
5×5棒束通道局部阻塞流场实验研究
2021-11-11 08:06于晓勇祁沛垚乔守旭王啸宇谭思超
原子能科学技术 2021年11期
于晓勇,祁沛垚,2,乔守旭,王啸宇,邓 坚,谭思超,*
(1.黑龙江省核动力装置性能与设备重点实验室,哈尔滨工程大学,黑龙江 哈尔滨 150001;2.西安热工研究院有限公司,陕西 西安 710054;3.中国核动力研究设计院,四川 成都 610041)
棒束燃料元件结构紧凑,流道狭窄,承受着复杂的机械载荷。当燃料元件长时间受到辐照发生肿胀、弯曲或堆内材料碎片、腐蚀产物随冷却剂流入堆芯等条件下可能会造成流道阻塞事故。当发生流道阻塞事故时,由于流道内阻力增大,冷却剂流量减小,造成冷却剂输热能力减弱,引起堆芯传热恶化[1]。因此,有必要针对局部阻塞条件下棒束通道内的流场及阻力特性进行研究。
目前,针对流道阻塞事故的研究主要从实验研究和数值模拟两方面开展。Kikuchi等[1]研究了非沸腾条件下阻塞物下游的温度分布;Miyazaki等[2]以钠为工质测量了流道阻塞后温度的波动;Sudo等[3]研究了流动阻塞对压水堆失水事故堆芯换热的影响。以上实验均从换热特性方面对阻塞事故进行了研究,并未从流动特性机理方面进行分析,其原因可能是阻塞后流场特性复杂,开展实验较为困难,所以实验数据较少,不能给CFD做验证。其次实验研究中阻塞方式较单一,除Ohtsubo等[4]对单、双、三通道阻塞进行了实验外,其余实验均对单一阻塞率进行了研究,实际阻塞事故的发生具有随机性。因此棒束通道局部阻塞流场实验有必要针对不同阻塞类型开展相关研究。部分数值模拟[5-6]建立模型和结果的可靠性以及准确性需要验证,局部阻塞条件下棒束通道流场特性的实验研究可为CFD提供真实可靠的实验数据。综上,本文采用粒子图像测速(PIV)技术测量边、角、中心子通道在阻塞条件下的流场及压力数据,分析在不同类型局部阻塞条件下棒束通道内的流场特性以及压力特性。
1 实验装置
1.1 实验回路
棒束通道局部阻塞实验系统由流动回路、可视化局部阻塞实验本体、数据采集系统、光路成像系统等组成,如图1所示。使用去离子水作为实验工质,在常压常温条件下进行实验,离心泵驱动去离子水从水箱流经电磁流量计由下腔室进入棒束通道实验本体,流经实验段后从上腔室流出至水箱完成循环。
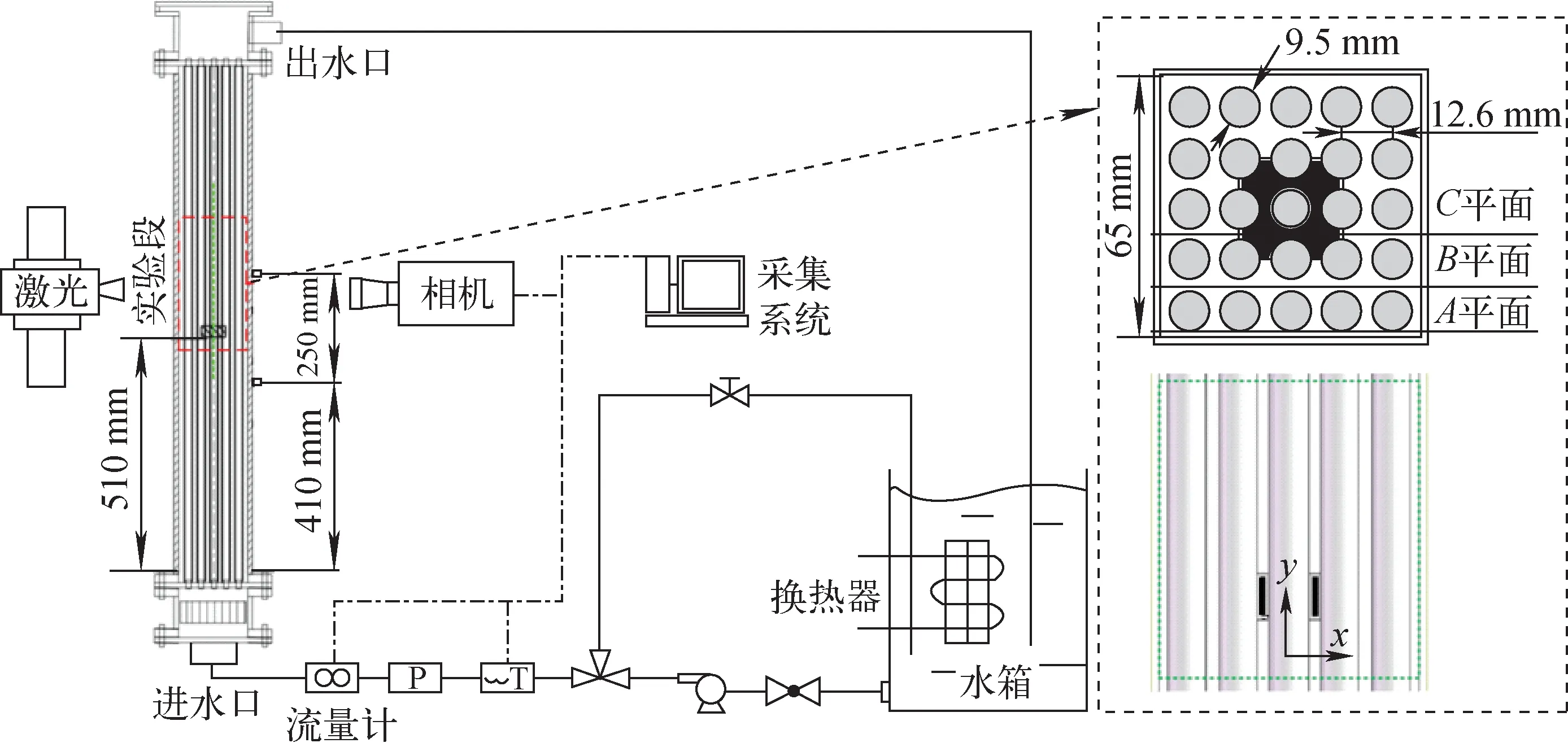
图1 实验回路系统
1.2 阻塞物
阻塞常发生在燃料元件辐照肿胀或发生弯曲、堆内材料碎片或腐蚀产物随冷却剂流入堆芯等事故工况下,因此棒束通道内不同位置均可能发生阻塞。Salama等[7]、Davari等[8]在进行CFD模拟计算时,均假设阻塞是由燃料板向内弯曲而导致的。对于本文研究的棒束燃料元件,局部阻塞发生在流道内的位置以及阻塞面积具有随机性。为尽可能模拟燃料元件真实状态,本实验根据子通道类型设计3种子通道阻塞模型,每种阻塞模型又分别设置不同阻塞率进行对比。
阻塞物分为边、角、中心子通道3种类型,共8个子通道阻塞模型,如图2所示。阻塞物采用有机玻璃材质,厚度为12 mm。为消除入口段影响,实验测量应在充分发展区域,如图1所示,阻塞物设置在距离进水口510 mm处,棒束通道水力直径(Dh)为9.752 mm。

a——边子通道;b——角子通道;c——中心子通道
2 实验测量及误差分析
2.1 PIV实验测量
PIV测量系统由可移动光学平台、连续激光器、高速相机以及控制系统等组成。棒束通道内流场行为复杂多变,实验选择聚酰胺颗粒作为示踪粒子,粒子直径为10 μm、密度为1.04 g/mL,斯托克斯数为0.000 6≪1[9],示踪性能良好。为提高测量精度并降低相机镜头带来图像的畸变,实验采用远心镜头进行测量,高速相机的拍摄速度为4 000帧/s。获得拍摄图像后,需进行图像预处理,包括去除背景噪声、边界识别等。实验数据后处理采用商用二维PIV处理软件Davis,初始互相关计算窗口为64×64像素,最终计算窗口为16×16像素,窗口内的粒子数量为5~10个,窗口重叠率为50%,实际分辨率为0.15 mm×0.15 mm。
2.2 实验工况
通过调节旁通阀开度及变频器频率建立不同实验工况,通过流量计及温度计监视流动工况。实验参数列于表1,选择1、3、5、7 m3/h 4个工况进行PIV测量实验。每个工况分别测量平面A、B、C的流场信息。PIV测量平面如图1所示,平面A、B、C为棒束间隙,坐标位置分别为x=31.225、18.9、6.3 mm。为消除入口效应的影响,压力数据的采集位于充分发展区域。在阻塞物下游会产生较大范围的回流及尾流区域,因此将实验压降测量截面设置在阻塞物上游100 mm及下游150 mm处,如图1所示,引压孔距入口410 mm,间距为250 mm。首先测量了雷诺数(Re)为450~8 500、不带阻塞物的实验段压降,即摩擦阻力压降,然后在局部阻塞条件下测量了实验段的总压降。

表1 PIV实验工况设置
2.3 误差分析
PIV测量误差的来源包含坐标标定误差、实际图像的误差、成像像素的误差等。李兴等[10]对本实验系统PIV测量误差进行了详细研究,得出主流速为1 m/s时速度测量总不确定度为6.9%。棒束通道内PIV速度测量的不确定度按照日本可视化协会推荐的误差分析方法[11]进行,得出本实验最大误差约为5.7%。压降测量的误差取决于测量过程中仪器在测量范围内的精度,本实验测量参数均在仪表量程之内。流量测量使用KROHNE OPTIFLUX4000,不确定度为±0.37%;温度测量使用JWB/Pt100,不确定度为±0.5%,实验段压降测量使用Honeywell STD800,不确定度为±0.035%。
3 实验结果及分析
PIV实验获得了棒束通道在边、角及中心子通道阻塞条件下,工况1~4测量平面A、B、C的流场数据。阻塞后的瞬时流场复杂多变,为研究局部阻塞对流道内流场结构的影响,将所得到的瞬态实验数据进行时域平均,结合瞬时流场数据及时均流场数据对阻塞后的流场结构进行分析。
3.1 中心通道阻塞
中心子通道阻塞条件下工况4平面C的时均流线图示于图3,主流在阻塞物上游发生分离,绕过阻塞物流向下游,在阻塞物上游并没有漩涡生成。主流绕过阻塞物两角后在两侧形成漩涡并逐渐扩大,达到一定程度后脱落并在下游形成回流区,流体在回流区后重新汇流。由图3可见,回流区分布有两个明显且旋转方向相反的漩涡,漩涡尺寸、影响范围随阻塞率的增加而明显增大。阻塞率为3.58%、14.33%下形成的回流区长度分别为2Dh及5Dh,阻塞率为57.32%时形成的回流区长度则在12Dh以上。

图3 中心子通道阻塞条件下工况4平面C的时均流线图
在中心子通道阻塞条件下,阻塞率对工况4平面C阻塞物下游1Dh处横向速度u及轴向速度v分布的影响示于图4。阻塞物使流道内产生漩涡,在一定程度上促进了流体间的横向搅浑,但这是针对阻塞物下游两侧主流区的,而阻塞物下游中心部分流体则流速变缓,并发生回流。图4b显示,随着阻塞率的增大,其对轴向速度的影响范围不断增大。阻塞率为57.32%时产生的回流轴向速度最大可达到主流速度的46.14%,回流速度较大,大幅降低了冷却剂与燃料棒之间热量的传递效率。
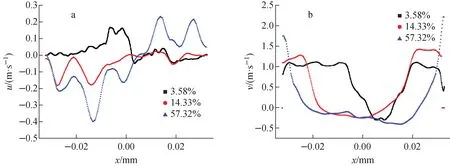
图4 不同阻塞率下工况4阻塞物下游1Dh处的速度分布
阻塞物下游形成的漩涡在整个流动过程中是不断变化的,图5示出了阻塞率为14.33%时工况4平面C两列漩涡的形成、发展以及耗散过程。可看到,流道内的瞬时流场结构与时均流场结构存在较大差别。瞬时流场结构不同于时均流场结构,存在非定常性。在整个过程中,漩涡不稳定,短时间具有随机性,漩涡结构呈现无序、混沌的特征,但从整个流动过程来看其流场特征具有重复性。由图5可见,t=0 s时,阻塞物下游((4~6)Dh)部分尾流区偏向左侧;t=0.25 s时,尾流区逐渐向右侧移动;t=0.5 s时,尾流区到达最右侧;t=0.75 s时,尾流区又逐渐向左侧移动,摆动周期约为1 s。阻塞物下游周期性地交替出现两列旋转方向相反的漩涡,这两列漩涡相互挤压、变形不断向下游扩散,从而导致了下游回流区随时间有规律的左右摆动。

图5 阻塞率为14.33%条件下工况4平面C的瞬时流线图
为研究流场结构随Re的变化规律,实验针对不同Re对流场进行了多次测量,14.33%阻塞率下工况1~4平面C的时均流线图示于图6。随着Re的增加,阻塞物下游左侧漩涡中心向下游移动并向下游扩散范围变大。一方面阻塞物所形成的漩涡沿垂直于流线方向扩散;另一方面漩涡也被流动带向下游,并不断衰减。Re越大,漩涡向径向的传播速度越小于向下游的传播速度[12]。当Re为1 085时,漩涡积聚在阻塞物附近。随着Re的增加,由于漩涡向径向的传播速度小于向下游的传播速度,因此可观察到左侧漩涡向下游的扩散范围变大。Re从1 085增加到7 627,交汇点约向下游移动了2Dh。虽然影响范围增大,但左侧漩涡向下游扩散,不再积聚在阻塞物正下游。考虑到两侧漩涡相互挤压,受左侧漩涡影响,随着Re的增大右侧漩涡向下游移动不明显。
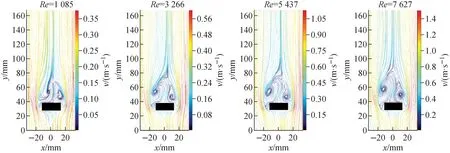
图6 阻塞率为14.33%条件下平面C的时均流线图
14.33%阻塞率下工况1~4平面C阻塞物下游1Dh的流速分布示于图7a,随着Re的增加,阻塞物下游附近流速增大,说明漩涡不再积聚在阻塞物正下游。因此当发生局部阻塞事故时,应尽可能使冷却剂的流量保持在一个较大的数值,以增加阻塞物下游的湍流程度,及时带走燃料元件的热量。14.33%阻塞率下工况1~4平面C中x=18.9 mm处(即第1、2列棒间隙)的横向速度u分布示于图7b。阻塞物使流道内产生横向速度,在阻塞物下游2Dh附近横向速度达到最大,之后缓慢衰减,在阻塞物下游约7Dh处横向速度衰减至0 m/s附近。
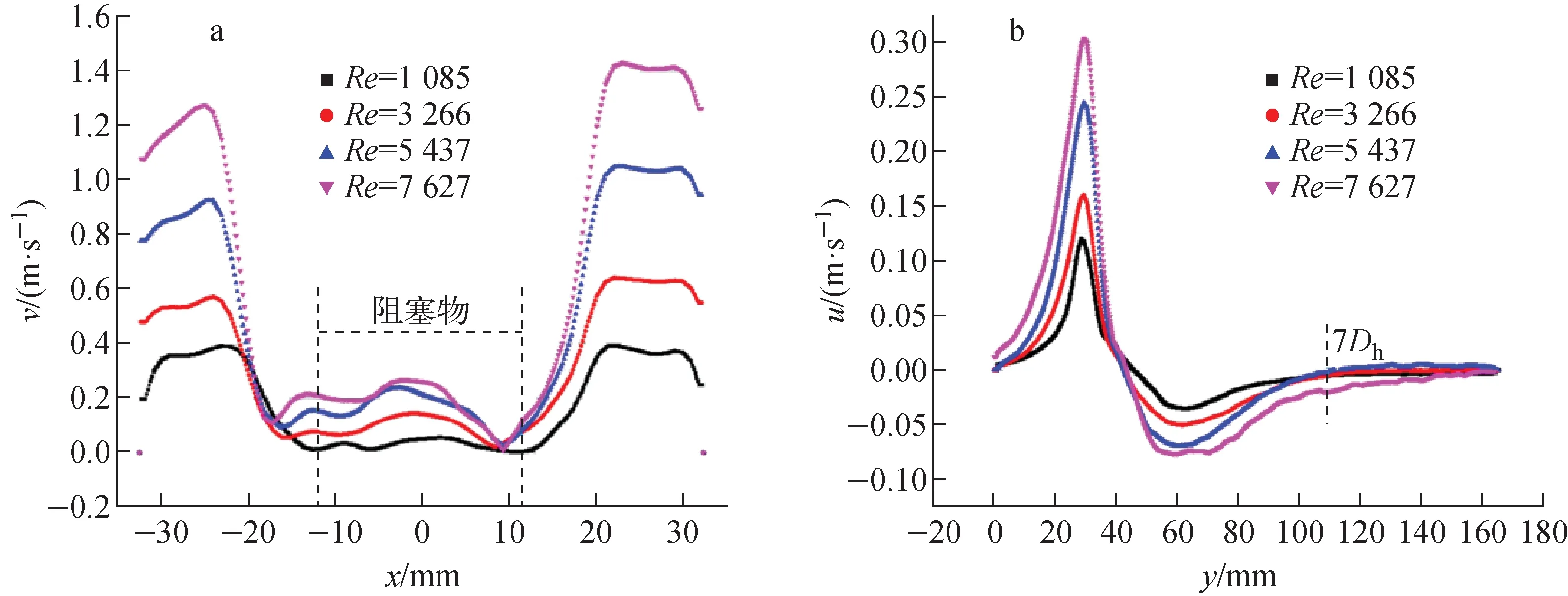
a——阻塞物下游1Dh处流速分布;b——x=18.9 mm处横向速度分布
3.2 边、角子通道阻塞
边子通道阻塞所形成的流场结构与中心子通道阻塞具有一定的相似性,图8为边子通道阻塞下工况4平面C的时均流线图。与中心子通道阻塞形成的流体结构类似,漩涡首先在阻塞物右侧壁面形成,增大到一定程度后脱落并在下游形成回流区。不同的是,边子通道阻塞所形成的回流区与壁面相接触,棒束通道壁面附近的漩涡形状不规则,分布不均匀。这是由于湍流以及壁面的影响,导致壁面附近的漩涡产生后很快就被撕裂、耗散。边子通道类型阻塞所形成的回流区流场结构较中心子通道阻塞更复杂。与边子通道阻塞类型类似,角子通道阻塞所形成的回流区同样与壁面相接触,由于壁面的作用,壁面附近的漩涡形状不规则。

图8 边子通道阻塞条件下工况4平面C时均流线图
3.3 压力场数据处理
3.3.1阻力系数理论计算公式 局部阻塞条件下棒束通道内的压降由摩擦压降Δpf、重力压降Δpg以及阻塞物引起的局部压降Δpsg组成,如式(1)所示。其中重力压降可根据密度与高度差计算获得,摩擦压降可通过测量不带阻塞物棒束通道内压降获得,局部压降可通过总压降减去摩擦压降及重力压降获得。
Δp=Δpf+Δpg+Δpsg
(1)
(2)
(3)
式中:λ为摩擦阻力系数;D为棒束通道当量直径;ρ为20 ℃去离子水密度;u为横截面瞬时速度;L为测压头间距;ζ为局部阻力系数。
3.3.2阻力特性分析 实验首先针对不带阻塞物棒束通道内的压降进行测量,根据式(2)计算得到棒束通道的摩擦阻力系数。Cheng等[13]针对正方形布置的光滑棒束通道提出了摩擦阻力系数计算方法,并给出了棒束通道内流态划分及转捩点Re的计算公式。将实验值与Cheng公式预测的摩擦阻力系数进行对比来验证实验的可靠性,如图9所示。结果显示,Re<2 000时,Cheng公式能很好地预测棒束通道内摩擦阻力系数。但随着雷诺数的增加,预测结果逐渐小于实验摩擦阻力系数。在雷诺数为750附近,摩擦阻力系数发生明显的改变,可认为本实验层流与过渡流转捩雷诺数约为750[14]。棒束通道内由于存在径向压差导致的横向流动,流道内湍流程度增强,促使转捩提前到来,因此本实验层流与过渡流转捩雷诺数较Cheng等[13]提出的划分准则所得转捩雷诺数(1 076)小。

图9 摩擦阻力系数实验值与经验公式对比
冷却剂在棒束通道内流动局部阻力主要由定位格架产生[15]。课题组前期针对定位格架的阻力特性进行了实验测量,得到了相关实验数据[16]。为研究阻塞物所引入的局部阻力系数的大小及规律,将其与定位格架所引入的局部阻力系数进行比较。根据式(3)计算得到不同阻塞类型下的局部阻力系数,与祁沛垚等[16]预测的定位格架局部阻力系数进行对比,如图10所示。结果表明,定位格架所造成的局部阻力系数与23.55%阻塞率的边通道阻塞及25.00%阻塞率的角通道阻塞的局部阻力系数曲线误差较小。Re<750时,阻塞物所形成的局部阻力系数随Re的增大相比于定位格架减小快。这是由于Re较小时,阻塞物下游形成的漩涡积聚在阻塞物正下游附近,随着Re的增大,漩涡逐渐向下游扩散,此阶段局部阻力系数减小较快。但随着Re的继续增大,阻塞物所形成的局部阻力系数曲线相对于定位格架变化较平缓。由于定位格架上的搅混翼片等结构可促进流体搅混[17],因此在Re>750之后,定位格架的局部阻力系数随着Re的增大变化较快。由中心子通道阻塞局部阻力随雷诺数的变化可见,压降随阻塞率的增加而增大,导致局部阻力系数随阻塞率的增加而增大。但呈4倍比例增加的阻塞面积所造成的局部阻力系数并不是简单的线性增加关系。

图10 不同阻塞类型局部阻力系数对比
4 结论
本文针对局部阻塞条件下5×5棒束通道内流场特性以及压力特性进行了实验研究,得到如下主要结论。
1) 阻塞物下游流体产生回流并分布有漩涡,漩涡的尺寸、影响范围随着阻塞率的增加而增加。
2) 阻塞条件下的瞬时流场结构不同于时均流场结构呈现非定常性。瞬时流线图显示,回流区内的漩涡不稳定,短时间具有随机性,但从整个流动过程来看其流场特征具有重复性。
3) 中心子通道阻塞在回流区形成了两列旋转方向相反的漩涡,随着Re的增加,阻塞物下游左侧漩涡中心向下游移动且扩散范围变大。
4) 由于湍流和壁面作用,边、角子通道阻塞在棒束通道壁面附近形成的漩涡形状不规则、分布不均匀。
5) 局部阻力系数随阻塞率的增加呈非线性增加趋势。阻塞物的局部阻力系数与定位格架相比,Re<750时随Re增加减小较快;Re>750时减小较为平缓。
猜你喜欢
大电机技术(2021年2期)2021-07-21
茶叶学报(2019年2期)2019-10-28
汽车观察(2018年10期)2018-11-06
中外文摘(2017年19期)2017-10-10
广东农业科学(2017年5期)2017-08-29
海洋信息技术与应用(2017年2期)2017-06-21
中国卫生(2016年4期)2016-11-12
原子能科学技术(2015年11期)2016-01-11
中国石油大学学报(自然科学版)(2015年2期)2015-11-10
专用汽车(2015年8期)2015-03-01
