
基于分数阶锂电池模型的FOMIAEKF算法SOC估计
2021-11-20 15:16丁羿茗吕瑞强
电源技术 2021年9期
丁羿茗,吕瑞强,蒋 超
(空军勤务学院,江苏徐州 221000)
荷电状态(SOC)作为锂电池特性的一个重要参数,它的精确估计对锂电池正常工作十分重要。传统的SOC计算方法依赖于电池自身特性,如开路电压法和安时积分法,智能估计算法有神经网络算法和扩展卡尔曼滤波算法。文献[1]采用基于数值优化的BP 神经网络(LM-BP)算法对SOC进行估算,提高了收敛速度。神经网络算法可以不需要锂电池模型进行估计,但是估算精度和样本的质量关系密切。文献[2]运用扩展卡尔尔曼滤波(EKF)估算锂电池SOC,减小了安时积分法的累积误差,但是它的近似非线性以及恒定的过程噪声会带来误差影响。文献[3]运用双卡尔曼滤波提高了估算SOC的精度,但是没有减小扩展卡尔曼滤波器近似非线性误差。文献[4]运用自适应扩展卡尔曼滤波算法修正了噪声恒定带来的误差,但是对历史新息数据没有充分利用。
本文在分数阶锂电池模型基础上,提出了多新息自适应EKF 算法,改进了EKF 滤波器过程噪声与观测噪声恒定所带来的的误差,充分利用了历史新息,通过联合估计实时修正模型参数。Matlab 仿真验证表明该方法可以有效提高SOC估算精度和跟踪速度。
1 分数阶锂电池模型
1.1 锂电池分数阶建模
关于分数阶微积分的定义有很多,本文用G-L 定义直接离散化分数阶微分方程,G-L 定义[5]如下:

式中:α 代表方程的阶数,阶数的范围在(0,1)之间;h表示采样时间;k是整数。
使用分数阶理论进行锂电池建模[6],可以反映极化、扩散和非线性因素带来的影响,提高模型的精度,锂电池的分数阶等效电路模型如图1 所示。VOCV是电池的开路电压,R0为电池内阻,R1、R2为纯阻性内阻,分数阶元件用CPE 表示,系数分别为C1、C2,分数阶阶次表示为α、β,取值范围是(0,1),将理想电容元件用分数阶电容CPE 代替,可以更好地反映电极表面的弥散效应。

图1 分数阶等效电路模型
将VCPE1(t)、VCPE2(t)作为系统的状态,I0(t)作为系统的输入,系统的输出为VO(t),分数阶电池模型的状态方程如下:
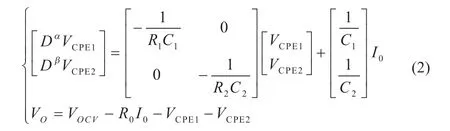
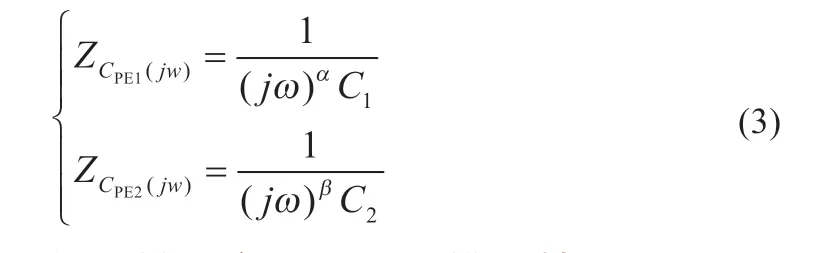
电容CPEI、电容CPE2用分数阶表示如下:
1.2 锂电池分数阶模型参数辨识及模型精度验证
遗传算法步骤如下:随机产生初值并转换为二进制代码,代表不同个体的二进制代码可以通过相互交换、独自变异[7]产生新个体。将二进制码解码后代入适应度函数,判断是否满足要求,当满足设定条件时停止[8],适应性条件如式(4)所示:

式中:Ye(j)是预测输出;Yr(j)是期望输出;M是被测数据组的长度。
遗传算法流程图如图2 所示。

图2 遗传算法流程图
一代种群中,个体的不同会导致适应度和遗传概率的不同,不同个体的交叉概率和变异概率可以表示如下:

式中:Jmin表示适应性条件的最小值,可以看出最优的个体概率均为0,J(i)的值越大,获得进化的机会越多。
自适应遗传算法(AGA)辨识出来的分数阶模型参数(R0、R1、R2、C1、C2)是整个脉冲放电过程的最优解,参数辨识结果如表1 所示。分数阶模型与整数解模型的误差对比如图3 所示,误差数据如表2 所示,分数阶模型的最大误差为0.037 5 V,平均误差为0.004 6 V,均优于整数阶模型。

表1 AGA 算法参数辨识结果

图3 分数阶模型与整数解模型误差对比
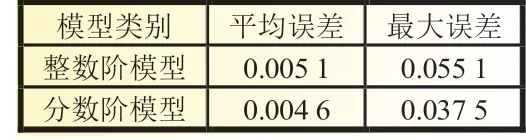
表2 模型误差对比 V
2 基于分数阶扩展卡尔曼滤波算法估计SOC
2.1 分数阶扩展卡尔曼滤波算法
EKF 算法可以处理非线性系统的问题,原理是将非线性系统的空间方程在xk处进行泰勒级数展开,只保留一阶项,得到近似的线性空间方程,对EKF 的状态变量,用G-L 定义求分数阶导数[9-10],采样时间h取为1,得到如下表达式:
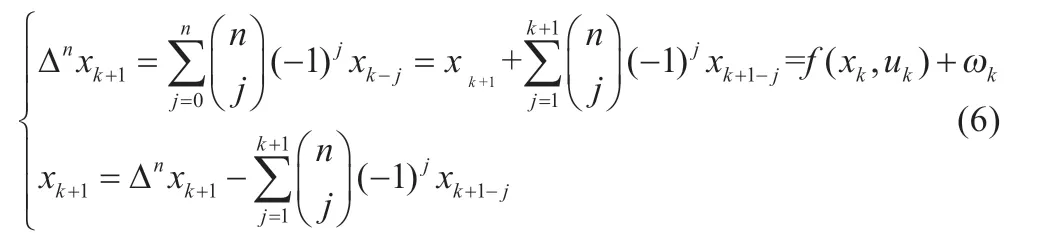
式中:Δ 是差分算子;n是阶数。
将式(2)分数阶模型表达式离散化,可得离散化分数阶锂电池模型表达式[11-12]:

基于分数阶模型,用EKF 算法估算锂电池SOC,运用Matlab 软件在城市循环工况(UDDS)下对算法进行仿真验证,结果如图4~5 所示,分数阶模型的引入使算法的精度得到了提高,整数阶EKF 算法因为模型精度问题,误差始终向一侧偏移,将模型更改为分数阶后,模型的精度提高,虽然在初始阶段,EKF 算法误差较小,但是随着时间的累计,分数阶扩展卡尔曼滤波(FOEKF)算法精度逐渐提高。经计算,EKF 算法估算SOC误差平均值为0.015 3,最大误差为0.033 3,FOEKF算法估算SOC误差平均值为0.011 2,最大误差为0.032 5。
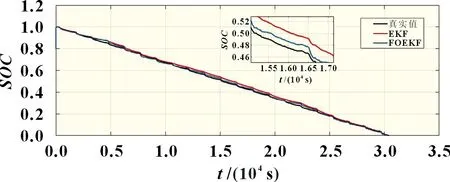
图4 FOEKF和EKF算法估算SOC曲线图
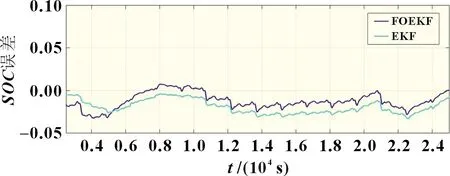
图5 FOEKF和EKF算法估算SOC误差对比图
2.2 分数阶多新息自适应扩展卡尔曼滤波算法
EKF 算法的状态噪声和观测噪声是恒定值,这会导致估计误差变大。自适应扩展卡尔曼滤波(AEKF)算法可以对新息或者残差进行实时监测,修正状态噪声和观测噪声。AEKF 算法过程如下:

式中:ek代表新息,若为则表示残差。
观测噪声方差Rk和状态噪声方差Qk的自适应过程如下:
式中:Fk为新息的实时估计方差;M为滑动数据窗口长度[13]。
将多新息和EKF 算法结合,计算量会略有增大,但是精度得到了提高。将单新息ek扩展到新息矩阵,如下所示[14]:
同时,将增益Kk也扩展成为增益矩阵,那么,状态向量的更新如下所示:

式中:Ki,k是k时刻的增益;Ep,k是新息矩阵;p是新息长度。
在UDDS 工况下,运用Matlab 软件对算法进行仿真验证,将AGA 算法辨识出来的参数代入模型中,仿真结果如图6~7 所示,仿真数据如表3 所示,分数阶多新息自适应扩展卡尔曼滤波(FOMIAEKF)算法估计误差的平均值和最大值都有所减小,说明该算法可以有效提高SOC估计精度。

图6 FOMIAEKF和FOEKF算法估算SOC曲线图

图7 FOMIAEKF和FOEKF算法估算SOC误差对比图

表3 FOEKF 与FOMIAEKF 算法估计SOC 误差对比
3 锂电池SOC 和健康状态联合估计
3.1 UKF 算法估计锂电池健康状态
用UKF 算法估算锂电池健康状态(SOH),将电池容量C和电池内阻R0作为健康状态的估计量,UKF 算法估计流程首先确定状态值初始值x0和后验状态误差协方差初始值P0,计算采样点:
式中:L为状态向量的长度。
UKF 算法增益矩阵的更新如式(14)所示:
3.2 联合估计模型仿真
锂电池在使用过程中会不断老化,它的内阻会变化,容量会降低。但是辨识出来的模型参数是根据实验结果得到的定值。将SOC和SOH联合估计,根据SOH估计出来的内阻值和容量值实时修正SOC估计的参数[15],从而提升SOC估计的精度。图8 是联合估计算法估算SOC的曲线图,图9 是联合估计算法估算SOC的误差图,联合估计算法误差在2.5%之内。图10 为不同算法估算SOC误差对比图,联合估计算法比FOMIAEKF 算法精度更高,说明联合估计算法可以有效提高SOC估算精度。表4 为不同算法估算SOC 误差对比。
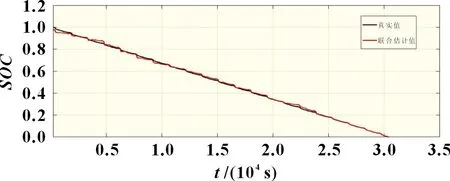
图8 联合估计算法SOC估计值
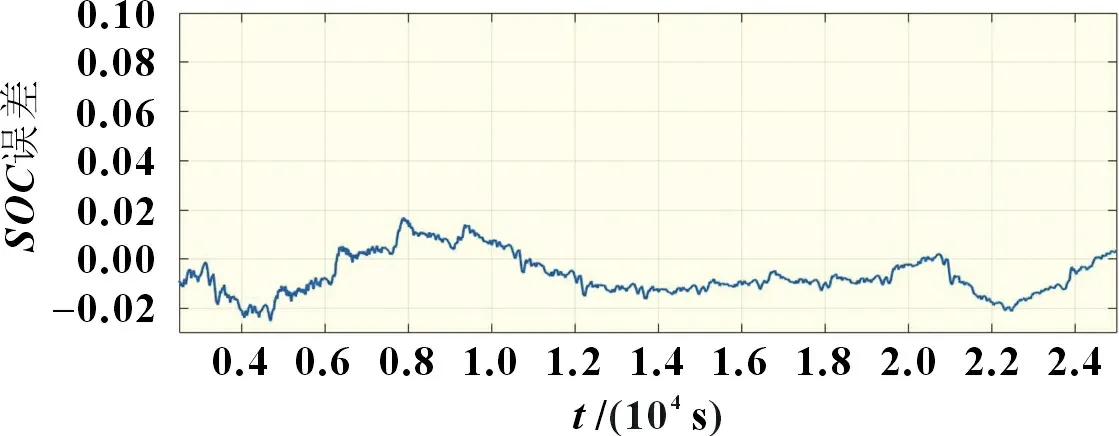
图9 联合估计算法估算SOC误差图
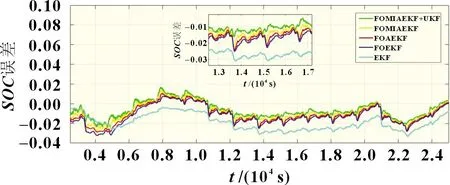
图10 不同算法估算SOC误差对比图
由表4 可知,普通EKF 算法估算SOC的平均误差为0.015 3,用分数阶理论提高模型精度后,FOEKF 算法估算平均误差为0.011 2。针对EKF 算法滤波过程中状态噪声和预测噪声恒定不变的情况,提出一种自适应EKF 算法,可以实时更新噪声方差矩阵,FOAEKF 算法估算SOC的平均误差为0.010 1,精度得到了提高,但是没有充分利用历史新息数据。针对这种情况,将单新息变为多新息矩阵,充分利用了之前未被利用的新息数据,FOMIAEKF 算法估算SOC的平均误差为0.009 1,精度相比于普通的EKF 算法有了明显提高。针对随着锂电池不断老化,模型参数会发生变化的情况,提出了联合估计算法,用UKF 算法估算SOH,实时更新分数阶模型参数,联合估计算法估算SOC的平均误差为0.007 6,精度有了进一步的提高。
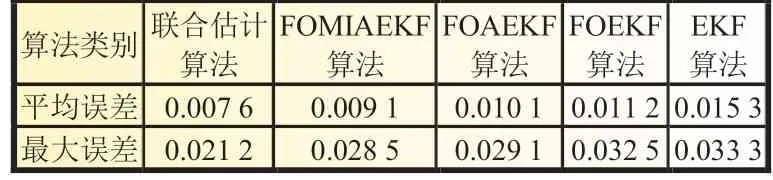
表4 不同算法估算SOC 误差对比
4 结论
本文引入分数阶思想建立锂电池等效电路模型,用AGA算法离线辨识模型参数,通过脉冲放电实验对模型精度进行验证,结果表明,分数阶的引入有效地提高了模型的精度。在UDDS 工况下,运用EKF 算法对整数阶模型和分数阶模型的SOC值进行估算,仿真结果进一步证明了分数阶模型的精度更高。随后,针对EKF 算法的不足进行改进,提出了多新息自适应EKF 算法,解决了EKF 算法噪声恒定以及未充分利用新息数据的问题,并通过与SOH联合估计实时修正分数阶模型参数,减少模型老化带来的影响。仿真结果表明,FOMIAEKF 算法和联合估计算法可以有效地提高SOC估算精度和跟踪速度。
猜你喜欢
黑龙江电力(2022年5期)2023-01-10
青岛科技大学学报(自然科学版)(2021年6期)2021-12-17
青岛科技大学学报(自然科学版)(2021年4期)2021-07-26
北京航空航天大学学报(2017年9期)2017-12-18
电源技术(2016年9期)2016-02-27
中国惯性技术学报(2015年1期)2015-12-19
百科探秘·航空航天(2015年3期)2015-12-01
电源技术(2015年1期)2015-08-22
电源技术(2015年7期)2015-08-22
电子设计工程(2014年6期)2014-02-27
