
电动车用永磁同步电机变频控制系统研究
2021-11-07 16:15李坤
安徽电子信息职业技术学院学报 2021年5期
李 坤
(江苏联合职业技术学院无锡机电分院 自动化工程系,江苏 无锡 214028)
1 引言
面对环境污染、能源紧缺等现象,发展以电动车用作为主力军的新能源汽车成为必然的选择趋势[1]。电机及其控制系统作为电动车用的关键,直接关乎到它的整体系统性能。永磁同步电机(PMSM)因其高效率、高功率密度等优点,而受到普遍重视,被广泛应用于电动车上。
目前,对PMSM及其控制系统的研究日趋成熟。文献[2]提出了以80C196MC单片机为核心处理器的永磁同步电动机控制系统,采用U/F控制方法原理。文献[3]设计了PI控制器,将该控制器用于永磁同步电机变频调速系统。文献[4]介绍了一种利用永磁同步电机直接驱动的大型风扇,采用变频控制技术进行调速。
本文针对电动车用领域,提出永磁同步电机变频控制系统。利用永磁同步电机的优点,分析其数学模型,然后对电动车用永磁同步电机变频控制系统分别进行硬件设计和软件设计。最后,通过实验验证所提系统的可行性和可靠性。
2 永磁同步电机数学模型
为简化分析,通常假设三相绕组对称分布,永磁材料的电阻率无穷大,忽略PMSM的磁饱和效应、涡流和磁滞损耗[5],其简化数学模型一般包括三种。图1所示为永磁同步电机空间矢量图。
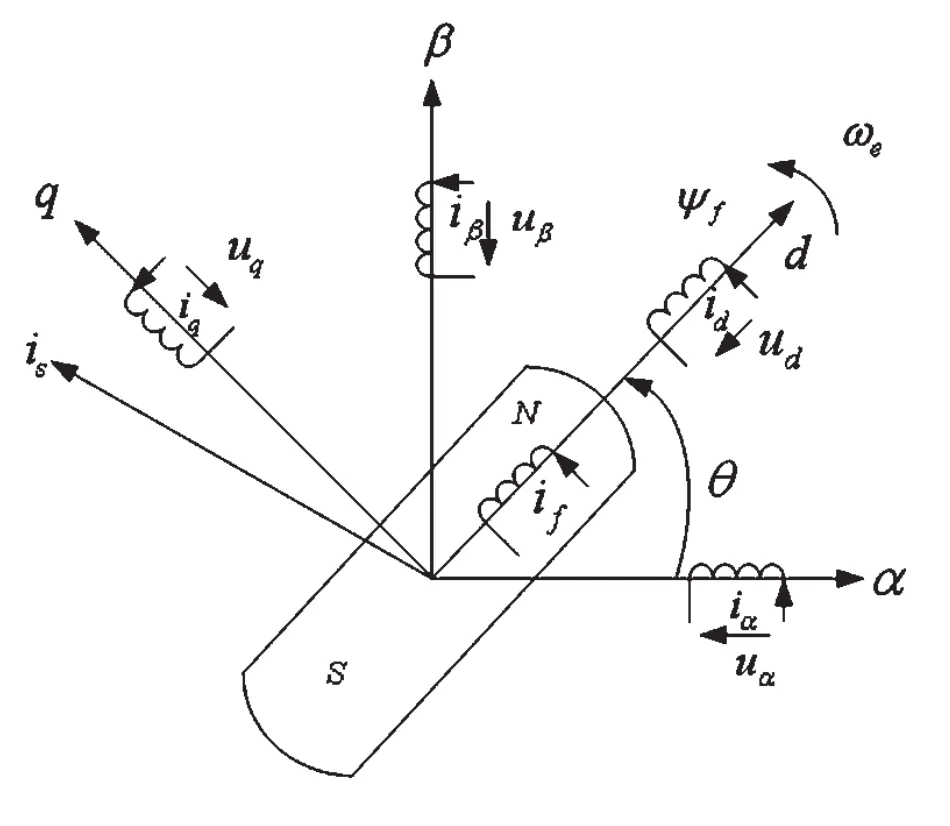
图1 永磁同步电机空间矢量图
αβ坐标系下的PMSM数学模型表示如下。定子磁链方程:

式中,ψα、ψβ为定子磁链α轴和β轴分量,LS为电机电感。
定子电压方程:

式中,iα、iβ为定子电流 α 轴和 β 轴分量,uα、uβ为定子电压α轴和β轴分量。
状态方程:

dq坐标系下的PMSM数学模型表示如下。
定子磁链方程:

式中,Ld和Lq分别为定子d、q轴电感。
定子电压方程:

式中,Rs为定子电阻,ud和uq为定子电压d轴和q轴分量,ψq和ψd为定子磁链q轴和d轴分量。
电磁转矩方程:

式中,Te为电磁转矩,Pn为电机极对数。
运动方程:

式中,TL为负载转矩,B为粘滞摩擦系数,J为转动惯量,ωr为转子机械角速度。
3 变频控制系统硬件设计
基于DSP TMS320LF2407的永磁同步电机变频控制系统的硬件框图如图2所示。

图2 永磁同步电机变频控制系统硬件框图
由图可以看出,整个变频控制系统主要由控制电路和主电路构成。电动车用供电为直流电,因此,首先输入的为直流电源,然后采取滤波环节,接着到达预充电模块,给母线电容进行预充电,从而减小上电过程对其所造成的较大冲击电流。控制模块以DSP为核心,通过母线电压传感器来检测电容充电是否完成,若检测到其已完成,则控制继电器吸合,从而预充电电阻旁路。
上述介绍的主要是整个变频控制系统的前端电路,其后端电路主要包括了IPM模块、交流滤波模块、相电流检测模块。IPM模块主要是为了实现在PWM信号的控制下对直流输入电压的逆变,从而得到三相交流电。因为输出的三相交流电所呈现的不是良好的正弦波,存在着各次谐波、尖峰等,所以为了最大程度的得到高质量波形,需要经过交流滤波模块来进行滤波。由PMSM数学模型可发现,定子相电流检测的是否准确直接关乎到整个变频控制系统的精确性,因此,相电流检测模块的作用是将相电流转化为与其相对应的二进制代码,从而有利于控制过程中的处理。
4 变频控制系统软件设计
永磁同步电机变频控制系统采用DSP作为主控制芯片,控制程序由主程序和中断子程序构成。如图3所示,为永磁同步电机变频控制系统主程序流程图。首先进行的是系统初始化和时钟初始化操作,成功后进入下一步,若失败则报错并退出系统。接着通过看门狗指令监视程序的运行状态,系统的采样时钟频率设置为150MHz,从而使整体系统的可靠性获得了有效得提升。然后开始系统循环等待,直至功能键按下进入控制中断服务程序,或按下退出中断程序,结束运行并退出系统。
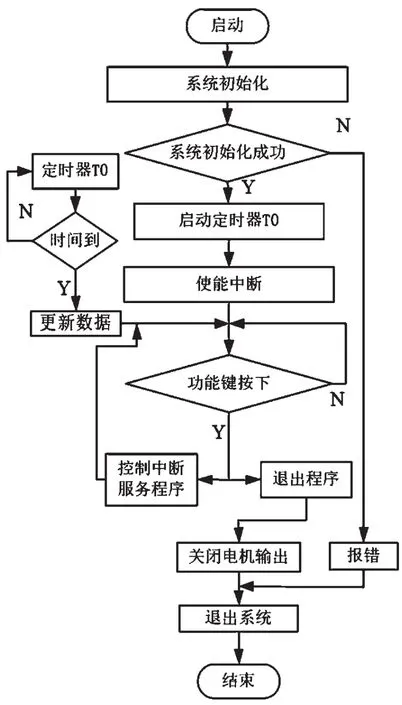
图3 永磁同步电机变频控制系统主程序流程图
DSP主程序能够被中断指令进行中断,等到它执行完成后自动地回到断点处继续执行主程序。
中断子程序的作用是根据控制算法进行PMSM变频控制,是整个控制程序的核心部分。内部功能包含采样相电流信号、计算电机位置以及转速、实现控制算法等,其流程图如图4所示。

图4 永磁同步电机控制系统子程序流程图
5 结果与分析
变频控制系统设计完成后,在PMSM调速平台上进行了实验研究,以验证其是否满足性能和使用要求。所用PMSM主要参数如下:直流母线电压352 V,额定功率15kW,额定转速3000r/min。图5、图6所示为电机相电流的波形,给定转速分别为1500rpm、2000rpm。由图可见,波形呈现出稳定的正弦波,说明该系统的正确可靠性。

图5 转速为1500rpm时的相电流波形

图6 转速为2000rpm时的相电流波形
6 总结
本文针对电动车用领域,提出永磁同步电机变频控制系统。利用永磁同步电机的优点,结合了它的数学模型,对电动车用永磁同步电机变频控制系统分别进行了硬件设计和软件设计。最后,对所提系统进行了实验研究,实验结果验证了其可行性和可靠性。
猜你喜欢
电工技术学报(2022年20期)2022-10-29
时代汽车(2022年19期)2022-10-18
防爆电机(2022年4期)2022-08-17
防爆电机(2022年4期)2022-08-17
防爆电机(2022年4期)2022-08-17
防爆电机(2022年4期)2022-08-17
重庆理工大学学报(自然科学)(2022年5期)2022-06-18
防爆电机(2022年3期)2022-06-17
飞控与探测(2022年2期)2022-06-11
水下无人系统学报(2021年6期)2022-01-15
