
柔性协作机器人关节摩擦辨识
2021-11-19 13:43孙若怀
电子测试 2021年20期
孙若怀
(沈阳新松机器人自动化股份有限公司,辽宁沈阳,110168)
0 引言
随着机器人技术的不断发展,使用机器人代替人的繁复劳动已成为目前各行业降低成本、提高制造质量的主要手段[1]。应用行业的扩展,对机器人的易用性提出了更高的要求。因摩擦造成的位置精度和运动平稳性降低的现象在机器人启停或低速运动时表现明显。加之机械臂的位移放大作用,机器人关节的摩擦特性的研究具有重要的意义[2]。
1 机器人动力学模型
本文所研究的为6自由度柔性多关节机器人,采用一体化关节设计。如表1所示,建立机械臂的连杆D-H参数,根据D-H参数可以方便地构建UR机器人的运动学模型。其参数如表1所示。其中αi-1表示连杆的长度,ai表示连杆的转角,di表示连杆的偏距,θi表示关节电机转角。

表1 机械臂的连杆D-H参数

5-90o 0 d5 θ5 6 0o 0 d6 θ6
建立柔性协作机器人动力学模型,可采用Newton-Euler方程:内推,从基座到末端,计算速度、加速度:

外推,从末端到基座,计算惯性力以及关节力矩:

2 关节摩擦辨识
2.1 基于关节电流的力矩估计
柔性机器人采用关节一体化设计,关节之间没有运动耦合,关节伺服电机不存在相互作用;同时由于柔性协作机器人采用谐波减速机,机器人工作在电流-力矩的线性比例区域内,可通过驱动器的电流反馈对关节电机出力的估计。由于机器人存在一定程度的柔性振动,会造成机器人关节力矩估计结果有着较大的周期性浮动,由于相邻两个周期的力矩采集结果之间相差较大,力矩估计结果误差较大[3]。
2.2 关节电流力矩滤波
机器人在运动过程中,各关节的驱动力矩、角速度和位移均为连续值。考虑到当前时刻关节值与以往时刻存在一定的关联性,因此引入加权滑动平均模型来对机器人的控制指令进行修正以消除机器人的周期柔性振动,进而实现对力矩信号的滤波。该滤波器在离散域的传递函数为

对应在S域下的传递函数为




滤波后与滤波前系统相应之比为
可获得完全滤除振动的滤波器参数
2.3 摩擦力矩辨识
通过滤波后的驱动器信息数据,可有效降低摩擦力矩的浮动范围,降低模型辨识后的误差。摩擦力矩模型参数可通过对力矩-角速度数据的拟合来完成[4]。
目前机器人关节摩擦力的基础模型主要有三个选择:①库伦模型+粘性摩擦模型;②Stribeck模型;③n次多项式模型。
采用模型①对于摩擦力因速度而带来的变化不够敏感,摩擦力矩辨识后的偏差难以控制;模型②的特征是在高速段的拟合较为准确,难以准确再现启停阶段的摩力矩;模型③对机器人的滑动摩擦再现效果较好。因此选择模型③作为摩擦模型。
3 实验
3.1 本体实验
实验采用自主研发的UR型5KG关节一体化机器人。能够完全获取机器人运动相关数据。实验主要针对滤波效果和摩擦模型参数辨识效果进行验证。控制机器人第三关节做点位运动,采集机器人对比加入滤波前后的机器人关节电流估计曲线如图1、图2所示。
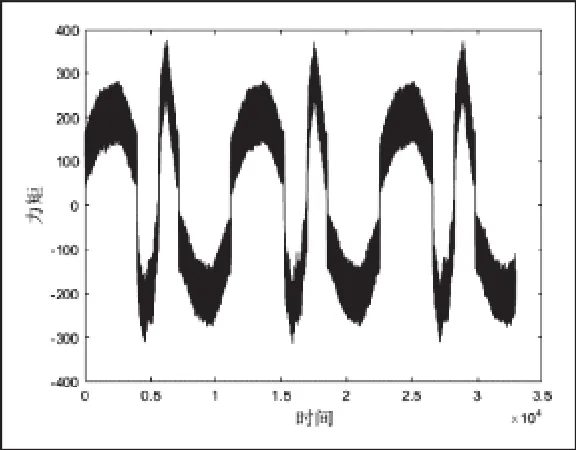
图1 滤波前关节力矩曲线

图2 滤波前关节力矩曲线
柔性协作机器人关节主要受力为由伺服电机提供的驱动力矩以及关节摩擦力矩,每一时刻的摩擦力矩可由如下公式计算得出。

3.2 实验结论
从图1、图2可见,经过滤波后,机器人关节力矩估计结果的浮动范围显著减小,降低至原本的10%以下,降低了关节力矩估计的误差。通过5次多项式模型拟合关节摩擦模型参数后,可决系数可达0.91,结合图3可见,拟合后所得得关节摩擦模型可有效描述关节摩擦力矩随关节角速度的变化。
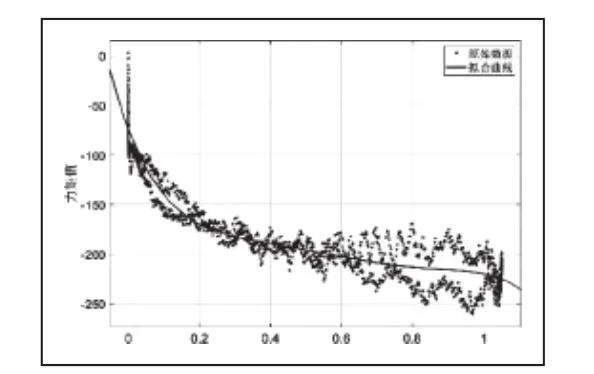
图3 拟合前后角速度-摩擦力矩对比曲线
4 结论
本文针对柔性协作机器人关节摩擦力矩进行了研究,基于加权滑动平均模型设计了电流信号滤波器,降低了关节力矩的估计误差;结合机器人动力学计算结果可得到机器人的摩擦力矩;通过对摩擦力矩关于关节角速度的5次多项式模型的参数辨识获得机器人实际的摩擦力矩模型,拟合结果表明该模型可用于描述关节摩擦特性。
猜你喜欢
石油矿场机械(2022年3期)2022-06-17
装备制造技术(2020年2期)2020-12-14
汽车实用技术(2017年16期)2017-09-21
中学生数理化·高一版(2017年3期)2017-07-08
山东青年(2016年12期)2017-03-02
光学精密工程(2016年6期)2016-11-07
航天制造技术(2016年6期)2016-05-09
火控雷达技术(2016年1期)2016-02-06
探测与控制学报(2015年4期)2015-12-15
中国铁道科学(2015年4期)2015-06-21
