基于SR 机构的微位移平台的设计及有限元分析*
2021-11-08 10:10许泽宇沈剑英何安康
科技创新与应用 2021年30期
许泽宇,沈剑英,来 榕,何安康
(嘉兴学院 机械工程学院,浙江 嘉兴 314001)
精密微位移技术在精密加工[1]、原子力显微镜[2]、精密移测量[3]、仿生科技[4]等领域得到了广泛的应用,压电式精密位移平台是实现微位移的重要装置,它由压电微位移驱动器来产生位移,由于该位移很小,所以还需柔性铰链放大机构来放大压电驱动器的输出位移。
本文设计了一种压电式二维微位移平台,采用SR机构来放大压电驱动器的输出位移。
1 二维微位移平台的结构设计
图1 是设计的压电式二维微位移平台,中间正方形部分是微动台,四周部分为这个微位移平台的基座,基座与连杆LG1 之间是x 方向的SR 机构,基座与连杆LG4 之间是y 方向的SR 机构,SR 机构用来放大压驱动器的输出位移。连杆LG2、LG7 和连杆LG4、LG8对称布置,组成微动台沿x 方向运动的导向机构;连杆LG1、LG5 和连杆LG3、LG6 对称布置,组成微动台沿y方向运动的导向机构。

图1 二维微位移平台的结构示意图
可见,微动台能够实现x、y 方向的微位移,在这两个方向上实现微位移的过程完全一样,每个方向都有一个SK 机构来放大压电驱动器的输出位移。下面以y方向的微位移说明,柔性铰链A 是平台的位移输入点,柔性铰链B 是SR 机构位移输出点,SR 机构通过连杆LG4 推动微动台沿y 方向运动,所以,SR 机构的输出位移就是微动台的位移。微动台中的柔性铰链都有一样的结构,见图2。

图2 柔性铰链
2 SR 机构的放大倍数
如图3 是SR 机构的结构示意图,图中l=25mm,q=8mm,由文献[5]得SR 机构理论上的放大倍数是:假设压电驱动器的输出位移是Δ,则SR 放大机构的理论输出位移是y=λΔ。


图3 SR 机构示意图
3 有限元分析
SolidWorks 是一套机械设计的三维软件,采用用户熟悉的图形界面,操作方便、简单容易学,广泛应用于机械、汽车和航空领域。SolidWorks Simulation 是一个与SolidWorks 完全集成的有限元分析系统,能为分析人员提供系统及部件级分析、多领域的全面分析、多场耦合分析,并能适应特殊行业及领域的需求。
为了验证设计方案,采用SolidWorks 中的simulation 模块进行有限元分析。分析步骤如下:
(1)建立微位移平台的实体模型,见图4;平台材料为普通碳钢,最大极限应力为220MPa,弹性模量为200GPa。
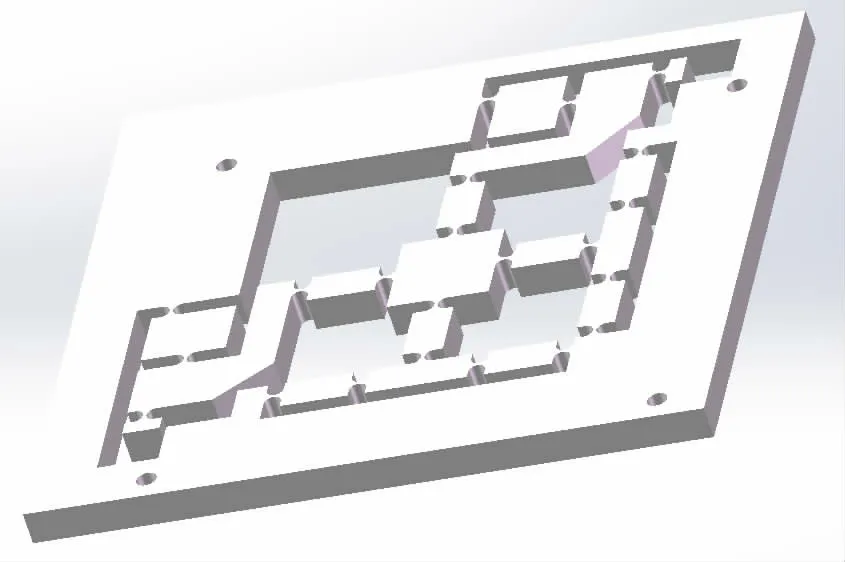
图4 微位移平台实体模型
(2)使用“夹具”功能对平台的四个安装孔位进行固定,限制位移,见图5。
(3)对平台划分网格,采用标线性四面体单元,见图6,单元数为1639464 个,节点为2348782 个。
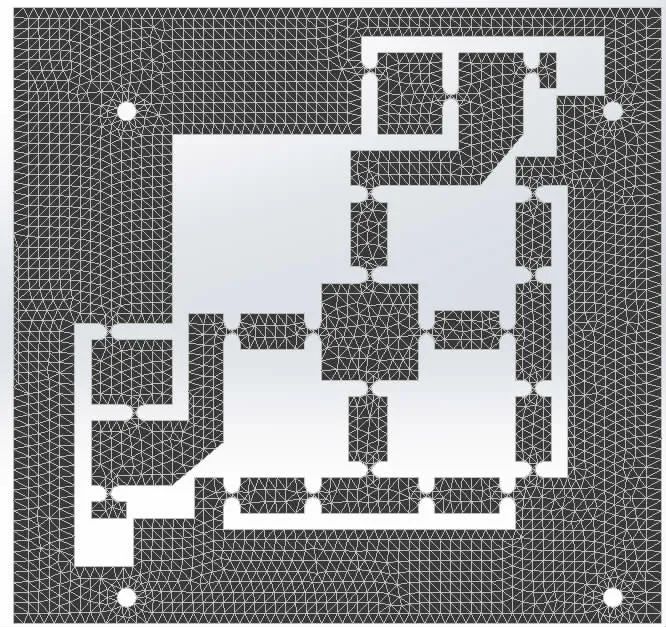
图6 网格图
(4)加载及得到位移和应力,根据实际工作情况,分为三种方式:
a. 仅在x 方向加载(图7),微动台产生y 方向的位移及应力,如图8 所示。
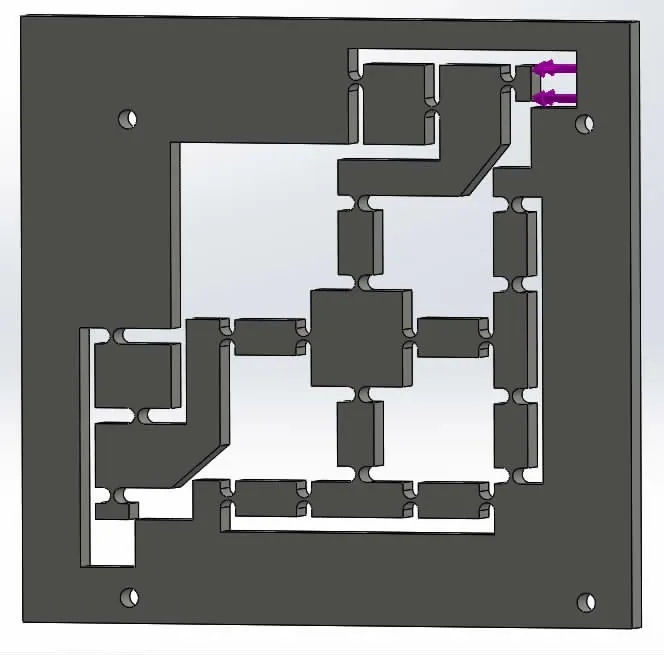
图7 仅在x 方向加载
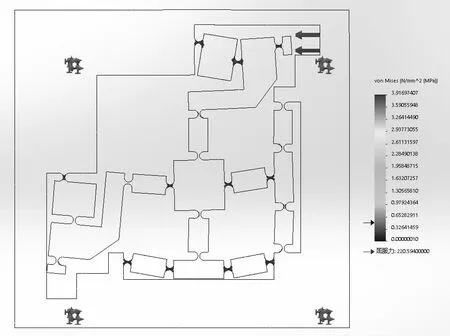
图8 仅在x 方向加载的位移及应力
b. 仅在y 方向加载,微动台产生x 方向的位移及应力,如图9 所示。

图9 仅在y 方向加载的位移及应力
c. 在x、y 方向同时加载,微动台在x、y 方向同时产生位移及应力,如图10 所示。

图10 x、y 方向同时加载的位移及应力
(5)计算微动台的放大倍数
为了与理论计算对比,设定加载力分别为50N、100N、400N;以仅在x 方向加载为例计算,根据图1 的标注,取点1、2 在x 方向上位移的平均值作为平台的初始位移,取微动台四个顶点3、4、5、6 在y方向上位移的平均值作为微动台的位移值,见表1。然后计算二者的比值,得到微动台有限元分析结果的放大倍数为2.23。这个结果小于理论值,存在误差的原因:SR 机构的输出位移通过连杆LG4 传递给微动台,它两端的柔性铰链沿轴向受压产生位移损失。

表1 平台有限元分析的结果
当加载力F=400N 时,最大应力接近材料的极限应力,而此时的输出位移为66μm,这个数值可以看作平台的最大位移值。
4 加工后的微动合实物
根据设计的尺寸,在一块钢板上采用数控电火花线切割机床进行加工,再在钻床上加工四个安装孔,如图11 所示。
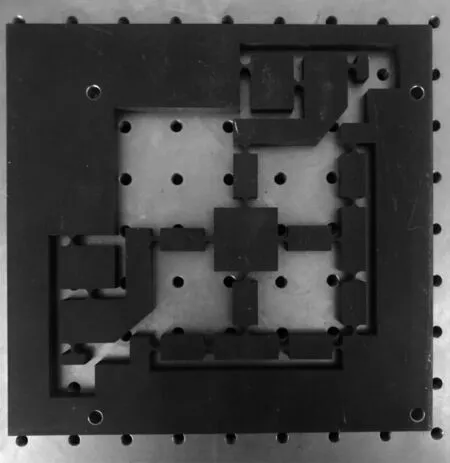
图11 微动台实物
加工用的是数控中走丝线切割机床,它结合自动控制及计算机技术而设计的机电一体化产品,该机床将一根钼丝作为电极,利用高频脉冲电源,对工件进行放电,在高温、高压下金属发生溶化或气化,从而达到加工的目的。
5 结束语
文章设计了一个压电式二维微位移平台,能够实现x、y 方向的微位移,并采用SR 机构来放大压电驱动器的初始位移。用SolidWorks 软件中的simulation 模块进行有限元分析,由于柔性铰链沿轴向受压产生位移损失,有限元分析结果说明SR 机构的放大倍数小于理论计算值。
猜你喜欢
北华大学学报(自然科学版)(2021年3期)2021-07-13
北京航空航天大学学报(2020年10期)2020-11-14
电脑爱好者(2020年6期)2020-05-26
民用飞机设计与研究(2019年2期)2019-08-05
北京汽车(2019年6期)2019-02-12
雷达学报(2018年5期)2018-12-05
雷达学报(2018年5期)2018-12-05
汽车电器(2018年10期)2018-11-01
宇航计测技术(2018年3期)2018-09-08
北京航空航天大学学报(2017年5期)2017-11-23