内河船舶编队技术开启新程
2021-11-03 10:46武汉理工大学刘佳仑董智霖李诗杰
中国船检 2021年10期
武汉理工大学 刘佳仑 董智霖 游 旭 李诗杰

自2015年中国船级社发布第一版《智能船舶规范》以来,国内智能船舶的发展日新月异,而智能船舶技术在航运业中的需求不断增加。中国船级社于2020年更新发布《智能船舶规范》,强调了智能船舶利用传感器、通讯、互联网等技术使得智能船舶具有更安全、环保、经济、高效的特点。
受疫情影响,全球经济大幅下降,世界各国都在举力开展基建行动。近日交通运输部发布了《交通运输领域新型基础设施建设行动方案(2021—2025年)》,其中包括智慧航道建设行动和智慧港口建设行动。交通强国建设纲要、内河航运发展纲要、双碳战略目标等为发展符合内河运输要求的船舶编队技术指明了方向。
智能船舶编队研究现状
1、智能船舶编队研究动态
2006年,挪威科技大学与挪威海事机器人协会联合,对智能船舶编队进行了深入研究并进行了实船试验。挪威海事机器人协会提供的实验船舶有:8.5米长的Viknes无人艇一艘、6.5米长的Mariner无人艇一艘和30米长的Gunnerus船一艘,如图1所示,介绍了编队改变队形任务时的控制情况。

图1 改变队形时的编队控制情况
2017年,在欧盟地平线2020项目的资助下,NOVIMAR(NOVel Iwt and MARitime transport concepts)项目成立,来自不同国家的20余个机构共同参与(见图 2)。项目引入虚拟仿真概念,采用由远程驾驶航行的领导船与其他无人的跟随船构成编队系统。
2018年1月23日,该项目在DST(Development Centre for Ship Technology and Transport Systems)的实验水池开展研究模型试验,研究了两艘内河船舶的前后向相互作用。2021年3月,该项目在荷兰Harngvliet采用两条船型相同的全尺寸实船进行了编队航行演示和虚拟避障等试验。
目前,NOVIMAR项目围绕Vessel Train系统架构、虚拟仿真、物理实验等内容进行研究探索,包括概念提出、虚拟仿真、模型试验和实船试验等研发流程。结合现有船舶技术的发展,提出以领导跟随的编队模式进行控制,跟随船可由领导船控制,紧急情况下可由船上船员进行控制。船型设计上,采用新型的滚装船设计以满足内河近海的货运需求。货物联运上,研发新型货物装卸系统,提升了集装箱的装卸效率,进一步提高了运输效率。

图2 NOVIMAR项目
2、船舶编队技术概括
受到鸟类聚集、蚁群、蜂拥等自然行为的启发(如图 3),科研人员开始探究可以同时控制多条智能船的方法,船舶编队技术便应运而生。船舶编队技术的实现可以提供更高的效率和更优的性能,解决单船运载能力不足、处理信息能力弱等缺点。同时随着计算机科学技术、通讯技术、导航技术的发展日新月异,利用这些先进的技术可以给船舶编队提供更多的优势。
船舶编队实现航行的逻辑与单智能船舶实现航行的逻辑无异,即通过感知—决策—控制—感知这一闭环逻辑来进行。
船舶编队的感知部分与单智能船舶的感知相似,通过各类传感器对于外界环境和自身状态的检测,实现对于船舶状态的监控(如图 4)。与单智能船舶感知不同在于:多船的感知信息需由中心处理器统一储存并被视为影响因子用于船舶编队的决策部分。
船舶编队的决策部分,需要考虑到单位时间内,各个船舶的相对位置,运动姿态以及环境状态的不同,通过全局路径规划、局部路径规划、编队队形规划来进行决策,使得船舶编队能在进出港、闸口、密集交通流、突遇障碍物等场景下安全通航。
船舶编队的控制部分可分为编队的控制结构和控制方法。根据Peng Z等人的介绍,控制结构目前多为三种(如图 5),每种控制结构都有着不同的特点。
(1)集中式控制:在编队中选择一个船舶或远程地面站作为中心控制站,整合其他船发来的信息后再发出指令,可以使用全局最优取代局部最优来优化目标。这种控制结构比较简单,并且容易实现,效果也比较好,但随着船舶数量的增加,计算资源和通信带宽的最低要求也会急剧增加。同时这种控制结构比较容易受到故障的影响,任何的交流能力的丧失都会使整个系统失去稳定,导致整个编队系统瓦解。
(2)分散式控制:编队不需要中心控制器,且由船舶的本地传感器测量的信息只有部分是有用的。分散式控制是具有模块化,可伸缩性的特点。这些特点使得使用分散式控制的编队具有可以容忍单个故障的优势。但是,分散式控制也有着显著的不足,其只能实现局部最优,船舶间没有信息参数的交流。
(3)分布式控制:使用分布式控制,所有船舶都执行本地控制器的指令,并且通过本地感应或通信在船舶间进行信息交换。分布式控制系统的特点是整个编队系统没有中心控制器,每个个体通过局部的控制器控制后再在个体间交换信息。这种控制结构的不足在于,其在结构和组织上比集中式和分散式控制要复杂得多。但是,在计算资源有限,通信范围短,通信带宽窄以及船舶尺寸较大的情况下,分布式控制具有更好的效果。
船舶编队的控制方法常用的有领导者-跟随者法、虚拟结构法、人工势场法、基于图论法和基于行为法等方法。

图3 动物集群自然行为
内河船舶编队技术的应用价值
上世纪九十年代,轮驳搭配拖带的船队运输模式还是长江中下游干散货运输的主流方式。如今随着水运市场的开放,曾经无限辉煌的船队,被新型的货轮所代替。
传统的内河编队采用的是船舶轮驳间使用短缆相连,在风浪中船、驳间的相对运动大,缆绳的受力变大,导致船队的适航性差。同时根据相关机构调研,相比于拖带航行的船队,新型货轮的适航性更好,需要停港避风的时间也大大减少。
随着国家在政策上的支持,各类高端技术的应用以及智能化交通发展趋势,内河船舶编队技术的价值会得到更多体现。
1、行业形势
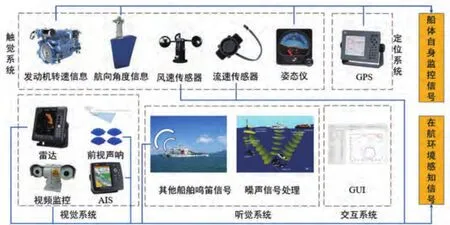
图4 智能船舶感知模块
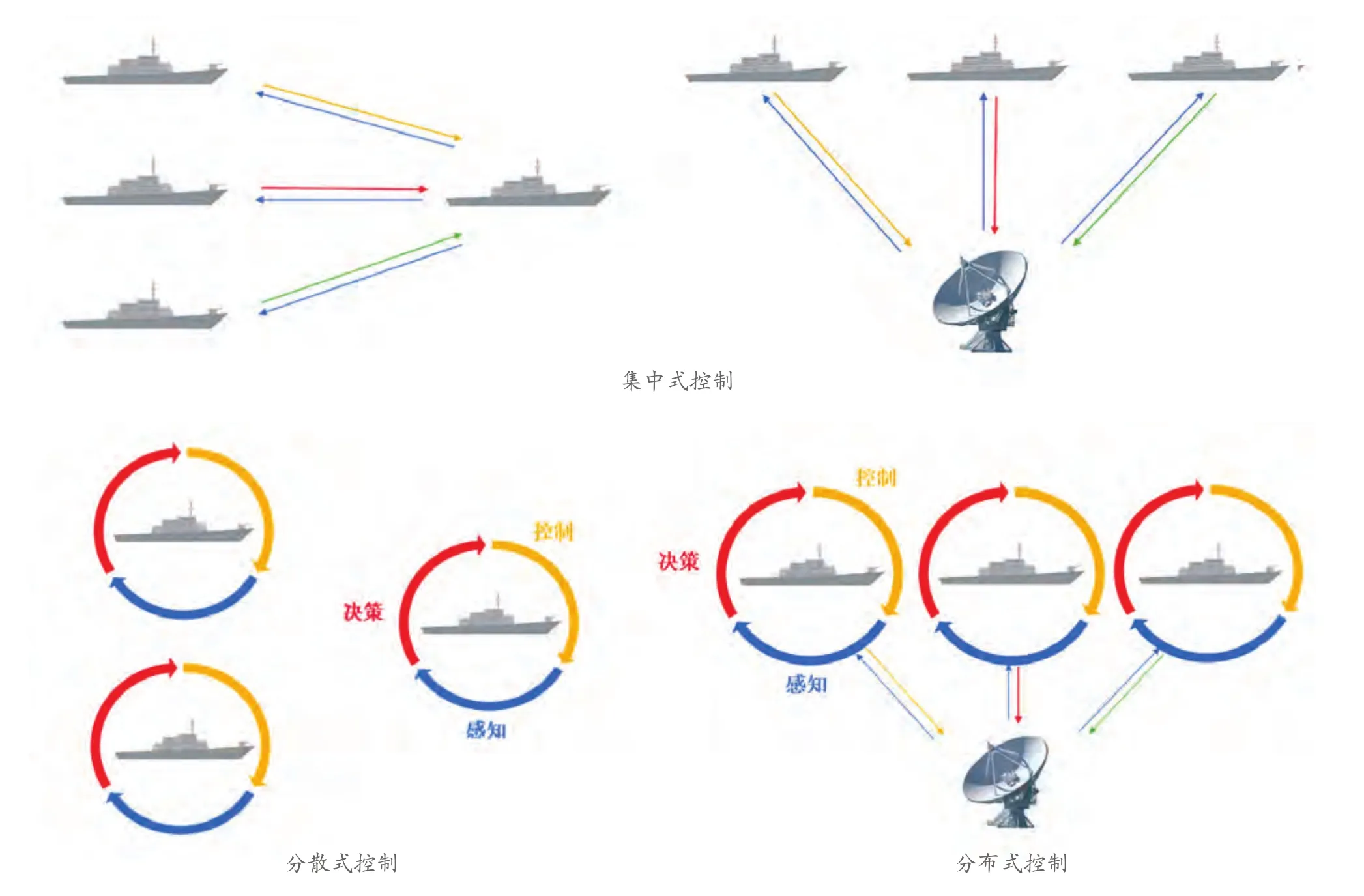
图5 编队控制结构
受疫情影响,全球经济遭受重创,世界各国政府为了促进经济快速复苏,纷纷推出基建计划。专业人士预估,今年全球基建预算有望达到2.76万亿美元,且逐年追加,到2031年将超过3.3万亿美元。而基建需求的提升有助于大型散货船市场需求。慧洋海运董事长蓝俊表示,过去十多年航运业长期低迷,船东造船量持续维持在低位,造成了现在全球船队整体船龄偏大,船舶供给小于需求。2023年IMO的EXII和CII新规以及二氧化碳减排政策,将会加速老旧船的淘汰,缺船现象会更严重。随着智慧航道和智慧港口的积极建设,研发、制造符合新规标准,满足行业发展需求的内河船舶编队是符合国际行情以及行业走势的。
2、运营效益
我国河流众多、水量充沛,形成以长江干线、长江三角航道网和珠江三角航道一纵两网的内河航道网格,具备着良好的运输条件。历史上我国对发展内河运输的看法不一致,内河航道建设投入资金缺乏,导致内河航运发展较为缓慢,同时我国内河船舶的建造成本比较低,运输吨位小,运输能力不能充分发挥。大部分船舶存在老旧、技术设备落后的情况。
根据中国海事局发布的《内河船舶最低安全配员标准》《中华人民共和国海员船上工作和生活条件管理办法》和国际劳工组织大会制定的《2006年海事劳工公约》要求,在内河船舶进行一个航次时,需配备对应数量的从业人员,且需为其配置特殊的工作权益及生活环境。以长江航行的自航船和船队为例,5000吨级的船舶在船人员一般为16人,而根据相关海事规定,12000吨级的中型船队在船人员不得少于36人。同时传统船舶有许多不能用于载货且又必须设置舱室,如机舱工作间、驾驶台、船员宿舍、船员食堂、杂货间、杂货仓、淡水仓等。
内河船舶编队的运营只需相关监管技术人员进行轮岗制,可降低人工成本,而传统船舶上的船员活动空间可以设计为载货空间,提高载货量,一定程度上增加了运营效益。
3、航行安全
据海事局统计,所有的船舶安全事故中由人为因素造成的事故占比为85%。人员的失误操作、对规则制度的漠视、以及处理事故时的不及时是造成重大事故的直接原因。内河船舶编队控制结构的特性使得编队具有分散度高、局部感知能力强的特点,可以把编队中每个终端的探测信息进行汇总融合,在进行操作任务时有着完整的操作流程,对于自身状态信息和环境信息的获取相较人工更加精准和快速。通过编队配置的大量科学设备进行自主耦合分析、自主耦合操作,可大大减少因疏忽而发生安全事故的可能性。
4、航行环保
百分之九十以上的传统船舶使用的都是柴油发动机,根据IMO的第四次温室气体研究报告,在2012至2018年间,国际海运温室气体年排放量从9.77亿吨增加到10.76亿吨。预计到2050年,随着海运需求的不断增长,二氧化碳排放量将比2018年增长约50%。智能船舶编队使用清洁混动能源结合燃料电池、太阳能等,在岸基可配备快充电桩或无线充电桩对船舶编队进行供能。
5、航行能效
随着燃油价格的持续飙升,航运载货的成本在不断增加,同时传统船舶会排放大量污染气体加剧全球的温室效应,所以,航运业的节能减排是刻不容缓的。通过统计和评估能耗情况,可以提高船舶各个能耗设备的能效水平,达到减排的效果。传统船舶的管理手段基本靠人工统计分析,具有不准确性和滞后性,采用智能船舶编队,可以利用编队的优势来减少船队个体和整体的能源消耗。可以利用自动化的方式,自动检测编队能耗情况,统计分析能效水平,提供优化建议,提高能源的利用率。
内河智能船舶编队关键技术
1、集群控制算法
智能船舶只有确定了相互的信息关系、逻辑关系和控制关系才能够实现彼此之间的协同。集群控制算法需为船舶编队的信息交流和控制方式提供框架,保证编队间交互的流畅。常见的集群控制方式有集中式、分散式、分布式三种。优质的集群控制算法应保证当智能船舶数量增减、控制方式改变时,编队整体的控制效果不受影响。
2、路径规划技术
内河船舶编队的路径规划技术包括三个部分,第一部分:全局路径规划,编队的中心处理器应计算并存储由出发点到目的点的最优路径解,作为编队行驶的基础航线;第二部分:局部路径规划,编队的中心处理器应根据未来一段时间或路径的变化计算并存储未来一段时间或路径内的最优路径解,作为编队行驶的修正航线;第三部分:个体路径规划,在编队航行的过程中会遇到进出港口、过闸、交通流变大、突遇障碍物等特殊场景。为避免实时编队无法满足上述场景要求,在场景发生改变时必须对个体的路径进行重新规划。个体路径规划算法具有实时性和高效性的特点。
3、任务规划技术
为实现内河船舶编队的自主性,智能船舶的行为不应全部依赖于编队。编队过程中的基本行为由编队整体进行,而其中的简单任务应由对应单一智能船舶自主完成,如船舶自主过闸、自主靠泊等。每个船舶都需把即将执行的任务发送至中央处理器由其存储,处理器根据每个船舶的当前任务来决策编队行为信息。
4、编队控制技术
内河船舶编队的航行,可以看作一个高阶集群系统的时变编队问题,航行环境的变化、通讯质量的不稳定都会为编队的数据收集分析增加挑战,常见的编队控制方法有领导者-跟随者方法、虚拟结构法、人工势场法等。
5、网络通讯技术
在内河智能船舶编队系统中,每个智能船舶都将作为通讯节点,网络的拓扑结构由编队的空间分布决定,不同的拓扑结构对应着不同的通讯性能,网络通讯技术在一定的拓扑结构和通信性能下,根据任务分配通信资源,并提升通讯的质量。
总结与展望
内河智能船舶编队技术的创新与应用符合国际航运业、造船业发展行情,满足世界低碳减排趋势,顺应国家发展水路运输推动基建政策。内河船舶编队技术的应用,将会提高内河输运的效率,发挥内河运输的优势,在倡导绿色运输的同时保障了运输的安全性。可以实现既节能又增量的双赢。但内河船舶编队技术同样也面临着发展的瓶颈:
1、编队通讯:相比于远洋运输,内河里的船舶数量多、种类多,船舶需要的决策更多,信息传递的准确可靠就显得更为重要,如何保持网络通信的稳定可靠以及如何在出现网络延时、数据丢失和数据混乱的情况下自主开发新的基于网络的编队模型是实现编队过程中待解决的问题。
2、编队决策:在内河航行的编队,不仅面对的是编队与他船间的避碰,更多的是编队内多船协调控制的问题,目前在单智能船避碰障碍物技术上,已经取得了很大的进展,但对于多艘智能船组成的编队,这仍然是个还未解决的挑战。在不同场景下,编队需进行队形转换,而怎样实现编队间的无碰撞协调还需要进一步的研究佐证。
3、编队控制:目前已公布的编队协调控制律多是基于现代控制理论的,控制律的设计是在数学模型已知的情况下得到的。实际情况中编队里的船舶种类可能各不相同,有单体船也会有双体、三体船,推进方式有单桨单舵推进也会有双桨双舵、全回转推进等,复杂的编队数学模型和水动力模型需要更多的时间来佐证完善,同时编队对自身状态和外界环境的感知影响着算法决策,如何进行高效的信息筛选、数据匹配和冲突消解也是非常重要的问题。
4、编队安全:在内河船舶编队的实际运营中,最需担心的就是编队的安全问题,相比于仿真实验不同,编队在实际航道内航行可能会遇到各种各样的问题,如何在遇到突发事件的情况下确保编队和有关航道、港口环境的安全,对于多种突发事件的预处理安排如何制定。
5、法律条例:到目前为止,针对船舶编队甚至单智能船舶操作的相关海事法规尚未出台。法律法规的制定是如何应用内河船舶编队技术的重点。
总的来说,当前内河船舶编队技术,如编队环境感知技术、编队状态检测技术、编队控制技术等存在一定的理论基础,但编队路径规划、编队自主航行、编队能效控制等技术距离实际应用仍有较大距离。当前,内河船舶编队技术仍处于理论验证阶段,距离推广应用仍有较远距离,需要在智能船舶相关技术的不断发展下,经过大量的试验、验证与评估才能成为现实。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
船舶(2021年4期)2021-09-07
科学与财富(2021年35期)2021-05-10
西部交通科技(2021年9期)2021-01-11
城市管理与科技(2018年1期)2018-08-21
名作欣赏(2017年11期)2017-01-28
航运交易公报(2016年40期)2016-11-22
航空知识(2001年5期)2001-06-12