
基于可穿戴惯性传感器的跌倒预先识别方法*
2021-12-01 14:20余维维牛同锋高梦婷
计算机与数字工程 2021年11期
余维维 姚 俊 牛同锋 屈 纯 高梦婷
(1.湖北航天化学技术研究所 襄阳 441003)(2.航天化学动力技术重点实验室 襄阳 441003)(3.湖北省应急救生与安全防护重点实验室 襄阳 441003)
1 引言
跌倒是老年人伤残、失能和死亡的主要原因,且是65岁以上老人死亡的首因[1]。截止2018年末,我国60岁以上老年人口达24949万人,占总人口的17.9%[2]。为保障老人健康,针对老人,尤其是独居老人,作跌倒安全防护成为迫切需求。
传统的跌倒识别[3~5]是一种跌倒事后检测,以自动向监护人报警为目的,虽可减少伤者送医时间,但不能防止或减轻跌倒伤害。类似于车载安全气囊,跌倒防护气囊可在发生跌倒碰撞前预先识别,并通过气体发生器快速产生气体充满气囊,防止跌倒对老人髋关节和后脑造成严重伤害。惯性传感器(加速度计和/或陀螺仪)体积小,价格便宜,对穿戴者影响小,适合应用于穿戴式跌倒防护设备[6]。国内外学者基于此提出了多种跌倒预先识别方法。Tamura[7]等通过直接设定传感器输出的加速度和角速度阈值实现跌倒预先识别和气囊防护,但准确率只有81.8%。为提高准确率,更多研究者通过提取特征后再进行识别。钟志超[8]通过竖直方向的速度和位移特征设定阈值,取得了94.4%的准确率,但在跳跃和下蹲时存在误报;Ahn[9]等通过提取合加速度、合角速度、倾角等特征设置联合阈值,取得了100%的敏感度,但特异度只有83.9%。Shi[10]等利用SVM二分类实现跌倒预先识别和气囊防护系统的设计,但没有考虑防护气囊实际应用时,跌倒方向的识别问题。跌倒防护主要是针对侧向和后向的跌倒,对于前向跌倒和日常活动,若气囊展开,会导致浪费气体发生器和给穿戴者造成不便等问题,这严重影响产品的适用性,使其长期停滞在实验研究阶段。因此,识别跌倒方向和保证高准确率对跌倒防护产品尤为重要。
针对阈值法预先识别跌倒准确率不够高,SVM二分类不能识别跌倒方向,难以满足跌倒防护产品的适用性要求,本文提出一种结合阈值和SVM多分类的跌倒预先识别方法。
2 数据采集和特征提取
2.1 数据采集
跌倒数据采集系统主要由MEMS传感器(ICM20689)、微控制器(STM32F410)、供电单元(3.7V锂电池)和存储单元组成。为获取较稳定的动作数据,同时减少对人体活动的影响,本文将数据采集模块固定于志愿者的腰部。数据采集系统及载体坐标系方向如图1所示。

图1 数据采集系统及载体坐标系方向
传感器ICM20689含加速度计、陀螺仪和DMP,加速度计输出三轴加速度:ax,ay,az;陀螺仪输出三轴角速度:wx,wy,wz;DMP输出实时规范化四元数:q0,q1,q2,q3。采样频率为200Hz,根据数据幅值,加速度计和陀螺仪设定测量范围:±4g(g=9.8m/s2),±250°/s。
因老人采集跌倒数据存在危险性,由12名身体无平衡障碍疾病的志愿者模拟老人动作采集,其中跌倒动作的模拟是志愿者站立于易滑动的工装上,由辅助人员拉动工装使志愿者失衡跌倒在约20cm厚的护垫上。采集过程如图2所示。
图2 数据提取过程
样本动作类型及说明如表1所示,累计获得样本375份,其中日常动作231份,跌倒144份。
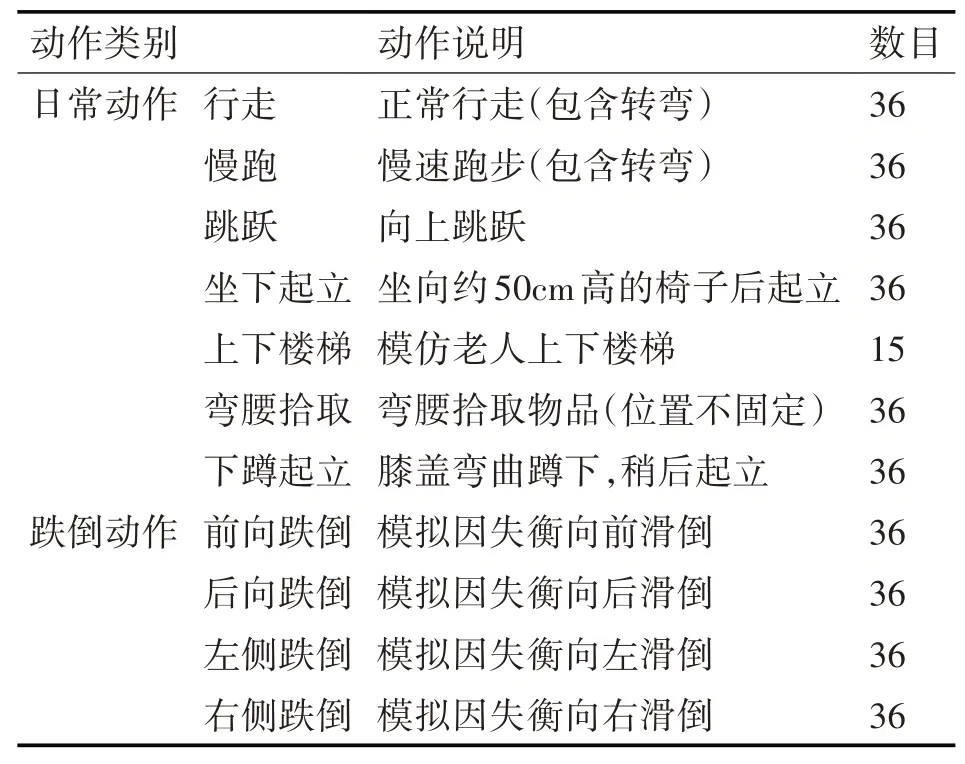
表1 动作类型及说明
2.2 特征提取
人体活动的频率基本不超过20Hz,98%的人体活动频率不会超过10Hz[11]。为降低噪声信号干扰,在所有样本数据采集完成后,通过截止频率为8Hz的Butterworth滤波处理消除原始信号的高频分量来平滑数据。
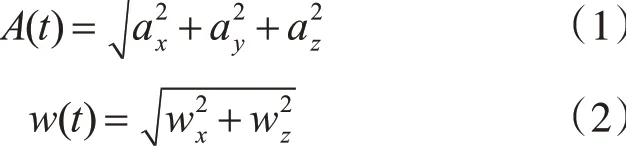
人体在跌倒前出现失重和倾斜是最明显的特征。合加速度和合角速度可反映人体当前活动剧烈程度,姿态角可反映人体当前活动偏移正常姿态的程度。但人体转弯时,wy的变化会对识别造成干扰,故只提取水平合角速度,姿态角只提取横滚角(roll)和俯仰角(pitch)。
由于人体传感器输出的数据是基于载体坐标系的,要获得人体姿态角,需要经姿态解算将载体坐标系下的数据转换到导航坐标系下[12]。姿态转换矩阵为

由姿态转换矩阵,根据式(3)和式(4)可求得各时刻的姿态角,其中横滚角还需根据表2取真值。

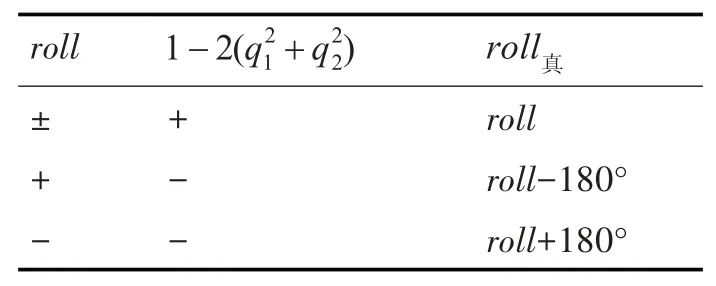
表2 横滚角真值表
以部分日常动作和跌倒动作为代表,提取特征的数据曲线如图3所示。图3中跌倒和日常动作曲线的特征变化差异明显,说明提取的特征用于跌倒预先识别有效。图3(c)和3(d)不同方向跌倒动作的姿态角变化明显不同,说明利用SVM多分类来识别跌倒方向可行。


图3 部分动作的特征曲线
3 方法
3.1 疑似跌倒预先识别方法
人体跌倒触地前身体会有跌倒趋势,提取的特征会达到某个阈值,而日常动作通常只是部分特征值达到阈值,故可通过设置阈值初步预先识别跌倒和日常动作。如图3(a)坐下起立会出现类似跌倒的明显失重(小于0.7g),但水平合角速度和倾角变化却很小;图3(b)弯腰阶段的角度和角速度都比较类似前向跌倒,但合加速度没有明显失重(小于0.7g)。根据跌倒触地碰撞前的特征变化范围和日常动作的特征变化范围,本文设置的特征阈值如表3所示。

表3 疑似跌倒检测设定的阈值
样本通过阈值检测的条件如下:
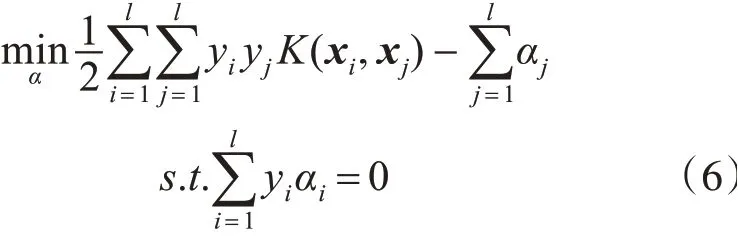
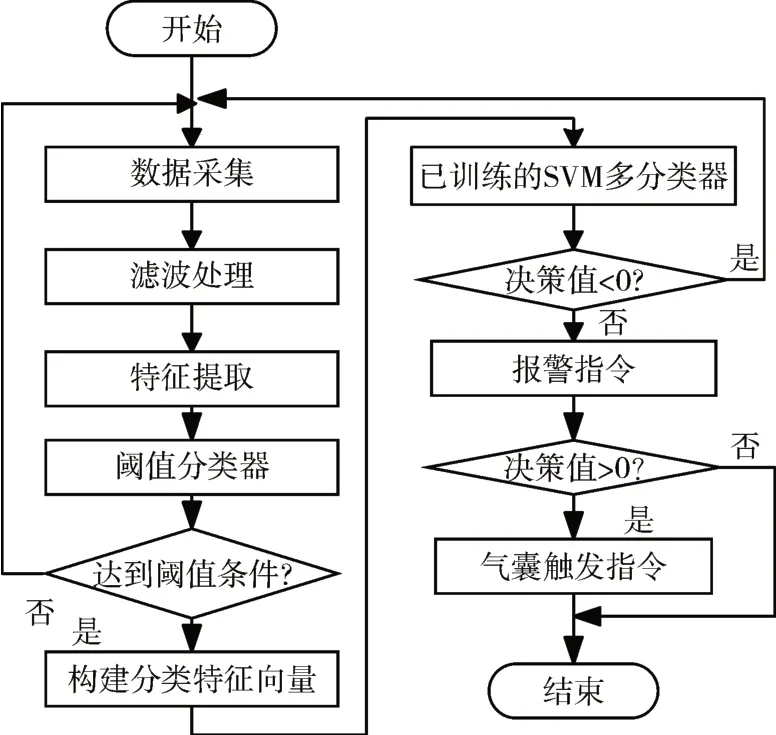
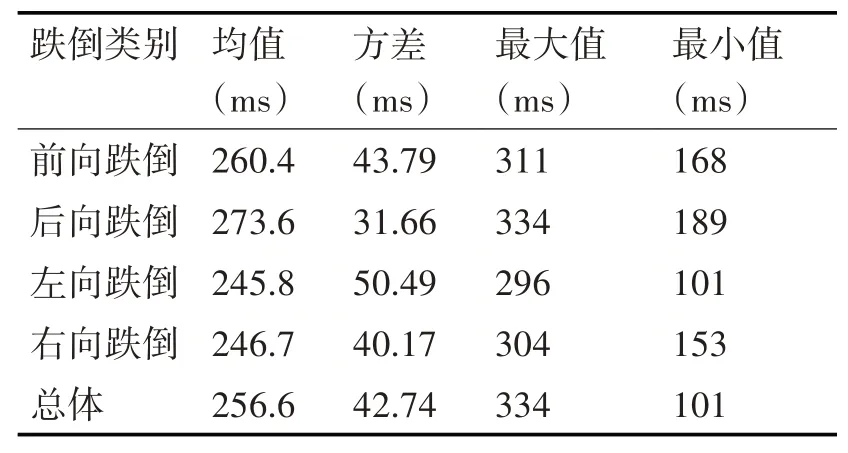
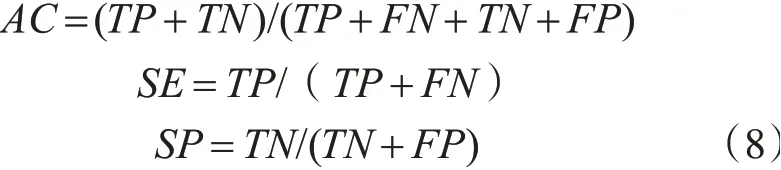
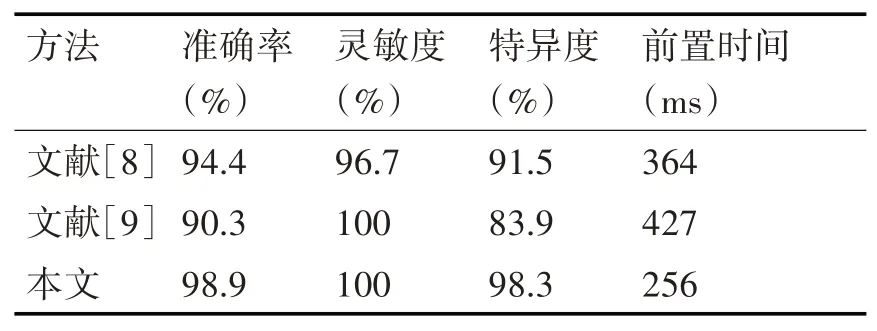
1)合加速度小于阈值:a(t) 2)水平合角速度大于阈值:w(t)>Wth; 若样本在某时刻同时满足三个阈值条件,则判定为疑似跌倒。 跌倒防护产品最重要的是不会漏报跌倒,为保证所有的跌倒动作通过检测,表3设置的阈值偏低,会导致误报率上升,需通过SVM分类器进行复检。 3.2.1 构建SVM分类特征向量 为提升预先识别准确率,通过定长时间窗提取连续数据流构建分类特征向量用于SVM分类。窗口长度会直接影响算法识别性能,而前置时间决定了防护气囊能否在跌倒碰撞前充气展开,Aziz[13]等具体研究了窗口长度和前置时间对SVM方法预先识别跌倒的影响效果。本文预定的前置时间为200ms~300ms,根据文献[13]的研究结果取窗口长度0.2s,对训练集的跌倒样本根据前置时间取失重段的数据流构建分类特征向量,如图4所示。日常动作样本不存在前置时间,则以同样长度的时间窗提取其类似跌倒过程的数据流构建分类特征向量,目的是通过易导致误报的数据来训练分类器,降低误报率。 时间窗口数据记为[Fi-n+1,…,Fi-1,Fi],式中Fi为第i次采样的特征值。对窗口内的合加速度、水平合角速度、横滚角、俯仰角分别求均值、范围、方差,构建样本的分类特征向量[x1,…,x12]。 将构建的分类特征向量根据样本类别手动添加标签:日常动作为{-1},前、后、左、右方向跌倒分别为{0,1,2,3},用于后续SVM分类器的训练及测试结果的正确率统计。 3.2.2 构建SVM多分类器 跌倒样本是非线性可分的,设有两类训练样本集:(xi,yi),式中xi为样本特征向量,yi∈{+1,-1},i=1,…,l,l为样本个数。SVM处理非线性二分类问题主要原理[14]简述如下:通过核函数K(xi,xj)将输入的特征向量映射到高维空间,并求解最优分类超平面使不同样本分类间隔最大化。最优分类面的求解,可归为求解优化问题: 将预处理后的样本特征向量代入决策函数计算,即可获得样本预测类别。但以上SVM二分类仅可识别跌倒和日常动作,不能实现多分类,通过“一对一”方式构造SVM多分类器,并采用“最多获胜投票法”(Max-Wins Voting)给出最终决策值。算法原理图如图5。 3.2.3 SVM多分类器参数寻优 碧流河水库配有主空气压缩机2台,其中一台作为备用;副空气压缩机1台,其工作状态为间歇式,即在主空气压缩机停止输气时,由副空气压缩机(气泵)向管内补充气压,使系统内气压保持在0.01~0.05 MPa之间,确保管路系统始终处于有压状态,以防止管内产生冰阻现象。还需设置储气罐1个,起到缓冲气压作用;气液分离器1个,起到净化空气作用。 SVM分类的效果主要决定于惩罚因子C和核函数参数γ[15]。然而随机参数值不能保证SVM的识别效果,采用网格搜索再交叉验证的方法对参数C和γ进行寻优。具体步骤如下。 1)选取训练集:将预处理后的各类跌倒动作和日常动作样本分别取50%用于训练。 2)设置参数的搜索范围和步长。范围设置:C∈[2-10,210],γ∈[2-10,210];步 长 设 置:C_step=0.4,γ_step=0.4。 3)对训练集采用5重交叉验证,并计算分类正确率,求得最高分类准确率对应的参数对[Cbest,γbest],并将其作为SVM多分类器的参数,用于测试集样本。 本文预先识别方法的流程如图6所示,先对样本数据滤波并提取特征,若样本通过阈值检测被判定疑似跌倒,则从该时刻开始,调用已训练的SVM多分类器对样本进行复检,降低误报并识别跌倒方向。并且疑似跌倒时才调用SVM算法,避免了不间断地调用滑动窗口进行运算,可降低单片机功耗。 图6 预先识别方法流程图 跌倒防护系统根据预测的样本类别(SVM输出的决策值:-1,0,1,2,3)作相应反馈,实现侧向和后向跌倒才触发气囊,前向跌倒仅发出报警,提升跌倒防护产品适用性。 为了验证方法的有效性,取训练SVM分类器余下的50%样本(72个跌倒和115个非跌倒)用于测试实验。测试集样本的识别结果如图7所示。 图7 测试集识别结果 前置时间统计结果(不含被误报的两个非跌倒样本数据)如表4所示。 表4 各类型跌倒识别的前置时间 为量化评价算法的识别效果,引入准确率(AC)、敏感度(SE)和特异度(SP)作为评估标准[9]。 式中:TP表示跌倒被正确识别,FN表示跌倒被误判,TN表示日常动作被正确识别,FP表示日常动作被误判。根据测试集识别结果按式(8)计算评估标准,并和相关文献的方法比较,结果如表5。 表5 本文和相关文献方法性能比较 根据测试结果,通过分析和对比可以发现:从图7可看出测试集中所有跌倒样本及13个非跌倒样本通过了疑似跌倒检测,说明设置的阈值可保证对跌倒行为无漏报,但存在较高误报。SVM多分类对误报的13个日常样本修正了11个,仅剩两个样本仍被误判为前向跌倒,说明二级检测可有效降低误报。SVM多分类对跌倒动作没有误判,说明该方法对跌倒动作及其方向的判别有效。从表5来看,相较于文献[8]和文献[9]方法,本文在准确率和特异度上都有明显提升,降低了误报率,但前置时间分别延迟了108ms和171ms;常温状态下,目前的气体发生器技术在120ms左右即可充满容积10L的防护气囊,方法平均前置时间为256ms,实时性可以满足要求。 实验结果证明:本文方法可提前256ms较准确地识别跌倒行为及其方向。该方法兼具跌倒方向识别、高准确率和低功耗的特点,可提升跌倒防护产品的适用性,具有较好的应用前景。接下来的工作是将方法移植到嵌入式系统,结合快速充气、防护气囊等模块实现跌倒预先识别和防护。3.2 跌倒预先识别复检方法


3.3 小结
4 结果及讨论

5 结语
猜你喜欢
九江职业技术学院学报(2022年1期)2022-12-02
北京航空航天大学学报(2022年5期)2022-06-06
保定学院学报(2022年2期)2022-04-07
煤气与热力(2021年12期)2022-01-19
有色设备(2021年4期)2021-03-16
南方周末(2019-03-07)2019-03-07
数学学习与研究(2018年15期)2018-11-12
中国汽车界(2016年1期)2016-07-18
学苑创造·C版(2015年9期)2015-11-26
