飞机机电作动器模糊PI-ANN复合控制仿真
2021-11-08 02:55鹿山山王志胜欧阳权段朝伟丛玉华肖志慧赵祥丹
兵器装备工程学报 2021年10期
鹿山山,王志胜,欧阳权,段朝伟,丛玉华,2,肖志慧,赵祥丹
(1.南京航空航天大学 自动化学院,南京 211106;2.南京理工大学紫金学院 计算机学院,南京 210023)
1 引言
随着功率电传技术和机电技术的发展,越来越多的机载设备采用电能取代传统飞机上的液压能、气压能和机械能,多电/全电飞机开始大量出现[1,2]。飞机的机电作动器类似于人体的肌肉组织,是飞机控制系统的执行机构,通过带动舵面实现飞行姿态控制,常称为“舵机”[3]。与传统的液压作动器相比,机电作动器降低了作动系统的复杂性,增加了安全性与可靠性,减小了维修难度,提高了能量转换效率[4-5]。飞机要求机电作动器的环境适应能力强、性能稳定、快速性好、强抗干扰能力等,电机是机电作动器的核心执行部件[6],其中应用最为广泛的是永磁同步电机(permanent magnet synchronous motor,PMSM),具有高可靠性、大功率密度、小体积、低成本等优点[7]。
电机控制系统是机电作动器的关键组成部分。文献[7]提出了一种适用于永磁同步电机的位置跟踪控制器,由非线性扩张状态观测器、轨迹微分器和动态表面控制组成,通过仿真验证了位置跟踪器,提高了位置跟踪精度、抗干扰能力与抑制混沌性能;文献[8]设计了含有速度调节和电流调节的永磁同步电机双闭环回路,通过仿真和试验表明控制系统有较好的静态、动态性能;文献[9]用模糊PI控制器代替速度环中的传统PI控制器,通过仿真实验证明了电动车的永磁同步电机加速时间缩短、电机输出转矩脉动减小;文献[10]提出了基于气隙磁场定向的永磁同步电机矢量控制策略,通过仿真证明了设计策略能有效降低谐波对磁链的干扰;文献[11]将模糊原理加入到位置环传统PID中,通过仿真证明了其有更好的适应性,但对系统内部的非线性因素和外部干扰没有进行分析和补偿。
传统PI控制容易实现,因而在实际工程中依旧应用广泛[12],然而机电作动器具有非线性、多变量、强耦合的特点,传统PI控制效果达不到性能要求[13]。智能控制中的模糊控制与神经网络控制都有着广泛的应用[14]。针对机电作动器作动精度与抗扰动的问题,基于传统三闭环控制,利用模糊控制调节简单、应用性强的优点[15],将模糊理论加入到位置环,设计模糊PI控制,在不同状态下调节PI参数以提升系统的性能;将自适应神经网络引入到速度环,通过神经网络逼近非线性干扰函数,提高系统的抗干扰能力[16]。
2 飞机机电作动器数学模型
飞机机电作动器可以分成电机部分与机械传动部分,模型如图1所示[5]。
2.1 电机部分
对常用的表贴式三相PMSM数学模型进行研究[17],在d-q坐标系下,建立电机定子磁链方程组为:
(1)
式(1)中:ψd和ψq分别是定子磁链的直轴和交轴分量;Ld和Lq分别是定子电感的直轴和交轴分量,Ld=Lq=L;id和iq分别是电流直轴和交轴分量;ψr是转子磁链。在d-q坐标系下,电机定子电压方程组与电磁转矩为:

(2)
Te=np(ψdiq-ψqid)
(3)
式(2)~(3)中:Ud和Uq分别表示定子电压的直轴和交轴分量;Rs是电机定子电阻;ωr=npωm是电机电气角速度,np是电机极对数,ωm是电机机械角速度;Te为电机的电磁转矩[18]。
2.2 机械传动部分
机械传动部分如图2所示[19]。
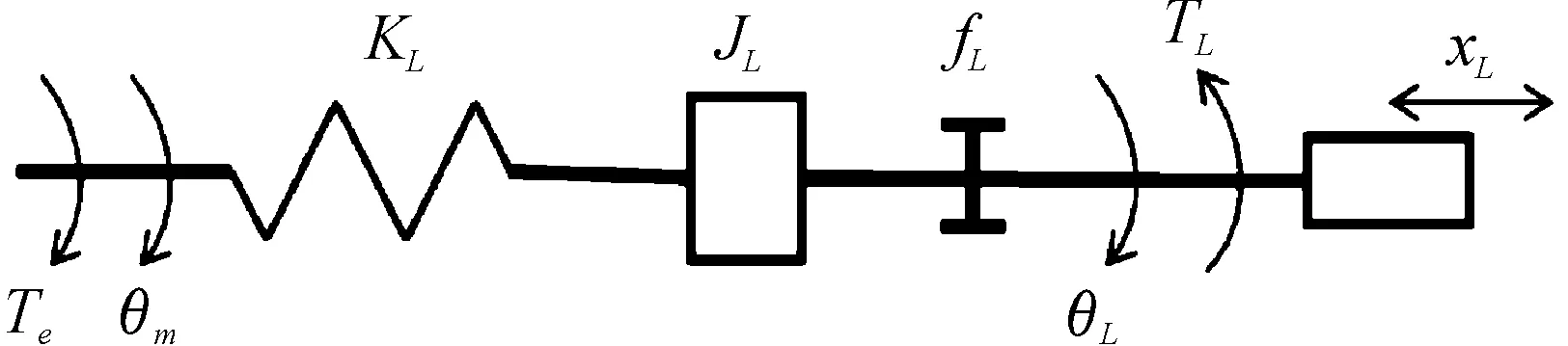
图2 机械传动部分示意图
图2中,Te是电机输出电磁转矩,θm是电机输出角度,KL是作动部分等效扭转刚度,JL是等效转动惯量,fL是阻力等效阻尼系数,θL是丝杠旋转角度,TL是作动点等效负载转矩,xL是作动位移,xL=kθL/2π,k为滚珠螺母系数。建立的运动方程与转矩方程分别为:
(4)
Te(t)=KL[θm(t)-θL(t)]
(5)
对上式进行拉普拉斯变换,可以得到:
(6)
综合式(1)~式(4),选择xL、θL、ωm、iq和id作为状态变量,机电作动器的状态空间模型可以写成:
(7)
式(7)中:A、B、C、E为系数矩阵;x是状态变量;u是控制输入;v为干扰量;y表示系统输出。具体表达如下:
3 模糊PI-ANN控制
机电作动器是高阶非线性强耦合系统,在位置环中基于传统PI控制引入模糊理论,提高控制系统的环境适应能力,但不能抑制干扰力矩;由状态空间模型可知,干扰力矩对角速度存在直接影响,所以设计时在速度环中引入神经网络控制以补偿干扰力矩的影响。
3.1 模糊PI控制设计
PID控制中微分的引入会放大噪声导致系统性能下降,所以本文只引入了PI控制,PI的控制律可以写为:

(8)
传统PI控制的参数不能根据工作状态做出实时调整,因此位置环中在传统PI控制上加入模糊控制,提高系统的精确度和快速性等[20]。单变量二维模糊PI控制器示意图如图3。

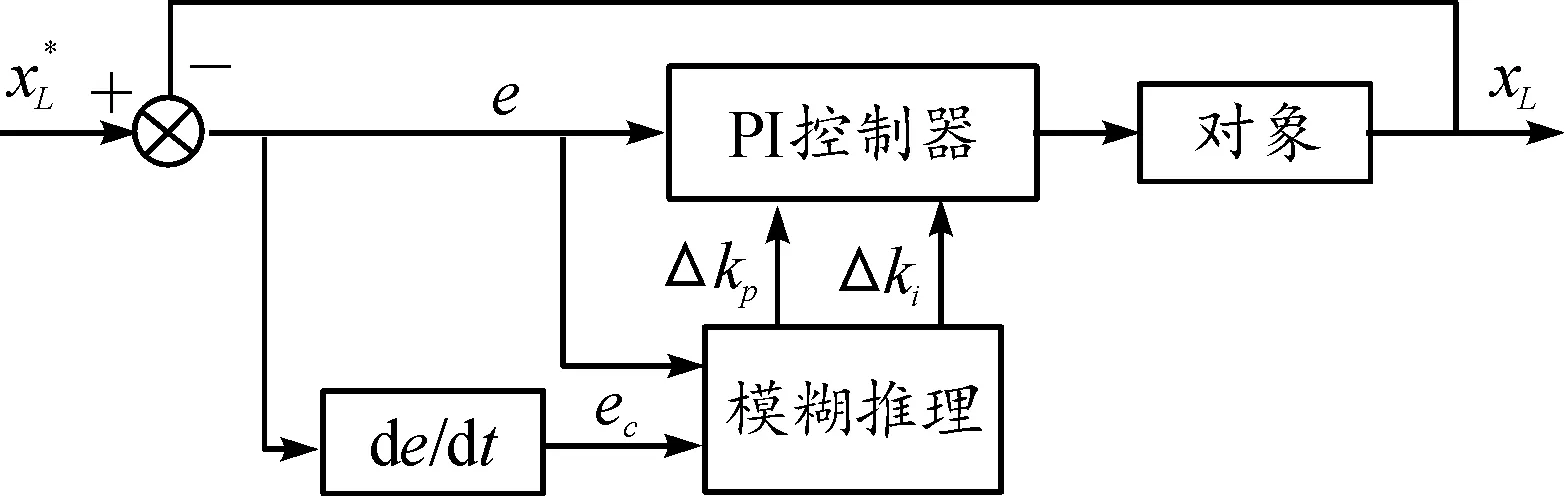
图3 位置环模糊PI控制器示意图
(9)
式(9)中:kp和ki是模糊PI控制器调节后参数,kp0和ki0是PI控制器初始参数。
模糊推理的输入量是误差e和误差变化量ec,分别定义在模糊论域E,EC上,输出量是Δkp和Δki,分别定义在模糊论域KP,KI上,e、ec、Δkp和Δki的模糊集均为{负大(NB),负小(NS),零(ZO),正小(PS),正大(PB)},均服从三角隶属度函数,模糊推理选用max-min方法和面积重心法去模糊化。
根据e和ec的变化,kp和ki整定原则如下:
1)当|e|较大时,Δkp取正大,Δki取负大,使系统有较好的跟踪性能;
2)当|e|较小时,Δkp取正小,Δki取负小,避免系统出现较大的超调;
3)当|e|非常小、|ec|较大时,说明系统还没有稳定,Δkp取正小,Δki取正大,使系统快速达到稳态;
4)当|e|非常小、|ec|较小时,说明系统即将达到稳态,Δkp取零,Δki取正小;
5)当|e|、|ec|都非常小时,说明系统达到稳态,Δkp和Δki都取零,控制器参数保持不变。
根据以上的整定规则,得到Δkp和Δki的模糊规则如表1所示。
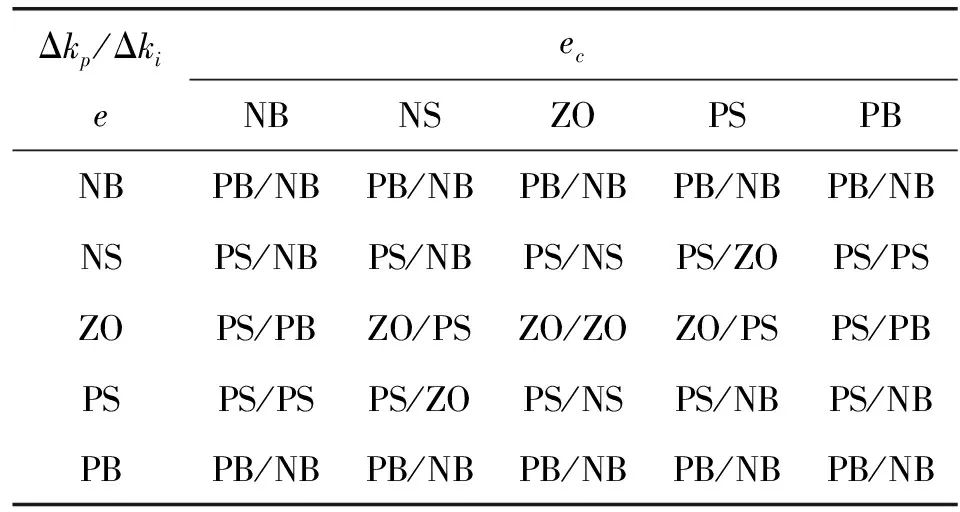
表1 Δkp和Δki模糊规则表
由式(6)可知,电机输出角度信号超前于作动点位移信号,为改善动态加速过程,在位置环的反馈中,用电机输出角度与作动点位移共同反馈,位置环反馈表达式为:

(10)
3.2 自适应神经网络设计
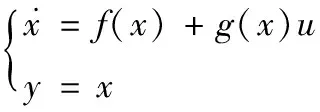
(11)
式(11)中:x=ωm是状态变量,f(x)是未知非线性函数;g(x)是已知函数;u∈R和y∈R分别为速度环子系统的控制输入和输出。定义速度误差信号为:
(12)
(13)
将式(13)代入式(11),可得到误差系统为:
对上式拉式变换变成(s+Kp)E(s)=0,对应的根是s=-Kp,只要系数Kp大于0就能保证速度环子系统的稳定性。但是控制律中存在不确定非线性函数f(x),无法直接实现控制。
神经网络优越的逼近能力已经在许多文献中得到证明[21-22],设计RBF神经网络逼近未知函数f(x)。自适应神经网络框图如图4。
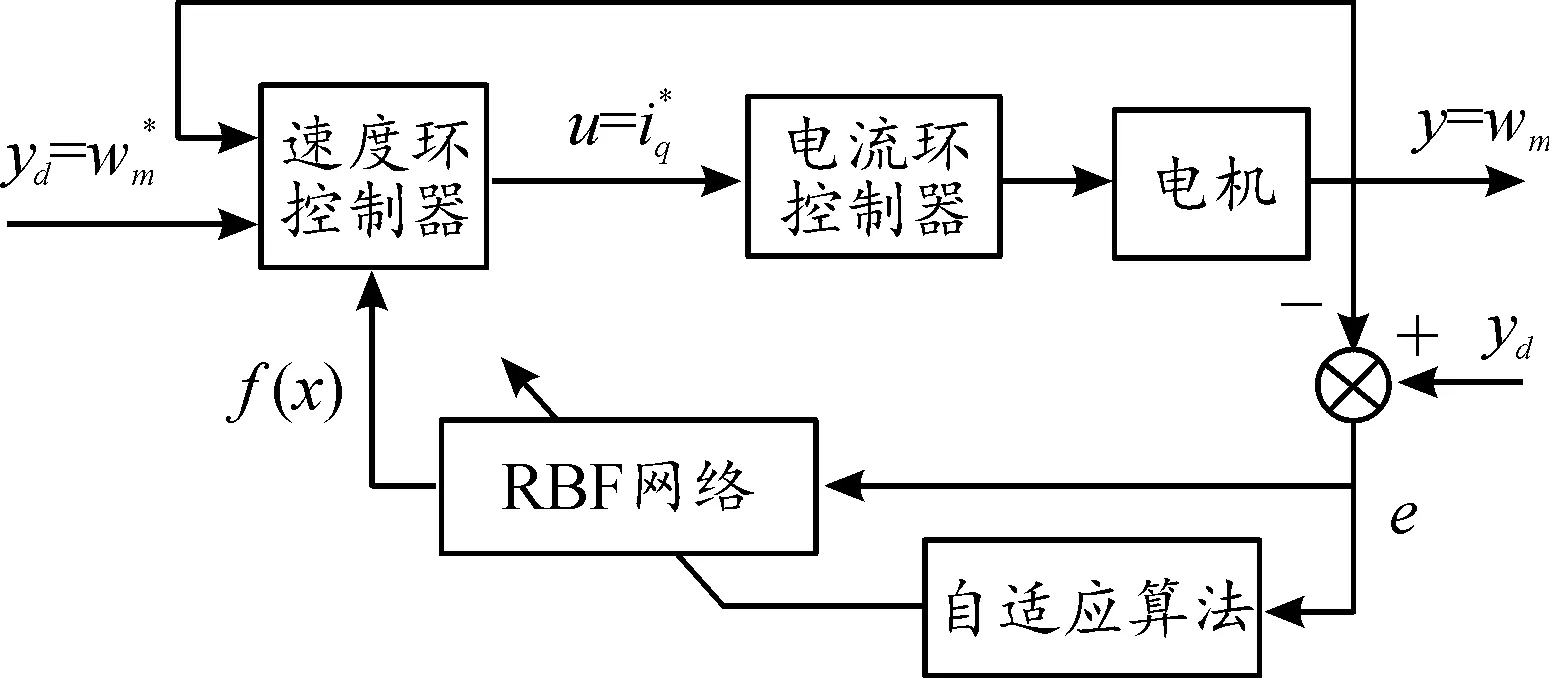
图4 速度环自适应神经网络框图

(14)

(15)
利用Lyapunov方法求出RBF神经网络权重调节的自适应律为[23]:
(16)
式(16)中:γ和p是2个可调正常数;e为速度误差信号;b在系统里是常数1。
通过构建合适的Lyapunov函数,可以证明本文设计的自适应神经网络是稳定的[23]。设计合适的Kp、p满足-eTKppe≤0和选取逼近误差非常小的神经网络,根据LaSalle不变性原理,则速度环闭环系统是渐进稳定的,且系统的收敛速度取决于Kp和p的值。
4 仿真结果
4.1 模糊PI控制仿真
在Matlab/Simulink构建机电作动器仿真模型,如图5所示,表2是机电作动器的物理参数。
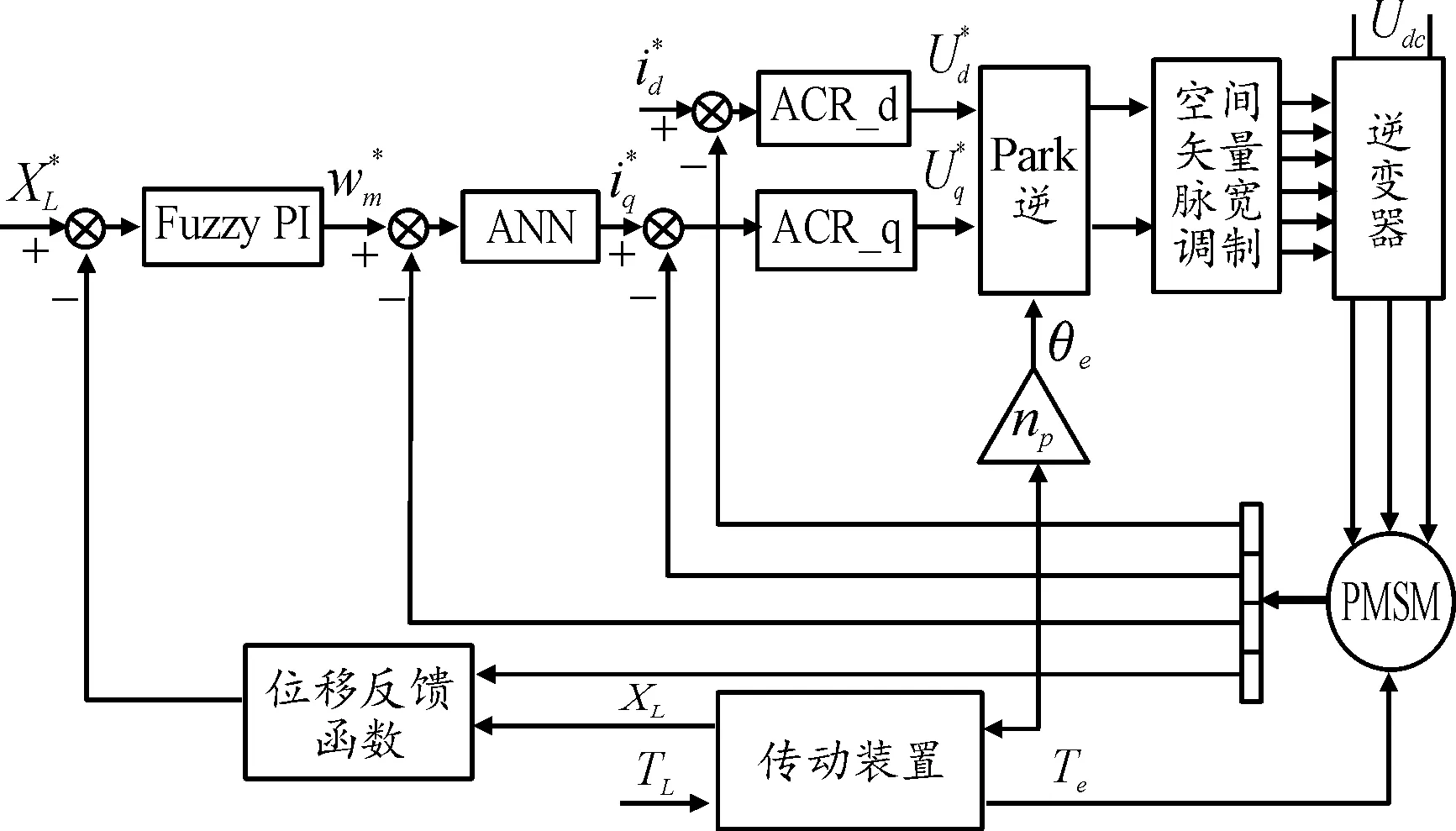
图5 机电作动器仿真模型示意图
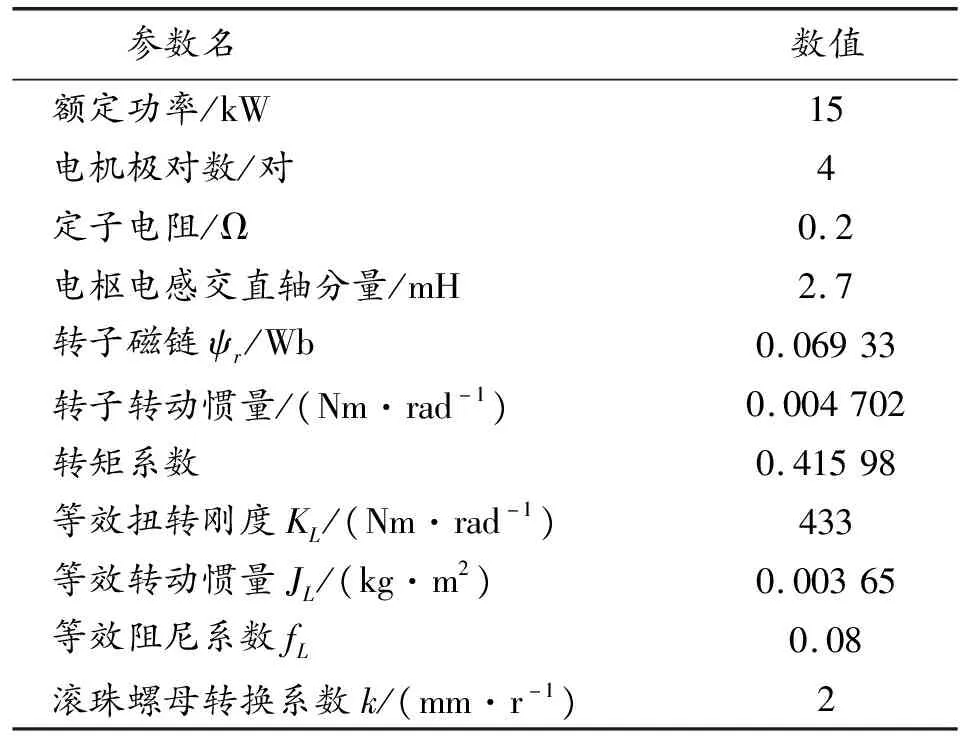
表2 机电作动器参数
机电作动器传统三闭环PI控制器的控制参数为位置环(P=60,I=6)、速度环(P=6.5,I=2)、电流环(P=10,I=3)。
模糊PI控制器中,e、ec、Δkp和Δki的模糊论域定义在E=[-1.5,1.5]、EC=[-20,20]、KP=[-40,40]、KI=[-6,6],由Δkp和Δki的模糊规则表,可以得到Δkp和Δki的输出曲面如图6所示。
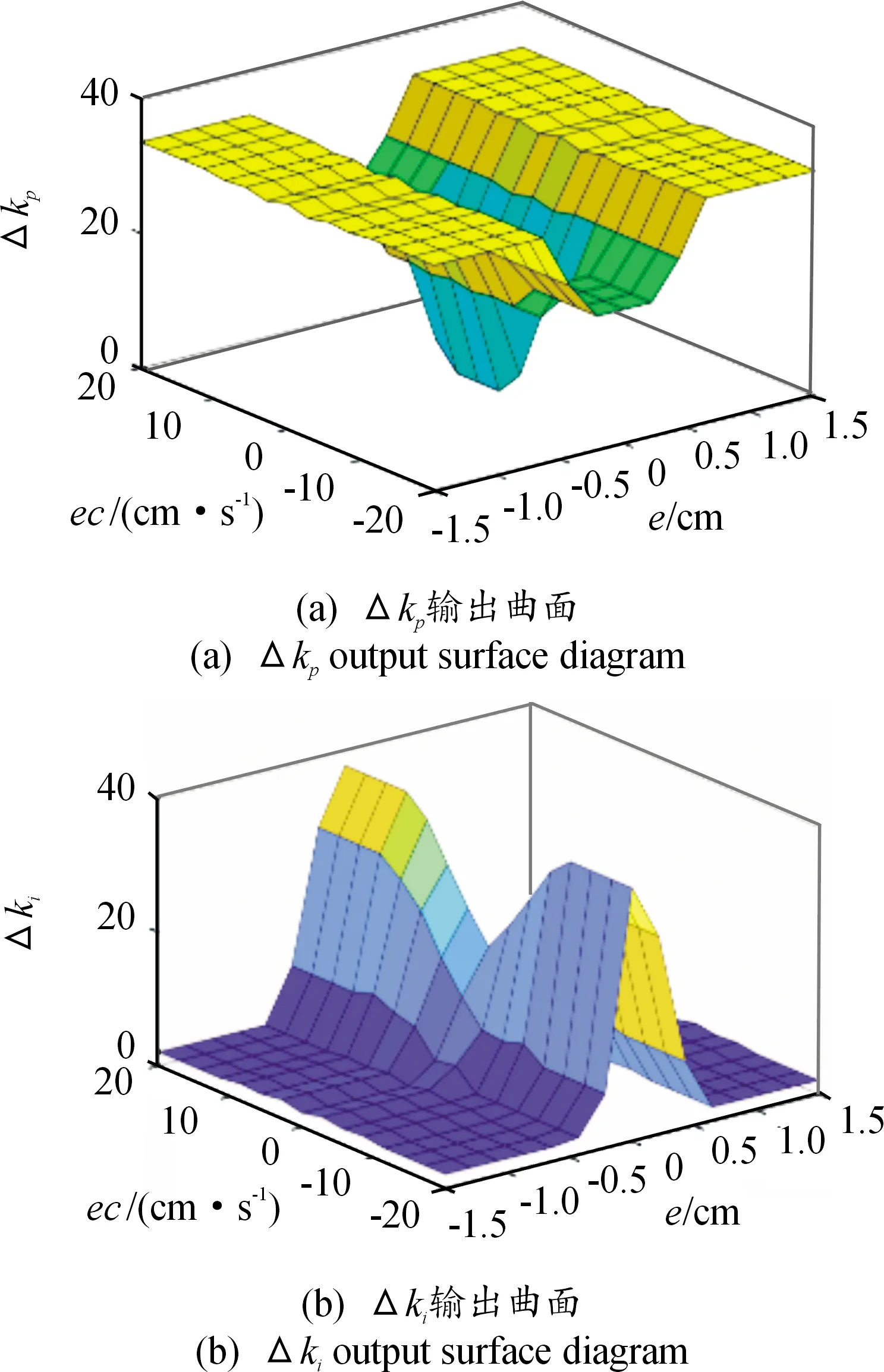
图6 Δkp和Δki输出曲面
将位置环替换为模糊PI控制器(初始参数为传统PI参数),其他PI参数相同,α=0.75,β=0.25,Δ=0.01,空载运行,仿真时间设置成2.5 s,在1~1.5 s时加入10 N·m的干扰力矩。作动系统的输出位移如图7所示。
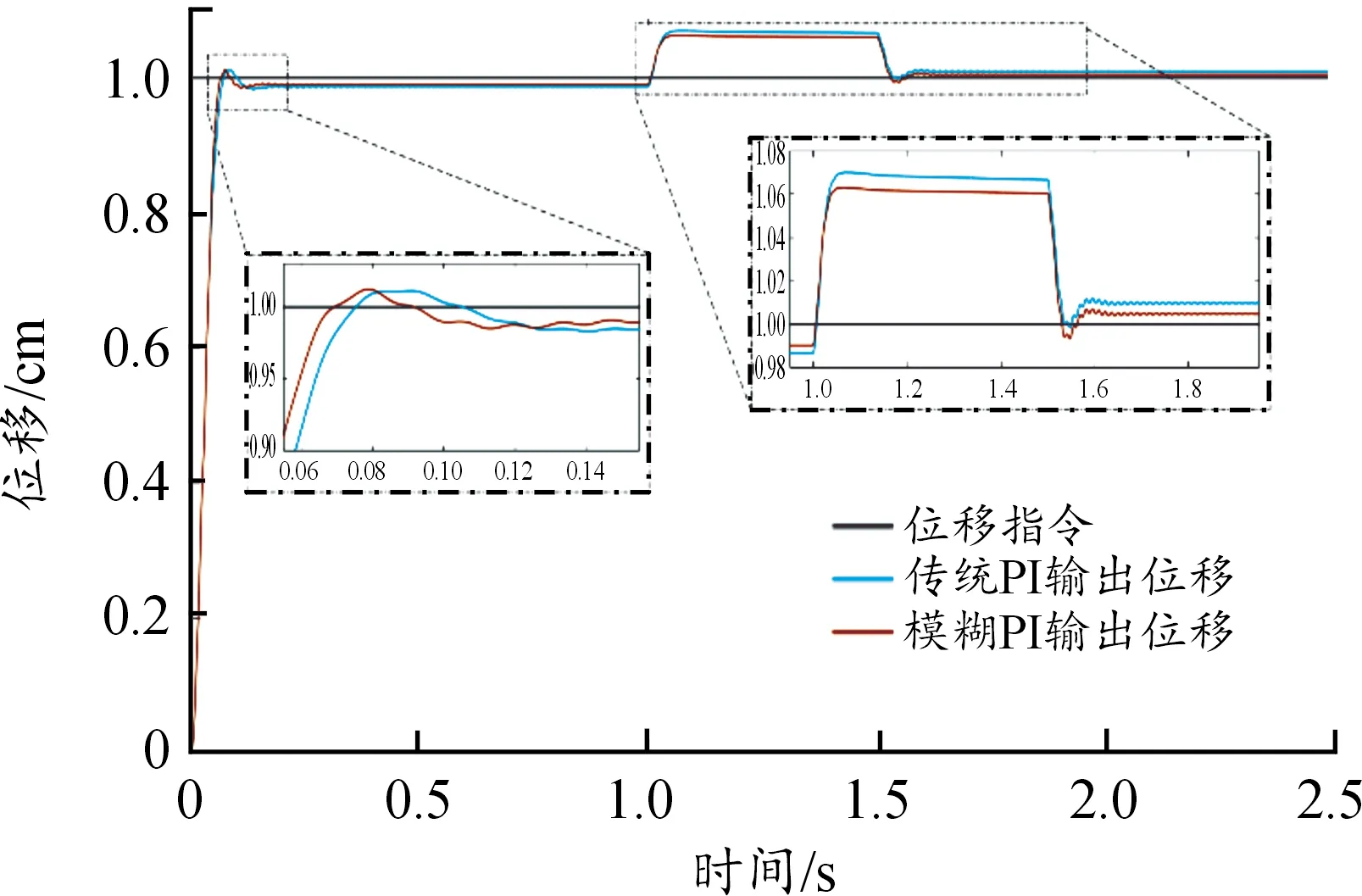
图7 模糊PI控制仿真的输出位移曲线
实验仿真的部分数据如表3所示。变化量等于传统PI与模糊PI的差值占传统PI值的百分比。
从图7与表3可以看出,模糊PI控制相比传统PI控制,上升时间减少8.33%,反应速度更快;稳态误差减小26.87%;加入干扰后,位移偏差减小10%,抗干扰能力变强。
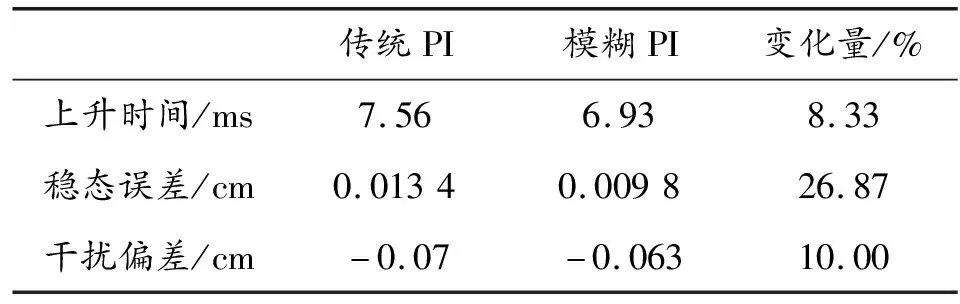
表3 模糊PI仿真结果参数
图8是仿真过程中模糊推理的输出量Δkp和Δki。
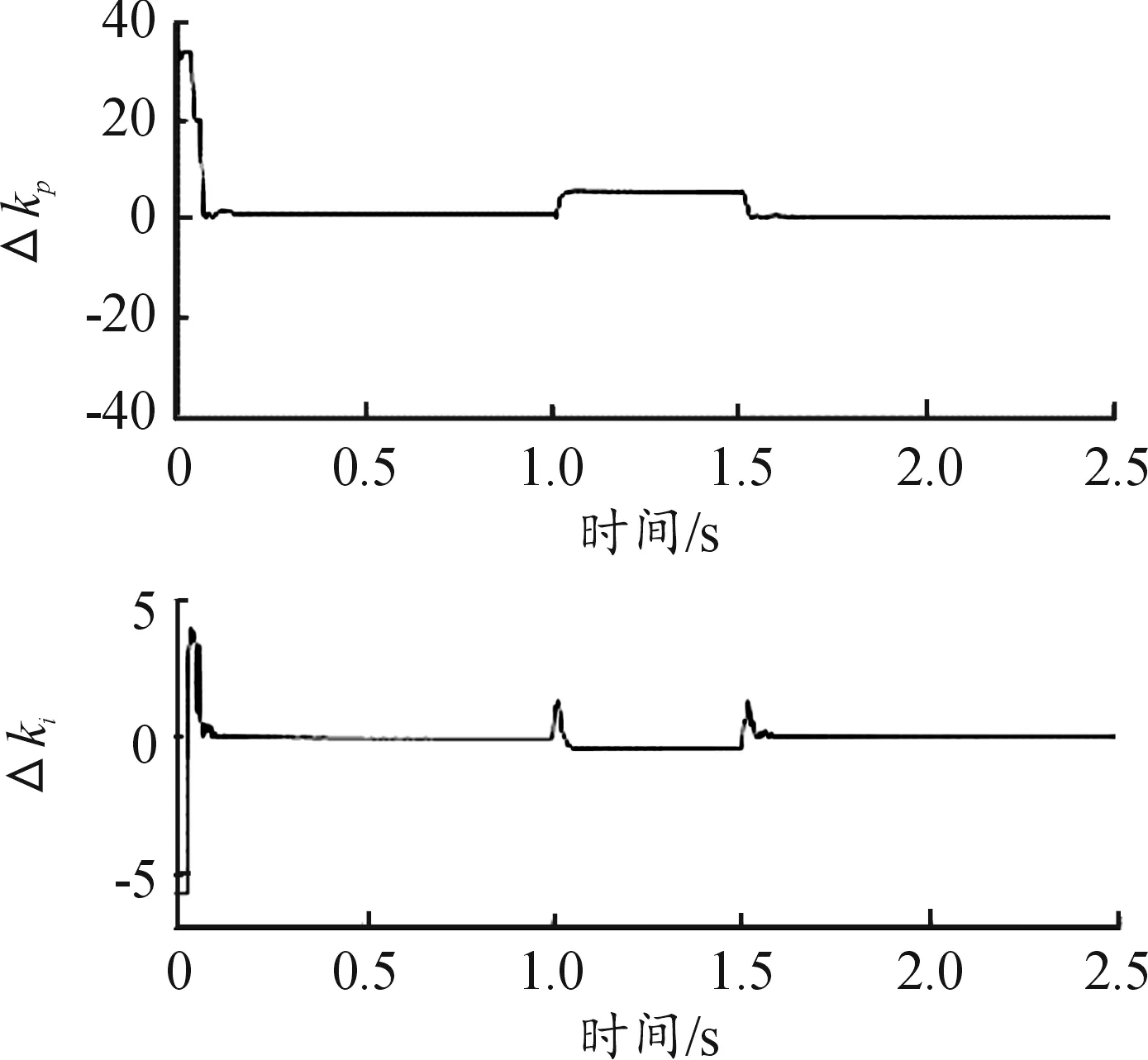
图8 模糊推理输出量Δkp和Δki
4.2 模糊PI-ANN控制仿真
将速度环的传统PI控制换成所设计的RBF神经网络,其中γ=5 000、p=21.9、Kp=1 140,其他仿真条件不变。作动系统输出位移如图9所示。
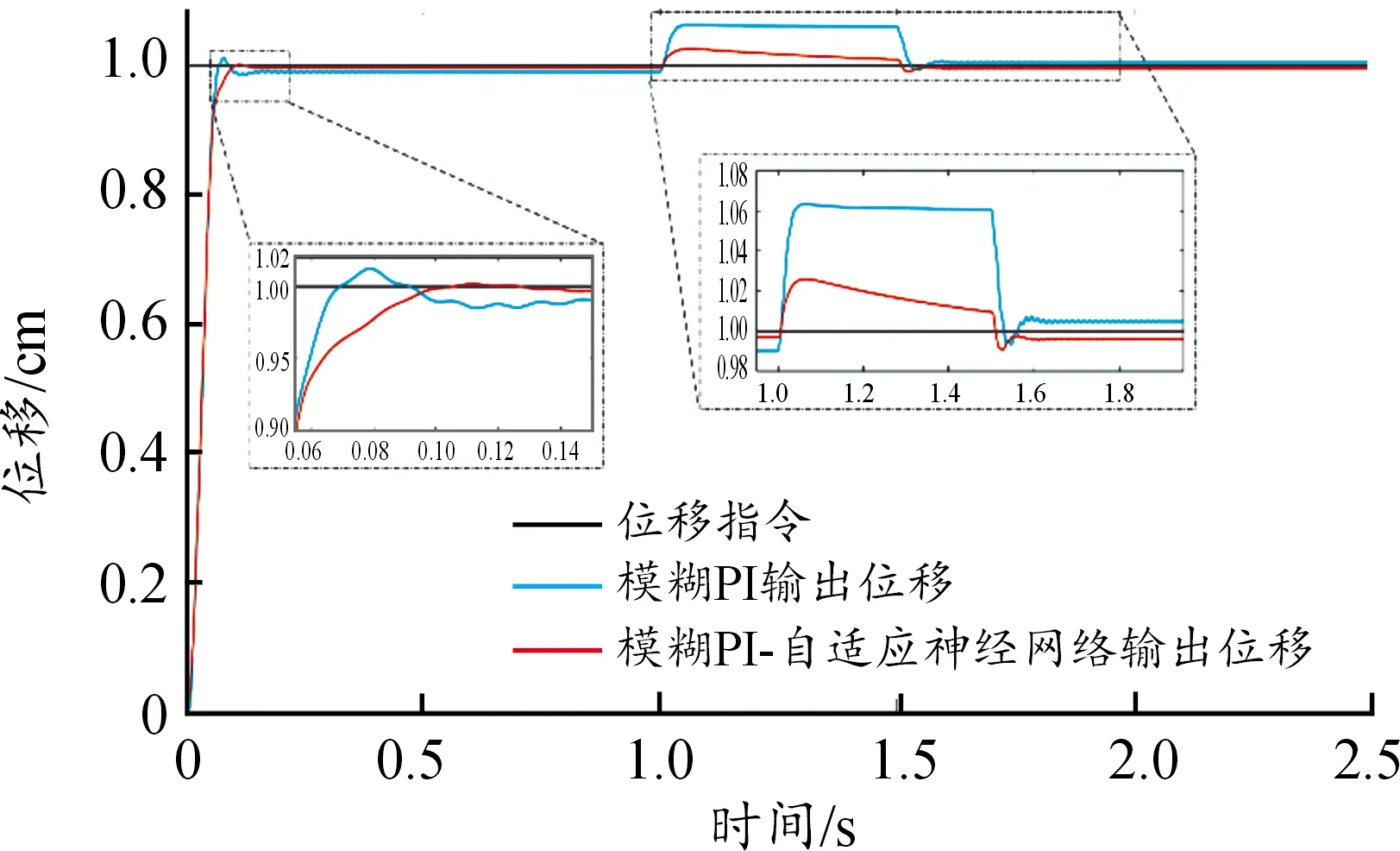
图9 模糊PI-ANN控制仿真的输出位移曲线
模糊PI-ANN控制系统仿真部分数据如表4所示。变化量等于传统PI与模糊PI-ANN的差值占传统PI值的百分比。
从图8与表4可以看出,在已有模糊PI控制的作动系统中,在速度环中所设计的自适应神经网络几乎无超调,平滑进入稳态,稳态误差减小76.87%,但是上升时间增加了39.68%;加入干扰时,位移偏差减小62.86%,明显提升了抗干扰能力且恢复稳态的时间更短。
图10表示了RBF神经网络仿真过程中的高斯隶属函数和自适应权值的估计值。
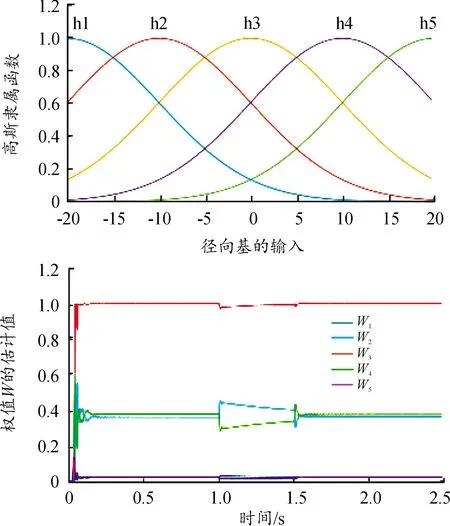
图10 高斯隶属函数与自适应权值的估计值曲线
5 结论
本文将智能控制中的模糊逻辑与RBF神经网络应用到机电作动器控制中,提出了模糊PI-ANN控制策略。根据PMSM传统三闭环控制系统,利用Matlab仿真软件构建基于传统PI、模糊PI和模糊PI-ANN控制策略的仿真模型。仿真结果表明,与传统PI控制和模糊PI控制相比,本文提出的模糊PI-ANN控制方法明显提高了机电作动器的位置跟踪性能,响应几乎无超调,稳态误差更小,稳态误差减小76.87%,抗干扰能力更强,位移偏差减小62.86%,恢复稳态的时间更短。下一步工作将是搭建实物模型,实现控制方法并进行实验,以使控制方法更加完善。
猜你喜欢
大电机技术(2022年4期)2022-08-30
大电机技术(2022年3期)2022-08-06
商品与质量(2021年43期)2022-01-18
能源工程(2021年6期)2022-01-06
建材发展导向(2021年7期)2021-07-16
汽车实用技术(2021年3期)2021-02-24
进出口经理人(2021年8期)2021-02-12
科技创新与应用(2017年12期)2017-05-08
科教导刊·电子版(2016年3期)2016-03-14
科技创新导报(2014年36期)2015-03-11