“韦氏摆”振动规律研究
2021-11-06 03:45姜付锦
大学物理 2021年11期
姜付锦,韩 灿
(1.黄陂区第一中学,湖北 武汉 430300;2. 黄陂区第三中学,湖北 武汉 430300)
1 题目(威尔伯福斯摆/韦氏摆)
如图1所示,韦氏摆由悬挂在竖直方向的螺旋弹簧和连接在弹簧末端的物块组成,物块既能沿弹簧上下振动,又能绕其竖直轴旋转. 请探究这种摆的运动行为,以及它是如何依赖于相关参数的.

图1 韦氏摆
通过实验,可观察到振子时而上下振动,时而绕竖直轴左右振动,当上下振动幅度最大时,左右振动的幅度最小;当左右振动幅度最大时,上下振动的幅度最小,周而复始.
2 建立模型


图2 弹簧的模型

图3 弹簧丝与水平的夹角

图4 弹簧丝的受力分析图
根据参考文献[1]中的思想,可以把韦氏摆等效成弹簧振子与扭摆的耦合,弹簧丝的切线与水平面不平行[2]. 设弹簧的扭转系数为k2,弹簧的折弯系数为k1,弹簧振子的质量为m,弹簧的质量不考虑,系统绕扭转轴的转动惯量为I.当振子上下运动时,弹簧的轴线长度是变化的,但是考虑弹簧上下运动的距离远小于弹簧开始时轴线长度,所以可以认为弹簧丝切线与水平面的夹角不变,弹簧产生的扭矩M=k2θ(t),弹簧的折弯力F=k1x(t),弹簧上下振动的位移为x(t),左右转动的角度为θ(t),则系统动力学微分方程组为
(1)
(2)
2.1 归一化研究耦合因子的作用
把式(1)、式(2)整理后得
(3)
(4)

(5)
系统的初始状态为
x(0)=0,x′(0)=v0,θ(0)=0,θ′(0)=0
(6)
联立式(3)、式(4)、式(6)求得:
(7)
(8)

(9)
2.2 耦合因子不同时振动规律

(10)
则有

(11)
(12)
式(11)、式(12)的解为

(13)
(14)

2.3 系统简正频率的研究[5]
为了进一步研究系统简正频率与系统物理量之间的关系,可以把式(3)、式(4)中相关系数作如下变换:
(15)
(16)
在式(15)、式(16)中令

(17)
式(15)、式(16)是二阶常系数齐次线性微分方程组,具有以下形式:
x=A1ept,θ=A2ept
(18)
联立式(15)、式(16)、式(18),为了让式(15)、式(16)有解,则以下行列式应为零
(19)
式(19)的解为
(20)
因为系统振动的简正频率为正值,所以取式(20)中两个正值即可. 还可以发现,系统振动的两个简正频率与系统的相关参数紧密相关,这与参考文献[3]、[6]中的解析解是吻合的.
3 数值模拟
为了研究问题的方便,根据式(11)、式(12)归一化其他物理量后,得到图5—图8.

图5 c1=c2=0.4

图6 c1=c2=0.1

图7 c1=c2=0.03
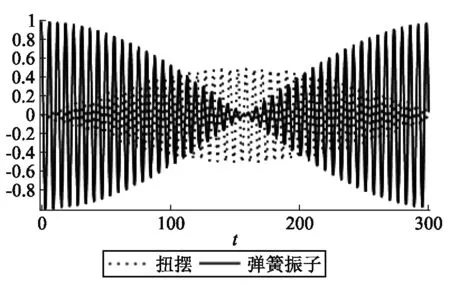
图8 c1=0.04,c2=0.01

4 实验验证
图9所示为实验装置,振子内置一个6轴陀螺仪芯片且带无线传输功能,振子两边各有一个调节螺杆,调节它可以改变振子的转动惯量,内置芯片可以测量振子在x、y、z3个方向的加速度和角速度. 现测量弹簧的劲度系数为5.158 N/m,振子的质量为57.3 g,弹簧的匝数为41,弹簧的半径为1.65 cm,弹簧的总长度为2.962 5 m,弹簧丝切线与水平面夹角的正弦值为tanα=0.059. 由于弹簧振子的内部结构不规则,其转动惯量很难测量,弹簧丝的折弯系数和扭转系数也无法测量,所以以下实验只是一种验证性实验:让弹簧振子在竖直方向上小幅度振动,把弹簧振子的实验数据与上面的数值模拟进行比对,研究其是否能达到系统内共振.在实验过程中弹簧振子内置芯片会把测量数据无线传输到电脑中,电脑利用软件处理数据作图,如图10、图11、图12、图13所示.
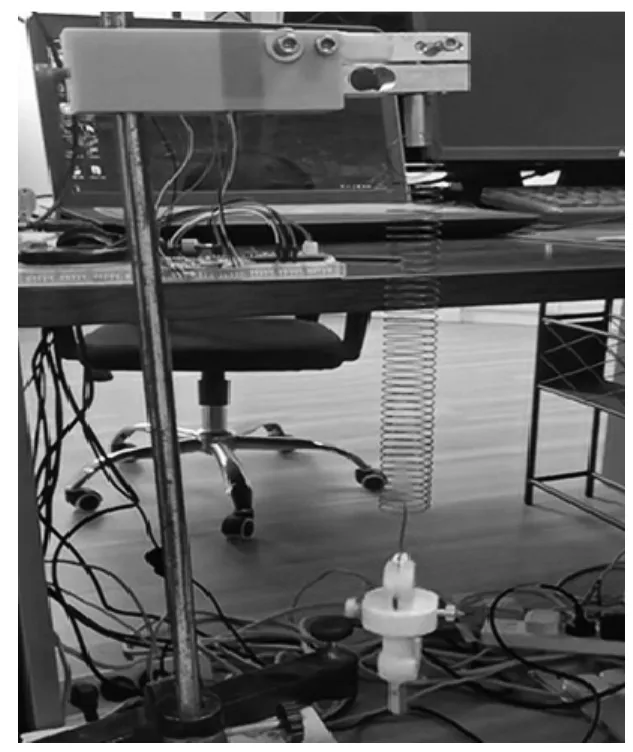
图9 实验装置图

图10 没有达到共振时角速度、加速度与时间关系

图11 接近共振时角速度、加速度与时间关系

图12 共振时角速度、加速度与时间关系

图13 接近共振时两个方向应力与时间关系
如图10所示,振子的角速度是周期性变化的,当振子的角速度为最大时,振子上下振动的加速度最小但是没有达到零,这是因为弹簧振子与扭摆的两个耦合因子并没有调到完全相等所导致的;若缓慢调节振子两边的螺杆改变其转动惯量,可以发现系统会逐渐达到共振,这与参考文献[1]中实验现象是吻合的.
当系统达到共振时,拍的周期约27.647 s,包络面内大约有40个波形,如图11、图12所示,利用拍的相关知识可以计算得两个分振动的圆频率分别为ω1=8.977 rad/s,ω2=9.204 rad/s,折弯劲度系数和扭转劲度系数大约分别为k1=4.44 N/m,k2=5.05×10-4N·m/rad,数值模拟如图14所示. 图13是通过两个应力传感器测量弹簧在两个方向上应力与时间的关系,可以发现当竖直加速度最大时,竖直方向应力也是最大的,当水平方向角速度最大时,水平方向上的应力也是最大的,应力与时间关系之所以不是连续变化的,是因为芯片在无线传输数据时有少量数据丢失以及网络不稳定.
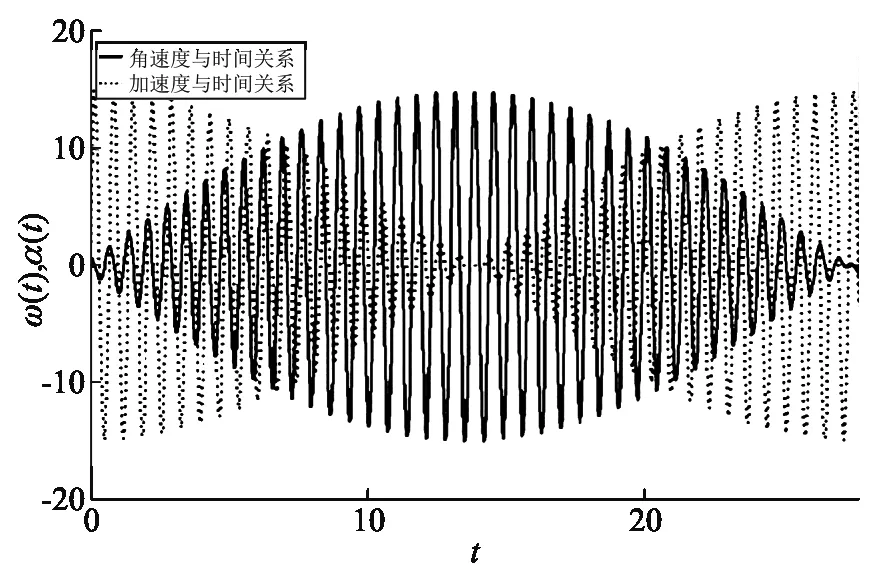
图14 数值模拟角速度、加速度与时间关系
5 结语
致谢:本文中的测量电路设计和数据处理是由笔者的一位朋友——孙月明老师完成,他是一位精通电子电路和单片机设计的老师;在数学建模分析时得到了笔者的一位学生——电子工程师李文成的精心指点,在此特别感谢李文成工程师和孙月明老师对这个问题的分析与解决所付出的不懈努力!
猜你喜欢
数学物理学报(2018年1期)2018-03-26
环球时报(2017-12-14)2017-12-14
传奇故事(破茧成蝶)(2017年5期)2017-11-15
恋恋中国风(2017年5期)2017-09-11
中学生数理化·高一版(2017年3期)2017-07-08
传奇故事(上旬)(2017年5期)2017-05-16
电测与仪表(2016年18期)2016-04-11
火控雷达技术(2016年1期)2016-02-06
中国铁道科学(2015年4期)2015-06-21
物理实验(2015年10期)2015-02-28