
电液振动台正弦运动控制方法
2021-11-17 00:25韩朝阳范大莽关广丰王海涛
液压与气动 2021年11期
韩朝阳, 范大莽, 关广丰, 熊 伟, 王海涛
(大连海事大学 船舶与海洋工程学院, 辽宁 大连 116026)
引言
正弦振动试验是振动力学环境模拟的一项重要内容,可以激励试件在固定频率点上的模态,满足绝大多数具有周期性振动环境模拟试验的要求,多被用于被试件的可靠性试验,目前被广泛应用于国防、航空航天、汽车、土木建筑等工业领域。
电液振动台是大型结构正弦振动模拟试验的常用设备,具有输出力矩大、响应速度快、功率质量比大等优点。但在实际应用中,电液振动台本身存在诸多的不确定性,包括系统参数时变性、随机不确定干扰力等因素,大大降低了系统的稳定性以及控制精度。
目前,国内外已经有一些控制策略被用于抑制不确定干扰力对电液振动台的影响,1977年UTKIN V I[1]提出了滑模变结构控制 (Variable Structure with Sliding Mode Control,VSC)和滑模控制(Sliding Mode Control,SMC)的方法。王鑫刚等[2]为抑制外界干扰,提高电液振动台位置波形复现精度,提出一种带有观测器的反馈线性化滑模控制策略。仝宁可等[3]提出一种基于指数收敛干扰观测器的滑模控制策略,实现了对舰艇导弹筒盖系统的控制。
由于电液振动台在实际运行时还需要考虑伺服阀动态特性、模型参数时变性等因素,导致单一的滑模控制并不能在抑制干扰力影响的同时为系统提供良好的跟踪精度。
针对电液振动台参数时变性、模型不确定性等问题,1989年STOTEN D P等[4]提出了最小控制综合(Minimal Control Synthesis,MCS)算法,该算法源于标准的模型参考自适应控制(Model Reference Adaptive Control,MRAC)算法,突出优点在于不需要准确了解系统的任何参数信息,就能保证系统在系统参数变化未知、数学模型不确定等情况下都能达到优良的闭环性能,自动补偿系统参数不确定、模型不确定的影响,保证系统的稳定性。
虽然目前国内外对电液振动台的研究已经有很多成果,但是在正弦运动振动控制中,既抑制干扰力影响还能提高电液振动台的跟踪精度的研究相对较少。因此提出将滑模控制和MCS算法联合应用,组成一种复合控制策略,用于正弦振动控制中,从而实现既抑制系统受到的不确定干扰力影响又提高系统跟踪精度。
1 复合控制策略
电液振动台在不考虑伺服阀动态特性时为低阶系统,当利用低阶振动台系统模型通过反步法去推导滑模控制器时,系统在抑制随机干扰力影响的同时也可以具有良好的跟踪精度。但电液振动台在实际情况中是加速度控制系统,必须考虑伺服阀动态特性,并且需要采集阀芯位移及其导数信号,工程实现比较困难。所以仿真时采用低阶振动台系统模型设计的滑模控制器去控制考虑伺服阀动态特性的高阶振动台系统,这就导致单纯使用滑模控制时系统的跟踪精度存在很大偏差。因此在外环加入MCS算法对系统偏差进行补偿,提高系统跟踪精度,再通过三状态控制器实现系统的加速度信号控制[5],形成整个系统的控制闭环,复合控制策略的基本原理如图1所示。

图1 复合控制策略的基本原理图
2 控制器设计
2.1 阀控液压缸
建立阀控液压缸数学模型需要3组基本方程[6],阀流量-压力特性的线性化方程为:
QL=Kqxv-KcpL
(1)
对称液压缸的流量连续性方程为:
(2)
液压缸输出力与负载力的平衡方程为:
(3)
式中,QL—— 液压缸流量
Kq—— 阀的流量增益
Kc—— 阀的流量-压力系数
pL—— 负载压降
A—— 液压缸活塞有效面积
Ctc—— 液压缸内泄漏系数
Vt—— 液压缸两腔总容积
βe—— 有效体积弹性模量
m—— 液压缸负载
d—— 不确定干扰力
设状态变量为:
(4)
阀控液压缸状态空间方程为:
(5)
阀控缸状态空间方程系数为:
(6)
本研究将电液伺服阀动态特性近似为二阶振荡环节,其传递函数为:
(7)
式中,ωv—— 电液伺服阀固有频率
ξv—— 电液伺服阀阻尼比
阀控液压缸主要参数如表1所示。
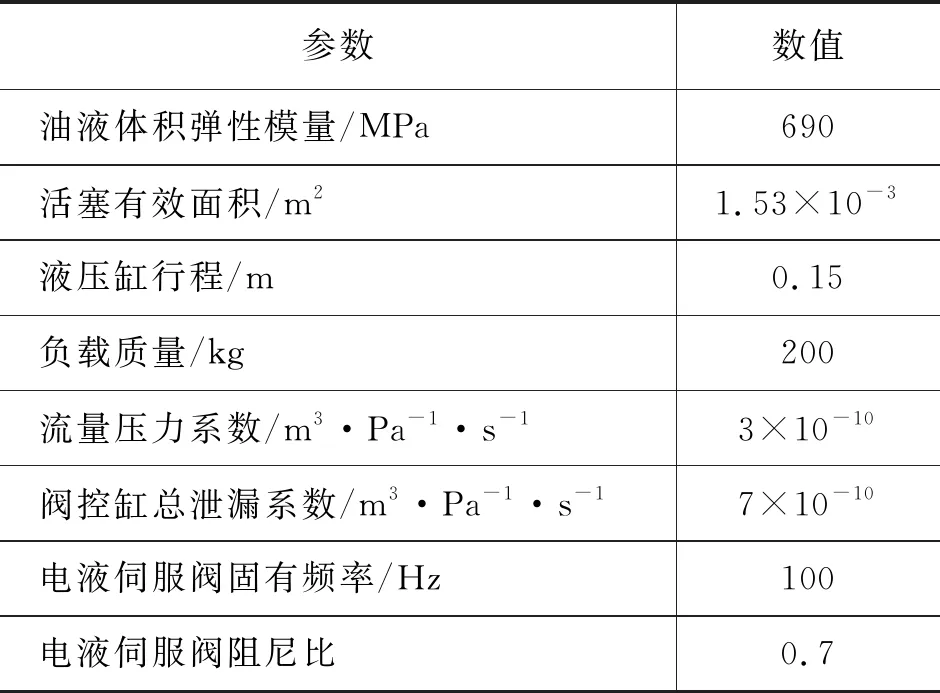
表1 阀控缸参数
2.2 滑模控制器
将滑模控制理论与反步递推设计方法相结合,设计滑模控制器[7-8],提高系统对不确定干扰力的抑制能力。由式(5)可知,系统的第1个方程不含有任何不确定性,将第1个系统方程与第2个系统方程综合起来设计,定义如下误差变量为:
(8)
式中,xm—— 系统期望位置输出信号
k1—— 正的反馈增益
由式(8)可以看出,误差变量z1表征了系统的位置跟踪误差,所以可以通过设计k1来获得预期的滤波效果,进而优化系统的位置跟踪误差z1。z2则同时包含位置跟踪误差和速度跟踪误差,因此在接下来的设计中,以将z2趋近于0为设计目标,定义李雅普诺夫函数V1为:
(9)
在此步设计中,为了使z2趋近于0,将x3看成虚拟控制输入,设计一个控制函数α2,控制x3使z2趋近于0,控制函数α2的结构形式为:
(10)
式中,α2a为模型补偿项;α2s可以看成系统的线性稳定反馈;D为随机干扰力估计最大值。
当建模不确定性和干扰较大时,会造成较大的抖振,因此需要使用切换函数。采用切换函数的滑模控制实质为:在边界层之外,采用切换控制,使系统状态快速趋于滑动模态;在边界层之内,采用反馈控制,降低在滑动模态快速切换时产生的抖振,并保证函数一直在边界层之内。因为滑模控制器接下来的设计中需要对切换函数求导,所以采用连续光滑的双曲正切函数tanh(x/ε)代替不连续的饱和函数sat(s)作为切换函数,保证在对切换函数求导时,也可以有效的降低滑模控制器产生的抖振,双曲正切函数中ε>0,ε值的大小决定了双曲正切函数拐点的变化快慢[9]。
定义控制函数α2和虚拟控制输入x3的偏差为:
z3=x3-α2
(11)
定义李雅普诺夫函数V2为:
(12)
将式(5)和式(10)代入式(12)并求导得:
(13)
在此步设计中,如果能使z3趋近于0,即x3精确追踪到α2,跟踪误差z1和z2将有界并且随着时间的推移而进入一个可人为设定的域内。因此接下来的设计以将z3趋近于0为目的,设计控制器u的结构形式为:
(14)

(15)
将式(14)代入式(13)得:
(16)
当k2=k3时:
(17)
(18)
此时V2渐进收敛,收敛精度取决于D,k3和ε。D越小、k3越大及ε越小,收敛精度越小,滑模控制器越稳定。
如果不考虑伺服阀动态特性,电液振动台单独使用滑模控制器已经可以达到既抑制了随机干扰力影响,还具有良好的跟踪精度的目的,但在实际情况下,电液振动台必须考虑伺服阀动态特性,此时滑模控制器并不能提供良好的跟踪精度,因此在外环加入最小控制综合算法补偿滑模控制器的不足,提高系统的跟踪精度。
2.3 最小控制综合算法
MCS算法是MRAC算法的改进,MCS算法控制器在设计过程中只需要给定参考模型的参数而不需要被控系统的准确信息,工作时根据参考模型与被控对象之间的状态偏差驱动自适应律,进而实现系统控制的目的。
MCS算法控制律为:
u(t)=Kr(t)r(t)+K(t)x(t)
(19)
式中,r(t)是系统输入信号,自适应增益Kr(t)和K(t)为:
(20)
式中,α和β是比例因子,决定了自适应控制效果,通常由经验选取,要求[α∶β]=10∶1,初值常取[α∶β]=1∶0.1。若系统响应速度慢,α和β取值则适当增大;若噪声过大,α和β取值则适当减小。
定义输出误差ye(t)为:
ye(t)=Cexe(t)
(21)
参考模型输出与被控结构输出误差xe(t)为:
xe(t)=xm(t)-x(t)
(22)
式(21)中Ce则通过求解李雅普诺夫方程得到的正定矩阵P求得:
(23)
(24)
参考模型的带宽应高于预期干扰带宽,同时又要足够低,以降低传感器噪声的影响[10],经过多次设计迭代,期望的参考模型被选择为:
(25)
参考模型的输出信号即为系统的期望信号。
3 仿真分析
在MATLAB/Simulink中搭建基于图1所示复合控制策略原理的仿真模型[11],通过分析干扰力与系统位置频率特性、正弦运动信号跟踪结果,检验复合控制策略有效性,控制器主要参数如表2所示。
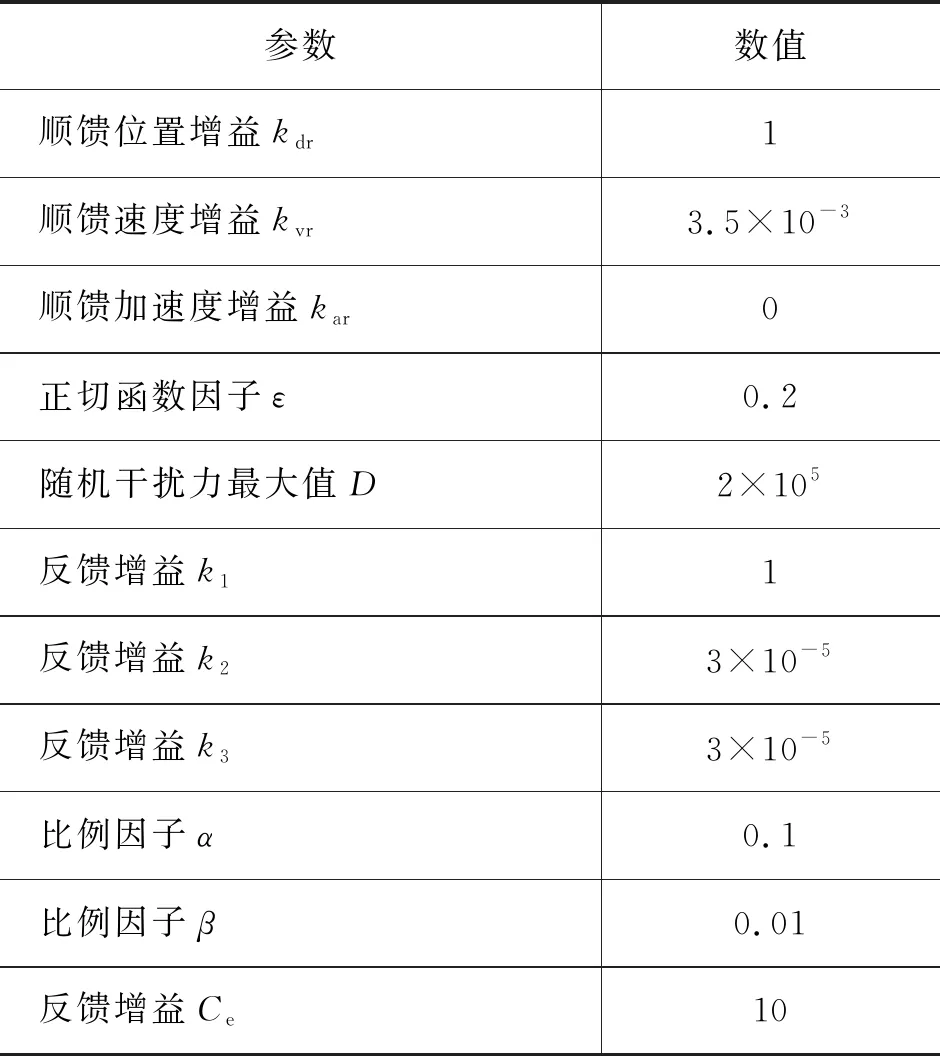
表2 控制器参数
仿真中设置电液振动台所受干扰力为随机干扰信号,频宽为100 Hz,随机信号的峰值约为油源供油压力的20%~30%,图2为干扰力与位移的频率特性曲线。

图2 干扰力与位移频率特性曲线
通过图2可以看出,在系统的工作频率范围内,系统使用三状态控制器,干扰力与位移频率特性曲线在-125 dB左右;而使用滑模控制器之后,频率特性曲线明显下降,低于-170 dB,滑模控制器在很大程度上削弱了随机干扰力对系统输出的影响;并且系统在10 Hz之前幅值相差大于45 dB,在10 Hz之后幅值差逐渐减小,说明频率小于10 Hz时滑模控制器抑制干扰力效果更好。
输入幅值为5 m/s2,频率为10 Hz的加速度正弦信号,对比滑模控制器和经典三状态控制器[12]正弦振动仿真曲线,图3为忽略阀动态时滑模控制器和经典三状态控制器的正弦运动信号跟踪曲线, 图4为忽略阀动态时滑模控制器和经典三状态控制器的正弦运动信号跟踪误差曲线。

图3 忽略阀动态滑模控制和三状态控制正弦跟踪曲线

图4 忽略阀动态滑模控制和三状态控制正弦跟踪误差曲线
由图3和图4可以看出,系统不考虑伺服阀动态特性时,在三状态控制器作用下,输出信号出现波动并且有一定程度的相位滞后,信号跟踪误差很大,不能很好地抑制干扰力的影响,而滑模控制器输出曲线很平滑,信号跟踪误差大大减小,可以很好的抑制干扰力影响。
综上所述,滑模控制器可以削弱干扰力对系统输出的影响。
由于电液振动台在实际工作时,需要考虑伺服阀动态特性,图5为单独使用滑模控制器,对比系统是否考虑阀动态时的正弦运动信号跟踪曲线,图6为正弦运动信号跟踪误差曲线。

图5 滑模控制器正弦跟踪曲线
由图5和图6可以看出,在系统考虑伺服阀动态特性后,滑模控制器虽然能抑制干扰力影响,但信号跟踪误差明显增大,不能提供良好的跟踪精度,因此在外环加入最小控制综合控制器补偿滑模控制器的不足,提高系统跟踪精度,图7为复合控制策略下加速度正弦跟踪曲线,图8为复合控制策略下加速度正弦跟踪误差曲线。

图6 滑模控制器正弦跟踪误差曲线

图7 复合控制策略正弦跟踪曲线

图8 复合控制策略正弦跟踪误差曲线
由图7和图8可以看出,加入最小控制综合算法后,系统输出信号光滑,抑制了干扰力的影响,并且输入输出信号跟踪误差控制在3%以内,系统具有良好的跟踪精度,实现了在抑制了干扰力影响的同时提高跟踪精度的目的,复合控制策略有效。
4 结论
本研究为了提高正弦振动试验的控制精度,针对电液振动台在实际工作中受不确定干扰力影响的情况,提出将滑模控制和MCS算法组成一种复合控制策略运用到电液振动台系统中。在电液振动台系统忽略伺服阀动态时,使用滑模控制补偿随机干扰力对正弦振动控制精度的影响,在考虑伺服阀动态后,加入MCS算法补偿滑模控制的不足,结合三状态控制实现系统加速度控制,利用MATLAB/Simulink构建基于复合控制策略的仿真模型,对比系统闭环刚度特性和正弦运动信号跟踪曲线结果表明,该控制策略有较好控制效果,证明了系统方案的正确性与可行性。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
新高考·高三数学(2022年3期)2022-04-28
哈尔滨工业大学学报(2022年5期)2022-04-19
化工管理(2021年7期)2021-05-13
装备制造技术(2020年3期)2020-12-25
中学生数理化·高一版(2018年6期)2018-07-09
中学生数理化·高二版(2016年9期)2016-05-14
专用汽车(2016年4期)2016-03-01
电测与仪表(2015年16期)2015-04-12
振动工程学报(2015年1期)2015-03-01
