基于间歇励磁和信号重构的电磁水表变送器研制
2021-11-01 12:05:24于新龙徐科军吴建平闫小雪
计量学报 2021年9期
于新龙, 徐科军, 许 伟, 吴建平,闫小雪
(合肥工业大学 电气与自动化工程学院, 安徽 合肥 230009)
1 引 言
电磁水表是一种基于电磁感应原理的流量测量仪表,主要用于生活用水的测量,以取代机械式水表。机械水表依靠水流推动表内机械部件运动来测量用水量,始动流量大,测量准确度低,易磨损,跑冒滴漏现象严重。电磁水表具有管道内无阻挡体、始动流量低、测量准确度高、不易磨损和性能稳定等优点,能够提高水计量的准确性,在生活用水计量中具有很大优势。电磁水表与普通的电磁流量计具有相同的原理和类似的结构,但是,由于应用场合的不同,电磁水表与普通电磁流量计在测量要求和技术指标方面有着明显的不同。
1)量程比。普通电磁流量计的量程比一般为20~25,而电磁水表的量程比为400左右[1]。
2)流量的测量下限。普通电磁流量计测量是流速下限一般为0.5 m/s,要求高的为0.3 m/s[2];而电磁水表的测量下限要做到30 mm/s,要求高的为20 mm/s。
3)功耗。生活用水计量的大部分应用场合难以接入电网,所以电磁水表一般采用电池供电[1]。这就要求电磁水表必须大幅度降低功耗,而为了降低功耗,电磁水表的励磁电流一般降到20~40 mA,远低于电磁流量计在流量测量时的励磁电流[3~5]。
4)传感器信号微弱。和普通电磁流量计相比, 电磁水表由于励磁电流小,导致传感器的原始信号幅值较小,而电磁水表的测量下限又远低于普通电磁流量计,这导致电磁水表小流量测量时的信号非常微弱,小流速测量时受干扰影响很大。因此,做到稳定、精确地测量小流速是比较困难的[6]。
虽然国外公司已经生产出了电磁水表,并给出性能指标,但是,均没有披露具体的技术细节。对电磁水表进行深入研究的论文非常少。文献[7]简单介绍了电磁水表具有低功耗和寿命长的优点;文献[8]简单介绍了MSP430单片机在新型智能水表中的应用;文献[9,10]介绍了电磁水表的工作原理和技术特点;文献[11]为电磁水表设计了一款霍尔效应传感器来消除噪声干扰,降低功耗。但是,上述文献均未涉及电磁水表变送器的研制。为此,设计间歇励磁方式,每周期一次三值波励磁,以降低励磁功耗,实现电磁水表的低功耗;提出幅值解调和重构滤波的信号处理方法,去除工频干扰、极化干扰、微分干扰和同相干扰等,以保证极小流量的准确、稳定测量。研制基于MSP430低功耗单片机的变送器,实时实现数字信号处理方案,并进行水流量标定实验。
2 方案设计
2.1 间歇式励磁方式
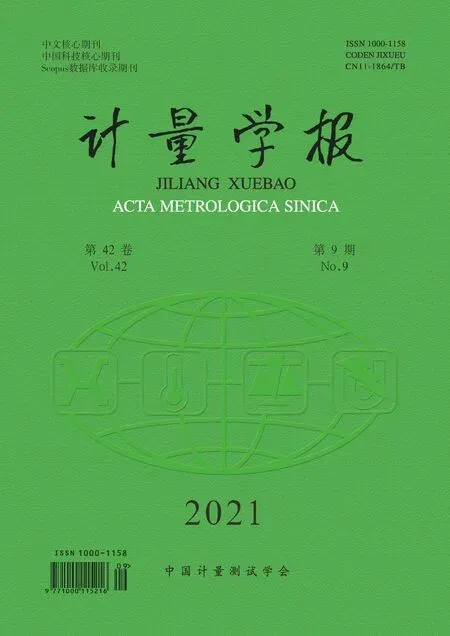
电磁水表采用电池供电,这要求其在工作时具有较低的功耗,以保证电池能有较长的使用期限。而励磁系统是电磁水表功耗最大的部分,所以,为了降低功耗,延长其使用时间,设计了间歇励磁方式。间歇励磁方式为每周期一次三值波励磁,剩余时间励磁不工作。励磁电流波形如图1所示。每周期共分为5段。D1~D4段分别为三值波励磁的正励磁段、零励磁段、负励磁段和零励磁段。每段时间相同,时间宽度可调,并保持为工频周期的整数倍。其中,D1和D3段为励磁工作段,对应励磁线圈中的电流分别为正向和反向;D2、D4段以及每周期的剩余时间段D5段励磁不工作,励磁线圈中的电流为零。
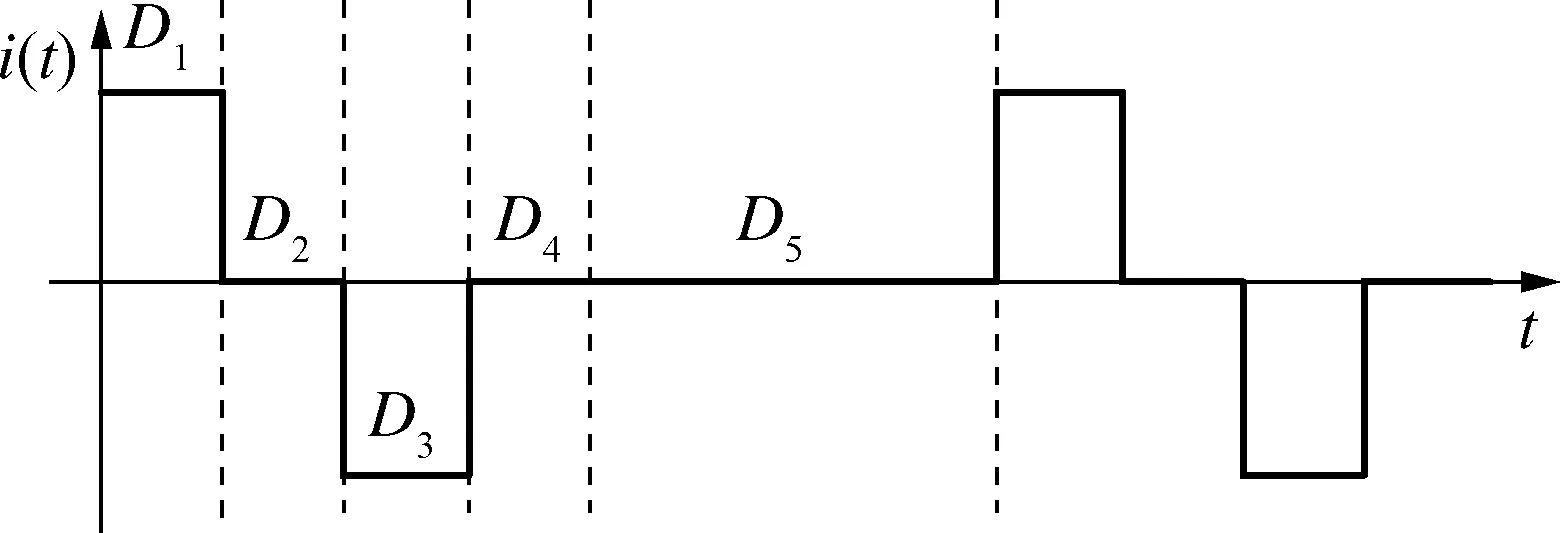
图1 励磁电流Fig.1 Excitation current
由于电磁水表在每周期中只有D1和D3两段时间励磁才工作,即每周期的励磁工作时间固定,则励磁功耗可随着励磁频率的降低而减小。在标定时,为了保证有较高的响应速度,可将励磁频率设置为1~5 Hz。而在实际工作中,由于生活用水的测量主要是累计一段时间的用水量,对电磁水表的响应速度要求不高,所以,在实际测量时,为了降低励磁功耗,励磁频率可设置为1/15 Hz或1/30 Hz。而D1~D4段的每段间隔时间较短,同时每段时间正好为工频周期的整数倍,因此在这种励磁工作方式下,还可以通过幅值解调来抑制流量信号中的极化干扰和工频干扰。
2.2 重构滤波信号处理方法
由于电磁水表采用间歇式励磁方式,即每周期一次三值波励磁,则导电液体流经励磁电流产生的磁场时,感应产生的传感器输出信号同样为每周期一个三值波,如图2所示。
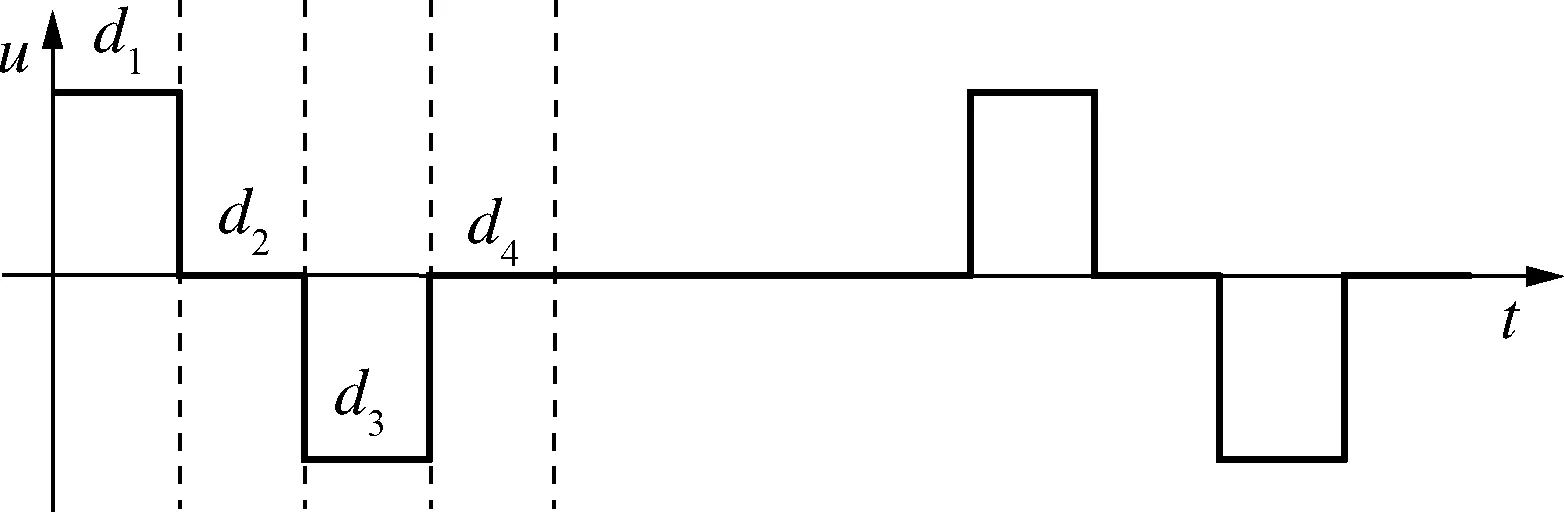
图2 传感器信号Fig.2 Sensor signal
图2中,d1~d4分别为与D1~D4励磁段对应的传感器信号段后半段的均值。为了抑制传感器信号中工频干扰和极化干扰,采用(d1-d2)-(d3-d4)的幅值解调计算方法。
虽然幅值解调能有效地抑制传感器输出信号中的工频干扰和极化干扰,但是,传感器信号中还存在其它噪声,如微分干扰、同相干扰、串模干扰、共模干扰等。为了将流量信号与噪声分离,采用梳状带通滤波器对传感器信号进行滤波。这是因为梳状带通滤波能保留特定的频率分量,抑制其它的频率分量,这样就能提取出传感器输出信号中的流量信号,实现流量的准确测量。但是,对间歇励磁方式产生的传感器信号进行频谱分析发现:传感器输出信号中既有奇次谐波分量,也有偶次谐波分量,流量信号的频谱与噪声频谱混杂,且流量信号频谱不只是励磁频率的奇数倍。传感器信号的幅值谱如图3所示。而梳状带通滤波提取信号的奇次谐波分量,衰减偶次谐波分量。若对间歇励磁产生的传感器信号直接进行梳状带通滤波,滤波后会造成流量信号的衰减,无法实现流量的准确测量。所以,不能直接采用在普通电磁流量计中常用的梳状带通滤波处理传感器输出信号[12]。为此,提出重构滤波的信号处理方法,以便对传感器信号进行梳状带通滤波。
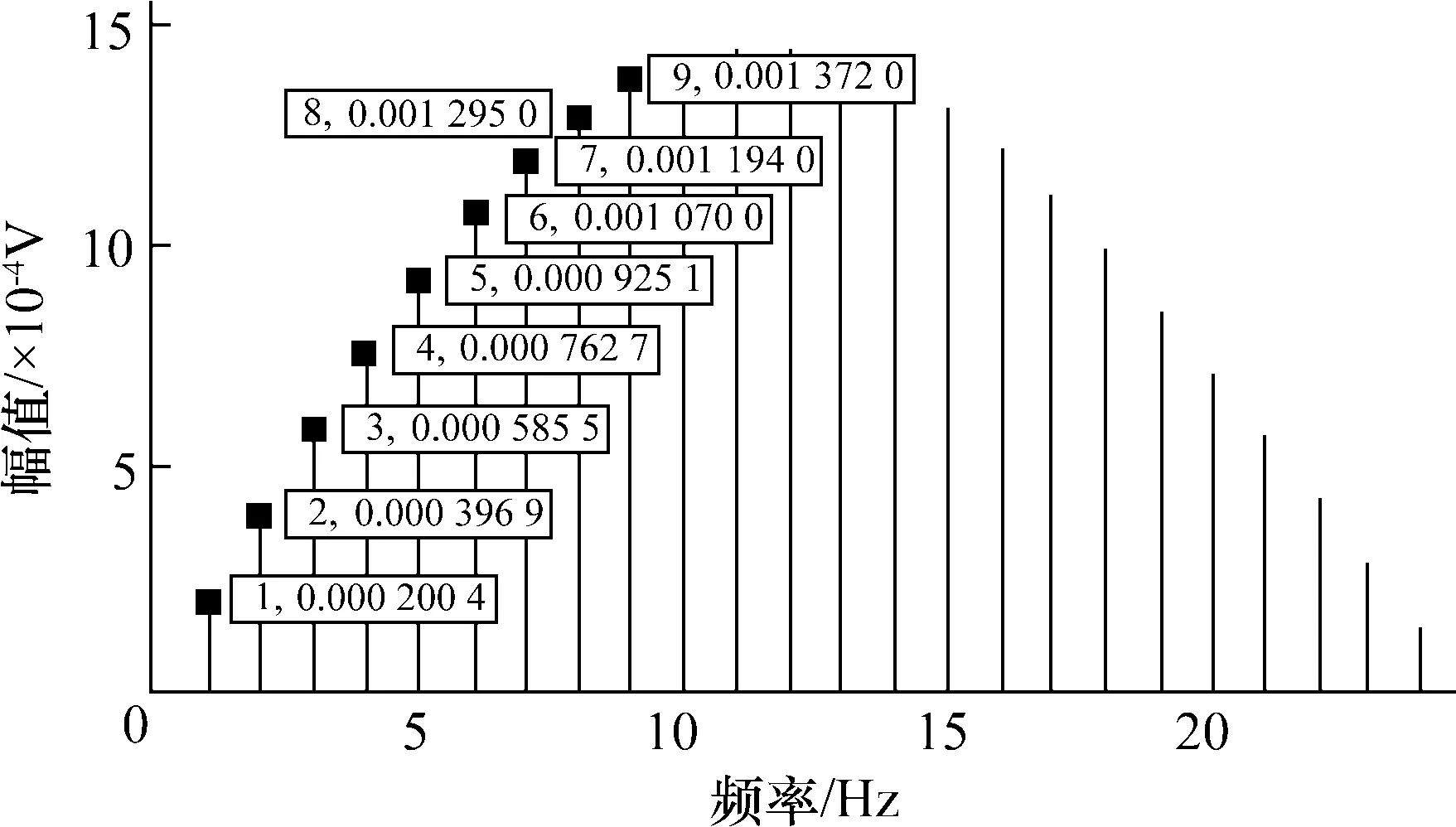
图3 传感器信号的幅值谱Fig.3 Amplitude spectrum of sensor signal
重构滤波的信号处理方法是先对传感器输出信号进行幅值解调,得到重构信号所需要的幅值;再根据得到的幅值将三值波信号重构为矩形波形号;由于重构所得矩形波信号只含有奇次谐波分量,所以可以对重构后的矩形波信号进行梳状带通滤波,抑制噪声,提取出流量信号;最后再对滤波后的信号进行幅值解调,进一步抑制工频噪声和极化噪声,得出流量值。这样将传感器信号重构为矩形波信号后再进行梳状带通滤波,避免了直接采用梳状带通滤波造成的信号偶次谐波分量的衰减,解决了流量准确测量的问题。
先对传感器输出信号进行幅值解调。由图2知,d1~d4分别为对应于D1~D4励磁段的信号后半段的均值,则幅值解调结果为:
(1)
式中:j为传感器输出信号的第j个周期,j≥1;A(j)为信号幅值。通过幅值解调可以削弱传感器输出信号中的极化干扰和工频干扰,但由于信号没有经过滤波,此时幅值解调结果中还有其他干扰分量,所以,需要重构信号进行滤波。而解调幅值时,采用信号段后半段的均值。因此在信号重构时,同样根据传感器信号后半段的均值重构矩形波信号,然后进行梳状带通滤波。
假设重构得到的矩形波信号为r,r(i)和r(i-1)分别为重构信号当前半周期的均值和前一个半周期的均值。由于矩形波信号是根据传感器信号的幅值解调结果进行重构,那么,可令重构得到的矩形波的幅值解调结果与传感器信号的幅值解调结果相同。则可得传感器信号幅值解调结果与重构信号r的关系:
(2)
式中:i为重构后矩形波信号的第i个半周期,i≥2,等式右边为重构信号的两个半周期幅值解调。那么,由式(2)可知第i半周重构后的信号为:
r(i)=2A(i)(-1)i-1+r(i-1)
(3)
图4为重构后的矩形波信号r。此时的流量信号在频域上只有基波和奇次谐波分量,可通过对重构后的信号进行梳状带通滤波处理,以去除流量信号中的干扰。
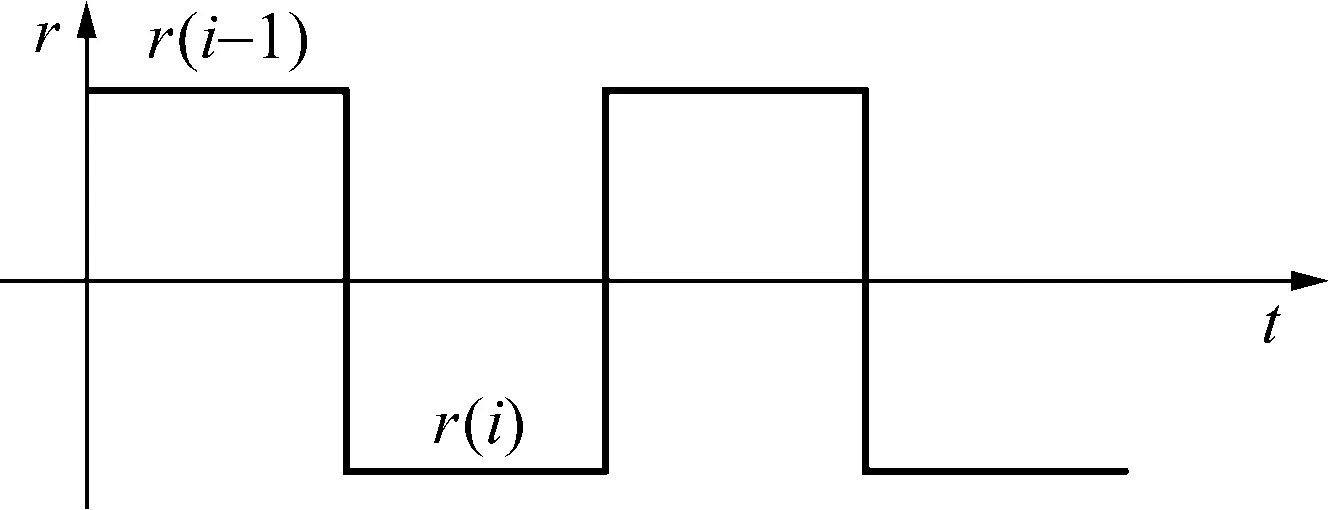
图4 重构后矩形波信号Fig.4 Reconstructed rectangular wave signal
梳状带通滤波器的传递函数为:
(4)
式中:N为滤波器的阶数;a和b为梳状带通滤波器的参数。设输入信号为x(n),经过梳状带通滤波后输出信号为y(n),则梳状带通滤波器就要实现下列差分方程:
y(n)=b×(x(n)-x(n-N))-a×y(n-N)
(5)
根据梳状滤波器传递函数和其对应的差分方程,对重构后的信号进行梳状带通滤波处理,可得:
Alb(i)=b(1)(r(i)-r(i-1))-
a(end)×Alb(i-1)
(6)
式中:i≥2,i表示第i个半周期,Alb(i)为滤波后的信号幅值,b(1)和a(end)为梳状带通滤波的参数,该参数可由Matlab中的iircomb函数得到。那么,在第i-1半周的梳状滤波结果Alb(i-1)已知的情况下,根据第i-1、i半周期的重构信号r(i-1)和r(i),可计算出第i半周的梳状滤波结果Alb(i)。
由式(6)可知,计算第i半周的梳状滤波结果Alb(i)必须要知道前半周期(i-1半周期)的值,所以需要对重构信号r以及其梳状带通滤波结果Alb进行初始化,令r(1)和Alb(1)初始值为:
r(1)=Amp(1),Alb(1)=Amp
(1)
式中Amp(1)可根据式(1)得到,之后,每得到一个新的传感器输出信号幅值解调结果,即可参与到梳状带通滤波中,得到当前半周期的滤波结果。对滤波后的结果再进行幅值解调,可得:
(7)
式中Aend(i)为最终输出信号幅值。经过传感器输出信号的幅值解调、重构信号、梳状带通滤波、再次幅值解调,最终输出去除信号中干扰后的幅值解调结果Aend(i)。
3 低功耗实现
3.1 硬件研制
为实现硬件系统控制的同时进一步降低电磁水表的功耗,选择16位超低功耗、具有精简指令集的混合信号处理器MSP430单片机作为硬件系统的控制核心。研制由MSP430单片机最小系统、电源管理模块、励磁驱动模块、信号采集模块、外部存储模块、人机接口模块和输出模块组成的硬件系统,硬件框图如图5所示。
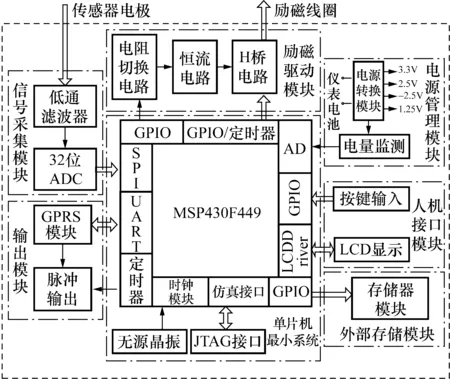
图5 硬件框图Fig.5 Hardware block diagram
MSP430单片机最小系统采用单片机MSP430F449,实现对各个功能模块的控制和信号的处理。电源管理模块由电源转换模块和电量监测电路组成,为变送器提供所需的电源,并通过MSP430单片机的模数转换器(AD)实现对电源进行监测。励磁驱动模块由H桥电路、恒流电路和电阻切换电路组成,用于驱动电磁水表传感器中的励磁线圈;MSP430单片机产生的控制信号通过通用输入输出口(GPIO)控制电阻切换电路,以改变流过励磁线圈中电流的大小,实现极低流量的准确测量。信号采集模块由低通滤波器和32位模数转换器(ADC)组成,用于提取电磁水表的传感器输出信号,并将其转换成数字信号通过串行外设接口(SPI)传给单片机最小系统;低通滤波器是由电阻电容搭建的二阶无源滤波器,用于滤除高频噪声。外部存储模块是铁电存储器模块,用于保存仪表关键数据,具有掉电不会丢失的特点,实现掉电保护。人机接口模块由按键输入和液晶显示器(LCD)显示组成,用于实现人机交互。输出模块包括通用分组无线服务技术(GPRS)模块和脉冲输出模块,其中,GPRS模块通过通用异步收发传输器(UART)与MSP430单片机连接,能实现远程传输数据和实现远程无线抄表;脉冲输出主要用于电磁水表的标定和检定。
由于电磁水表励磁电流小且流量测量下限低,导致小流速测量时传感器输出信号非常微弱,因而前置放大电路带来的干扰会对小流速的测量结果造成影响。所以,采用32位ADC直接采集经过低通滤波后的传感器信号,以避免前置放大电路带来的干扰。同时,利用ADC自身增益将信号放大32倍,充分发挥32位ADC高分辨率的优势。
3.2 软件设计
为了便于系统的设计和维护,软件设计采取了模块化设计方案,将完成特定功能的函数组合成功能模块,然后由主监控程序统一调用,实现电磁水表所要求的各项功能。软件部分主要包括主监控程序模块、初始化模块、励磁控制模块、信号采集模块、算法模块、存储模块、人机接口模块、中断模块、输出模块、通讯模块和看门狗模块。如图6所示。
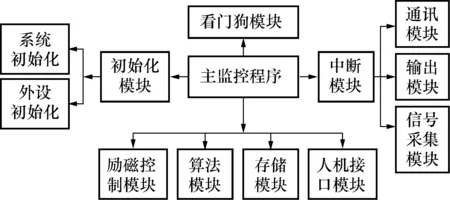
图6 软件框图Fig.6 Software block diagram
主监控流程如图7所示,系统上电后首先进行初始化,初始化完成后启动ADC,ADC开始采样;然后,MSP430单片机通过定时器与2个GPIO口配合产生励磁控制时序和励磁周期,驱动励磁模块开始工作,产生励磁电流,进而传感器产生流量信号。采集了传感器信号后调用算法模块,在算法模块中,先对传感器输出信号进行幅值解调;然后,对解调后的信号进行重构,并对重构后的信号进行梳状带通滤波;最后,再次进行幅值解调,计算得到瞬时流量和累积流量,并实时显示在液晶上。
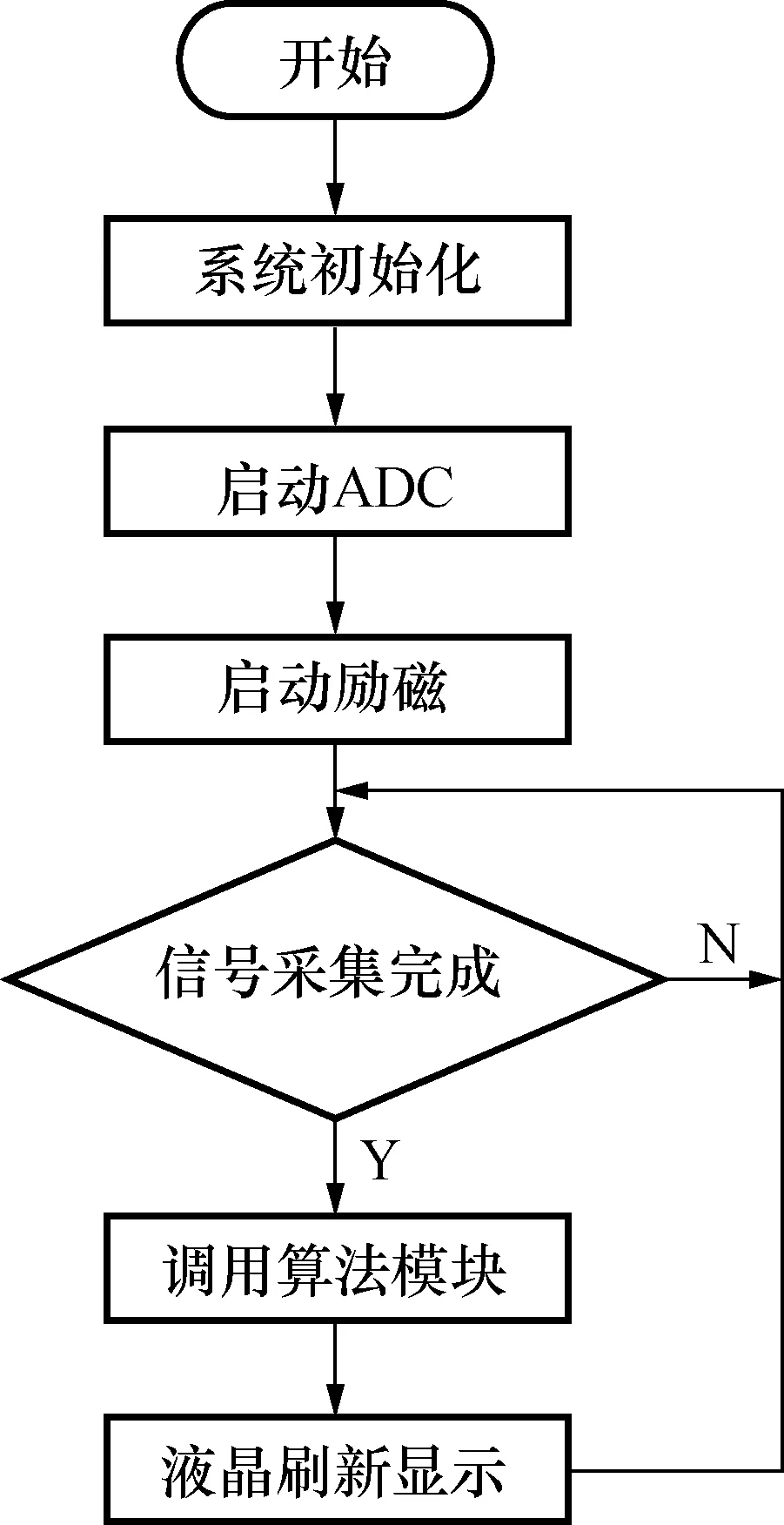
图7 主监控程序流程图Fig.7 Flow chart of main monitor program
由于电磁水表采用间歇励磁的方式,每周期只有三值波段(图1中D1~D4段)存在励磁电流,因此,只有三值波段存在流量信号,其他时段信号均为传感器零点信号。所以,在软件处理中,每周期仅需要采集与励磁电流三值波段对应的传感器输出信号。当该信号采集完成之后,ADC即可停止采样,直到下一个励磁周期的开始,ADC再次开始工作。这种工作方式不仅可以进一步降低功耗,同时也为后续的算法执行和LCD刷新显示节省时间。
4 实验结果
4.1 水流量标定结果
将研制的变送器与重庆川仪自动化股份有限公司生产的口径为100 mm的法兰式传感器相配合,形成一套完整的电磁水表,在重庆川仪自动化股份有限公司静态质量法实验装置上进行水流量标定和检定实验。静态质量法水流量标准装置的扩展不确定度为0.033%。标定实验中,共标定了10个流量点,最大流量为160 m3/h(流速为5.7 m/s),最小流量为0.3 m3/h(流速为10 mm/s),每个流量点分别标定3次。
根据标定得到的实验数据,利用基于示值误差拟合的方法计算得到仪表系数,其中,示值误差拟合的公式为[13]:
式中:xi为被检表流速;yi为标准流速。
将仪表系数设置到电磁水表的变送器中,再次利用质量法进行水流量检定实验,以验证电磁水表的准确度。水流量检定实验中,共检定了5个流量点。其中,最小流量约为0.4 m3/h(流速约为14 mm/s),最大流量约为160 m3/h(流速约为5.6 m/s)(这里将质量单位通过水密度ρ换算到了体积单位)。检定实验结果如表1所示。
从表1中的水流量检定实验结果可知,流量为0.4 m3/h时,即最小流量时相对平均误差最大,为-1.771%,而其它流量的相对误差均在±1%以内。
4.2 技术指标比较
根据国际法制计量组织(OIML)的国际建议OMIL R49:2006(E),水表的流量范围可由Q1(最小流量)、Q2(分界流量)、Q3(常用流量)、Q4(最大流量)来表述,量程比由R值(Q3/Q1)来反映。电磁水表按照准确度等级划分为1级和2级,其中,1级水表的最大允许误差在高区(Q2~Q4)为±1%,在低区(Q1~Q2)为±3%;2级水表的最大允许误差在高区(Q2~Q4)为±2%,在低区(Q1~Q2)为±5%。由表1的水流量检定结果可见,基于间歇励磁和重构滤波的电磁水表满足1级水表的精度要求,且在满足1级水表精度的同时量程比为400。
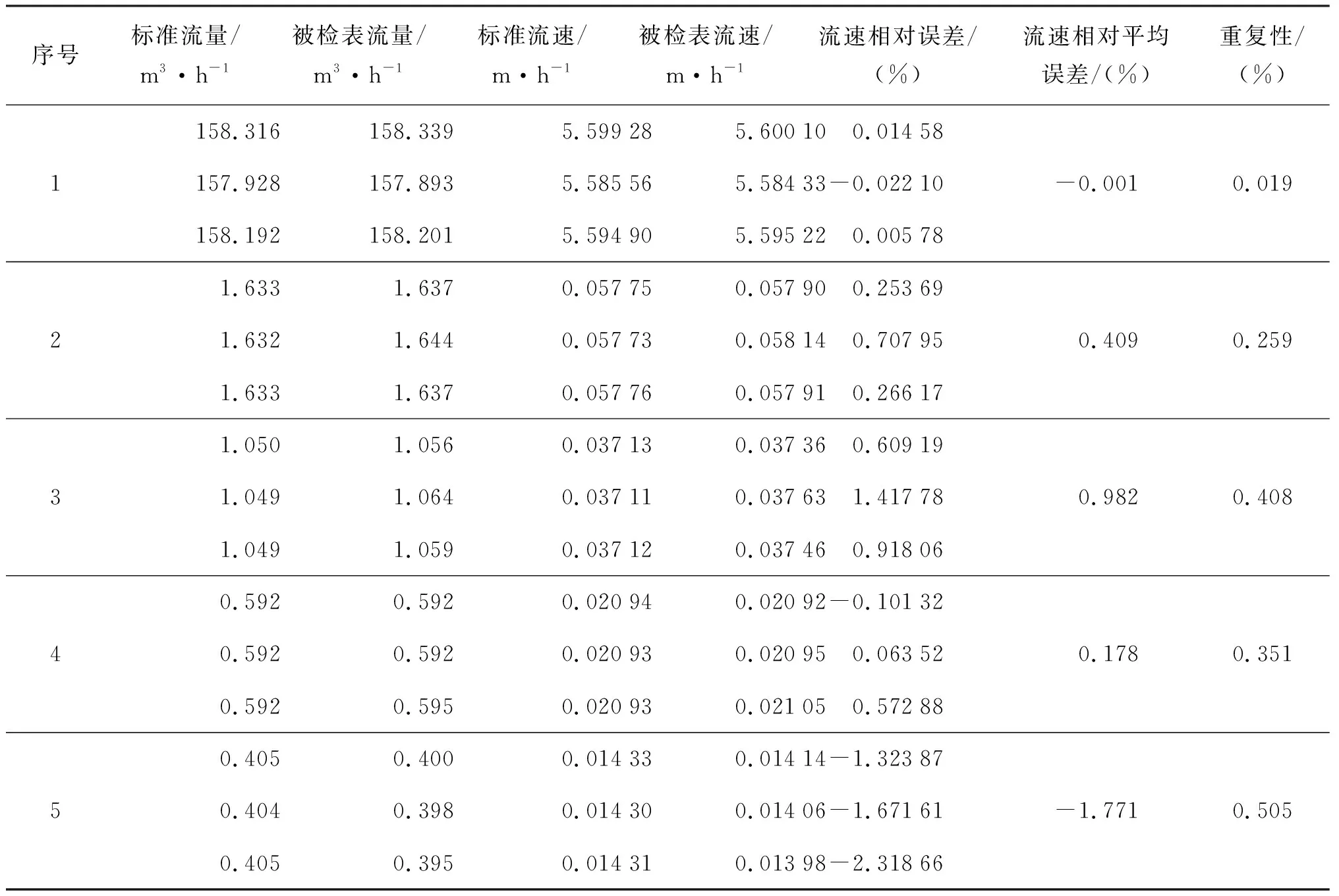
表1 口径为100 mm的传感器检定实验结果Tab.1 Test results of sensor with a diameter of 100 mm
根据德国科隆公司(简称科隆)的技术手册[14],以口径为100 mm的电磁水表的技术指标为例:其电磁水表在满足1级水表的精度要求时,最小测量流量Q1为1 m3/h,常用测量流量Q3为250 m3/h,量程比为250;在满足2级水表的精度要求时,最小测量流量Q1为0.4 m3/h,常用测量流量Q3为160 m3/h,量程比为400。根据德国西门子股份公司(简称西门子)的技术手册[15],同样以100口径电磁水表的技术指标为例:其电磁水表在满足1级水表的精度要求时,最小测量流量Q1为1 m3/h,常用测量流量Q3为250 m3/h,量程比为250;在满足2级水表的精度要求时,最小测量流量Q1为0.63 m3/h,常用测量流量Q3为250,量程比为400。
与科隆和西门子电磁水表的相应技术指标比较可知,基于间歇励磁和重构滤波的电磁水表在同样满足1级水表的精度要求时,最小测量流量Q1为0.4 m3/h,即本文研制的电磁水表的流量测量下限明显更低,比科隆和西门子1级电磁水表的流量测量下限低60%,与科隆电磁水表2级精度要求的流量下限相同。而且,本文研制的电磁水表作为1级水表时量程比达到400,比科隆和西门子1级电磁水表的量程比高60%,与科隆和西门子2级水表的量程比相同。即在相同的精度要求下,本文研制的电磁水表流量测量下限和量程比均优科隆和西门子的产品的指标。
5 结 论
针对电磁水表需要电池供电,要求功耗低以及其励磁电流小、流量下限低导致的传感器信号幅值微弱、小流量测量不稳定的问题,设计了每周期一次三值波的间歇励磁方式,极大降低了励磁功耗,并且还可通过降低励磁频率来减小励磁功耗;提出了重构滤波处理方法,先幅值解调,然后将三值波信号重构为矩形波信号,以进行梳状带通滤波,最后再次幅值解调,有效地滤除了信号中的干扰,保证了小流速的准确、稳定测量。基于MSP430研制了电磁水表变送器硬件和软件,配合100 mm口径的传感器进行了水流量标定和检定实验。
实验结果表明,基于间歇励磁和重构滤波的电磁水表在最小流量的时候相对误差为-1.771%,在±3%以内,其余流量的相对误差均在±1%以内,即在满足1级水表的测量精度要求时,流量测量下限可达0.4 m3/h,量程比可达400。
将基于间歇励磁和重构滤波的电磁水表与国外先进产品做了技术指标对比。对比结果表明,在同样满足1级水表的精度时,本文电磁水表的流量测量下限和量程比均明显优于科隆和西门子的电磁水表。
致谢:感谢重庆川仪自动化股份有限公司提供电磁水表传感器和实验条件。
猜你喜欢
河北电力技术(2021年2期)2021-07-29 09:16:30
声学与电子工程(2021年2期)2021-07-26 05:54:04
供水技术(2020年6期)2020-03-17 08:18:34
E动时尚·科学工程技术(2019年9期)2019-09-10 12:39:29
发明与创新·中学生(2018年9期)2018-10-15 09:14:48
电子制作(2018年1期)2018-04-04 01:48:34
大电机技术(2017年3期)2017-06-05 09:36:02
电子制作(2017年1期)2017-05-17 03:54:07
电测与仪表(2016年15期)2016-04-12 00:30:54
燕山大学学报(2015年4期)2015-12-25 02:19:55