。其中,实时动态载波相位差分(real-time kinematic, RTK)技术是提供高精度定位分辨率的有力手段,因此被广泛应用于地质灾害监测和桥梁运营期监测[1-2]。利用RTK技术在短基线情况下可以有效消除卫星和接收机钟差,并减轻数据处理过程中的电离层和对流层延迟。但是因为容易受到多路径效应和随机噪声的影响,无法在恶劣环境下始终获得可靠的固定解,因此有必要运用一些策略来进行RTK质量控制[3]。
卡尔曼(Kalman)滤波作为一种重要的最优估计理论,被广泛应用于各种领域[4-5],是一种基于系统噪声特性和当前测量值做出最佳估计的动态算法,可用于整周模糊度浮点解估算。为削弱模糊度参数影响,提高收敛速度,可以将正反向卡尔曼滤波的思想引入到参数估计中[6-7]。
此外,如何选择合适的模糊度解算策略保证较高的模糊度固定率和成功率是必须要解决的问题[8],所以十分有必要对模糊度求解算法开展深入的研究[9],提高RTK定位的精度和可靠性。
1 正反向Kalman滤波
Kalman滤波作为一种最优估计理论与方法,具有实时递推、存储量小和简单易行的特点,在各工程领域广泛应用。为削弱噪声影响,提高收敛速度,将正反向卡尔曼滤波引入到参数估计中。
针对观测方程非线性的情况,正向扩展的Kalman滤波表达式为

相对地,反向滤波可以表示为
通过融合前向滤波和后向滤波的最优估计结果,完成整个区间的平滑,可以更好地提高收敛速度,降低噪声的影响。
2 顾及模糊度浮点解与固定解差值的RTK质量控制
在RTK解算过程中,一般采用如文献[10]中提到的最小二乘模糊度降相关平差(least-square ambiguity decorrelation adjustment, LAMBDA)方法进行模糊度固定,该方法需要模糊度的浮点解及其方差信息,通过整数降相关和整数最小二乘方法获得多组模糊度固定解,最后通过最优解和次优解与阈值的比较来判断是否可以获得可靠的固定解。
在观测质量较差时,往往由于某颗卫星的浮点解精度较差造成无法通过检验,而此时由于模糊度数量的问题通过常规的基于成功率的部分模糊度方法无法完成模糊度筛选,因而本文提出基于模糊度浮点解与固定解变化量的方式剔除可能存在问题的卫星。
仅需由第1组最大的卫星开始,剔除并尝试利用LAMBDA方法固定,即可得到固定解。值得注意的是,在不同的环境背景下,需要设置不同的最小固定卫星数量,否则较差的几何条件下的固定解并没有意义,该算法流程见图1。
3 实验分析
以实测桥梁监测数据为例,该数据集采集于湖北武汉,观测日期为2020年9月23日—2020年9月25日,共计3 d,采样间隔为15 s。该数据集观测条件较差,数据噪声较大,监测点周围树木较多。首先针对2020年9月23日数据单独分析,经过数据格式转换、元数据编辑及数据质量检查(translation, editing and quality checking, TEQC)软件处理,数据完整率仅为56%,其周跳比为31,多路径指标MP1值和MP2值分别为4.69 m和6.59 m。
图2和图3分别为该站的载噪比累积概率分布图和残差时间序列图,可以发现该站约有50%的观测值载噪比都在40 dB·Hz以下,且双差残差较大,最大残差达到12.52 m,这进一步证明了该站受环境影响严重。

图2 双差观测值载噪比

图3 双差残差
针对该数据集的情况,现采用正反双向卡尔曼滤波和顾及模糊度浮点解与固定解差值的质量控制方法进行算法改进。其中,正反向卡尔曼滤波通过保存正向滤波结果和方差即可实现,而估计模糊度差值的算法将以2020-09-23 T 04:09:15历元为例具体分析。
该历元参与模糊度解算的双差模糊度共计9个,如表1所示。其中第1列、第2列分别为双差模糊度卫星情况,第3列、第4列为模糊度浮点解与固定解,第5列为模糊度浮点解与固定解差值。直接采用所有模糊度进行LAMBDA方法搜索,ratio值仅为1.27,小于常规认为的3.0阈值,无法得到可靠的固定解。采用本文提出的方法,经过排序,C01号卫星模糊度浮点解与固定解差别最大,则剔除该卫星模糊度。剔除C01卫星后,ratio值变为3.60,大于3.0,认为得到可靠的模糊度固定值,根据模糊度与坐标的方差协方差关系即可得到固定的基线解。
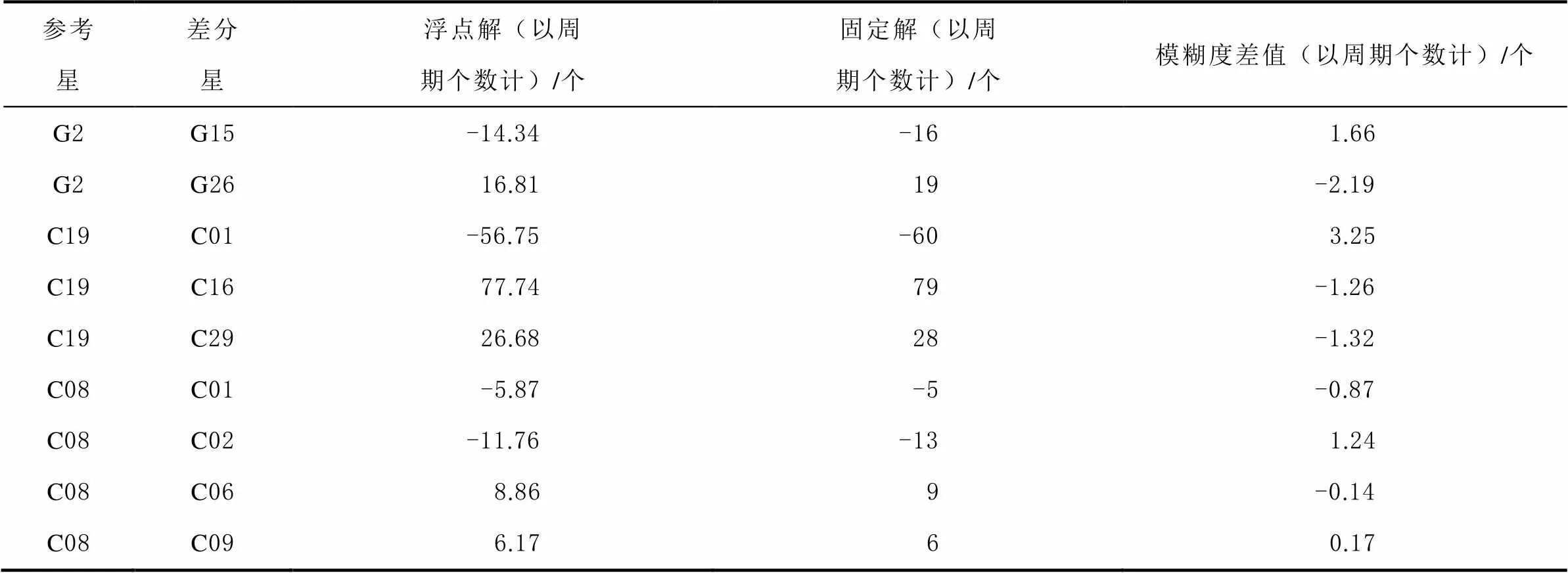
表1 2020-09-23 T 04:09:15历元参与解算双差模糊度情况表
表2和表3分别展示了改进算法前后的解算误差统计情况。图4则为算法改进后的坐标误差时间序列图。观察图表可以发现,算法改进前难以固定,固定率仅有13.6%,东()、北()、天顶()方向上的最大误差分别达到了-1.847、-0.342和1.261 m,标准差达到了0.152、0.067和0.239 m。算法改进后固定率达到97.7%,在、、三个方向的最大定位误差分别减小了89.7%、38.3%、58.9%,而在、、三个方向上的定位精度分别提高了93.9%、87.6%、91.5%。

表2 2020-09-23数据原始算法解算结果误差统计表单位:m

表3 2020-09-23数据改进算法解算结果误差统计表单位:m

图4 算法改进后E、N、U方向误差曲线
本文针对3 d 的全部数据集进行分析,表4展示了本文提出的改进算法和加米特(GAMIT)软件的比较结果。其中每个单元格第一个数据表示基线解算结果,括号内代表精度信息。分析可得,GAMIT 软件由于对观测质量有要求,在年积日(day of year, DOY)第269天时无法得到解算结果,而DOY第267—268天的结果较为稳定。而本文改进算法3 d 全部输出了解算结果,且外符合精度更优。
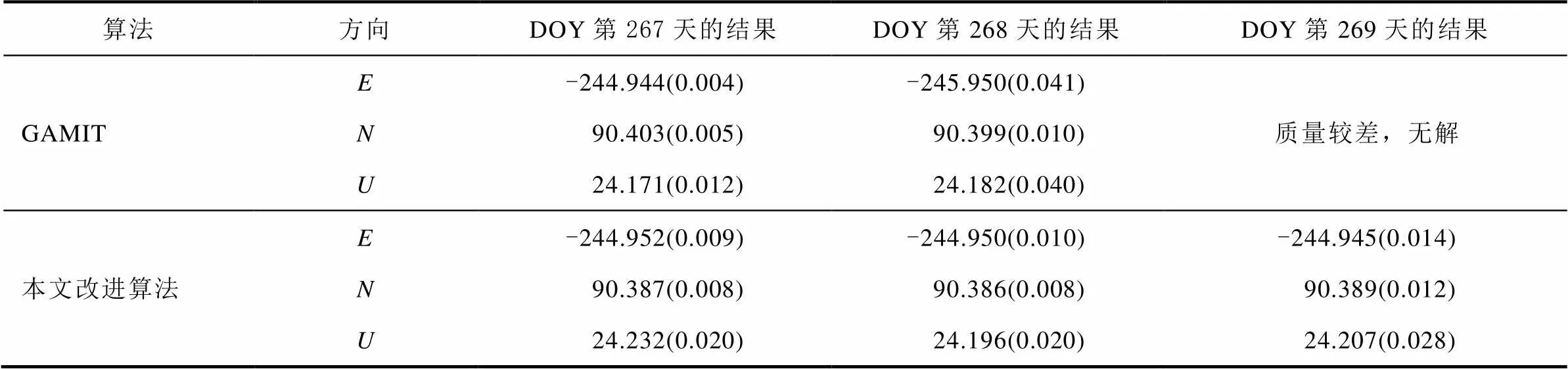
表4 本文改进算法和GAMIT比较 单位:m
4 结束语
当观测条件较差,观测质量不佳时,利用双向卡尔曼滤波并估计模糊度浮点解和固定解的变化剔除质量较差的卫星可以提升解算结果的数量和精度。实现该方法的关键是使用LAMBDA方法后对模糊度的浮点解和固定解的变化量进行排序,根据实际的观测情况选择合适的最少固定卫星数,即可得到更为可靠的结果。
[1] 熊春宝, 王猛, 于丽娜. 桥梁GNSS-RTK变形监测数据的多滤波联合去噪处理[J]. 测绘通报, 2020(7): 93-96.
[2] 梅秀道, 钟继卫, 史晶. GNSS-RTK在大跨斜拉桥施工期位移监测中的应用[J]. 桥梁建设, 2020, 50(4): 36-41.
[3] 刘新华, 尚俊娜, 施浒立. 基于GNSS-RTK技术的双层滑坡监测系统设计与实现[J]. 电子技术应用, 2020, 46(11): 1-7.
[4] 马龙. 基于Kalman滤波的变形监测数据云分析系统研究[D]. 成都: 西南交通大学, 2017.
[5] 吕伟才, 秦永洋, 孙兴平, 等. Kalman滤波在地表移动观测站沉降监测中的应用研究[J]. 合肥工业大学学报(自然科学版), 2011, 34(9): 1370-1374.
[6] GELB A. Applied optimal estimation[M]. Cambridge, MA: MIT Press, 1974.
[7] 阮仁桂, 郝金明, 刘勇. 正反向Kalman滤波用于动态精密单点定位参数估计[J]. 武汉大学学报(信息科学版), 2010, 35(3): 279-282.
[8] 雷飞. 动态单历元整周模糊度解算方法对比分析[D]. 成都: 西南交通大学, 2018.
[9] 侯燕青. 多卫星导航系统RTK定位部分整周模糊度解算方法研究[D]. 长沙: 国防科学技术大学, 2017.
[10] TEUNISSEN P J G. Integer least-squares theory for the GNSS compass[J]. Journal of Geodesy, 2010, 84(7): 433-447.
A method of RTK quality control considering the characteristics of float ambiguity
LI Lyuzhou, HAN Peng, LUO Jie
(Wuhan Metro Operation Co. Ltd., Wuhan 430000 , China)
For the application of poor observation data quality and high noise, an Real Time Kinematic (RTK) quality control approach based on forward-backward combination Kalman filter and estimating the difference between float solution and fix solution of ambiguity was proposed. In this method, the forward-backward combination Kalman filter method was used to improve the quantity and quality of the solutions. The difference between the float solution and the fix solution of the ambiguity was sorted in each epoch, and the more reliable satellite subset was selected for the integer ambiguity resolution. Taking a Global Navigation Satellite System (GNSS) deformation monitoring data as an example, experiments were carried out using the proposed algorithm. The results showed that the proposed method could adapt to the influence of complex environment and achieve the accuracy of real-time monitoring solution.
Kalman filter; forward-backward combination filter; ambiguity resolution; deformation monitoring; real-time kinematic quality control
P228
A
2095-4999(2021)06-0112-04
李绿洲,韩鹏,罗杰. 一种顾及模糊度浮点解特性的RTK质量控制方法[J]. 导航定位学报, 2021, 9(6): 112-115.(LI Lyuzhou, HAN Peng, LUO Jie. A method of RTK quality control considering the characteristics of float ambiguity[J]. Journal of Navigation and Positioning, 2021, 9(6): 112-115.)
10.16547/j.cnki.10-1096.20210617.
2021-03-05
李绿洲(1993—),男,新疆伊犁人,硕士,研究方向为大地测量与变形监测。
韩鹏(1986—),男,湖北武汉人,本科,工程师,研究方向为桥梁与隧道结构。
猜你喜欢
北京大学学报(自然科学版)(2022年4期)2022-08-18 06:41:26
导航定位学报(2022年2期)2022-04-11 03:17:34
大地测量与地球动力学(2022年1期)2022-01-11 10:23:02
大地测量与地球动力学(2021年10期)2021-04-17 00:51:00
铁道通信信号(2019年4期)2019-10-10 03:42:38
石油地球物理勘探(2017年4期)2017-12-18 07:14:49
北京航空航天大学学报(2017年9期)2017-12-18 07:12:25
电源技术(2016年9期)2016-02-27 09:05:39
电源技术(2015年1期)2015-08-22 11:16:28
电测与仪表(2015年18期)2015-04-12 00:45:24