
小型智能水稻直播机研究与设计*
2021-11-13 13:20周小波刘征明吴志强何俊峰张艳向智宗谢崇平
四川农业与农机 2021年5期
周小波刘征明吴志强何俊峰张艳向智宗谢崇平
1.四川省农业机械研究设计院,四川成都
2.四川水稻创新团队,四川成都
3.四川省农机鉴定站,四川成都
4.四川省德姆达机电科技有限公司,四川成都
0 引言
加快推进水稻生产全程机械化,对于减轻劳动强度,提高粮食产量,保证粮食安全,促进农业节本增效、提高农民收入,促进农村劳动力转移、加快城市化和工业化进程具有重要的意义。[1-4]目前,四川在平原区和大田块中,已经采用无人机直播和拖拉机带动的8行水稻直播机直播等技术,取得了较好的效果。研究适合丘陵山区田块使用的水稻直播机,对于进一步提高四川水稻全程机械化水平具有重要意义。本设计针对丘陵山区条田的特点,设计了一款以锂电池为动力的遥控4行水稻直播机。
1 总体方案
1.1 设计依据
为满足丘区条田播幅窄、机具转弯半径小的作业要求,提出了一种四行小型电动遥控水稻直播机,采用锂电池驱动电机行走,控制采用4G网络远程遥控,组成部分主要包括行走装置、控制装置、排种装置。主要的设计控制参数为机组整体重量≤80 kg,作业效率≥0.20 hm2/h,漏播率≤5.0%,载种量≥2 kg,连续工作时间≥2 h。
1.2 整机结构
四行小型电动遥控水稻直播机结构如图1所示,整机结构左右对称,重心居中且位于底盘主梁上,主要包括精量播种器、动力底盘装置、控制装置3个部分,精量播种器采用湖北永祥农机稻油4行精量播种器,幅宽1 m(可调),行距25 cm(可调),播种器后置有利于排种管件的布置,种箱尺寸410 mm×350 mm×220 mm,排种装置位于种箱正下方,利用稻种自身重力排种。动力底盘采用三个水田轮,前轮转向,三轮独立驱动,前轮由电机直接驱动,后轮由独立电机、链轮、链条驱动,半轴连接。整机三维尺寸为1 900 mm×790 mm×1 365 mm。

图1 四行小型电动遥控水稻直播机结构图
1.3 工作原理
直播机工作时,种箱中的稻种经槽轮式排种装置连续排出,在精量排种装置出口被风机产生的气流送到排种管,在气流作用下,均匀稳定地经各排种管,成条地落入播种行。行走过程中,采用雷达定位,排种器根据定位控制水稻播种,雷达定位精度能达5 cm。三轮独立电机驱动,实现小半径转弯,转向直流电机控制转向操作杆,控制转向,精准控制转向角度。控制采用4G连接后台服务器,通过手机App控制直播机行走和转向。
2 关键参数确定
2.1 管径
排种管径是直播机的基准结构参数,根据稻种的物理特性和在气流输送过程中的悬浮速度,通过计算,确定排种管管径为25 mm。
2.2 电池容量
要满足整体设备连续运行大于2 h的要求,需要合理配置锂电池。经过统计和初步测算,精量播种器功率为340 W,电压为DC 12 V,所需容量为56.67 A·h;行走轮功率为1 460 W,电压为DC 24 V所需容量为121.58 A·h,选配两组120 A·h锂电池并联,输出电压为DC 24 V。精量播种器通过变压器与电池连接。电机控制接线图如图2所示,控制回路接线图如图3所示。
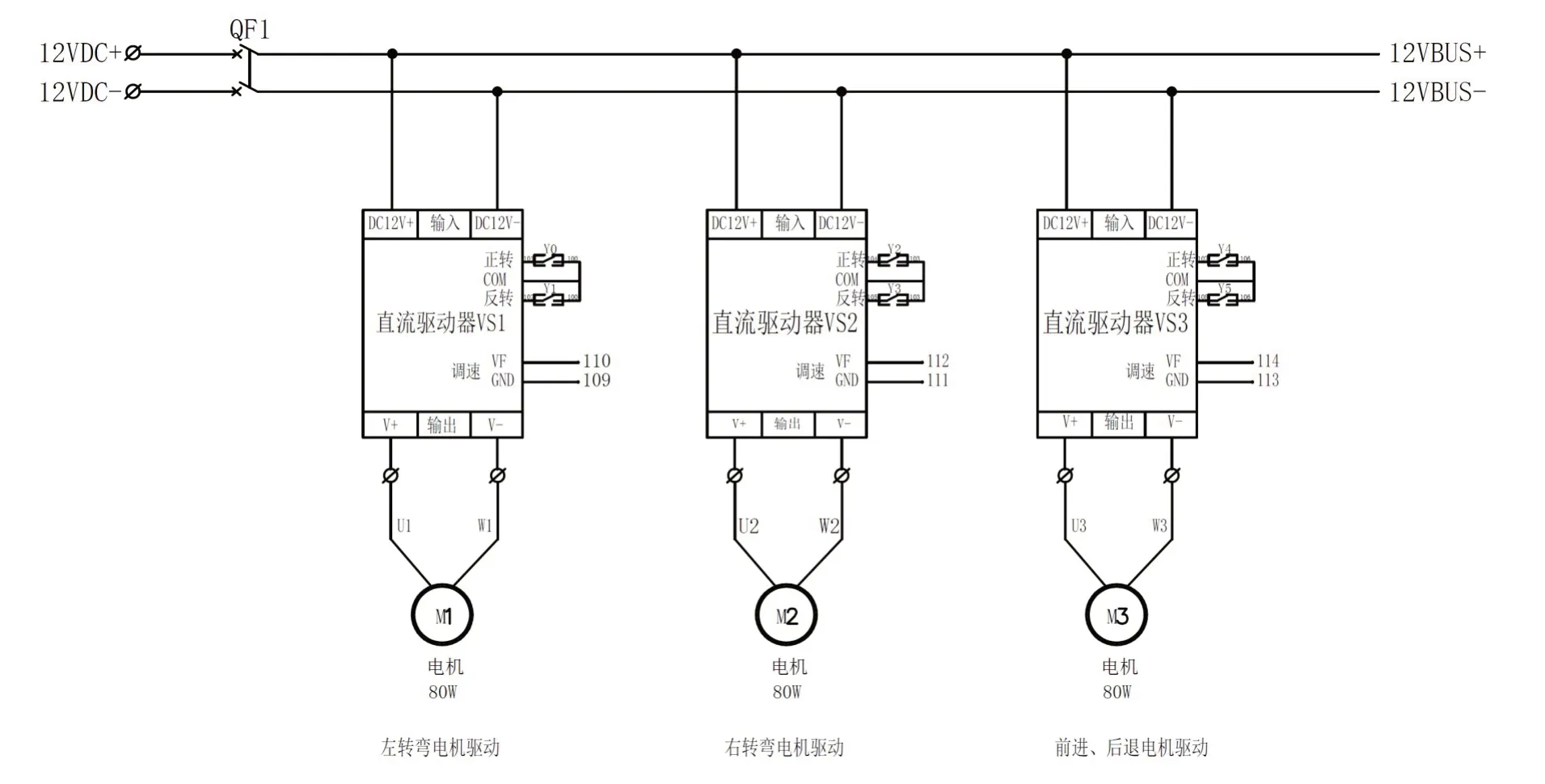
图2 电机控制电机接线图

图3 控制回路接线图
2.3 行走轮直径
四川冬水田水层深度8~11 cm、泥脚深度28~30 cm[5],综合考虑结构尺寸和整体平衡,前轮选用半径为375 mm的水田轮,后轮选用半径为450 mm的水田轮,由于前后轮直径不同,前轮采用电机直接驱动,后轮采用链条传动,传动比根据两轮的大小差别进行调速驱动,使得前后轮轮沿线速度误差小于1%。
3 关键部件设计
3.1 转向机构
前轮转向通过直流电机带动蜗轮蜗杆,选用1∶40蜗轮蜗杆,蜗杆为120齿,蜗杆每齿转动对应前轮转动角度为3°,通过电机电源换向,实现左右转弯。转弯极限角度为左右各45°。转向末端设限位块,防止超限过转。
3.2 后轮驱动机构
后轮通过直流电机带动小链轮,小链轮与大链轮之间用链条传动。电机转速为1 400 r/min,后轮直径为900 mm,按照车体最大行走速度5 km/h设计,链轮直径比为1∶2.5。水稻直播机整体外观如图4所示。

图4 水稻直播机外观
4 评价和结论
通过测试和试验表明,机组整体重量为78 kg,作业效率为0.24 hm2/h,漏播率为3.3%,载种量为8 kg,连续工作时间为2.3 h,各项指标均达到了设计要求。排种器通过雷达定位测量控制机组位和水稻播种,实现了精准播种,减小了水田作业中由于轮子打滑造成的播种误差,通过三轮独立电机驱动,减小了机组田间转弯半径,电池续航历程超过2 h,整体机组重量轻、移动方便、转向精准、漏播率小、播种精准,适合丘陵山区条田中水稻直播使用。测试试验中发现,由于操作人员离机组太远,导致其对周围情况识别有难度,下一步将在此基础上,增加视频监控功能,通过视频观察机器运行情况,从而精确给出操作指令,防止对机器误操作。
猜你喜欢
农业装备与车辆工程(2022年3期)2022-10-30
汽车维护与修理(2022年5期)2022-09-06
农业工程学报(2022年6期)2022-06-27
农业工程学报(2022年6期)2022-06-27
农业工程学报(2022年5期)2022-06-22
煤(2022年6期)2022-06-13
科技与创新(2020年15期)2020-08-12
小学生学习指导·爆笑校园(2019年6期)2019-09-10
汽车维修技师(2018年8期)2019-01-15
发明与创新·中学生(2017年7期)2017-07-10
