仓储机器人电池储能系统设计与仿真
2021-11-20 15:16:32刘正春杨炜红舒国明
电源技术 2021年9期
刘正春,李 杰,杨炜红,舒国明,王 俊
(1.陆军工程大学,河北石家庄 050003;2.河北交通职业技术学院,河北 石家庄 050003)
目前大多仓储机器人都采用电池储能系统供电,而随着仓储机器人应用越来越广泛,其设计也越来越向灵活性、便捷性和轻量化发展。仓储机器人在搬运货物过程中消耗的大量能量都来源于电池储能系统[1-2],因此,电池系统的供电性能、质量、体积直接影响到整个机器人的设计。机器人常用的电池类型主要有铅酸电池和锂电池。锂离子电池具有质量轻、储能大、无污染、无记忆效应、使用寿命长等突出优点。当前市面上机器人设计使用率最高的锂电池主要有磷酸铁锂电池[2-3],其具有更高的安全性、更长的使用寿命、不含任何重金属和稀有金属(原材料成本低)、支持快速充电、工作温度范围广、绿色环保[2-5]的优点,但也存在一些缺陷。三元锂电池是指使用镍钴锰作为正极材料,石墨作为负极材料的锂电池,其电压平台高,比能量、比功率大。此外,在大倍率充电和耐低温性能等方面,三元锂电池也有很大的优势[6]。
本文针对某型仓储机器人的特定性能要求,采用N21700CB-50 型三元锂电芯对机器人电池系统进行设计。基于室内室外工作的特殊需求,将电池系统设计为2 个独立可分离的电池模块,同时构造三元锂电芯的二阶RC 电路等效模型和数学模型,基于实测数据对模型参数进行辨识,并进一步建立机器人的电池组、负荷(主要关节电机)以及整个源载系统的Matlab/Simulink 仿真模型。模型仿真在对电池系统设计可行性进行验证的基础上,还讨论了不同环境温度对电池系统动态特性的影响。
1 结构设计
1.1 设计依据
要求该仓储机器人手臂最大抓取质量为2 kg,设计其机械臂为6个自由度,臂身自重为15 kg,各关节电机选型及参数如表1所示,各电机额定电压均为24 V。电机启动瞬时电流为额定电流的2~3倍,故其瞬时功率也应为其平均功率的2~3倍[7-10]。

表1 仓储机器人机械臂电机参数表
通过计算分析,得出该型仓储机器人储能电池的工作性能要求为:输出电压Udc=24 V,平均功率Pave≥231.5 W (Iave≥9.65 A),瞬时功率Pmax≥463 W (Imax≥19.3 A);在室内工作时,工作时间tw≥4 h(电池能量Ez≥926 Wh),充电时间tc≤1 h,在室外工作时,工作时间tw≥2 h(电池能量Ez≥463 Wh),充电时间tc≤0.5 h;工作环境温度为-20~45 ℃(考虑室外作业)。
依据上述性能需求,电池采用模块化设计,设计为2 组独立、结构相同的电池组:室内工作时,采用2 组电池组并联;室外工作时,只需用1 组即可。
1.2 电池模块设计
考虑室外环境温度(-20~45 ℃)对电池特性的影响较大,并且为了降低机器人电源质量,本文选用目前市场最新的、能量密度更高的N21700CB-50 型三元锂电池,其标称电压U0为3.6 V,充放电电压范围为2.5~4.2 V,典型容量Q0为5 000 mAh@0.2C,最大充电电流为3C(25 ℃),最大放电电流为1C(25 ℃)。基于此,设计电池组,使其满足1.1 节中的电源性能要求。
通过电芯串联,满足机器人电机电压要求,得到电芯串联个数:

通过电芯并联,满足机器人功率和能量要求,得到电芯总并联数:

取Npz=10,鉴于机器人的应用场合不同,采用模块化设计,将该电池组设计成2 个结构相同、独立分离的电池模块,每个电池模块的并联数为:

得到每个电池模块7 串5 并的设计结构,电池组为2 个可分离的独立电池模块并联组成,电池模块和电池组的设计参数如表2 所示。
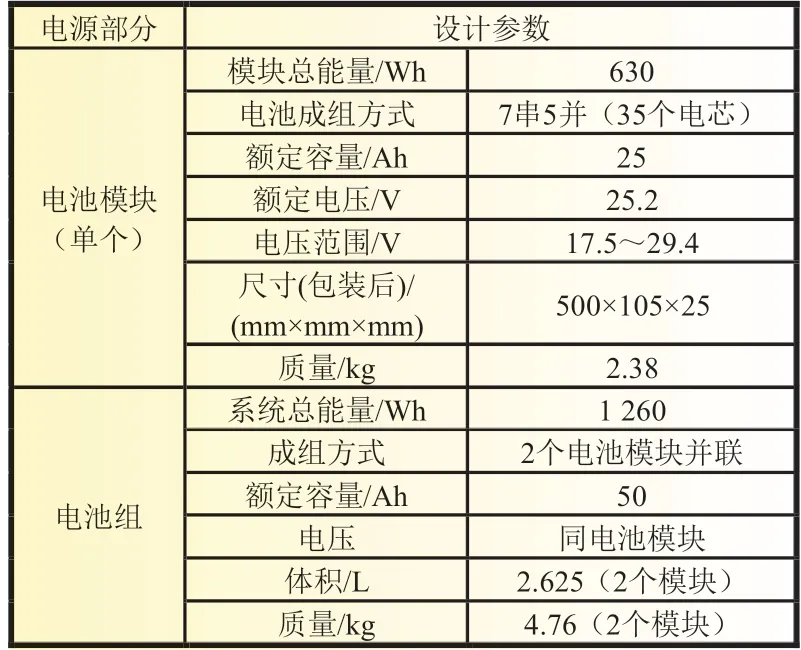
表2 电池组设计参数
该电源系统输出电压范围满足电机24 V 直流电压要求;在机器人机械臂运动过程,即各电机全功率运行过程中,输出平均电流Iave=10.5 A@0.21C,平均功率下可持续运行4.76 h;采用50 A@1C电流充电,1 h 即可充满;在室外作业,可只携带1 块2.38 kg 的电池模块,可在全功率运行状态下,持续运行2.38 h;采用50 A@2C电流充电,0.5 h 即可充满。因此,该电源系统可以满足该仓储机器人电源的性能要求。
2 模型建立
2.1 电池组建模
目前常见的电池等效电路模型由简单到复杂主要有理想电池模型、Rint 模型、Thevenin 模型(单阶和二阶)、PNGV 模型等。本文选用RC 网络与Thevenin 相结合的二阶RC 电路模型[2-5],如图1 所示。该模型同时兼顾了电池特性的动态精度和参数的简单易辨识度。
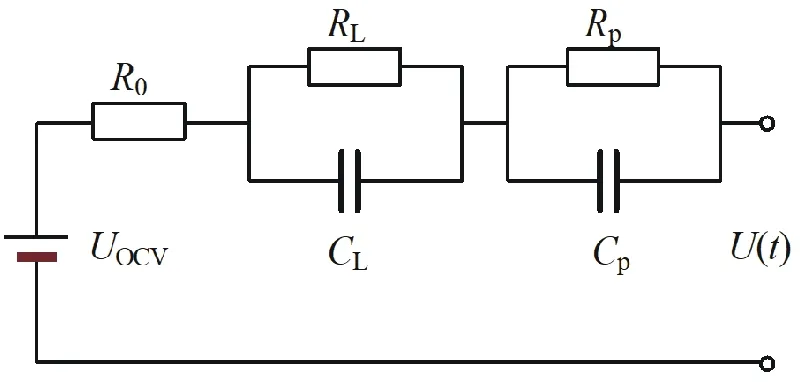
图1 电池组二阶RC 等效电路模型
图1 中,UOCV为开路电压,与剩余电量SOC(t)有关[5],R0为欧姆内阻,RL和Rp为极化内阻,CL和Cp为极化电容,这两个RC 网络可较好地模拟电池电流电压的运行细节。其状态空间表达方程式为:
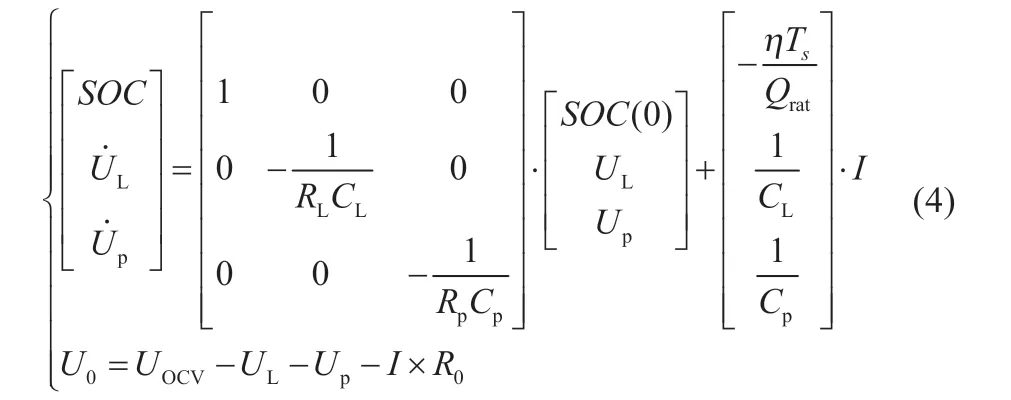
式中:Ts为采样时间;SOC(0)为SOC的初始时刻值;UL和Up分别是RL和Rp的端电压;Qrat为电池额定容量;η是库仑效率,可通过充放电实验获得。该模型中需要辨识的参数有:UOCV、RL、Rp、CL和Cp,可通过对本文选取的N21700CB-50 型三元锂电芯实测实验来获取,如表3 所示。

表3 N21700CB-50 型三元锂电芯实测辨识参数表
表3 将作为电池组Matlab/Simulink 仿真模型电芯单元模块的查表参数。电池容量随环境温度发生变化,通过实测实验,获取N21700CB-50 电芯SOC(标幺值pu 为1)与环境温度之间的数据对应关系,如图2 所示,10~40 ℃为该电芯的最佳工作温度段,当温度低于10 ℃时,电池SOC大幅下降;而当温度高于40 ℃时,电池SOC增大,但此时对电池寿命不利,电池性能将受到影响。

图2 电芯SOC与环境温度的数据对应关系
2.2 电动机建模
机器人用小型电动机常采用直接启动方式。该方式所需设备简单、启动时间短、简单可靠、成本低,但电动机在启动瞬间会产生比额定电流大2~3 倍的冲击电流,并且作用时间在1~10 s[7,9-10]。
电动机的动态特性与机械特性密切相关,可用转子运动方程和电磁转矩方程表示,如式(5)所示,电压方程如式(6)所示,负载转矩TL与电动机消耗有功功率P、转速n的对应关系如式(7)所示[9]。

式中:Te、TL分别为电磁转矩和负载转矩;J为轴系转动惯量;Bm为阻尼转矩系数;ωm为转子机械角速度;θ为转子轴线与定子轴线的夹角;L为感应电机各相等效电感;np为电机极对数,电角速度ωr=npωm;i为定子和转子三相电流;u为定子和转子三相电压;R为绕组电阻。
3 模型仿真
3.1 电池组仿真模型
建立单个电芯Simulink 仿真模型子模块,如图3 所示,包括主电路单元和测量单元。测量内容包括电芯的输出电压U0(t)、电流i0(t)和剩余电量SOC(t)。
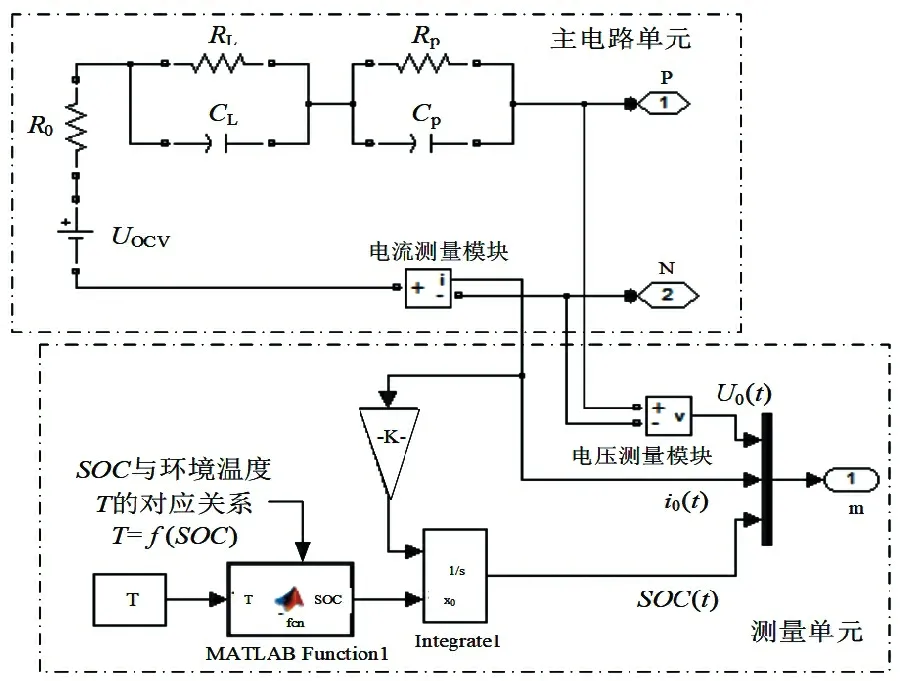
图3 单个电芯Simulink仿真模型
基于表3 的实测辨识参数,其中UOCV、R0、RL、Rp、CL和Cp都随着SOC值的不同查表产生,辨识参数写在Mask 函数里。SOC值采用安时积分法来实现,其公式为:

式中:i0(t)为电芯瞬时电流。其中,SOC(0)与温度的关系见图2,用fcn 函数模块实现数据查找。通过7 串5 并组合方式将电芯子模块搭建为1 个电池模块;2 个电池模块并联为1 个电池组(4 h 室内),或单独使用(2 h 室外)。
3.2 系统仿真模型
将电源模型与电动机负载模型相连,构成整个机器人供电系统源载模型。其中电动机模型由多个不同功率的直流电机并联构成,分别模拟表1 中6 个不同部位的功能电机。本文通过监测电池组输出电压uBattery和输出电流iBattery这两个参量的瞬时波形来讨论三元锂电池组在不同环境温度下的动态特性。
4 试验验证
基于机器人供电系统源载互联仿真模型,设置电源初始SOC(0)=100%,电芯电压U0=4.2 V(SOC=100%状态下),初始容量Q0=50 Ah;仿真模拟机器人运动时6 个不同部位功能电机的启动过程(此时瞬时功率最大)。
动态仿真过程设置:0 s 时,开机启动,此时有部分阻感负载产生少量电流;2 s时,肩部关节旋转和俯仰电机(Pave=154 W)同时启动;2.5 s 时,肘部关节俯仰电机(Pave=60 W)启动;3 s 时,腕部关节旋转、俯仰和偏航3台电机(Pave=17.5 W)同时启动。
设置不同环境温度-20、0、15、25、30、45 ℃,分别获取电池组输出电流iBattery、输出电压uBattery和SOC的瞬态波形,如图4~5 所示。
由图4 可知,机器人运动时,电机启动瞬间产生的电流比平均电流大2~3 倍。3 次电机启动产生的尖峰脉冲电流最大(45 ℃时)分别为24.3、30.1、18.7 A,放电倍率分别为0.49C、0.60C、0.37C,均小于1C,电池组完全可以满足系统瞬时功率的要求。
此外,环境温度对电池系统性能的影响比较大,但在实际工作中,当环境温度低于0 ℃时,电池性能下降,放电能力会相应降低。由图4 可知,三元锂电池虽然电流释放能力有所降低,但仍然可满足电动机启动电流要求(额定电流的2~3倍)。
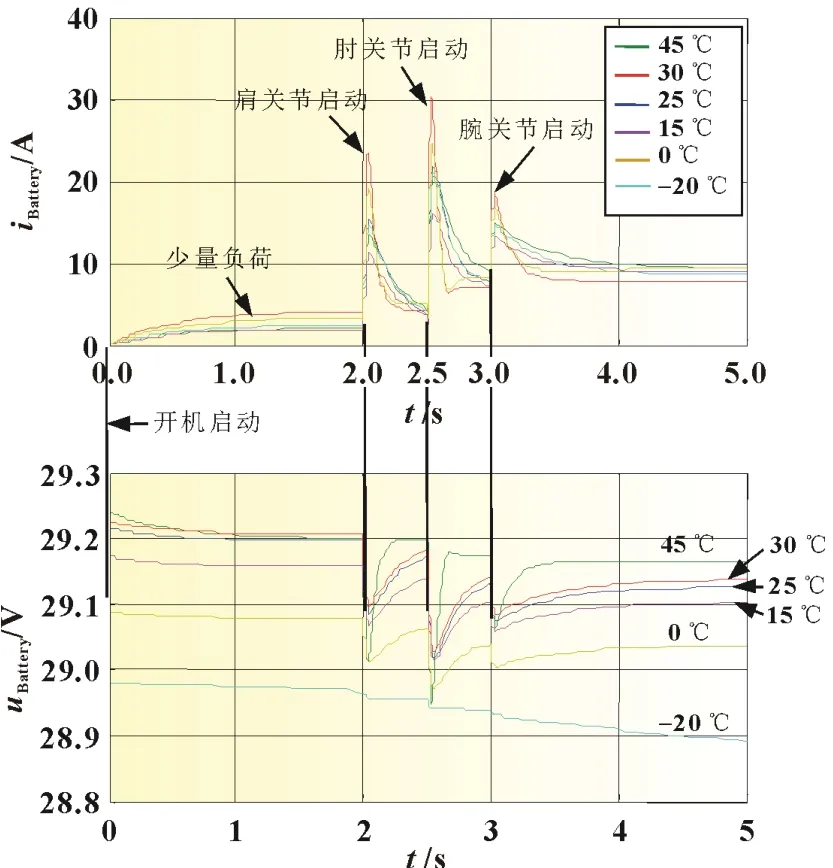
图4 不同环境温度下电池组电压电流动态波形
由图4 可知,输出电压uBattery随着环境温度的降低而下降,随着环境温度的升高而升高;环境温度较高时,电池电压响应特性较好,电压动态恢复时间较短;环境温度越高,电池输出电流iBattery的动态特性就越好,其波形响应速度快,瞬时电流高,即体现出更强的电流释放能力。
由图5 可知,环境温度越高,电池容量越大,SOC斜率越小,即剩余容量下降趋势越缓慢。虽然初始SOC(0)均设置为100%,但实际上,环境温度对电池剩余容量的影响较大,-20 ℃时,实际SOC只有62%,而当25 ℃时,实际SOC会略大于100%。
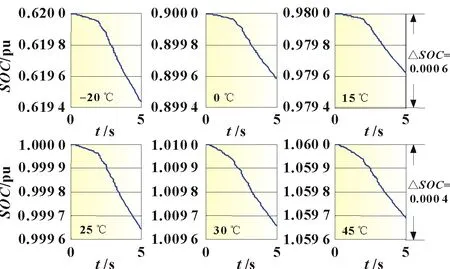
图5 不同环境温度下电池组SOC动态波形
5 结语
本文考虑环境温度对仓储机器人室外作业的影响以及机器人轻量化设计需求,采用三元锂电池构建某型仓储机器人电源系统。通过建立电池组二阶RC 等效电路数学模型和仿真模型,对方案的可行性和环境温度适应性进行了验证,并讨论了环境温度对三元锂电池输出瞬态特性的影响。仿真结果表明,设计方案完全可以满足系统瞬时功率的要求,且低温下三元锂电池的放电能力也可以满足仓储机器人室外作业的要求。虽然三元锂电池具有较高的能量密度和瞬时大电流释放能力,但三元锂电芯在使用时还需要考虑其安全性,尤其在大功率或密闭空间应用场合,包装时需要注意散热设计和防碰撞设计。
猜你喜欢
中国自行车(2022年3期)2022-06-30 05:15:07
电源技术(2022年2期)2022-03-03 04:23:04
Bone Research(2021年2期)2021-09-11 06:02:56
汽车维修与保养(2020年11期)2020-06-09 05:42:14
消费导刊(2017年19期)2017-12-13 08:30:52
汽车维护与修理(2016年10期)2016-07-10 08:17:41
电源技术(2015年11期)2015-08-22 08:50:42
电源技术(2015年7期)2015-08-22 08:48:24
电源技术(2015年9期)2015-06-05 09:36:06
振动、测试与诊断(2014年1期)2014-03-01 01:13:44