一种UWB定位系统自主完好性监测方法
2021-12-04 07:34:34徐爱功史政旭王长强
导航定位学报 2021年6期
徐爱功,史政旭,高 嵩,王长强
一种UWB定位系统自主完好性监测方法
徐爱功,史政旭,高 嵩,王长强
(辽宁工程技术大学 测绘与地理科学学院,辽宁 阜新 123000)
针对超宽带(UWB)异常数据中的粗差和非视距(NLOS)误差等严重影响UWB定位系统精度和可靠性的问题,设计了一种UWB定位系统自主完好性监测方法。该方法采用基于数理统计的卡方全局检验和标准正态分布检验的故障定位理论,通过各基站观测值残差构建检验统计量,通过误警率和概率分布函数进行检验门限设置。将检验统计量和设置的检验门限进行比较,对观测值的故障情况进行检验、定位、监测,从而剔除UWB观测值中的异常数据。实验结果表明,该方法能够有效剔除测距异常值,提高UWB定位系统的定位解算精度和可靠性。
超宽带;自主完好性监测;非视距;异常测距值
0 引言
随着科技高速发展,导航定位向着更精确、更可靠的方向发展,室内定位技术也随之发展成为导航定位的重要研究方向。超宽带(ultra wide band,UWB)定位技术采用了极低的功率谱密度、非正弦波极窄脉冲作为其通信信号,具有高时间分辨率、穿透性强等特点,在室内定位领域广泛应用。与其他室内定位技术相比较,UWB定位技术的优势在于测距定位精度更高、稳定性更强[1-3]。UWB定位技术在视距(line of sight,LOS)环境下可提供厘米级甚至更高的测距定位精度。随着UWB芯片手机端的植入,进一步推动了UWB的商业化,同时也使其成为了被广泛关注的研究热点。
UWB在实际的测量应用过程易受到非视距(non line of sight, NLOS)、多路径效应以及环境等因素影响,造成较大粗差[4-5],实测数据经常存在异常测距值干扰,导致UWB系统定位精度与可靠性降低。在不考虑多路径效应的情况下,NLOS误差是UWB定位解算的主要误差。针对NLOS误差的处理方法,主要分为抗差滤波处理方法和数据信号特征鉴别方法两类。在抗差滤波处理方面,文献[6]提出使用有色噪声自适应卡尔曼滤波的算法,效果明显但算法复杂、计算量大;文献[7]提出了较为经典的自适应抗差算法抑制消除NLOS误差。在数据信号特征鉴别方面,文献[8]提出了基于信号强度的NLOS识别方法,根据接收信号特征分析识别NLOS,该方法识别效果明显,适用范围广,但该方法需要事先对NLOS和LOS样本观察提取先验特征,工作量较大;文献[9]直接从信号中提取特征参数,利用最小二乘支持向量机进行NLOS识别,该方法复杂度较高、所需时间成本较高。抗差滤波处理方法对NLOS误差大多只是起到削弱限制作用难以完全剔除,数据信号特征鉴别方法从原始数据出发更为直接准确,但算法复杂度较高。因此,有必要设计更加准确实用的NLOS误差鉴别抑制方法。接收端自主完好性监测(receiver autonomous integrity monitoring, RAIM)方法根据接收端冗余信息一致性对故障数据进行监测,并从原始数据对故障数据进行直接剔除,在原始数据监测方面取得良好效果,结合UWB测距误差特点,理论上该方法可应用于UWB NLOS及粗差等异常测距值的监测剔除。目前RAIM方法主要应用在全球卫星导航系统(global navigation satellite system,GNSS)领域。文献[10]根据接收端冗余信息一致性检验进行系统完好性监测,基于卡方分布的全局检验方法可以有效鉴别数据中的故障,基于标准正态分布检验的数据探测方法可以进行故障定位,提高定位精度及可靠性的同时提高有效数据利用率;文献[11]提出单系统及多系统组合完好性分析,在RAIM的基础上对其性能及可用性做了详细分析,提高系统检测性能及可靠性。
综合以上分析,本文提出一种UWB定位系统自主完好性监测方法,将自主完好性监测理论应用于UWB NLOS及粗差等异常测距值的监测与剔除,并将该方法的数据处理结果与其他经典方法进行比较分析。
1 UWB定位模型
UWB测距模式主要有基于接收信号强度、基于信号到达时间、基于信号到达时间差、基于信号到达角度和信号双向传播时间(tow way-time of flight, TW-TOF)的定位模式[12-13]。TW-TOF测距模式是基于测量UWB脉冲信号在基准站和流动站间的双向飞行时间间接完成测距,不需要基准站和流动站时间同步[14]。本文选用TW-TOF测距模式。
1.1 状态模型



1.2 量测模型
由于具体试验条件等限制,本文研究主要针对不跨楼层场景,所以对UWB平面定位解算进行研究,计算过程中需要将TW-TOF测距值斜距转化
为平距,其计算公式为

UWB定位观测方程为

UWB流动站和基准站间的真实平距为


所以
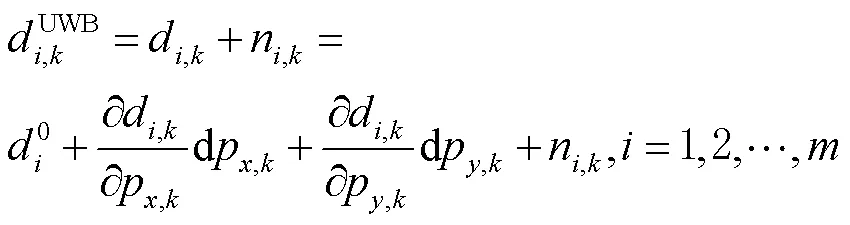
UWB定位线性方程为

2 UWB定位系统自主完好性监测方法
UWB定位系统自主完好性监测方法是根据观测值冗余度,对观测值的故障情况进行监测的接收端自主完好性监测方法,主要分为全局检验和故障定位两部分,在原始观测值基础上剔除异常测距值,再进行扩展卡尔曼滤波解算。
2.1 全局检验模型
根据式(9)UWB定位线性量测方程,利用最小二乘法求解位置参数[15]为


残差平方和为

2.2 故障定位模型



通过故障定位在原始数据中剔除存在异常的测距值,剔除后的数据重新构成观测值数组,进行式(4)至式(9)量测模型构建过程,再进行扩展卡尔曼滤波定位解算。
关于数理统计假设检验的相关阈值选取,考虑误警率的同时要结合实际情况适当调整阈值,要特别注意定位解算过程中每个历元内基站数量不同导致卡方分布的自由度不同对阈值选取的影响。
通过上述过程,可以完成UWB定位系统的自主完好性监测过程,实现对UWB测距值中的异常测距值进行监测剔除,提高UWB定位系统精度和可靠性。UWB定位系统的自主完好性监测方法主要流程如图1所示。
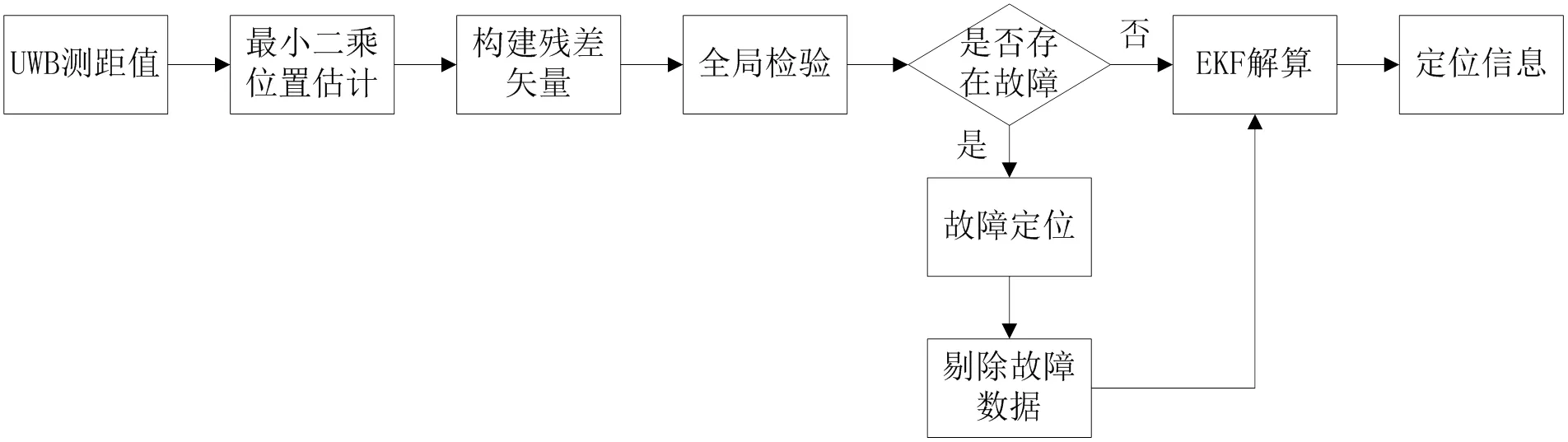
图1 UWB定位系统的自主完好性监测方法主要流程图
3 实验与分析
为了对上述方法进行验证分析,设计了一组实验,由于采用GNSS/惯性导航系统(inertial navigation system, INS)组合定位系统作为定位轨迹参考,因此实验场景选在室外。在实验中,UWB数据采集采用时域(Time Domain)公司的Pulson410模块,数据采样频率2 Hz;利用迈普时空公司商用组合导航系统提供参考轨迹,该组合导航产品内置专业性GNSS板卡、GNSS授时系统,可以完成GNSS对电脑精确授时,并且可提供平面精度2 cm的参考轨迹;用徕卡(Leica)TS09全站仪建立UWB定位独立坐标系,其精度(1.5 mm+2×10-6×),为全站仪所测距离。利用其测量UWB基站位置并认为基站坐标不含误差。实验场景和实验平台如图2所示。

图2 实验场景及实验平台
将UWB模块、组合导航系统分别固定在稳定的实验台上,UWB时间系统是基于电脑时间,利用组合导航系统对电脑授时,保证组合导航系统与UWB数据时间同步。
目前扩展卡尔曼滤波(extended Kalman filter, EKF)是定位解算的基本方法。自适应抗差卡尔曼滤波(adaptive robust extended Kalman filter, AREKF)是针对UWB测距值中含有的NLOS误差等异常测距值,提出的较为经典的误差抑制方法。为了验证本文设计的UWB定位系统自主完好性监测方法的性能和效果,将EKF定位解算方法、文献[8]所提出AREKF定位解算方法与本文方法(EKF+RAIM)进行对比验证。

图3 基站布设及小车参考轨迹
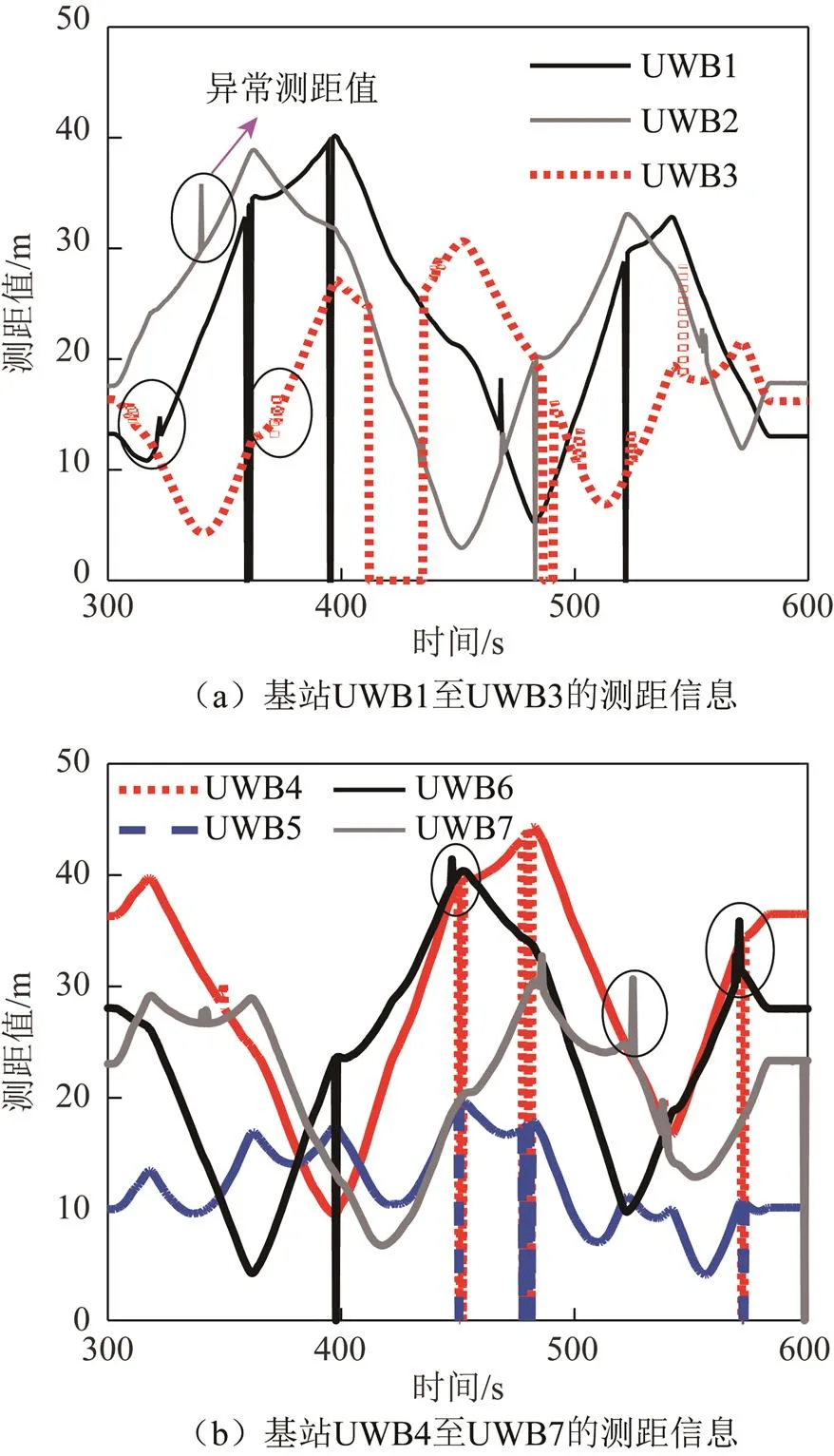
图4 UWB测距值分析
在测距信息中存在异常值的情况下,定位解算的精度和稳定性明显下降,EKF和EKF+RAIM方法解算轨迹对比结果如图5、图6所示。参考轨迹用Ref表示,由组合导航系统解算结果采用高频率输出提供,采用拟合插值的方式与UWB解算轨迹进行匹配,获得误差分布图,东向误差和北向误差如图7、图8所示,平面误差分布如图9所示。
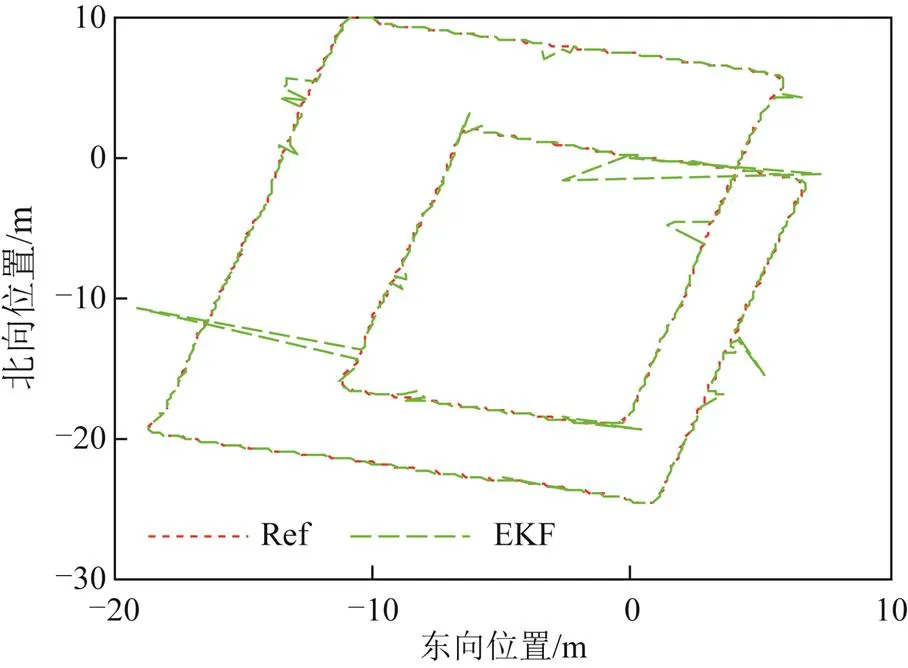
图5 EKF解算平面轨迹

图6 EKF+ RAIM解算平面轨迹
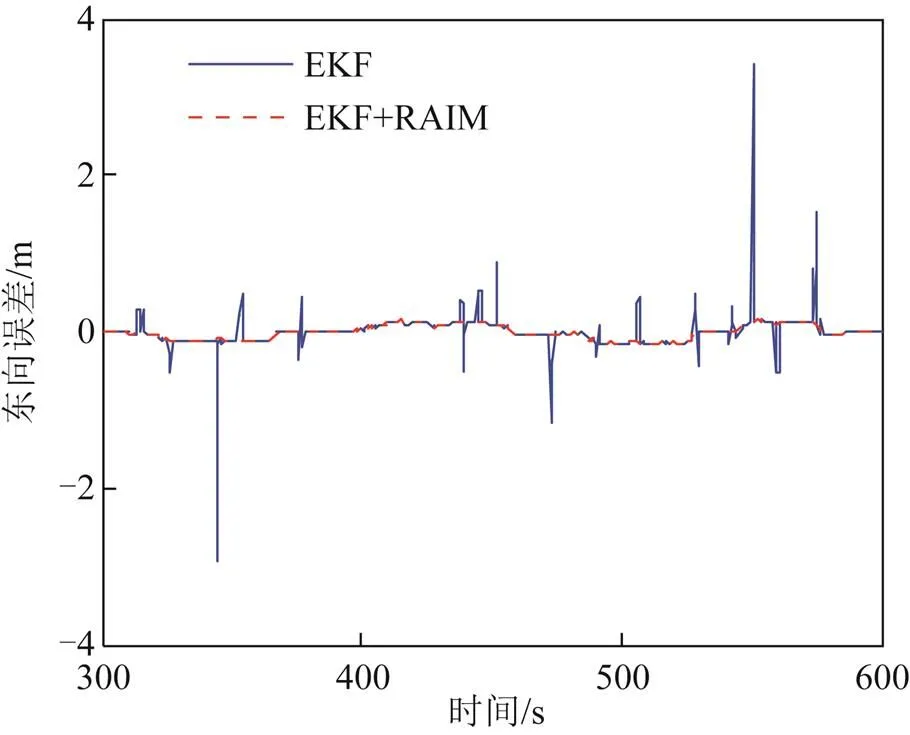
图7 东向误差
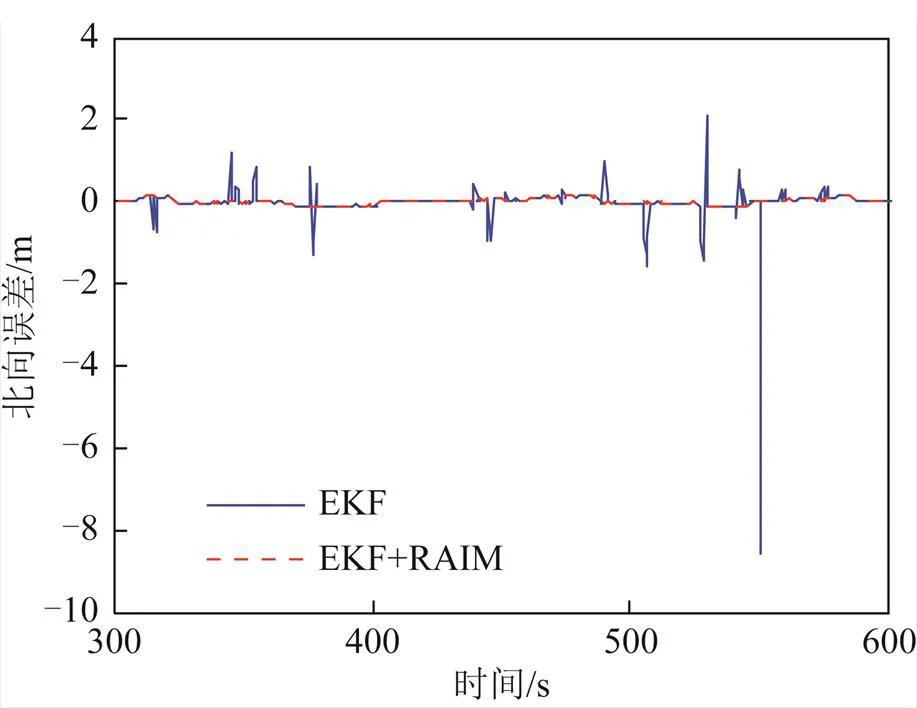
图8 北向误差

图9 EKF和EKF+RAIM平面误差
AREKF和EKF+RAIM方法解算轨迹对比如图10所示,在轨迹对比图中多处区域EKF+RAIM解算轨迹和参考轨迹符合的要优于AREKF解算轨迹,例如图中黑色椭圆标注处,误差分布如图11所示,平面误差分布如图12所示。

图10 AREKF和EKF+RAIM解算轨迹
对3种方法的解算结果均方根误差(root mean square error,RMSE)和最大误差(maximum error,MAX)进行统计如表1所示。
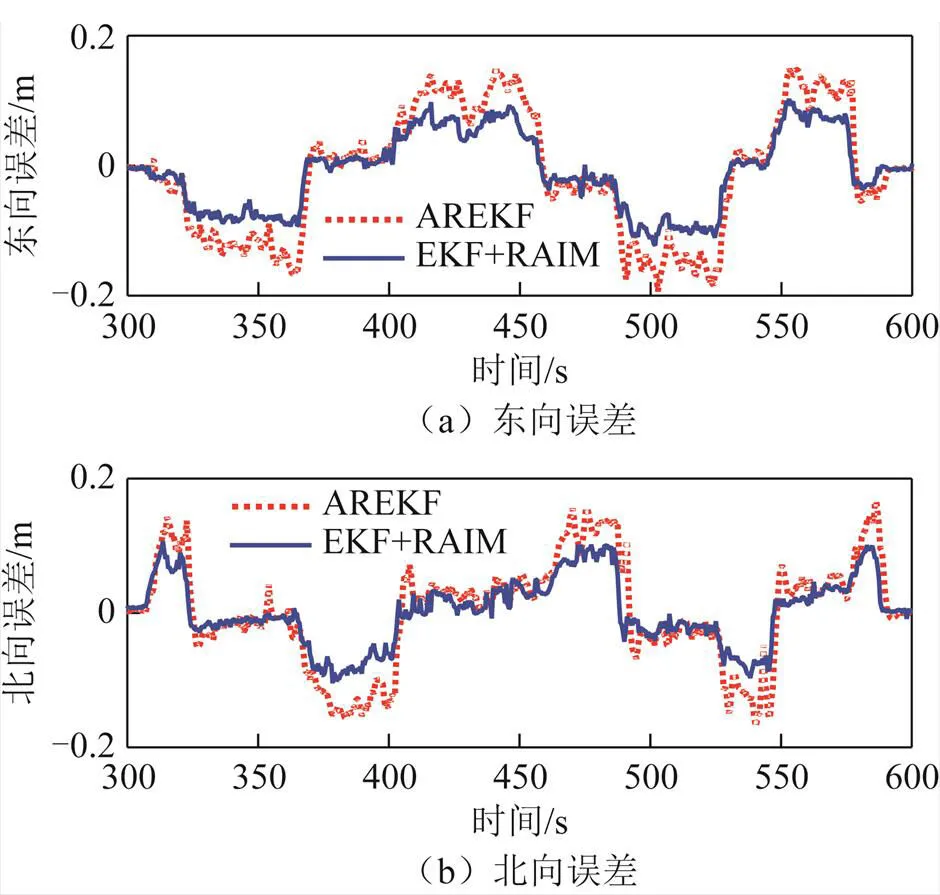
图11 误差分布
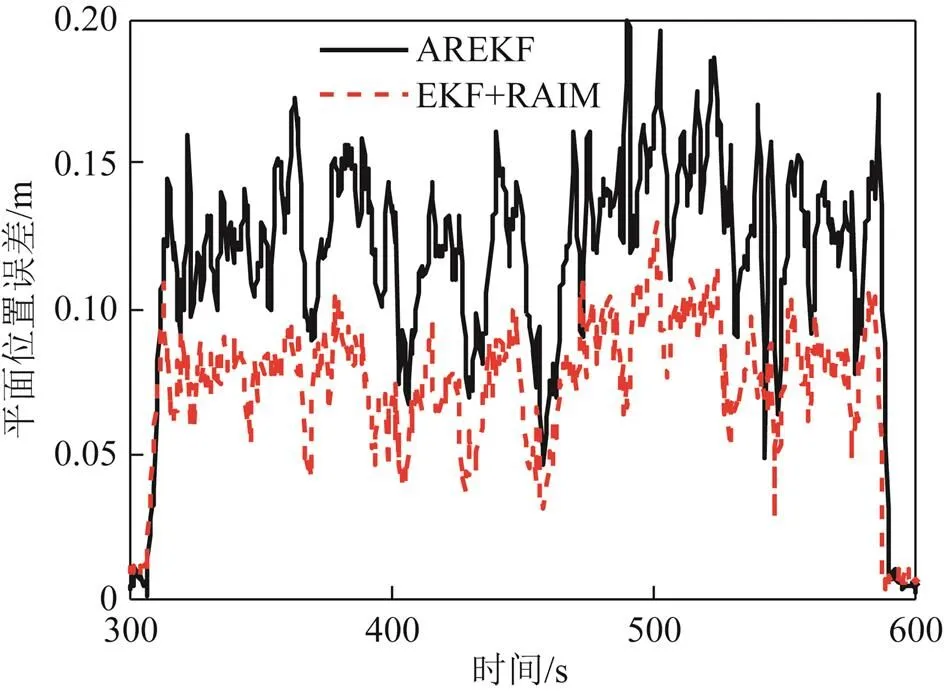
图12 AREKF和EKF+RAIM平面误差
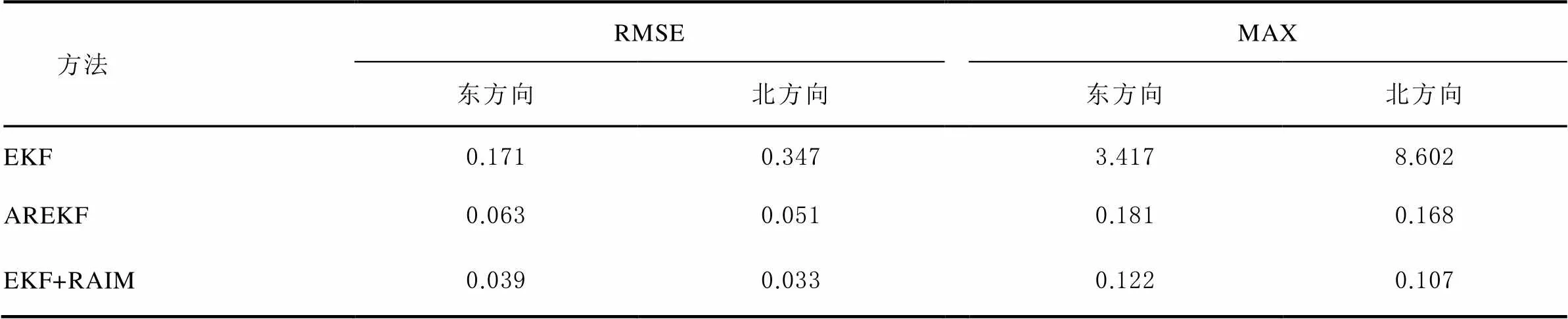
表1 UWB解算误差统计 单位:m
通过以上实验结果和误差分析结果可得:①与扩展卡尔曼滤波方法相比,本文方法的东、北方向均方根误差分别由0.171、0.347 m降低到0.039、0.033 m,东方向最大误差由3.417 m降低至0.122 m,北方向最大误差也由8.602 m降低至0.107 m;从平面位置误差分布来看,误差峰值和出现尖刺比率都明显降低,定位精度和稳定性有大幅度提升。②与经典的自适应抗差卡尔曼滤波定位解算方法相比,在东、北方向均方根误差分别由0.063、0.051 m降低到0.039、0.033m,东方向最大误差由0.181 m降低至0.122 m,北方向最大误差也由0.168 m降低至0.107 m;平面误差分布峰值有一定降低,在自适应抗差卡尔曼滤波定位解算方法基础上进一步提升系统定位精度和稳定性。
4 结束语
UWB以其距离分辨率高和抗干扰能力强等特点,在室内定位中优势明显。UWB原始数据中包含的粗差、NLOS误差等异常测距值严重影响UWB定位系统的精度和可靠性。针对该问题,本文设计了UWB定位系统自主完好性监测方法,监测剔除UWB测距值中的异常值。该方法通过最小二乘位置估计获得距离残差,根据残差构建检验因子,采用基于数理统计的卡方检验进行全局检验,采用标准正态分布检验方法进行故障定位,从而剔除存在异常的UWB数据,完成对UWB测距值故障情况的监测和定位。剔除后的数据采用扩展卡尔曼滤波定位解算。利用实验对本文方法与扩展卡尔曼滤波定位解算方法、经典的自适应抗差卡尔曼滤波定位解算方法进行对比,结果表明,本文UWB定位系统自主完好性监测方法对UWB数据中含有的异常测距信息有较好的监测、剔除能力,对提升UWB定位解算精度和可靠性效果明显。
[1] 徐哲超, 冯晔. 基于TOA/AOA的UWB室内定位NLOS识别研究[C]//中国卫星导航系统管理办公室学术交流中心. 第十一届中国卫星导航年会论文集: S02导航与位置服务. 北京: 中国卫星导航系统管理办公室学术交流中心, 2020.
[2] 张媛, 缪相林, 王梅, 等. UWB测距室内定位算法误差分析[J]. 导航定位学报, 2020, 8(6): 132-136.
[3] 闫大禹, 宋伟, 王旭丹, 等. 国内室内定位技术发展现状综述[J]. 导航定位学报, 2019, 7(4): 5-12.
[4] ALARIFI A, AL-SALMAN A, ALSALEH M, et al. Ultra wideband indoor positioning technologies: analysis and recent advances[J]. Sensors, 2016, 16(5): 1-36.
[5] LI B H, ZHAO K, EDUARDO B S. A UWB-based indoor positioning system employing neural networks[J]. Journal of Geovisualization and Spatial Analysis, 2020, 4(2): 1-9.
[6] 李奇越, 吴忠, 黎洁, 等. 基于改进卡尔曼滤波的NLOS误差消除算法[J]. 电子测量与仪器学报, 2015, 29(10): 1513-1519.
[7] 刘韬, 徐爱功, 隋心. 自适应抗差KF-UKF的超宽带导航定位方法[J]. 测绘科学, 2017, 42(12): 104-111.
[8] XIAO Z L, WEN H K, MARKHAM A. Identification and mitigation of non-line-of-sight conditions using received signal strength[C]//The institute of Electrical and Electronic Engineers(IEEE). Proceedings of International Conference on Wireless and Mobile Computing, Networking and Communications. Lyon, France: IEEE, 2013: 667-674.
[9] MARANÒ S, GIFFORD W M, WYMEERSCH H, et al. NLOS identification and mitigation for localization based on UWB experimental data[J]. IEEE Journal on Selected Areas in Communications, 2010, 28(7): 1026-1035.
[10] 王尔申, 杨福霞, 贾超颖, 等. 基于加权最小二乘法的RAIM算法研究[J]. 电光与控制, 2017, 24(11): 7-10.
[11] 赵昂, 杨元喜, 许扬胤, 等. GNSS单系统及多系统组合完好性分析[J]. 武汉大学学报(信息科学版), 2020, 45(1): 72-80.
[12] 王卿, 蔚保国. 基于非合作室内环境的超宽带无中心组网定位[J]. 河北科技大学学报, 2021, 42(1): 8-14.
[13] 董家志. 基于UWB的室内定位与跟踪算法研究[D]. 成都: 电子科技大学, 2015.
[14] 徐爱功, 刘韬, 隋心, 等. UWB/INS紧组合的室内定位定姿方法[J]. 导航定位学报, 2017, 5(2): 14-19.
[15] 葛君霞, 胡永辉, 侯雷, 等. 多星座组合RAIM算法研究[J]. 时间频率学报, 2014, 37(3): 181-189.
[16] 吴有龙, 王晓鸣, 杨玲, 等. GNSS/INS紧组合导航系统自主完好性监测分析[J]. 测绘学报, 2014, 43(8): 786-795.
An autonomous integrity monitoring method of UWB positioning system
XU Aigong, SHI Zhengxu, GAO Song, WANG Changqiang
(School of Geomatics, Liaoning Technical University, Fuxin , Liaoning 123000, China)
Aiming at the issue of the accuracy and reliability of Ultra Wide Band (UWB) positioning system are severely affected by the gross errors and Non Line of Sight (NLOS) errors covered in UWB outliers, an autonomous integrity monitoring method of UWB positioning system was proposed. The proposed method adopted chi-square global test and standard normal test which were based on mathematical statistics theory to conduct fault positioning. Meanwhile, the test statistic was established by using the residual errors of observed values of each base, and the detection threshold was obtained from the false alarm rate and the probability density function. Comparing the test statistics with the test threshold, abnormal observation were inspected, located and monitored for eliminating the impact of UWB outliers. Experimental results showed that the proposed method could effectively eliminate the abnormal values of ranging, and improve the accuracy and reliability of the UWB positioning system.
ultra wide band; autonomous integrity monitoring; non line of sight; outliers
P228
A
2095-4999(2021)06-0009-07
徐爱功,史政旭,高嵩,等. 一种UWB定位系统自主完好性监测方法[J]. 导航定位学报, 2021, 9(6): 9-15.(XU Aigong, SHI Zhengxu, GAO Song, et al. An autonomous integrity monitoring method of UWB positioning system[J]. Journal of Navigation and Positioning, 2021, 9(6): 9-15.)
10.16547/j.cnki.10-1096.20210602.
2021-01-26
国家自然科学基金项目(42074012);辽宁省重点研发计划项目(2020JH2/10100044);辽宁省自然科学基金计划指导计划项目(2019-ZD-0051);辽宁省教育厅基础研究项目(LJ2020JCL016)。
徐爱功(1963—),男,山东日照人,博士,教授,研究方向为全球卫星定位系统、地理信息系统及智能交通系统的集成与应用。
史政旭(1995—),男,辽宁阜新人,硕士研究生,研究方向为室内外导航定位。
猜你喜欢
科学(2020年3期)2020-01-06 04:02:51
北京航空航天大学学报(2017年9期)2017-12-18 07:12:25
电子制作(2017年7期)2017-06-05 09:36:13
测绘科学与工程(2017年1期)2017-05-04 03:40:44
电源技术(2016年9期)2016-02-27 09:05:39
地理与地理信息科学(2015年4期)2015-10-13 08:29:15
电源技术(2015年1期)2015-08-22 11:16:28
电力建设(2015年2期)2015-07-12 14:15:59
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01 02:53:55
太空探索(2014年1期)2014-07-10 13:41:50