基于HyperWorks的混合动力环卫车副车架有限元分析及轻量化设计
2021-11-06 12:02秦东晨林育恒王婷婷陈江义
重庆理工大学学报(自然科学) 2021年10期
秦东晨,林育恒,王婷婷,陈江义
(郑州大学 机械与动力工程学院,郑州 450001)
随着我国经济的快速发展,当前我国的城市化进程不断加快,城市人口日益增多,生活垃圾成为重要问题。而在城市环境中,环卫机械是重要的内容。
与传统燃油车不同,混合动力环卫车部分采用电力作为动力来驱动汽车运转。受动力电池质量、动力电池续航里程的限制,在节能限耗法规下,车辆轻量化成为首要考虑问题。汽车轻量化技术是汽车节油的重要手段,试验表明:汽车质量每下降10%,油耗约下降6%~8%[1]。为降低混合动力环卫车副车架质量和整车油耗,达到车辆节能减排的目的,需要对混合动力环卫车副车架进行轻量化设计。彭育辉等[2]采用组合优化聚类与马尔科夫链对环卫车辆的行驶状况进行了构建。韩超等[3]进行了混合动力清扫车电机控制系统开发的研究。张先令等[4]进行了小型轮毂式环卫电动车电控系统的设计与实现的研究。但是通过研究发现:国内对混合动力环卫车副车架有限元分析及轻量化设计的研究较少。
针对混合动力环卫车副车架有限元分析及轻量化设计研究较少的情况,以副车架作为研究对象,利用三维建模软件CATIA绘制出副车架的三维图,将三维模型导入有限元仿真软件HyperWorks中进行几何清理和网格划分,建立有限元模型并进行分析;根据有限元分析结果和轻量化要求,提出改进设计方案,对改进后的副车架进行相同工况下有限元分析,最终验证轻量化设计方案的合理性。
1 副车架有限元分析模型
1.1 有限元模型的建立
根据副车架的二维CAD图纸,通过三维建模软件CATIA对副车架进行三维建模。在对混合动力环卫车副车架三维模型进行构建的过程中,不仅要考虑模型与实际的紧密结合,还要考虑模型计算的可行性,所以在三维建模过程中,对所构建的副车架的三维模型进行部分简化:首先,忽略模型中的非承载件,对不需特别关注的细节(如横梁倒角、细小螺栓孔) 予以省略;其次,认为结构中的焊接是理想焊接,即焊接区域材料与其他区域相同,将焊接件构造成一个整体件;材料参数按照理想弹塑性进行设置[5]。构建的副车架的三维模型如图1所示。

图1 副车架三维模型示意图
车架材料为 Q345b 型钢,弹性模量为210 000 MPa,泊松比为0.3,密度为7 850 kg/m3,屈服强度极限为 345 MPa。
1.2 模型的网格划分
将在CATIA中建好的三维模型导入有限元软件HyperMesh中。首先,进行必要的几何清理,清除模型中不需要特别关注的细节,如部分倒角、细小螺栓孔等。在有限元网格的划分中,对于变化平滑区域可采用单元尺寸大、网格密度小的策略;对变化剧烈、圆角过渡和拐角处,要求单元的尺寸小、网格密度大。计算精度和计算效率要做到平衡,因为为提高计算精度需要增加单元数量,往往会导致计算效率的下降[6-7]。
在HyperMesh中划分3D网格,所提供的方法有四面体划分网格法(tetramesh),Solid Map功能划分六面体网格方法,通过曲面创建3D网格的方法等。四面体网格计算效率高、计算精度较低;六面体网格计算精度高,计算效率较低。
将构建好的三维模型导入HyperMesh中后,首先对整个副车架的表面进行2D网格的划分。综合考虑有限元模型计算的效率和精度后,选择四面体网格,对划分的2D网格的参数设置如下:网格类型采用三角形,网格尺寸设置为10 mm,使用automesh命令进行网格划分;然后,对2D网格的质量进行检查和优化,主要是检查尖锐网格和自由边。尖锐网格质量较差会影响后期的分析计算精度,自由边会使构件的二维网格不能构成一个封闭的腔体,从而导致三维实体单元生成失败。最后,在确保尖锐网格和自由边被修复后,进行三维实体单元的生成即四面体单元的生成;使用tetramesh命令对建好的二维网格的腔体进行三维实体单元的生成,共计生成54 038个单元。结果如图2所示。

图2 副车架有限元模型示意图
2 副车架的静态应力仿真
2.1 副车架的受力分析
副车架固定在主车架上,主要结构有纵梁、横梁、基座、电动机底座、散热器底座以及水泵座,结构示意图如图3所示。副车架的纵梁采用的是厚度为6 mm的U型钢。副车架上装载的各个零部件的质量:电动机质量约为450 kg,水泵及其附件总质量约为100 kg,散热器质量约为150 kg。
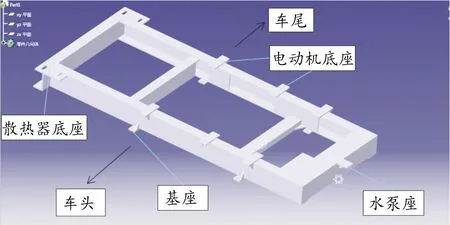
图3 副车架结构示意图
2.2 约束和载荷的施加
取底座的螺栓孔的节点进行约束的施加,限制6个自由度。根据提供的参数,将副车架上的主要零部件产生的载荷按2种方式加载,一种是以集中力的方式进行加载;一种是以质量结合相应加速度的方式进行加载。
对于水泵及其配件所产生的载荷使用集中力的方式进行加载;对于电动机和散热器所产生的载荷使用施加质量的方式:首先确定副车架上电动机和散热器的质心位置,通过RBE2刚性单元将部件的质心与固定连接部位的节点进行连接,然后对质心施加相应的质量。质量施加完成后,设置重力加速度,数值为g=9.8 m/s2。
为了实现对颠簸、转弯和加速工况的模拟,通过对整个模型施加一定大小和方向的加速度来实现对3种工况的模拟。
副车架位置示意图如图4所示。
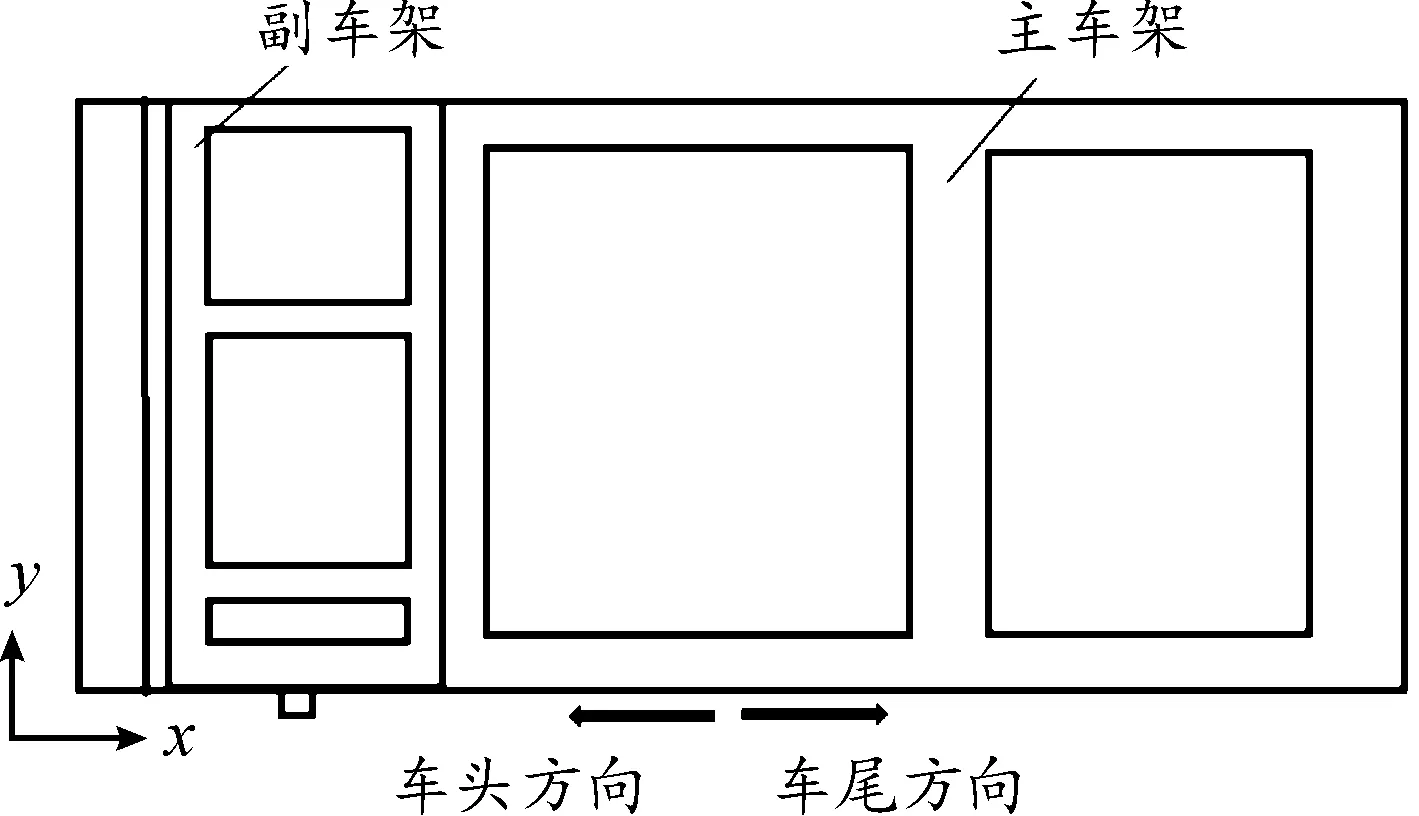
图4 副车架位置示意图
根据几种典型工况的悬架动行程频域特性分析[8],转弯工况下,选取加速度值为0.45g,方向垂直于车辆行驶方向,沿Y轴正方向;颠簸工况下,选取加速度值为2.1g,方向竖直向下,沿Z轴负方向;加速工况下,选取加速度值为0.5g,方向与车辆行驶方向一致,沿X轴负方向。约束、载荷施加完成后,建立载荷工步进行静态仿真计算。
3 求解与结果
3.1 颠簸工况下仿真与结果
在颠簸工况下对模型进行计算分析,得到的应变、应力的分布云图如图5、6所示。

图5 颠簸工况下的应变云图(放大200倍)

图6 颠簸工况下的应力云图
从图中可以看到,最大的变形量为0.318 9 mm,主要分布在副车架的后部即散热器安装的位置。将变形放大200倍后,可以看到车架在颠簸工况下主要产生的是竖直方向的弯曲变形,其中尾部的变形最大。最大应力值为42.41 MPa,主要分布在副车架前端水泵支座处;纵梁上后端部分分布有24 MPa左右的应力。将最大应力值与车架所用材料的屈服强度极限值 345 MPa 进行对比,显示车架的强度合格。
3.2 转弯工况下仿真与结果
在转弯工况下对模型进行计算分析,得到的应变、应力的分布云图如图7、8所示。从图中可以看到,最大的变形量为0.109 2 mm,主要分布在副车架的后部,即散热器安装的位置。将变形放大500倍后,可以看到车架在转弯工况下主要产生的仍是在尾部产生的竖直方向上的弯曲变形。最大应力值为16.63 MPa,应力主要分布在支架纵梁的后端处。将最大应力值与车架所用材料的屈服强度极限值 345 MPa 进行对比,车架的强度合格。

图7 转弯工况下的应变云图(放大500倍)

图8 转弯工况下的应力云图
3.3 加速工况下仿真与结果
在加速工况下对模型进行计算分析,得到的应变、应力的分布云图如图9、10所示。
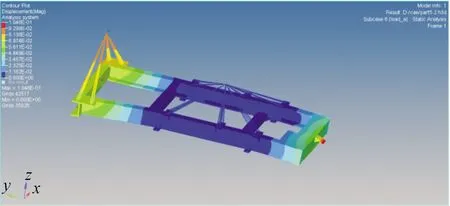
图9 加速工况应变云图(放大500倍)

图10 加速工况应力云图
从图中可以看到,最大的变形量为0.104 6 mm,主要分布在副车架的前端的水泵支座的位置。将变形放大500倍后,可以看到车架在加速工况下主要产生的是水泵支座的向下的弯曲变形,以及尾端少量弯曲变形。最大应力值为39.57 MPa,应力主要分布在支架纵梁与横梁的交接处、水泵支座处以及部件支座处。将最大应力值与副车架所用材料的屈服强度极限值 345 MPa 进行对比,显示副车架的强度合格。
4 优化设计
4.1 结果对比与分析
对车架进行3种工况下的静力分析后发现,各个工况下的应力分布情况基本相同,最大应力值也远低于屈服极限值345 MPa,所以整个车架的强度完全满足要求。同理,车架的变形情况基本相同,变形量在颠簸工况下最大为0.318 9 mm,在合理范围内,副车架的刚度完全满足要求。综上所述,副车架有一定的拓扑优化的空间。
3种工况下的应力值和分布情况都相差无几,在颠簸工况下应变有最大值,故主要考虑应变的情况下,采用颠簸工况作为拓扑优化的条件工况。
4.2 副车架拓扑优化
Optistruct拓扑优化的材料模式采用密度法(SIMP法),即将有限元设计模型设计空间的每个单元的“单元密度(density)”作为设计变量。该“单元密度”同结构的材料参数有关(单元密度与材料弹性模量E之间具有某种函数关系),0~1范围连续取值,优化求解后单元密度为1表示该单元位置处的材料很重要,需要保留;单元密度为0(或靠近0)表示该单元处的材料不重要,可以去除,从而达到材料的高效率利用,实现轻量化设计。
优化设计有三要素,即设计变量、目标函数和约束条件。优化数学模型可描述为:
Minimize:
f(X)=f(x1,x2,…,xn)
Subject to:
(1)
拓扑优化过程中,构造体积分数作为设计变量,建立体积分数和柔度的响应,设置的边界条件为上限0.3,即最多去除体积的70%,以柔度最小为设计目标,整个车架柔度最小时车架的刚度最大。设置完成后进行迭代计算、求解。最终的迭代结果如图11所示。图12是将单元密度设置为0.3时的拓扑优化的效果图。该模型共计进行了14次迭代,选取第14次迭代结果进行设计参考。

图11 副车架拓扑优化结果
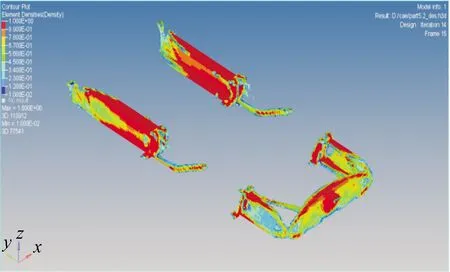
图12 单元密度为0.3时的效果图
对于结构拓扑优化问题,会不可避免地出现棋盘格现象。棋盘格现象指的是在结构的某些区域,设计变量直接在0~1范围变化,在优化结构中出现一种棋盘状的网格。这种格式可以使结构在局部体现出最刚的特性,理论上应是一种较优的排列格式,但棋盘格使结构形状的提取和制造变得困难,因而并不是需要的最优解。这种现象出现与优化问题解的存在性以及有限元近似的收敛性密切相关,是连续问题的解以“弱收敛”方式逼近原离散问题的真实解时出现的一种现象[9]。因此,由Optistruct求解器得到的副车架的拓扑优化的结果只能作为设计优化副车架的参考,一般不能直接按照拓扑优化的结果进行制造。
5 副车架改进及仿真验证
5.1 副车架改进
根据拓扑优化结果,采取在副车架适当部位加工减重孔的方法,对副车架进行轻量化设计。在拓扑优化结果中蓝色表示该部分材料不重要,可以去除;颜色越深表示材料越重要,要保留。因此,在副车架轻量化设计过程中参考优化结果,并结合实际制造加工情况,在颜色较浅处设计适当的减重孔。
具体改进方法:在原副车架两端纵梁侧面设计适当减重孔;在T型梁处设计适当减重孔;在安装散热器的底座部位即副车架尾部设计适当的减重孔。改进后的车架模型如图13所示。

图13 改进后的副车架模型
5.2 改进后模型仿真验证
将添加减重孔后的副车架模型导入HyperWorks中,使用HyperMesh对改进后的模型进行几何清理、网格划分,生成3D实体单元。为了实现更高的计算精度,网格参数如下:采用四面体网格,网格尺寸为5 mm。共计生成48 747个单元。
根据副车架实际受载和约束情况对副车架模型添加适当的载荷和约束。以颠簸工况作为设计优化工况对改进后的副车架模型进行载荷和约束施加。将添加过载荷和约束的副车架有限元模型导入到Optistruct求解器中进行静力学求解,对改进后的副车架进行仿真验证。
改进后的副车架模型的求解结果云图分别如图14、15所示。

图14 改进后副车架的应变云图

图15 改进后副车架的应力云图
仿真验证结果显示:在颠簸工况下,改进后副车架的整体最大变形为0.660 61 mm;改进后副车架的最大应力值为131.8 MPa;改进后副车架大部分结构应力值小于100 MPa。
5.3 结果分析
以颠簸工况为优化设计的条件工况,以颠簸工况下拓扑优化的结果作为参考,采用在原有副车架模型上添加减重孔的方法实现副车架的轻量化目标。
通过在相同工况下对改进后的副车架的仿真求解,得到改进后副车架的整体最大变形为0.660 61 mm,与改进前最大整体变形0.318 9 mm相比相差0.341 71 mm,变形满足车架的刚度要求;改进后副车架的最大应力值为131.8 MPa,与改进前最大应力值42.41 MPa相比相差89.39 MPa,仍小于副车架所用材料的屈服强度极限值 345 MPa,副车架的强度符合要求。
混合动力环卫车副车架轻量化之前总质量为42.458 kg;改进后的副车架质量为36.957 kg,改进后的副车架整体质量相较原车架减少12.96%。改进后副车架的刚度、强度均满足要求。混合动力环卫车辆副车架轻量化目标实现。
6 结论
以有限元的理论作为基础,采用三维造型软件CATIA建立起混合动力环卫车副车架的三维模型,并将建好的三维模型导入到HyperWorks中,建立副车架的有限元模型。使用Optistruct模块分别计算颠簸、加速和转弯3种工况下副车架的应力、应变分布情况。通过对比分析,选择颠簸工况作为拓扑优化的设计工况。
在拓扑优化中,以柔度最小为设计目标,设置体积分数作为设计变量,设置的边界条件为上限0.3,即最多去除体积的70%,进行拓扑优化。以最后1次拓扑优化的结果作为副车架优化设计的参考,采用添加减重孔的方法对原有副车架进行轻量化。将改进后的副车架在相同工况下进行仿真验证。改进后的副车架总质量降低了12.96%,优化后的副车架结构符合变形和强度要求。
副车架轻量化设计是一个系统、复杂、综合性的工程,涉及力学、材料和制造工艺等多种学科领域。本文中工作只涉及其中一部分,有很多方面值得进一步研究:结合副车架的模态分析,对副车架进行多目标的优化;结合新材料,对副车架进行基于多种材料的轻量化设计;除了软件仿真验证以外,在条件允许的情况下,对轻量化后副车架的各项性能指标进行试验验证。
猜你喜欢
中学生数理化·七年级数学人教版(2022年10期)2022-11-11
汽车实用技术(2022年16期)2022-08-31
物流技术与应用(2022年5期)2022-06-17
精密成形工程(2022年2期)2022-02-22
数学年刊A辑(中文版)(2019年3期)2019-10-08
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
中国自行车(2018年4期)2018-05-26
北京航空航天大学学报(2017年6期)2017-11-23
浙江大学学报(工学版)(2016年10期)2016-06-05