
全息影像技术在泌尿外科机器人辅助腹腔镜手术中的应用
2021-11-10 03:06邢金春秦家轩吴准
现代泌尿生殖肿瘤杂志 2021年3期
邢金春 秦家轩 吴准
医学全息影像技术是通过相关处理软件,将2D医学图像重建成包含更多信息的3D虚拟模型,同时通过混合现实设备将3D虚拟模型导入真实世界并与之进行交互,从而辅助临床诊断及治疗过程的一项新兴技术。“全息”即“全部信息”,由CT或MRI增强扫描图像重建获得的全息影像能够更直观地显示病灶的大小、形态、位置、与周围组织结构的关系、供血血管情况等。全息影像技术在外科手术的术前、术中能够发挥重要的辅助作用,通过全息影像浏览软件,术者可以将3D虚拟模型和真实术野进行认知融合;通过头戴混合现实设备或达芬奇机器人手术系统,术者可以将3D虚拟模型和真实术野进行实时影像融合。全息影像技术在泌尿外科机器人辅助腹腔镜手术,尤其是在保留肾单位的肾部分切除术[1-15]、复杂腹膜后及肾上腺肿瘤手术[16-22]和前列腺癌根治术[23-29]中发挥着重要的辅助作用。
一、全息影像技术的建立和应用
1.全息影像技术的建立:将患者医学数字成像和通信(digital imaging and communications in medicine, DICOM)格式的CT或MRI增强扫描图像上传至全息影像重建工作站,由专业工程师结合患者的病情及临床需求重建全息影像,主管医师需与专业工程师保持沟通,给予临床信息支持并提出临床实际需求,对全息影像结果进行核查验收。
主管医师在术前通过全息影像工作站下载并查看重建的全息影像文件。术中通过视频输入、输出端口连接线将全息影像工作站与达芬奇机器人手术系统相连接,将全息影像实时投影、融合在术野图像中(融合影像在达芬奇机器人手术系统术者目镜和全息影像工作站同步显示),从而实现术中导航(图1A)。

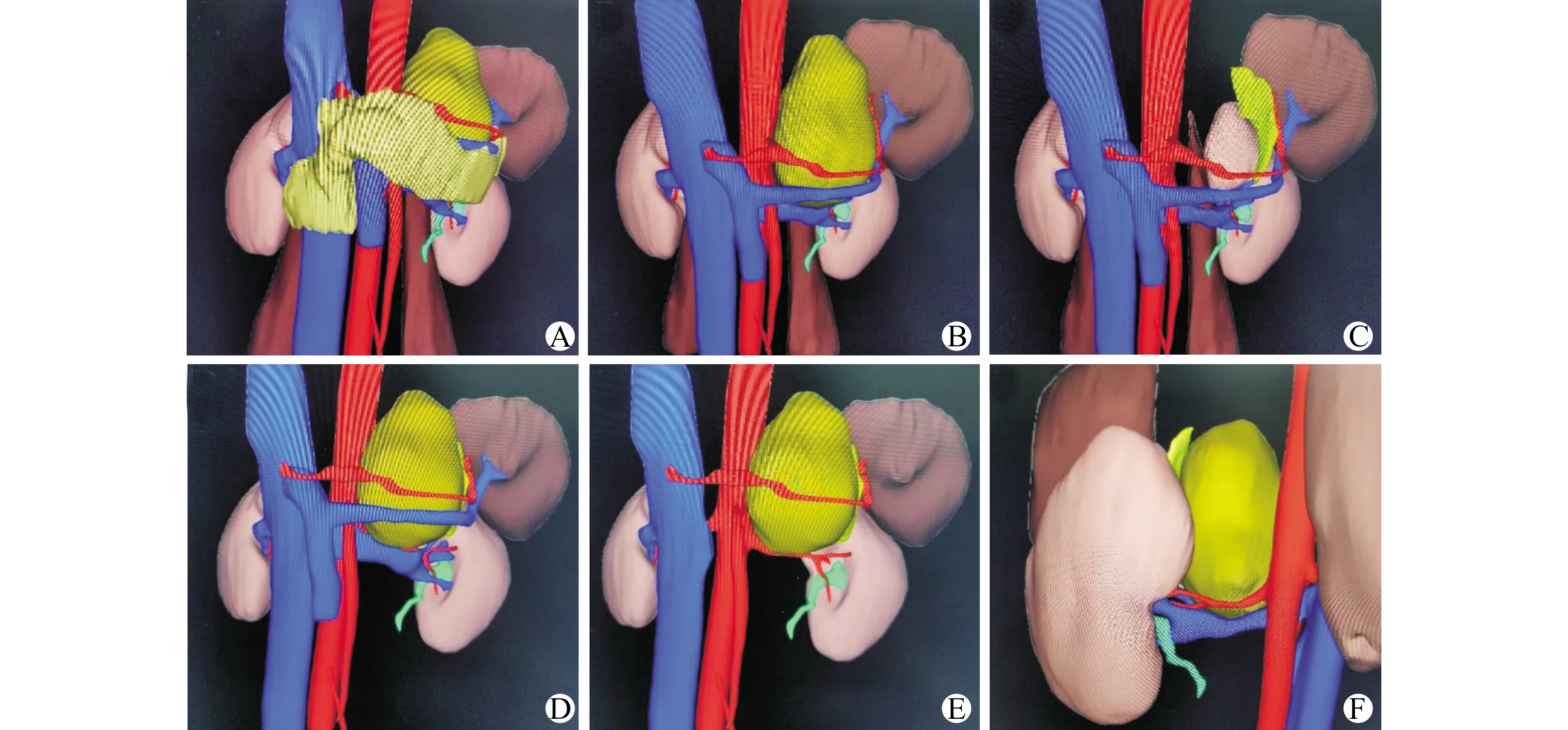
A:融合影像在达芬奇机器人手术系统和全息影像工作站同步显示,实现术中导航;B、C:肾肿瘤隐藏前后对比,显示肿瘤深度、肿瘤的肾内部分形态;D、E:腹侧观,肾静脉隐藏前后对比,显示肾动、静脉血管及其分支、变异情况;F:背侧观(黄色为肿瘤,蓝色为静脉,红色为动脉,绿色为肾盂、输尿管)图1 左肾下极肿瘤全息影像
相关文件的上传、下载、查看等操作均需要在登录终端设备(全息影像工作站)所安装的图像传输和浏览软件中来完成,用于保护患者隐私及数据安全。
2.全息影像技术的术前应用:全息影像具有三维立体、可全角度旋转、可自由放大缩小、组织结构以不同颜色标识、可自由调节透明度或隐藏拆解等特点,能够更直观地显示病灶的大小、形态、位置,以及与周围组织结构的毗邻关系、供血血管情况,在手术前能够发挥重要的辅助作用。辅助规划手术方案:结合全息影像拟定手术入路(如经腹腔/经腹膜后腔),布局穿刺器(Trocar)的位置,预估手术切除范围,规划供血血管阻断方案;辅助预估手术难度及风险:结合全息影像所显示的病灶与周围血管、脏器之间的关系,预估手术难点,以及可能损伤的重要组织结构(如肾蒂、输尿管、腔静脉、腹腔干、脾血管、十二指肠等)和可能联合切除的脏器;辅助医患沟通:通过全息影像更直观地向患者及家属介绍病情、手术方案、手术难度及风险。
3.全息影像技术的术中应用:术中将全息影像实时投影、融合在术野图像中,可辅助辨识病灶的位置、范围、深度、供血血管情况以及重要的毗邻组织结构,从而实现术中辅助导航定位,提高手术精准度。融合影像在达芬奇机器人手术系统和全息影像工作站中同步显示,使术者和助手实时同步参与全息影像的术中辅助导航定位过程(图2)。

A:机器人肾部分切除术的辅助导航定位;B.机器人前列腺癌根治术的辅助导航定位图2 全息融合影像在术中辅助导航定位
二、全息影像技术在泌尿外科机器人辅助腹腔镜手术中的应用
1.全息影像技术在机器人辅助腹腔镜肾部分切除术中的应用:全息影像能够更直观地显示肾肿瘤的大小、形态、位置、深度及供血血管情况[1],辅助评定R.E.N.A.L.评分。术前结合全息影像,可以辅助评估肾部分切除术的可行性[2]及术后尿漏等并发症发生的风险,选择手术入路(经腹腔/经腹膜后腔),布局穿刺器(Trocar)位置(肾下极肿瘤的Trocar位置适当下移),预估手术切除深度(是否达集合系统或肾窦),拟定肾动脉阻断方案(根据肾动脉分支、变异情况和肿瘤供血情况,选择全阻断、选择性阻断、超选择性阻断或无阻断方案[3-5]),预估可能损伤的重要组织结构(如肾窦、输尿管、肾上腺、十二指肠、腔静脉、脾血管等),利于辅助医患沟通。术中全息影像技术辅助导航定位:辅助定位肾肿瘤的位置、深度,尤其是完全内生型肾肿瘤[6-7];辅助定位、辨识、暴露肾动、静脉及其分支血管,便于供血血管阻断;辅助辨识重要组织结构,减少不必要的损伤(图1B~1F,图2A)[8-11]。武鹏等[12]回顾性分析了其单中心行全息影像技术引导机器人辅助腹腔镜肾部分切除术治疗的15例完全内生型肾肿瘤患者的临床资料,均顺利完成手术,无中转开放及大血管损伤病例,无漏尿及切缘阳性病例,平均随访9个月无局部复发及转移病例。朱刚等[13]回顾性分析了国内19家医疗中心行全息影像技术引导机器人辅助腹腔镜肾部分切除术治疗的51例肾肿瘤患者的临床资料,其中23例有可统计的临床数据,术中无周围重要脏器损伤,无Clavien Ⅱ级及以上并发症,全息影像技术可以帮助术者确定脂肪组织下的肾血管位置、分支情况,帮助术者识别肿瘤与集合系统、肾实质、血管的相互位置,帮助术者定位完全内生型肾肿瘤及确定切除边界。王亚楠等[14]回顾性分析了其单中心接受全息影像技术引导机器人辅助腹腔镜肾部分切除术治疗的11例(与朱刚等研究中纳入的6例患者存在重叠可能)肾门部肿瘤患者的临床资料,R.E.N.A.L.评分为8~12分(平均10.7分),均顺利剜除肿瘤、完成手术,无术后发热、继发出血或漏尿等并发症,无切缘阳性病例,术后3个月复查肾脏增强CT未见复发。Huang等[15]回顾性分析了其单中心接受机器人辅助腹腔镜或单纯腹腔镜保留肾单位手术治疗的113例肾窦肿瘤(指50%以上体积位于肾窦内的肾肿瘤)患者的临床资料,并结合全息影像,首次提出针对肾窦肿瘤的“ROADS”评分系统,使此类复杂肾肿瘤保肾成功率升至97.5%,严重并发症发生率降至7.9%。
2.全息影像技术在机器人辅助腹腔镜腹膜后及肾上腺肿瘤切除术中的应用:原发性腹膜后肿瘤中,约30%为良性肿瘤(如神经鞘瘤、纤维瘤、畸胎瘤等),约70%为恶性肿瘤(如脂肪肉瘤、纤维肉瘤、神经纤维肉瘤、恶性淋巴瘤等),多数原发性腹膜后肿瘤早期无症状、发现时肿瘤体积偏大[16-17]。原发性腹膜后肿瘤位置深,病理类型多样且生物学行为各异,当肿瘤包绕粘连重要血管、神经、脏器、肌肉时,处理非常棘手[16-17]。大体积肾上腺肿瘤、瘤体功能强大(如嗜铬细胞瘤、皮脂腺癌等)、瘤体位置特殊(如异位肾上腺肿瘤、肿瘤毗邻重要组织结构等)或瘤体与周围界限欠清晰(如原发恶性肿瘤、浸润性生长的肿瘤、转移瘤、既往手术史等)的肾上腺肿瘤,手术难度大、风险高。
术前结合全息影像可以辅助拟定手术入路(经腹腔/经腹膜后腔),调整穿刺器(Trocar)位置,预估可能损伤的重要组织结构(如肾蒂、输尿管、腔静脉、腹腔干、脾血管、十二指肠、肾上腺等),预估可能的联合脏器切除(如肾脏、肾上腺、脾脏,甚至部分血管等),辅助医患沟通[18-20]。术中全息影像技术辅助导航定位:辅助定位肿瘤的位置,辅助定位、辨识、暴露重要组织结构,减少不必要的损伤[18-22](图3)。
A~E:腹侧观;F:背侧观(黄色为肿瘤,淡黄色为胰腺,金黄色为肾上腺)图3 全息影像显示左腹膜后肿瘤紧邻肾蒂上缘、腹主动脉及腹腔干,肿瘤前方被脾血管包绕
3.全息影像技术在机器人辅助腹腔镜前列腺癌根治术中的应用:术前通过全息影像可以辅助预估保留前列腺神经血管束的可行性,预估手术难度及风险,辅助医患沟通。术中全息影像技术辅助导航定位:①辅助定位前列腺肿瘤的位置,降低切缘阳性率;②辅助定位、辨识前列腺神经血管束,减少损伤;③辅助定位、辨识前列腺底部与膀胱颈的交界、前列腺尖部与尿道的交界,避免肿瘤组织残留;④辅助定位、辨识重要组织结构(如输尿管、髂血管、闭孔神经等),减少不必要的损伤;⑤辅助定位、辨识可疑淋巴结,辅助淋巴结清扫(图2B)[23-29]。Porpiglia等[24-26]先后发表多篇相关研究文献,分析了其单中心接受全息影像技术引导机器人辅助腹腔镜前列腺癌根治术治疗的30例患者的临床资料,结果提示该技术安全有效,并进一步引入弹性3D虚拟模型来优化其全息影像技术。Mehralivand等[27](10例)、Schiavina等[28](26例)、朱刚等[29](5例)随后也发表了全息影像技术引导机器人辅助腹腔镜前列腺癌根治术的相关研究结果,均提示全息影像技术可在术前、术中发挥重要的辅助作用。
三、展望
全息影像技术作为一项新兴的临床影像技术,近年来在泌尿外科手术的术前、术中发挥着越来越重要的辅助作用。通过全息影像技术,术者可以在术前更精确规划手术方案、预估手术难度及风险,便于医患沟通等。术中利用全息影像技术辅助导航定位,提高手术的精准度,并增加手术的安全性。随着全息影像技术越来越多地应用于机器人辅助腹腔镜肾部分切除术、腹膜后及肾上腺肿瘤切除术、前列腺癌根治术和膀胱癌、脐尿管癌根治术[13]等,该技术在泌尿外科机器人辅助腹腔镜手术中的重要辅助作用及应用价值将得到更好体现。
猜你喜欢
工业设计(2022年9期)2022-10-13
腹腔镜外科杂志(2022年7期)2022-08-16
军事文摘(2022年8期)2022-05-25
中国典型病例大全(2022年7期)2022-04-22
现代临床医学(2022年1期)2022-02-12
知识就是力量(2021年9期)2021-09-18
健康之家(2021年19期)2021-05-23
中学数学杂志(初中版)(2017年4期)2017-08-28
发明与创新·大科技(2017年7期)2017-07-17
江苏教育·中学教学版(2014年2期)2014-03-19
