
多旋翼无人机倾斜摄影测量技术在水利工程测量中的应用
2021-11-03 01:06:38张亚林
四川水利 2021年5期
张亚林
(甘肃甘兰水利水电勘测设计院有限责任公司,兰州,733000)
1 引言
传统摄影测量需要进行大量像控点的布设,通过对空中三角形的解析来解算六个外方位元素[1]。在无人机测图时,GNSS通过差分可将摄影测量中心曝光时刻的三个空间位置信息提供出来,从而可将外业像控点减少[2]。对于无人机摄影测量而言,常用定位技术有实时动态差分(RTK)、事后动态差分(PPK),这两种差分方式在原理上存在差异,但在精度上基本一致[3]。传统方法进行1∶500地形图的测绘时,主要利用RTK、全站仪进行地物点、特征点三维坐标的实地采集,然后再使用软件进行地形图的编绘[4]。传统1∶500地形图测量采集的要素较多,且在精度上具有较高的要求,需投入大量测工进行实地采点、调绘。
近年来,随着航空摄影测量的发展,使得采用多旋翼无人机搭载多镜头的相机摄影测量技术已较为成熟,且在1∶500比例尺测图项目中应用广泛[5-7]。随着续航时间、飞控软件、载重量、定位精度等无人机参数优化提升,无人机摄影测图效率越来越高,无人机已取代传统人工测绘,成为大面积测图主流方式[8]。但传统航测未突破5cm点位中误差的要求,这对无人机在高精度测图项目中的应用造成了限制。因而,研发一种在大范围1∶500适应的无人机测图方案非常必要。和传统人工测量相比,无人机挂载倾斜摄影设备测量1∶500地形图时表现出迅速、灵活、作业范围广等优点[9]。无人机倾斜摄影测量技术是无人机进行多镜头相机搭载,对拍摄区域进行无死角、全方位拍摄,经内业差分处理可将三维实景模型制作出来[10]。倾斜摄影测量具有高精度、全面直观、低成本、高效等特点[11]。因此,本文在甘肃礼县某水库安全鉴定工程中使用无人机进行了1∶500地形图测绘。
2 无人机摄影测量技术
2.1 RTK技术及PPK技术
采用RTK技术作业时,在流动站及基准站间,流动站及CORS控制中心间建立实时通讯链路,网络RTK技术和常规RTK技术均方便快捷,可实时得到测量点位质量信息及三维坐标。常规RTK技术受电台功率、地形条件、数据链传输质量的影响较大,因作业距离短,需不停进行基准站的变换。在应用上,网络RTK取决于无线信号覆盖强弱、范围,同时还与控制中心解算软件稳定性及处理能力有关。PPK属于一种GNSS动态数据后处理技术(获取厘米级定位精度信息的后处理差分技术),不受地形限制,流动站及基准站GNSS接收机进行对采集的原始观测数据处理后,测量精度可达到厘米级。本研究使用大疆经纬M300无人机,其主要参数详见表1。

表1 大疆经纬M300无人机主要参数
2.2 RTK及PPK测量技术工作原理
RTK技术是基于载波相位为观测量实时差分测量技术,其工作原理是在基准站安装数据发送电台及GPS接收机,实时发送基准站位置信息及观测量信息给流动站。流动站对四颗以上的卫星信号进行实时接收,并对基准站电台发送的观测数据、差分改正数据进行接收,将用户位置实时解算出来。RTK技术能将流动站、基准站公有误差大幅度消弱,可将定位精度大幅提高。RTK定位精度可达到厘米级别。
PPK测量系统由流动站、基准站组成,用户不需要配备数据通信链路。其工作原理是采用一台基准站接收机及流动站接收机,保持流动站、基准站对可见卫星连续进行同步观测,形成对卫星载波相位观测量。结束观测后,使用GNSS软件处理数据,从而可将基准站、流动站间的空间相对位置计算出来,在软件里将基准站已知坐标进行固定,平差获得流动站坐标。PPK技术随GNSS数据处理技术、软硬件技术的发展,尤其是无人机摄影测量技术的日渐发展,其应用范围日趋扩大。目前,无人机均具有PPK作业及数据处理功能。图1为PPK技术作业基本流程。
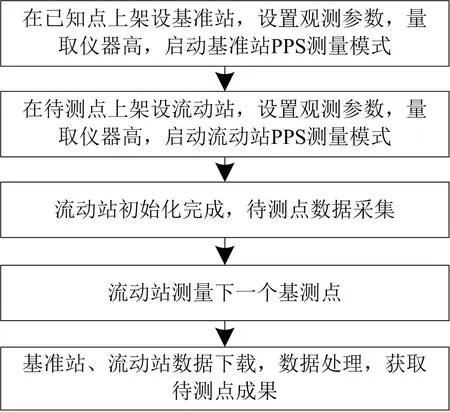
图1 PPK技术作业基本流程
倾斜摄影测量是在无人机上搭载一台单镜头相机或多镜头相机,从斜视、下视等不同视场角度获取影像,完整表达地物情况。垂直影像是相对于地面成90°夹角拍摄的影像,倾斜影像是相对于地面有相对应夹角拍摄的影像。倾斜相机是倾角大于15°的拍摄相机。无人机倾斜摄影系统由无人飞行器平台、操作人员、航拍设备组成。无人飞行器平台分为固定翼无人机、多旋翼无人机;操作人员由地面站指挥员、无人机驾驶员组成;航拍设备由姿态定位系统、倾斜相机组成。无人机航空摄影包括无人机作业飞行、发射、数据检查、无人机回收等步骤。选择适宜起降场地,在飞行指令接收到后,发射无人机。无人机集成可高精度差分系统只需获取地面端的基站数据及无人机端的差分数据。无人机飞行任务完成后,返航到降落点上空,在操控员掌控下,用遥控器切换到人员操纵模式,引导无人机着陆。从存储设备中将差分数据、影像数据导出,检查数据。后期处理流程包含空中三角测量、数据预处理、点云建模等步骤。图2为内业处理流程。

图2 内业处理流程
3 1∶500地形图制作
利用EPS测图软件进行三维实景影像成果立体采集,对1∶500线划地形图进行测制,包含四个步骤:
步骤一是绘制建筑物外部轮廓:通过建筑物侧面形状数据,对建筑侧面轮廓的基点进行绘制,形成闭合线状要素,根据三维模型对建筑物特征进行确定,赋予要素建筑物属性信息。
步骤二是绘制线状地物:通过倾斜模型绘制线状地物,在三维模型上,直观展现地物平面高程、位置、属性特征等,快速提取要素内容。
步骤三是提取高程:倾斜模型上有高程信息,在模型上快速提取高程数据。
步骤四是修饰地形图:完成绘制后,对照倾斜摄影模型检查图面进行注记,对要素进行修饰绘制。
4 无人机倾斜摄影1∶500地形图的测绘实例
4.1 测区概况
本次航摄测区为某水电工程区1∶500地形图测绘,此测量区域内包含了水库以及山地,而测区则是水库及水库周边山地,其平均海拔大概达1650m,航摄测区的面积约2.0km2,图3为测区范围,表2为部分像控点数据。
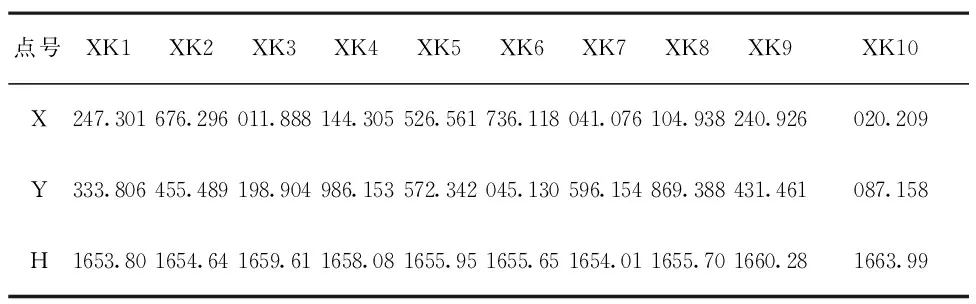
表2 部分像控点数据 (单位:m)

图3 测区范围
为满足模型精度,测区内共布设像控点15个。
4.2 航线规划设计
在无人机航摄开始飞行之前,依据成图,应当计算飞行作业时的航飞参数,比如摄影比例尺以及计算航线的间距、航行高度等。
4.2.1 确定地面分辨率和航髙
依据所需的成图比例尺的条件来明确地面的分辨率,表3为地面成图比例尺以及分辨率间的对应表。

表3 地面成图比例尺和分辨率对应
摄影航高所指的是和地面相对而言,摄影平台的基准面所具有的高度[10]。航高的算式是:f/H=像元尺寸/H,(其中,f为焦距,H为摄影航高)。以GSD标示着地面的分辨率,基于相机校验而得出f以及像元尺寸。本次航飞采用赛尔102S,像元尺寸为3.9um,焦距为35mm。
4.2.2 像片重叠度及航线参数设置
依据低空数字航空摄影的规范要求,航向的重叠度采用80%,旁向重叠度采用70%。基于测区范围,明确出航线的起点以及终点、航线的方向、间隔、长度以及航线数量。航线的间隔宽度以及基线的长度计算可采用下列求算式:
bx=Lx×(1-px)
dy=Ly×(1-pr)
Bx=bx×(H/f)
Dy=dy×(H/F)
上式中,bx为像片上的摄影基线长度;BX为实地摄影的基线长度;dy为航线间隔宽度;px为航向重叠度;DY为实地航线的间隔宽度;Lx为像幅长度;pr为旁向重叠度;H为摄影航高;Ly为像幅宽度;f为镜头焦距。
4.3 基于大疆制图软件进行航测数据处理
大疆制图软件数据处理过程完全自动化,操作比较简易、处理的速度也很快;快速化地自动生成DOM以及DSM,并针对倾斜影像实施自动化匀色处理;通常在测区边缘以内、测区中间布置像控点。设置好像控点坐标系并将像控点文件导入,刺点后提交空中三角测量,生成实景三维模型。具体流程如图4所示。

图4 空中三角测量流程
图5为水库倾斜三维模型,空洞区为水库水面,无法生成三维模型。

图5 水库倾斜三维模型
4.4 数据编辑
在10.1的CASS大比例尺专业图形编辑软件中编辑1∶500地形图,图6是局部的1∶500地形图。
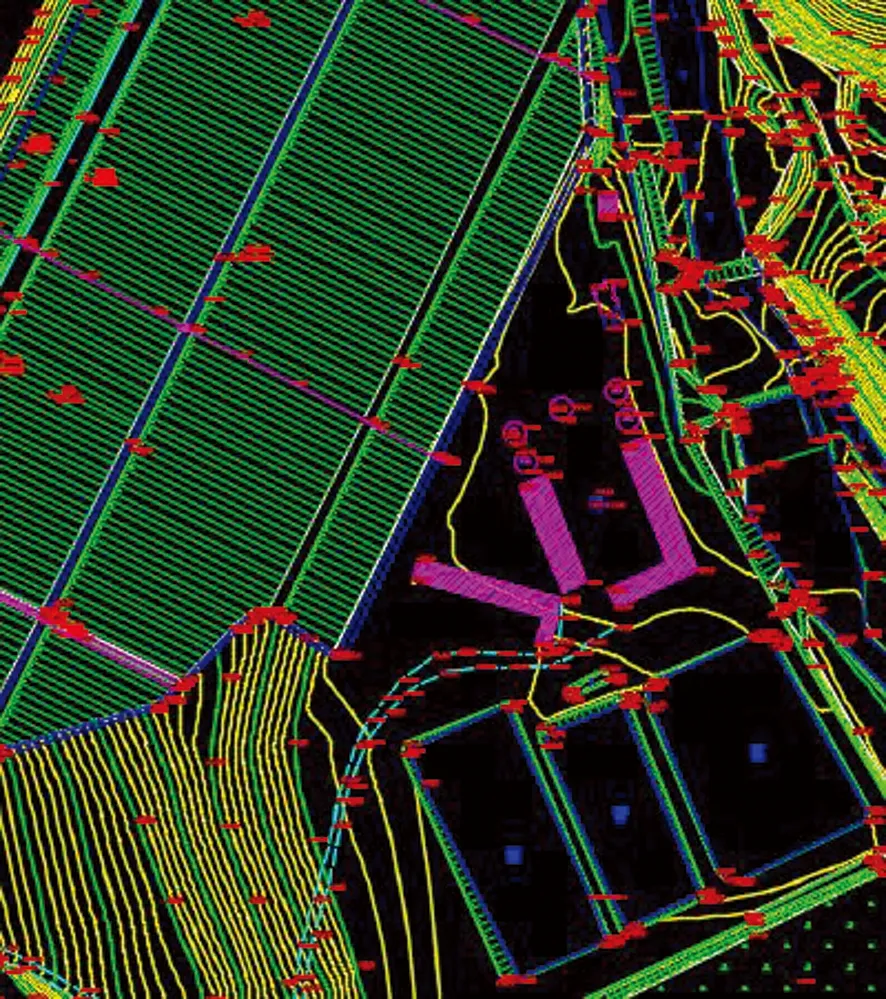
图6 局部1∶500地形图
4.5 地形图精度评定
依据《数字测绘成果质量检查与验收》(GB/T 18316-2008)以及《测绘成果质量检查与验收》(GB/T 24356—2009)的要求来针对工程区的1∶500地形图展开图面检查,借助于外业的检查点与地形图进行对比,是否满足规范精度要求。
4.5.1 地形图平面精度评定
此次的实地量测量总共有30个平面检查点,对工程测区之内的地形图平面精度加以检验,表4是测验区内部中分地形图之平面检查点的精度统计。
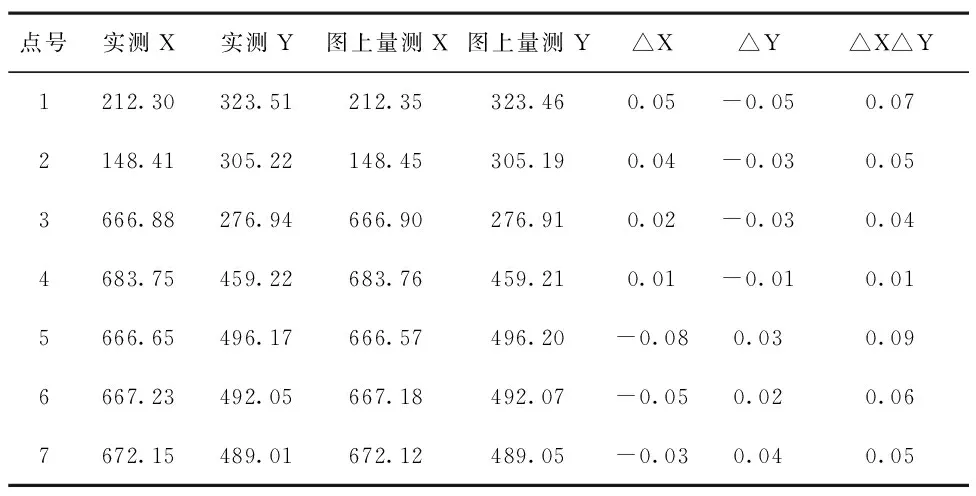
表4 测区内部分地形图之平面检查点的精度统计(m)
从表4可知,检查点的最小点位误差是0.01m,而检查点的最大点位误差则是0.10m,本测区为一般地区,依比例尺1∶500的计算,由表5能够知,可得出容许点位中误差限差达到1.59m。此次的地形图测量其点位中误差可满足比例尺1∶500地形图的精度要求。

表5 图上地物点的点位中误差 (单位:mm)
4.5.2 地形图高程精度评定
本项目工程区1∶500地形图一幅,对测区之中的地形图的高程精度加以检验,可用外业实测的检查点来对内业地形图的高程作出测量。表6是1∶500地形图中的一些高程检查统计数据。
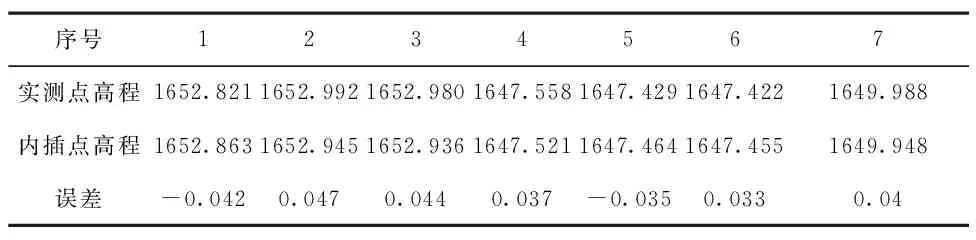
表6 1∶500地形图部分高程检查统计 (单位:m)
从表6可见,根据数据所得中误差为0.037m,地形图高程的精度切合于具体的精度要求。经对于地形图的高程精度以及平面精度的具体分析可知,工程区的地形图1∶500其精度是与规范要求相符的,而且质量优良。
5 结语
多旋翼无人机倾斜摄影测量技术近年来在测绘行业应用广泛,本文基于甘肃礼县某水库安全鉴定工程使用无人机进行了1∶500地形图测绘,对无人机低空摄影测量技术基本流程及关键技术进行系统介绍。经与野外实测点对比,平面及高程精度满足规范中对1∶500地形测图的精度要求。通过该技术可实现水库多源地理信息数据的快速获取,同时获取的地表模型数据、点云数据、影像数据可为水库工程设计、施工等提供有效数据支撑。
猜你喜欢
中国港湾建设(2023年12期)2023-12-27 17:19:58
科学导报(2023年84期)2023-12-17 16:29:04
山东煤炭科技(2022年6期)2022-07-14 03:10:40
新世纪智能(数学备考)(2021年5期)2021-07-28 06:19:46
河北地质(2021年4期)2021-03-08 01:59:14
中国铁道科学(2019年5期)2019-10-19 07:55:14
测绘通报(2018年10期)2018-11-02 10:07:28
黑龙江工程学院学报(2015年2期)2015-04-19 00:43:13
信息安全研究(2015年3期)2015-02-28 20:17:57
太空探索(2014年1期)2014-07-10 13:41:50
