基于自适应伸缩因子的变论域模糊PID 振动控制方法
2021-11-17 07:43:34蒋伟,刘纲,2,王涛,高凯
工程力学 2021年11期
蒋 伟,刘 纲,2,王 涛,高 凯
(1. 重庆大学土木工程学院,重庆 400045;2. 山地城镇建设与新技术教育部重点实验室,重庆 400030)
随着土木工程结构向高、大、长方向发展,结构的非线性、复杂构造等影响益发显著[1],传统抗震设计已无法有效解决结构过大振动问题,故振动控制已成为土木工程领域的重要研究分支。按是否需要外加能源、结构自身响应信息等,振动控制可分为被动、主动、半主动和混合控制4 类[2]。国内外大量学者针对以上四种控制方法进行了深入研究,取得了丰硕成果。其中,半主动控制根据结构响应信息实时改变结构的动力特性(刚度、阻尼),具有耗能小、稳定性高及动力可调等优点,已成为振动控制领域的前沿研究方向。
目前,国内外已成功研发了变阻尼、变刚度和变刚度变阻尼等多种半主动控制系统[3],并在控制装置与控制算法2 个方面取得了长足进步。在控制装置方面,近年来国内外学者和工程界研制了可变刚度、阻尼的阻尼器、隔震支座等控制装置,特别是随着磁流变(magneto-rheological,MR)、记忆合金等智能材料的兴起,变阻尼控制装置得到了飞速发展,研制了粘滞变阻尼器、磁流变阻尼器、电流变阻尼器及压电变摩擦阻尼器等多种新型变阻尼控制装置[4],已在实验室结构、实际工程结构中发挥了重要作用。
在变阻尼系统的控制算法方面,19 世纪初即提出了线性二次状态调节器(linear quadratic regulator,LQR)、滑动模态及Bang-Bang 等控制算法[4]。针对磁流变、电流变等新型阻尼器,逐步提出了线性二次型最优控制[5]、H∞控制[6]等方法。例如,Dyke 等[7]结合线性二次高斯(linear quadratic Gaussian, LQG)与限幅最优控制算法,发展了一种基于加速度反馈的限幅最优控制策略;王梁坤等[8]结合Hilbert-Huang 变换理论和LQG 算法,构建了一种能实时调节电涡流单摆式调谐质量阻尼器摆长和阻尼系数的半主动控制方法;潘兆东等[9]提出了一种基于输出反馈的H∞保性能鲁棒分散控制算法,12 层框架结构数值模拟结果表明所提方法在各层层间位移峰值与绝对加速度上的控制效果均优于传统LQG 集中控制算法;王慧萍等[10]建立了一种基于可变摩擦阻尼力的斜拉索半主动控制算法,实现了斜拉索的多模态同步控制。
针对LQG、LQR 等控制方法需要结构精确数学模型的难题,业界发展了智能控制方法,例如郭佳等[11]引入模糊控制算法,20 层框架结构数值模拟结果表明所提算法对层间位移和楼层速度的减震率均高达60%左右;潘兆东等[12]提出了一种自适应学习率径向基(radial basis function,RBF)神经网络滑模分散控制算法,9 层钢结构Benchmark模型数值模拟结果表明所提方法的首层位移响应峰值控制率明显优于集中控制;Kim 等[13]利用模糊控制理论计算MR 阻尼器所需控制力,较好控制了桥梁结构在风、雨共同作用下的共振现象;马涌泉等[14]结合变论域模糊控制(variable universe fuzzy pid,VUFP)与剪切最优半主动控制,提出了变论域自适应模糊分散控制方法,数值模拟结果表明所提方法的减震效果较VUFP 方法更优;宁响亮等[15]将VUFP 控制算法用于公路桥梁的非线性振动控制,仿真结果表明在控制力峰值相等情况下,VUFP 算法的控制效果明显优于传统模糊和LQG 控制算法;许睿等[16]提出了针对大型薄膜结构的VUFP 方法,仿真结果表明该方法能显著提升模糊控制器对结构振动幅值的鲁棒性。
传统VUFP 算法均采用函数模型来设计伸缩因 子(contracting expanding factors, CEFs), 但CEFs 的参数往往由专家经验确定[17],有时难以实现结构最优控制。为解决该问题,Cui 等[18]引入不规则隶属函数和模糊推理来在线估计CEFs 参数,提高了系统控制性能。但繁琐的积分运算使该方法无法适用于实际工程结构。之后,Gong 等[19]提出了一种用加权和策略来代替CEFs 中积分运算的方法。但该方法无法保证控制系统的稳定性。近年来,随着人工智能算法的发展,神经网络[20]、蚁群算法[21]等逐渐被用于优化CEFs 的参数,但在复杂控制系统中,此类方法的在线计算成本很高,易导致严重的时滞现象。因此,如何优化CEFs 参数成为VUFP 控制方法中的一个重要的研究课题。
鉴于模糊控制方法的潜在优势,本文基于传统VUFP 控制算法,采用半主动控制系统误差及误差变化率设计了一种新型函数型伸缩因子,实现了伸缩因子参数的自适应调整;然后,基于稳定性理论,从理论上验证了所提伸缩因子的合理性,解决了伸缩因子缺乏模糊规则导致控制系统性能降低的难题,从而建立考虑伸缩因子自适应改变的变论域模糊PID(NEVUFP)振动控制方法。最后,利用数值模拟与实验结构模型对所提方法的有效性进行验证。
1 变论域模糊PID 控制
设被控系统在第t时刻的目标响应为y(t)、实际响应为r(t),两者之差为误差信息e(t),即e(t)=r(t)-y(t)。半主动控制算法的基本思路是根据误差信息及外部激励信息计算被控系统所需实时控制参数(例如刚度、阻尼等),并结合执行机构实现被控系统参数的及时调整,从而实现最优振动控制。
PID 算法通过对误差信息e(t)的比例、积分和微分的线性组合[22],得到结构振动控制所需参数u(t):

其中,Kp、Ki和Kd分别为比例、积分和微分系数,往往在综合考虑系统误差、响应时间及稳定性的基础上,通过专家经验确定。
大量算例和实验表明,采用固定Kp、Ki和Kd系数取得的控制效果差强人意[23]。针对这一问题,根据e(t)及其导数ec(t) (ec(t)=de(t)/dt)的变化,模糊PID 算法[24]基于模糊理论,动态改变Kp、Ki和Kd系数。具体而言,首先将e(t)和ec(t)作为模糊控制器的输入变量xi(t) (i=1,2,且x1(t)=e(t),x2(t)=ec(t));将ΔKp(t)、ΔKi(t)和ΔKd(t)作为模糊控制器的输出变量yj(t) (j=1,2,3 且y1(t)=ΔKp(t),y2(t)=ΔKi(t),y3(t)= ΔKd(t));并分别设初始论域为Xi=[-Ei,Ei]、Yj=[-Uj,Uj],其中,Ei、Uj为论域边界。将输入、输出变量的论域均划分为7 个模糊子集:NB(正大)、NM(正中)、NS(正小)、ZV(零)、PS(负小)、PM(负中)、PB(负大),并确定隶属度函数的形式(常用类型有三角形、梯形、钟形等),如图1(a)所示;然后,经输入模糊化、模糊推理及解模糊化3 个过程得到输出变量ΔKp(t)、ΔKi(t)和ΔKd(t)的大小,从而在线调整比例、积分和微分系数:
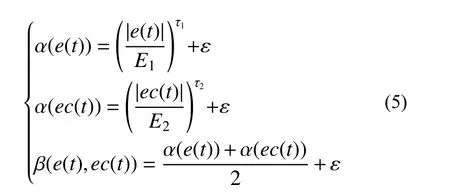
当模糊PID 算法中论域大小选择不当时,较难保证模糊控制器的控制效果。针对这一问题,文献[25]提出了变论域模糊PID(VUFP)算法,即通过引入伸缩因子来在线调整模糊控制器中输入、输出变量的论域范围:根据e(t)和ec(t)计算伸缩因子α(e(t))、α(ec(t))和β(e(t),ec(t)),其中:α(e(t))、α(ec(t))分别为输入变量e(t)、ec(t)的伸缩因子;β(e(t),ec(t))为三个输出变量ΔKp(t)、ΔKi(t)、ΔKd(t)共同的伸缩因子。然后,对输入、输出变量的初始论域进行伸缩调节,以第i个输入变量为例,调节后得到新论域([-α(xi(t))Ei, α(xi(t))Ei]),如图1(b)、图1(c)所示。
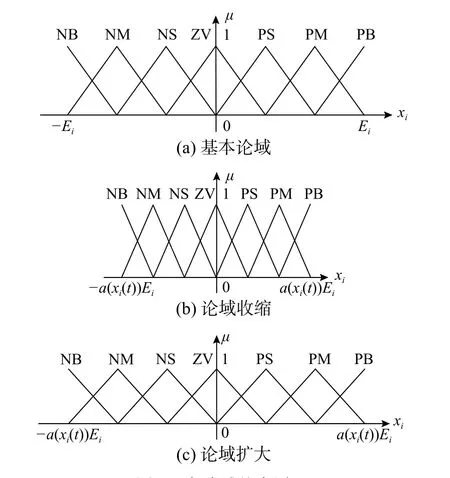
图1 变论域基本原理Fig. 1 The basic principles of variable universe
限于篇幅,本文仅给出了α(e(t))、α(ec(t))的部分模糊控制规则,具体设计细节详见文献[26]:
1) 当e(t)或ec(t)增大时,为保证控制系统始终处于可控范围内, α(e(t)) 或 α(ec(t))应保持不变,因此论域范围也保持不变;
2) 当e(t)或ec(t)减小时,为确保控制器能实施高效控制, α(e(t)) 或 α(ec(t))应足够小(尽量接近0),因此论域范围被压缩。
综合考虑上述设计原则后, α(e(t)) 、α(ec(t))模糊控制规则的设计如表1 所示。其中,B 表示较大,M 表示中等,S 表示较小,Z 表示0。

表1 α(e(t)) 、 α(ec(t))的模糊控制规则Table 1 The fuzzy control rules of α(e(t)) andα(ec(t))
但在实际控制过程中,由于控制系统非线性、时滞性等因素的影响,无法对任意伸缩因子建立如表1 所示完善的模糊控制规则。基于函数模型的方法直接采用某些特殊函数设计伸缩因子,避免了基于模糊规则的方法在缺乏完善模糊规则导致控制性能降低的问题,因此本文针对基于函数模型的VUFP 算法进行研究。在工程应用中,目前通常选用比例指数函数模型设计伸缩因子[27]:

式中:ε 为一充分小的正数;E1、E2分别为输入变量e(t)、ec(t)的初始论域边界;τi(i=1,2,3,4)为伸缩因子设计参数,且τi∈[0,1]。
VUFP 算法的具体计算流程如图2 所示。

图2 VUFP 控制系统流程图Fig. 2 The flowchart of VUFP control system
2 基于伸缩因子参数自适应的VUPF控制算法
2.1 新型伸缩因子设计
应指出的是,函数型伸缩因子中τi是人为选定的常数,缺乏明确物理意义。尽管相关学者针对τi进行了大量研究,给出了大致取值范围,但每个大型土木工程结构不尽相同,无法给出具有普遍意义的选值方法。因此,本文提出根据系统误差及误差变化率实时调整τi:

式中,δ 为足够小的正数,以使分母不为零。当τ1>1 时,取τ1=1。为保持输入、输出变量的协调性,取τ2=τ3=τ4=τ1。将式(4)代入式(3),则得到新型函数型伸缩因子为:
2.2 新型伸缩因子稳定性分析
伸缩因子应具有稳定性,才能保证控制系统能快速降低e(t)和ec(t),从而使结构趋于稳定[28]。以下分别从对偶性、避零性、单调性、协调性和正规性5 个方面验证新型伸缩因子的稳定性。
1) 对偶性


5) 协调性
将式(5)改写成 |e(t)|关 于 α (e(t))的函数:
因此 |e(t)|≤Eα(e(t)),满足协调性关系,保证调整后论域不会超出初始论域([-E1,E1])范围。同理可证, α (ec(t))也满足协调性。
在 式(5)中, β(e(t),ec(t)) 是α(e(t))、α(ec(t))的线性组合,易证 β(e(t),ec(t))也满足上述5 个条件。综上所述,本文提出的新型伸缩因子α(e(t))、α(ec(t)) 、β(e(t),ec(t))均满足上述五种稳定性条件。
将本节提出的新型伸缩因子与传统VUFP 算法相结合,建立基于自适应伸缩因子的变论域模糊PID(NEVUFP)控制方法,具体流程如图3 所示。图中加底色部分表示本文中新增的自适应函数。

图3 NEVUFP 控制系统流程图Fig. 3 The flowchart of NEVUFP control system
3 数值模拟
3.1 三层框架模型
建立3 层平面框架结构模型,假设楼层质量均集中在楼板,各层质量均为98.3 kg、刚度均为6.84×105N·m-1,第1 层阻尼为125 N·s·m-1,第2 层~3 层阻尼均为50 N·s·m-1,结构底部与基础刚接。采用Simulink 模拟该框架结构半主动控制系统,包括结构响应信息采集、控制器以及设置于结构底层的磁流变(MR)阻尼器,如图4 所示。

图4 三层框架结构Fig. 4 Three-storey frame structure
磁流变阻尼器力学性能选用现象模型来模拟[29],如图5 所示。

图5 MR 阻尼器现象模型Fig. 5 The phenomenological model of MR damper
现象模型阻尼力f可表示为:
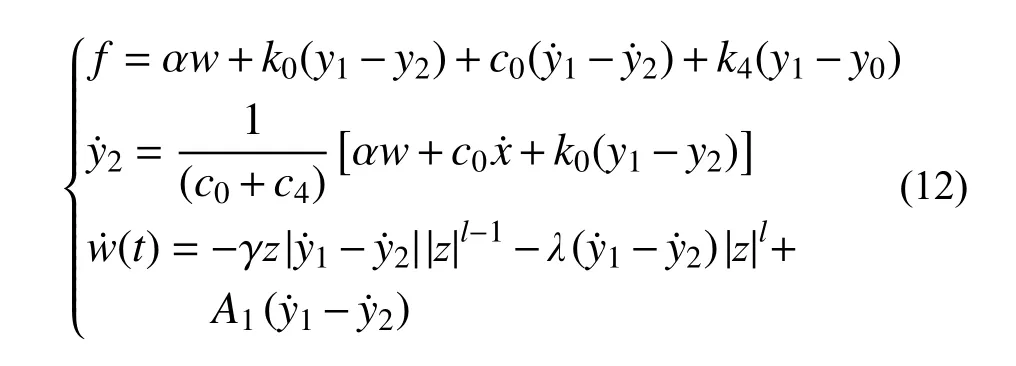
式中:k4为储能器刚度;c0、c4分别为较大、较小速度下阻尼器的等效阻尼系数;y0为储能器初始位移;k0为较大速度下阻尼器的等效刚度;y1为阻尼器位移;y2为弹簧k0左端位移;γ、λ、l和A1为阻尼器相关调节参数,根据磁流变液特性和磁流变阻尼器的结构特性进行取值;w为中间变量。
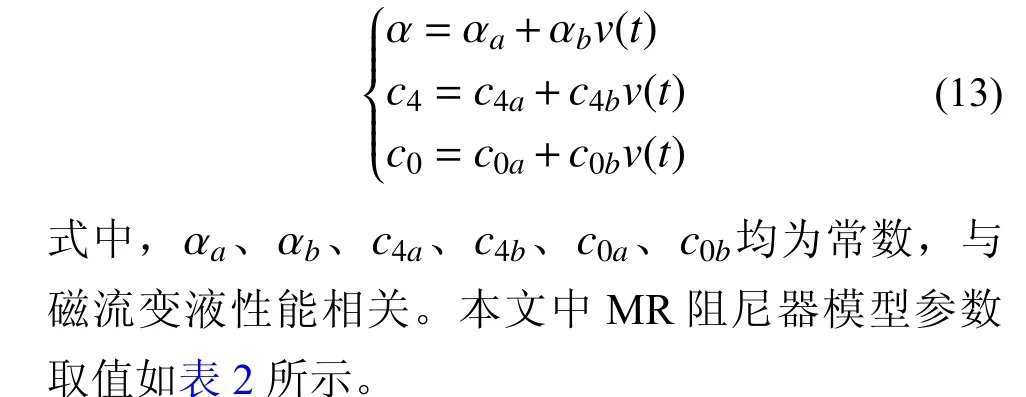
文献[29]通过试验给出式(12)中系数α、c4、c0与阻尼器输入电压v符合以下线性关系:
将结构底层速度、位移的误差及误差变化率作为控制算法的输入,将MR 阻尼器阻尼力作为输出。为验证控制算法的有效性,选取如图6 所示的0.34g南北向EI Centro 波进行激励。
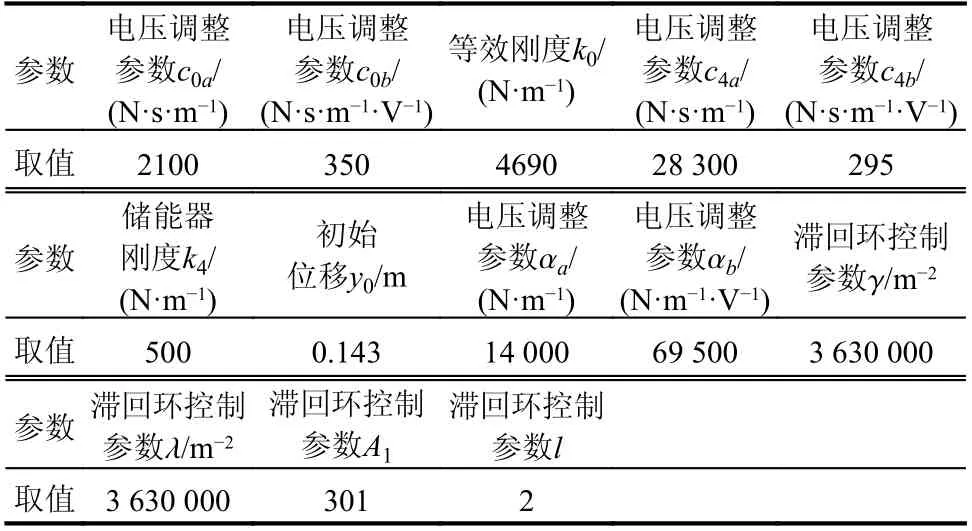
表2 MR 阻尼器参数取值Table 2 The value of parameters of the MR damper

图6 南北向EI Centro 波加速度曲线Fig. 6 The acceleration curve of the north-south EI Centro wave
分别采取无控、PID 控制、VUFP 控制和NEVUFP 控制方法进行对比分析,并以结构顶层相对位移、绝对速度和绝对加速度峰值作为控制效果评价指标。其中,对于PID 控制,采用临界比例法[30]设计三个参数Kp=2.97、Ki=72.74、Kd=0.004;对于VUFP 控制,τ1、τ2、τ3、τ4分别取为0.95、0.98、0.95、0.98;对于NEVUFP,按第2 节设计控制系统。
3.2 仿真结果
限于篇幅,仅给出结构顶层相对位移时程曲线,如图7 所示。从图7 可以看出,在无控状态下结构顶层相对位移峰值高达10.34 mm,而在PID 控制、VUFP 控制、NEVUFP 控制作用下,分别降低至4.835 mm、4.021 mm 和3.528 mm,控制率分别为53.24%、61.12%、65.88%,表明以上控制算法均能有效抑制结构位移响应,其中NEVUFP 算法控制效果最佳。

图7 顶层位移时程曲线Fig. 7 The time history curve of the displacement of top floor
结构各楼层相对位移响应峰值及控制率如表3所示。在不同控制算法下,结构相对位移响应峰值及控制率均随着楼层的增高而逐渐降低,其中NEVUFP 算法减振效果明显优于PID 和VUFP 控制算法。这主要是由于NEVUPF 算法能在线调整伸缩因子参数,使MR 阻尼器的输入参数更加精确,从而提供更为准确的阻尼力。

表3 结构各层相对位移峰值及控制率Table 3 The peak values and control rates of the relative displacement of each floor
本文仅给出伸缩因子参数τ1的时程变化曲线,如图8 所示。在不同时间步,伸缩因子τ1根据e和ec实时调整,其中τ1最大变化(约0.8)发生在EI 波峰值(约2.04 s)处,主要原因在于此时结构振动最大,所产生的系统误差也往往最大,根据第1 节中伸缩因子的模糊控制规则,此时需较大调整τ1方能对结构实施高效控制。因此,NEVUFP 算法能在不依赖专家知识或工程经验的前提下,实现伸缩因子参数自适应调整,从而施加更为有效的控制参数。
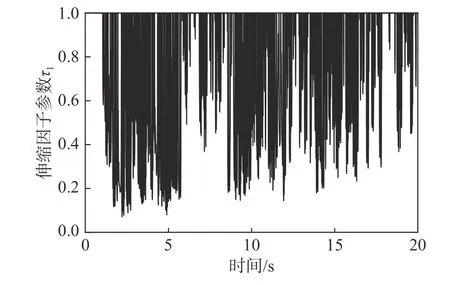
图8 参数τ1 变化时程曲线Fig. 8 The time history curve of τ1
4 振动台试验
4.1 实验系统简介
在实验室搭建3 层单跨钢框架结构,结构开间、进深和层高分别为600 mm、400 mm 和512 mm。楼层由600 mm×400 mm×6 mm 钢板组成;柱由钢管组成,所有钢管尺寸为500 mm×16 mm×2 mm,钢管两端焊接70 mm×70 mm×6 mm 的矩形连接板,并通过4 颗螺栓和钢板连接。底层每根钢管通过4 颗螺栓与800 mm×800 mm×10 mm 钢板固定,然后,将该钢板固定在振动台上。每层楼板均配重10 kg 铁块。RD-8041-1 MR 阻尼器以37.06°倾角安装在结构底层,一端与第一层楼板固定,一端与振动台上刚性框架固定,如图9 所示。
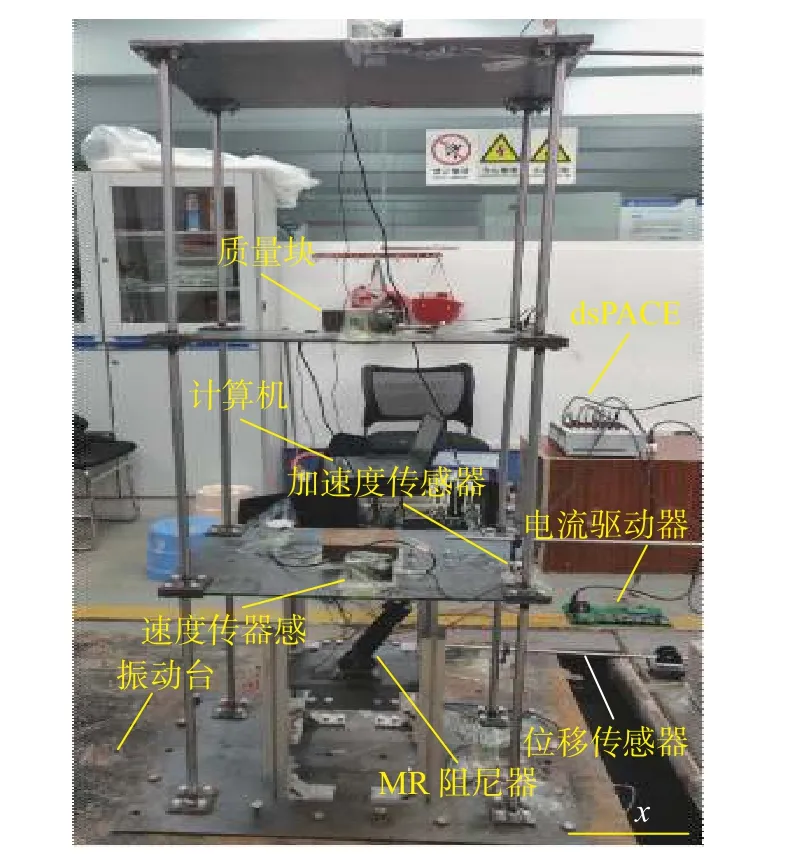
图9 半主动控制实验图Fig. 9 Experimental setup of the semi-active control
在各层布设P15H-2 压电加速度传感器、941B速度传感器和磁致伸缩位移传感器,并采用dsPACE 1303 实时仿真系统中的MicroLabBox 模块进行数据采集。通过dsPACE 调用编译好的控制算法来计算结构所需控制力,再通过数模转化模块(D/A)、电流驱动器将信号传输给MR 阻尼器,从而实现框架结构的半主动控制。
分别采用EI Centrol 波和Taft 波对钢框架进行单向激励(图9 中x向),采用结构底层速度、位移的误差及误差变化率作为输入,对各层加速度、速度及位移进行同步控制。对PID、VUFP 和NEVUFP控制算法进行对比,其中,根据拼凑法[31]选取PID 中参数Kp=2.77、Ki=17.106、Kd=0.1496;通过现场试控制,VUFP 算法中τ1、τ2、τ3、τ4分别取0.65、0.2、0.65、0.2。
4.2 试验结果
本文仅给出EI Centrol 波激励下结构在实施VUFP、NEVUFP 控制前后顶层相对位移时程曲线,如图10 所示。在实施VUFP、NEVUFP 控制后,结构顶层相对位移响应明显降低,而NEVUFP算法具有更好的控制效果。

图10 顶层相对位移时程曲线Fig. 10 The time history curve of the relative displacement of top floor
在地震波作用下结构各楼层加速度、位移的最大峰值响应如图11 所示。在PID、VUFP 和NEVUFP 控制算法作用下,结构顶层加速度峰值由5634 mm/s2分别降低至3595 mm/s2、3333 mm/s2和1805 mm/s2,减振率分别为36.18%、40.84%、67.96%;结构相对位移峰值由3.15 mm 分别降低至1.63 mm、1.56 mm 和1.37 mm,减振率分别为48.25%、50.48%、56.51%。结果表明,两种地震波下NEVUFP 算法均具有更好的控制效果。

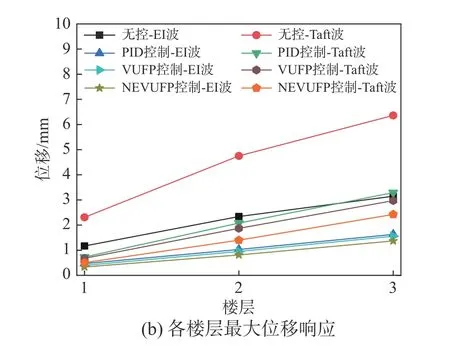
图11 各控制算法下结构加速度及位移最大值Fig. 11 The peak values of the accelerate and displacement of each floor
5 结论
针对传统变论域模糊(VUFP)控制算法中伸缩因子参数缺乏明确物理意义、无法自适应调整的问题,提出了自适应变论域模糊控制方法。采用理论推导证明了所提新型函数型伸缩因子的稳定性,并通过数值算例与振动台试验验证了所提方法的适用性。所得结论如下:
(1)在假定输入、输出变量伸缩因子设计参数相等(τ1=τ2=τ3=τ4)的前提下,通过理论证明了新型伸缩因子满足对偶性、非零性、单调性、正规性和协调性条件,从理论上阐明了所提算法的稳定性;
(2)在选取比例指数函数模型伸缩因子的前提下,根据系统误差及误差变化率,构建了伸缩因子参数的数学模型,实现了伸缩因子参数的自适应变化;
(3)三层框架数值算例结果表明,NEVUFP 控制方法相比于PID、VUFP 控制算法,在顶层相对位移方面分别提高12.64%、4.77%,说明本文方法的控制效果较好;
(4)振动台试验结果表明,针对三层框架结构顶层位移,相比于PID、VUFP 算法,NEVUFP 算法在EI Centrol 波作用下控制率分别提高8.26%、6.04%,在Taft 波作用下控制率分别提高13.61%、8.58%,这表明所提方法对实际结构在地震作用下的振动控制具有较好适用性。
猜你喜欢
设备管理与维修(2022年21期)2022-12-28 07:33:54
成都信息工程大学学报(2021年6期)2021-02-12 03:00:52
装备制造技术(2020年11期)2021-01-26 00:38:58
工业安全与环保(2020年10期)2020-11-05 05:51:04
测控技术(2018年10期)2018-11-25 09:35:52
四川建筑(2018年4期)2018-09-14 00:16:52
广东石油化工学院学报(2016年3期)2016-05-17 05:17:10
电源技术(2016年2期)2016-02-27 09:04:56
中国石油大学学报(自然科学版)(2015年2期)2015-11-10 06:08:17
噪声与振动控制(2015年4期)2015-01-01 07:08:24