
极区航海导航与定位保障技术发展综述
2021-10-27 08:59:00程建华刘佳鑫赵琳
中国舰船研究 2021年5期
程建华,刘佳鑫,赵琳
哈尔滨工程大学 智能科学与工程学院,黑龙江 哈尔滨 150001
0 引 言
近年来,全球气候变暖,极区冰盖融化加速,国内外专家预测北极最早于2030 年可出现季节性无冰现象[1]。在经济全球化、区域一体化发展趋势下,极区在战略、经济、科研、环保、航道、资源等方面的价值不断提升,受到国际社会的普遍关注。例如,北极作为连接东北亚、欧洲、美洲三大经济圈最短的海上航道,可使穿越北极东北航道或西北航道的船舶,比绕行苏伊士运河或巴拿马运河航线至少节省40%的航程[2];极区资源丰富,原油储量、天然气储量分别占全球总储量的13%和30%[3]。作为世界贸易大国和能源消费大国,极区航道和资源开发利用可能对我国能源战略和经济发展产生巨大影响。因此,经略极地、建设极地,发展“冰上丝绸之路”,成为了国家极地战略的直接体现。
受到极区未知浪涌、海冰、低温、低云、浓雾、冻烟、暴雪等极端海洋环境的影响,各类海洋运载器要实现极区顺利到达、极区安全航行或作业,必须依赖高精度导航和定位信息支持,这使得导航和定位系统成为极区航道和资源开发的先决保障条件。然而,长期适用于中低纬区域应用的各类导航定位装备,在面临南北极区的特殊环境时,又会产生导航定位性能下降甚至无法工作的问题;同时,由于没有北极八国的天然地理位置优势,南北极区与我国本土相距较远,又对导航和定位系统在长航时工作能力方面提出了更高要求。因此,必须通过研究导航和定位系统新机理、新方法,以及技术适应性改进,才能满足海洋运载器极区导航定位的要求。
要实现极区长航时、高精度、高可靠性导航定位,必须从机理研究出发,系统性分析影响极区导航与定位装备性能的核心要素,进而通过有针对性的探索和改进,才能满足应用需求。因此,本文将提出一种新的极区环境要素分类方法,分析这些要素对导航系统的影响,并系统性地总结概括极区导航系统的发展历史、研究现状及未来发展,对各类极区主要船用导航系统的技术发展进行综述,以期为后续开展更为深入的研究提供借鉴和参考。
1 极区导航的发展历史及现状
人类对极地探索有着悠久的历史,从大航海时代到19 世纪末,西方各国众多航海家出于商业目的,试图通过取道北冰洋开辟一条前往东方的捷径。20 世纪初期,现代科学考察活动开始逐渐投入到极区探索中。自此,天文导航、惯性导航、卫星导航、声学导航、电子海图等主要导航装备,通过不断搭载、应用和改进,逐渐满足在南北极区的各种军事和科学考察需要。
由于极区缺少合适的方向基准,因此限制了早期极区的活动范围,造成极区探索存在诸多危险。主要原因是地球作为一旋转椭圆体,在地理南北极存在极区北向变化快、南北极点北向缺失的问题。例如,俄国海军于1914 年第一次驾驶飞机前往高纬度地区是目前可追溯搭载导航设备前往高纬度地区的最早记载[4],但极区缺少合适的方向基准,极大地限制了飞机在北极的航行范围。1941 年,Maclure 等[5-6]提出了格网导航的概念(图1),其以陀螺仪作为提供方向信息的设备,并在1945 年“白羊座Ⅰ”号飞往北极点的飞行任务中得到应用[7]。横向力学编排以赤道上某点作为导航极点,建立横向地球模型,以沿横向地球模型经线方向的横向北向代替地理北向,配合横向墨卡托投影的极地航图,解决了极区航行航向选择难题[8],美国的“鹦鹉螺”号核潜艇在1958 年驶入极区时,其装备的惯性导航系统便采用该种力学编排方案[9]。
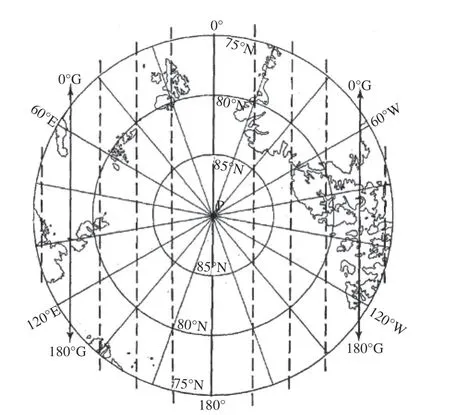
图1 格网北向示意图Fig. 1 Schematic diagram of grid north
通过极区科考活动的牵引,人类对极区认知不断加深,越来越多的极区导航装备逐渐完成极区搭载航行试验并获得应用。例如,俄国科学家在1914 年首飞高纬度区后的一二十年间,进行了大量的极区飞行试验[10-11],虽然由于保密原因,无法得知俄国极区导航领域取得的进展,但由Harold Gatty 翻译相关俄文文献得到的Gatty Report 为美国学习和研究高纬度地区导航立下了极大功劳[12]。1931 年,美国“鹦鹉螺”号潜艇首次探索北冰洋,航行过程中借助六分仪、天文钟、陀螺罗经和计程仪等设备,以天文定位与推算航法相结合的方式,指引潜艇前往极区,并在陀螺罗经失去寻北能力(潜艇到达 82°N以北时)时,切换至方位仪模式,借助太阳舰位校正航向和推算位置[13]。
从1957 年国际地球物理年开始,北极科学活动大量增加,美国在极区的科研活动也逐渐增多,标志着单纯以探险为目的的极地征服时代已经结束,以科学考察为目标的极地开发时期正式开始。在此时期,自动化设备在极区导航领域的应用频率得到大幅提升,惯性导航系统作为导航自动化的主要代表之一,参与了美国1958 年“鹦鹉螺”号核动力潜艇的极区探索之旅。“鹦鹉螺”号搭载以横坐标系为导航坐标系的N6A 型惯性导航系统成功穿越极点[9],充分证明了惯性导航系统在极区导航方面蕴含的巨大潜力。作为在美国及北约水下潜艇大规模装备应用的MK49 型旋转调制惯性导航系统,也具备极区工作模式[14],霍尼韦尔公司的MAPS 惯性导航设备亦被加拿大用于 84°N区域的导航工作。
卫星导航的极区应用始于1970 年,美国“槌头双髻鲨”核潜艇在极区航行时便装备了导航卫星(Navsat)接收机[9],用于获取舰位信息,其误差圆的不确定度为0.2 n mile,俄罗斯研制的基于卫星导航测向的三天线卫星导航罗经MRK-11(图2),工作区域可延伸至南北极点[15],但卫星导航易受到极区电磁环境因素的干扰,出现无法观测的情况。

图2 俄罗斯MRK-11 卫导罗经Fig. 2 Satellite compass MRK-11
通过观测恒星等天体获得导航信息的天文导航,作为一种经典导航手段,在极区有着悠久的应用历史。美国海军“红鱼”号潜艇、“鹦鹉螺”号核潜艇在北极探索科考活动中,均通过六分仪等天文观测,为惯性导航系统提供导航校准信息,尤其是1970 年,美国“槌头双髻鲨”核潜艇在极区航行中出现惯性导航、卫星导航失效的情况,通过Ⅲ型潜望镜六分仪,在接近 87°N的区域,通过连续观测实现了潜艇定位精度优于3 n mile。
声学导航设备极区的应用,始于1947 年美国海军“帆鳍鱼”号潜艇的声呐导航设备[9],此后,美国为舰队级潜艇在极区的航行工作开发了声呐导航系统,俄罗斯也通过在极区布放水下、水面和冰面浮标,进行声学导航定位。有统计数据表明,美国潜艇自1976~2000 年间,通过上视声呐设备,在极区冰下通航、穿越极点达36 次(图3)。

图3 美国海军潜艇冰下航线图(1976—2000 年)Fig. 3 US Navy submarine route map under ice
除惯性导航、卫星导航等位置、速度、姿态传感系统外,海洋运载器还需要航海图等航行作业保障设备,实现航路规划、航线设计等航海作业功能。1941 年英国Maclure 中校除提出格网导航概念外,亦提出了与格网导航相匹配的导航图所应满足的条件[5]。此后10 年间,Hagger[16],Moore[17]和Beresford[18]等先后对极区导航图所需满足的条件进行阐述,并比较了日晷投影、极球面投影、横向墨卡托投影等投影图间的优劣,指出极球面投影最有优势,且是英国极区航海图所用的投影方式。1971 年,Dyeer[8]提出了基于横向墨卡托投影的极区横向导航技术,将横向地理坐标系与横向墨卡托投影相结合来实现极区导航。
目前,美、俄等国在极区船用导航领域已拥有相对成熟的方案。2018 年10 月,美国“杜鲁门”号航母取道北极前往挪威参加演习,表明美国在极区船用导航领域已从理论研究转入实际应用。而俄罗斯在2019 年开展北极圈内的两栖作战演习,并展现出了极为丰富的极区作战经验,也从侧面说明国外在极区航海导航与定位保障技术方面,已达到一定的成熟水平。
2 极区环境要素对导航装备的影响
地理南北极由于其位置的特殊性,存在诸多与中低纬区不同的特征,包括环境、信号(电磁波、光波、声波)等。因此,需要建立一套较为完善的分析体系,囊括所有极区的特殊环境,并能清晰全面地分析其对导航系统极区性能的影响。
从地球运动学、地球物理场、气象水文、地理位置等环境要素角度进行分类,分析比对极区与中低纬区的环境差异,能够更加清晰、简洁、全面阐述极区环境的特殊性,及其对导航系统性能的影响,如表1 所示。
由表1 可知,极区特殊的地球运动学环境、地球物理场环境、气象水文环境和地理位置环境,对惯性导航、卫星导航、天文导航、声学导航、地球物理场导航、磁罗经和海图等主要导航系统,均产生了不同程度的影响,主要表现在:
1) 惯性导航系统由于具有自主性、隐蔽性和信息完备性等特点,在极区环境下相较其他导航系统仍具有独特优势。但基于传统力学编排的惯性导航系统的极区应用,存在的首要问题是航向误差随纬度升高急剧增大。以力学指北编排为例,去除震荡项的航向稳态误差 γs的表达式为

表1 极区环境与中低纬度环境差异对比Table 1 Polar environment and its differences between medium and low latitude environment

式中: ωie为 地球自转角速度;φ为 纬度; εx为等效东向陀螺漂移。可以看出,航向误差在纬度趋近90°时,趋于无穷大。
其次,惯性导航系统初始对准能力受重力矢量和地球旋转矢量叉乘项制约,随着纬度升高,重力矢量和地球旋转矢量趋于同向(图4),北向与方位回路间的耦合效应减弱,最终在南北极点耦合效应消失。

图4 g 与ωie 趋于同向Fig. 4 g and ωie tends in the same direction
最后,极区重力数据缺失,导致在重力异常区域内需重力参与解算的惯性导航系统误差增大。
2) 卫星导航在极区应用受限于卫星信号的质量,主要影响因素由3 部分构成[19]。首先,虽然极区可视卫星数目比中低纬度地区多,但多数卫星高度角较低,导致多径效应明显,对流层延迟影响增强,使得卫星导航定位信号质量较差;其次,由于磁暴和太阳耀斑周期性发生,总电子含量TEC日间波动剧烈,降低了卫星导航系统精度及连续性;最后,极区恶劣的自然环境亦会增加地基增强系统的建设难度,导致极区卫星导航定位精度难以提升。
3) 天文导航性能受水平基准、可观测天体个数、天体高度角等因素制约[20-23]。在极区天文导航的应用受到严重限制,具体包括低云、雾、冻烟、雪等特殊气象,会降低能见度,使得水天线难以辨识,海冰覆盖于海面,亦会干扰水天线的观测,此外,极夜期间大部分时段缺乏光照,除满月或极光时段外,水天线不可见,在此情况下,若无人工水平基准或射电天文观测及惯性平台等设备提供辅助,将导致天文定位无法进行;另外,极昼期间大部分时段内仅太阳一个天体可供定位,在民用晨光昏影时段(可连续数天甚至数周出现),甚至无任何星体可供定位;同时,极区天象环境亦与中低纬度存在差异,以北极点附近为例,该区域内所有天体均环绕天北极做近似水平的周日视运动,可供观测星体高度相对固定,其中天文导航中常用的北极星位于天顶点附近,高度角接近90°,失去定位导航价值,而太阳、月亮和航用行星则在大多数情况下出现天体高度角低于10°的情况,亦会导致天文导航无法实现。
4) 声学导航包含声学定位、测速、测深、测潜等类型,其中声学定位系统需要前期在海底布放声学基阵。在极区应用时,虽然声学导航工作原理不存在特殊性,但主要受极区冰层分布及特有水声信道特性的影响。首先,由于冰层覆盖,加之距我国本土较远,声学信标布放难度较大,难以为声学定位系统提供支持;另外,海冰作为弹性介质,对声波具有投射作用,海冰−海水粗糙界面对声波具有散射作用,也会导致海水中声能量的损失[24];此外,极区特殊的半波导声道与100~200 m 深度间形成的新的稳定声信道的存在,影响着声学信号频段的选择;同时,冰层融化、分裂、移动、碰撞导致冰下噪声剧烈起伏[25],从而影响声学导航系统的性能。
5) 地球物理场导航主要包括重力匹配、地磁匹配、地形匹配这3 种导航系统[26],其应用的前提是事先获取海洋运载器经过区域的地球物理特征分布。由于极区高精度重力模型、地磁模型和地形数据缺失,目前在极区内尚无法使用。此外,由于地磁极点移动速度相对较快,目前世界地磁模型仅应用4 年后便需要更新,靠近磁极附近的地磁数据变化较为明显,在近地磁极点区域无法通过地磁匹配的方式进行导航。
6) 磁罗经在极区会受到多种因素的干扰,影响其指向能力。具体包括:磁极位于极区内,其附近地磁水平分力几乎为0,使得磁罗经在南北磁极附近失效;极区磁暴多发,亦会扰动极区地磁场,影响磁罗经的指向;地理极点与地磁极点不重合,磁北与真北间存在磁差,且纬度越高误差越大,例如白令海峡附近磁差可达10°,超出了指向误差的允许范围,需要通过修正才可以在极区大部分区域使用[27];由于磁极的运动[28],磁差变化不规则,磁极附近磁差日变化量最高可达10°,亦会影响磁罗经的指向能力(图5)。

图5 地磁北极位置变化图[28]Fig. 5 Map of the position of the magnetic north pole[28]
7) 海图极区应用的问题集中在海图投影方式及海图数据两方面。就海图投影方式而言,中低纬度地区常用的墨卡托投影海图在极区存在角度变形、长度变形和面积变形过大的问题,不适合在极区使用;就海图数据而言,极区大部分区域未经系统性测量,且海图绘制多由空中照片制作而成,水文等航海数据匮乏,严重影响海图的可信度。
此外,极区冰层覆盖范围较广,北极冰层一般处于水下30 m 以上的区域,南极冰层最深可达水下400~500 m,严重威胁潜器等水下海洋运载器的航行安全。故需研究新型声学测冰设备,获取潜器周围冰层距离及厚度等信息,以保障潜器的水下航行安全。
因此,极区特殊环境影响了惯性导航、卫星导航等主要导航系统的性能,需对各导航系统算法、硬件等方面加以改进,以满足舰船、潜器等水面、水下海洋运载器极区导航的不同需求。
3 极区主要导航系统技术现状
随着极区导航技术的进一步发展,逐渐形成以惯性导航为核心导航设备,其余各导航系统辅助的综合导航系统。考虑到磁罗经在近地磁极点区域无法使用,极区地球物理场导航观测数据库难以构建,因此主要阐述惯性导航、卫星导航、天文导航、声学导航以及海图等主要极区导航装备的相关研究现状。
3.1 极区惯性导航
结合极区环境对惯性导航系统影响的分析结果可知,以当地地理坐标系为导航坐标系的捷联惯性导航系统在极区无法正常工作。
而以地心地固坐标系(ECEF)或惯性坐标系为导航坐标系的惯性导航机械编排方案具备极区导航能力,但输出的导航参数物理意义不明确,且非水平导航坐标系的机械编排方案存在不稳定因素,亦无法胜任远距离长航时的导航工作[9,29-30]。
在计算机有效字长限制计算性能的平台惯性导航时代,为克服高纬度地区经线收敛引起的误差放大问题,游移方位惯性导航机械编排在极区导航领域得到应用,如早期的LN-51 航空惯性导航系统[31]。游移方位惯性导航系统通过引入位置方向余弦矩阵来跟踪地球自转,可有效解决计算溢出的难题,但在高纬度地区,从位置方向余弦矩阵提取位置信息存在奇异值,游移角同经度相关无法分离,且游移角的计算误差随纬度升高而增加甚至溢出,因此游移方位惯性导航机械编排方案在高纬度地区可正常工作,但无法完成定向和定位任务[32]。
在计算机性能强大的捷联惯性导航时代,以游移坐标系为导航坐标系的捷联惯性导航力学编排被应用于极区导航,其中,横向力学编排与格网力学编排因提供导航信息更为全面,成为适用极区自主导航的两大力学编排方案分支。
格网惯性导航系统力学编排以与本初子午线平行的格网北向为航向基准,代替地理北向,解决了极区航行航向选择难题[33]。Ignagni[34]在格网坐标框架下,对地球进行圆球建模,提出了格网惯性导航机械编排方案,输出格网航向及地心地固坐标系下的位置信息,避免纬度升高经线收敛造成的定向定位参考难题。后续,周琪等[35-36]在此基础上推导了基于地球椭球体模型的格网惯性导航机械编排,并仿真分析了相关误差,消除了Ignagni 所提方法中机械编排的原理性误差,进一步提升了导航精度,可以与极球面海图、极地立体投影航图等相匹配,满足极区航海需求。但其机械编排中经度信息仍参与更新格网角、位置矩阵等重要导航参数的运算,在近极点地区此机械编排存在误差放大的问题,因此赵琳等[37]在此基础上提出了去经度的格网机械编排方案,彻底消除近极点地区经度误差放大对导航性能的影响。
横向惯性导航系统力学编排的研究首先是基于地球圆球模型,以赤道上某点作为导航极点,通过旋转地球经纬度建模方式,建立横向地球模型,以沿横向地球模型经线方向的横向北向代替地理北向,以此为基础设计惯性导航算法。这种算法初步解决了极区难以寻北的问题,但其力学编排建立在地球圆球模型的基础上[38],存在原理性误差。因此,出现了基于地球椭球体模型的横向坐标系力学编排[39-41]。
但目前椭球体模型中出现了2 种横向经纬度的定义。第1 种依据经纬圈定义横向经纬圈,进而得到横向经纬度的定义。即以横向地轴Z′所在平面切地球表面所得曲线为横向子午圈,过地理极点的横向子午圈为横向本初子午圈,以垂直于横向地轴的平面交地球表面所得的曲线为横向纬线圈,如图6 所示[39-40]。其中,横向经度 λ1为横向本初子午面与载体所处横向子午面间的二面角,横向纬度L1为 横向子午圈上P点处切线的法线PB与横向赤道平面间的夹角。第2 种以地理垂线与各面间夹角来定义横向经纬度,如图7 所示[41]。横向纬度L2为 椭球体上P点的法线PQ与横向赤道平面的夹角,横向经度 λ2为PQ在横向赤道平面的投影MQ与X′轴的夹角,横向经、纬度相同的点的连线构成横向子午圈与横向纬线圈。

图6 传统经纬圈定义方式Fig. 6 Traditional latitude and longitude circle definition
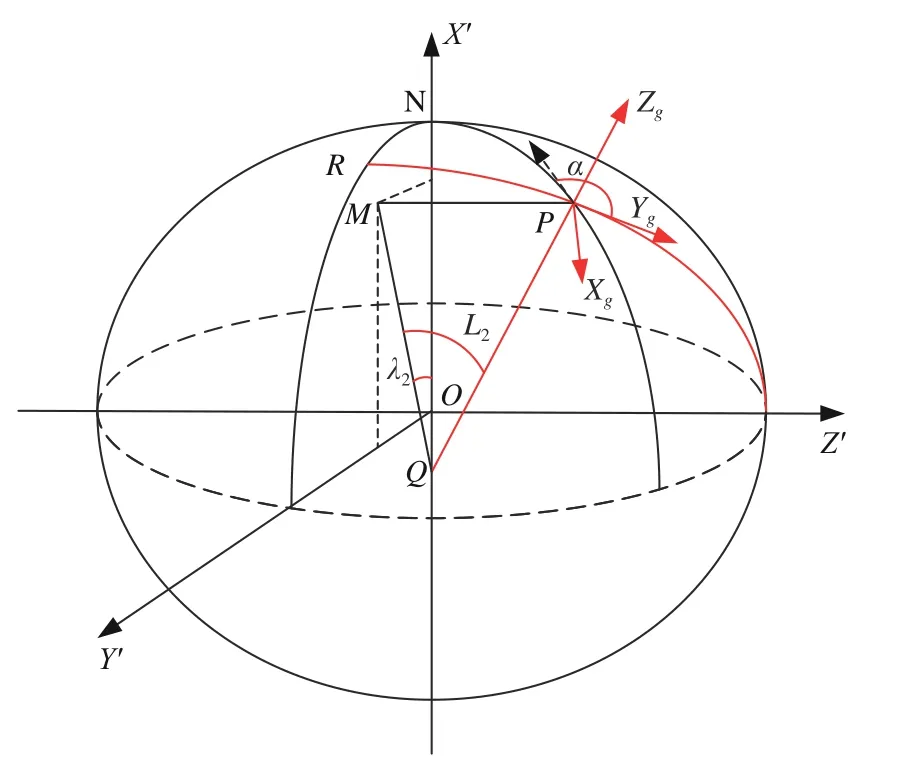
图7 垂线经纬度定义方式Fig. 7 Vertical latitude and longitude definition
第1 种定义方式建立的横向地理坐标系,其天向Zg与P点法线间存在小角度,即该坐标系不是当地水平坐标系。若将此横向地理坐标系作为导航坐标系,显然沿Zg方向的速度积分无法代表高度的增长,该定义下的力学编排存在较大的原理性误差,并不稳定;而第2 种定义方式建立的横向地理坐标系不存在上述问题,因而后续研究多基于此开展。
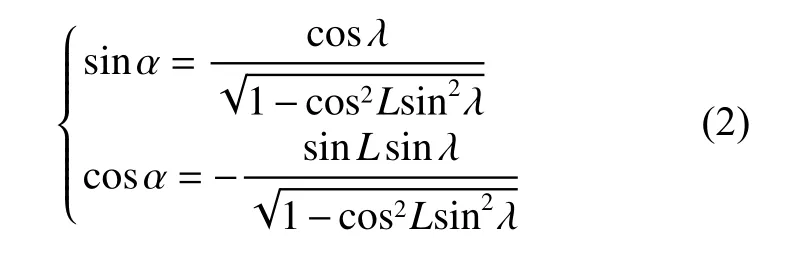
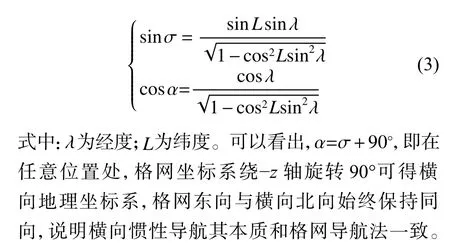
第2 种定义方案其本质与格网导航法一致,以文献[39] 与[41] 中横向惯性导航力学编排与格网惯性导航力学编排为例,其中横向角 α与格网角 σ的公式为:
圆球模型引起的几何误差随惯性导航运行时间发散,而椭球体模型则不会导致这一问题[42],因此该方法有效提升了导航精度,但基于椭球体模型的横向坐标系力学编排需对地球进行二次建模,导航参数更新算法较为复杂,且与其他导航设备之间存在地球模型兼容性问题,增加了多源导航信息融合的负担。针对这一问题,出现了基于虚拟圆球的横向力学编排[43],这种方案简化了椭球模型方法的复杂编排,但其实质是在横向惯性导航力学编排中,将卯酉圈、子午圈半径代替横向卯酉圈及子午圈半径,从而简便计算,但仍不可避免地引入原理性误差。
除格网惯性导航与横向惯性导航两大力学编排方案外,近年来还出现了基于地球坐标系的法向量惯性导航力学编排方案[44]、基于伪地球坐标系的全球导航方案[45]和基于极球面网格航向基准模型的惯性导航方案[46],为全球(含极区)导航提供了新的思路。其中,法向量导航方案可适用于全球范围,具有良好的应用前景;而伪地球坐标系惯性导航力学编排其实质是对地球模型的重构,将初始时刻的当前位置重构为伪地球模型中伪赤道上的某点,以此保障惯性导航长时间工作于中低伪纬度区域,即长时间保持导航坐标系不变。但该方法建立在地球圆球模型的基础上,存在较大的原理性误差,而基于椭球体模型的伪地球坐标系导航又存在伪卯酉圈半径运算复杂,导航参数转换较为复杂的问题;格网航向基准与极球面格网航向基准虽然定义方式不同,但其本质相同,故极球面格网导航与格网惯性导航机理相近,解算过程略有差异。
3.2 极区卫星导航
全球主要的四大卫星导航系统分别是美国GPS、俄罗斯GLONASS、欧洲Galileo 和中国北斗卫星导航系统(BDS),目前均已建成或完成改造。由于北斗三号系统在近期组网完成,国内对北斗系统及其他卫星导航系统的极区定位性能分析较多。鄂栋臣等[47]研究表明,GPS 和GLONASS接收机在极区可使用。于清德等[48]通过仿真实验分析了高纬度地区GPS,GLONASS 和Galileo 的几何性能,结果表明GLONASS 在极区拥有最好的几何性能。刘志平等[49]借助各卫星导航系统的星历数据,分析了GPS,GLONASS 和BDS 可见性及可用性的概率分布特征,结果显示GPS 可见卫星数最高,GPS 和GLONASS 更适用于极区环境。杨元喜等[19]分析了北斗当前星座及北斗三号系统全球星座在极区的可用性,结果显示,现有星座下,北斗系统暂时不具备导航定位及授时能力,在北斗三号建设完成后,可独立为极区提供导航定位能力,但仍存在一些问题需要解决。焦博等[50]借助“雪龙”号科考实测数据,分析了北斗系统在南极地区的导航服务性能,结果表明,北斗在90%以上时段可提供20 m 以内精度的导航信息,满足基本导航需求。徐炜等[51]通过仿真计算评估了BD,BD2 和GPS 及其组合系统在极区内的定位性能,BD2 覆盖性能低于GPS,GPS/BDS组合精度更优。倪煜淮等[52]通过仿真分析了北斗三号系统与GPS 的定位性能,结果显示北斗系统定位性能均优于GPS,但稳定性稍弱于GPS。陈闯等[53]借助全星座仿真数据,分析了GPS,BDS及二者组合系统在南极中山站附近的定位效果,结果显示,BDS 定位能力优于GPS,二者组合后可明显提升极区的导航定位性能。
此外,国内学者亦对极区卫星数据质量、卫星导航定位技术及其误差特性开展了研究。姚翔等[54]提出了BDS 与GPS 极区精密定位技术(PPP),结果表明该方法可行但部分区域仍无法定位,组合系统比单系统性能更好。左宗等[55]借助极区北斗实测数据,全面分析了北斗系统在极区的数据质量特征,结果表明观测数据质量受高度角影响大,信噪比整体水平较低,与GPS 相当,多路径效应严重,观测数据受电离层活动影响大且存在时段差异;同年,又分析了极区卫星导航精密单点定位误差特性,表明季节变化对卫星导航多路径误差的影响可达1~3 cm,对流层天顶总延迟精度在10 mm 以内,可满足极地对流层反演等应用的要求,电离层扰动对卫星导航定位性能影响较大[56]。
3.3 极区天文导航
国内外极区天文导航领域文献相对较少。国外文献多集中于上世纪50 年代前后。1949 年,Sadler[57]设计了极区天文导航表,并给出了永久恒星表样本;同年,Zaccheo[58]对极区飞行过程中天文导航面临的问题进行了详细描述;1952 年,Collins[59]研究了北极圈内利用大圆位置线进行天文导航的方法,并分析了该方法的优点。国内极区天文导航领域的研究可追溯至20 世纪80 年代末,郭洪贵等[20]介绍了极区天文观测的特点及航行天文定位方法,并指出由于恒星可观测时间的限制,此方法在极区可用时间较短;郭德印等[21]介绍了高纬度地区天文导航观测的特点;唐正平等[22]研究了极区舰船天文定位误差修正和换算方法,提高了极区天文定位解算精度;芮震峰等[23]详细分析了极区特殊航行环境及其对天文导航的影响,探讨了极区航行中天文导航面临的问题,并给出了相应解决对策,但其可用性仍需进一步检验和完善。然而,由于近年来天文导航研究多集中于深空探测领域[60],极区关注度较低,暂时没有关于极区天文导航相应解决对策的深入研究。
3.4 极区声学导航
极区声学信道特性的研究是开展极区声学导航适应性改进的基础,通过研究极区水声传播特性,掌握信道分布和频率响应特征,即可选取适合通信和导航的深度和频率,提升声学信号的传播距离,推动超远程声学导航发展;通过对北极地区水声冰面散射特性研究,分析并了解多途结构和频率响应特征,可提升冰下中近程声学导航性能;通过对环境噪声特性及冰−水界面的声反射和散射特性研究,建立北极环境噪声预测模型和水声传播损失模型,可减少噪声干扰对声学导航的影响,最终实现对极区声学导航的适应性改进[24, 61-62]。
2000 年以后,由于气候变暖,不仅影响海冰分布,同时也改变了冰下水体结构,使极区声学规律发生改变。因此,以美欧为首的各国纷纷开展了相应的北极声学研究项目及计划。2008 年,欧盟各国开展了名为ACOBAR 的北冰洋中部观测项目,目前已进行了2 期,意在发展一个集声层析、水下平台数据传输、冰基漂流浮标和滑翔机通信与导航为一体的北冰洋中部海洋环境监测和预报系统。美国于2015 年开展了加拿大海盆地声传播试验CANAPE 等相应的研究计划,以期确定“新”北极海域冰−海作用下的水声及声呐信号处理的新模式及新参数,目前在冰下导航领域已取得一定进展。2014 年,美国伍兹霍尔海洋学研究所(WHOI)与华盛顿大学在北冰洋波弗特海进行了冰下远程水声移动通信定位试验,试验中通信距离超过400 km 时的通信速率仍可达每秒数比特,成功地解决了滑翔机水下通信和定位的问题。
目前,我国关于极区声学导航的研究尚停留在声学信道特性等基础理论研究层面。2014 年,我国第6 次北极科考中首次设立了水声学的科考内容,当时我国北极声场特性研究尚处于空白状态,北极声学数据亦极为稀少;2016年,我国中科院声学研究所科考人员第1 次前往北极开展声学试验;此后每年北极科考中均包含水声学的考察内容,特别是在第9 次北极科考中开展了为期15 天的北极及毗邻海域声学导航试验,获取了大量实测数据,为北极声场特性的研究提供了有力支撑。
2018 年初,哈尔滨工程大学和俄罗斯远东联邦大学、俄远东国立渔业技术大学就成立“北极海洋环境与声学技术联合实验室”达成框架协议,国内其他单位也相继在该领域开展了工作。分析现有文献可知,目前国内在极地冰区海域水声环境特性、目标声特性、典型冰区水下声信道信息传输等方面取得了初步进展[63-65],但在极地声学信号处理研究领域仍处于起步阶段,缺乏极区声学实验经验及常规观测系统。关于极地海洋环境综合观测及参数获取、极地海洋水声波导效应及应用等基础理论及应用的研究亟待加强,以此推动我国极区环境下声学导航系统的适应性改进。
3.5 极区电子海图
在极区电子海图数据方面,2013 年中远集团旗下的“永盛”轮首航极区,便安装有中远集团自主研发的SEAPARD 系列电子海图产品,但并未明确提及电子海图数据的覆盖范围。此外,我国出版的中国官方海图中,尚未包含极地地区的海图。北冰洋大部分水域,尤其是北纬75°以上根本没有海图。因此,电子海图系统中也没有任何航海信息。目前,我国舰船使用的电子航海图系统主要以沿海低纬度海区图为主。而北极沿岸国家(如美国、俄罗斯、加拿大等)均已发布本国北极近海海域电子海图数据。英国海道测量办公室电子海图软件中极区民用航海图已基本覆盖北极近海海域[66],最高可达80°N,但在北极点周围海域仍存在大量空白。
在极区导航图投影方面,国外研究较早,但多集中于航空图领域,主要在导航方法基础上对极区投影方式展开探讨,以定性分析为主,缺乏对其变形特性及误差分布特性等方面的定量分析,而极区海图投影相关文献则多集中于2010 年后且数目相对较少。2012 年,李树军等[67]从海图投影、制图资料、专题符号、海图分幅等4 个方面,研究了当前编制北极地区航海图需解决的关键问题,是国内极区航海图研究的开端。2013 年,Skopeliti等[68]探讨了电子海图中极区航海图应采用的投影方式,建议北极区域使用等距离方位投影和等角方位投影,是国外第一次在公开文献中专门从极区航海导航的角度,对海图投影进行较系统和深入的研究。目前极区常用的海图投影方式主要包括极球面投影、横轴墨卡托投影和日晷投影[69]。
极球面投影是以地球极点S(或N)为视点的透视方位投影(图8),其投影平面P 相切于另一地球极点N(或S)或割于某一纬线。通用极球面投影(UPS)是1989 年美国国防制图局(DMA)推荐北纬84°至北极和南纬80°至南极间的区域应用的投影方式。Naumann[70]对极球面投影上用直线代替大圆航线所造成的航向误差和位置误差进行了定性分析;温朝江等[71]在此基础上做了定量分析,结果显示极球面投影可满足极区海图投影要求。此后,温朝江等[72]对极球面投影下的海图分幅、精度、对应航法、正反解公式等方面展开研究,提出了极球面海图的自动分幅设计算法;分析了双重极球面投影在极区的变形规律,证明双重极球面投影海图与极区地球椭球体模型相吻合,可满足高精度极区航海导航的需要[73];给出了极球面投影格网坐标与地理坐标系间的正反解公式[74];推导了极球面投影海图上大圆航线和等角航线的方程,定量分析两者间的差异,提出了一种基于大地纬度的等距量距法,解决了极球面海图上精确量距问题[75],并扩展应用至双重极球面投影海图上[76];随后又提出了一种基于极球面投影的极区格网等角航线,可与格网导航、极球面投影精确配合,应用于极区航行[77]。

图8 极球面投影Fig. 8 Polar stereographic projection
横轴墨卡托投影是一种等角横切圆柱投影(图9),将圆柱面与地球椭球体上某一经线相切,其圆柱的中心轴与赤道平面重合。通用横轴墨卡托投影是前苏联的大比例地形制图所采用的投影方式[21]。Peter[78],Gdowski[79],Karney[80]等推导了球体横轴墨卡托与椭球体横轴墨卡托投影的计算公式。李忠美等[81]推导了极区横轴墨卡托投影的非奇异公式。英美等国相关文献中通常将高斯投影也称为横轴墨卡托投影[82-83],而我国学者在早期研究中常将二者区分开,各国间存在认知差异。因此,李忠美等[84]针对高斯投影与横轴墨卡托投影间的联系进行了严密的数学推导,证明高斯投影与横轴墨卡托投影间具有等价性,故高斯投影的长度变形、角度变形等特性与横轴墨卡托投影一致。王海波等[85-86]构建基于横向地球模型的横轴墨卡托海图,并提出了基于横轴墨卡托海图的极区航行方法。温朝江等[87]推导了基于双重投影的横轴墨卡托投影方法,可消除与导航系统采用的地球模型不同产生的误差,满足极区高精度航海导航需要。

图9 横轴墨卡托投影Fig. 9 Transverse Mercator projection
日晷投影是一种视点位于球心O的透视方位投影(图10)。《中国航海图编绘规范》(GB 12320-1998)规定纬度75°以上区域采用日晷投影。日晷投影的研究多集中于2000 年以前且已经较为成熟。1984 年,华棠[88]研究了基于双重投影的日晷投影方法,有效提升了海图精度;1990年,杨启和[89]改进了球心投影,改善了制图区域的变形分布,开拓了日晷投影的应用前景;2000年,丁佳波[90]在双重日晷投影法基础上进行了深入分析,阐明了椭球面日晷投影的重要特性及应用。
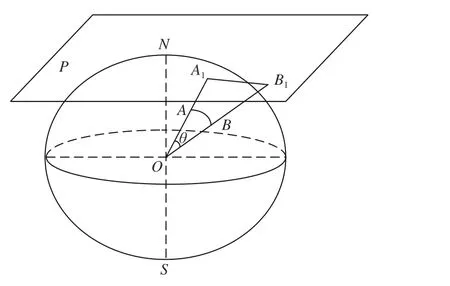
图10 日晷投影Fig. 10 gnomonic projection
海图投影相关文献中还包括对各海图投影间的对比分析,张晓平等[91]推导了极区球面高斯投影非奇异公式,并结合日晷投影进行了长度变形定量分析,本文在此基础上,进一步定量分析了极球面投影长度变形,如表2 所示,其中,φ为纬度, λ为经度。由于高斯投影与横轴墨卡托投影的等价性,可认为极球面投影与横轴墨卡托投影长度变形小于日晷投影。李厚朴等[69]研究了极球面投影、横轴墨卡托投影和日晷投影的直接变换问题,系统推导了任意2 种投影间的直接变换公式,供极区海图投影变换和航海导航参数计算使用。

表2 极球面投影、高斯投影及日晷投影在高纬度的长度变形对比Table 2 Length deformation comparison of polar stereographic projection, Gaussian projection and gnomonic projection in high latitude
4 结 语
导航系统作为海洋运载器的航向安全保障,在我国的极区发展战略中起着重要作用。本文通过比对极区与中低纬度区的环境差异,详细分析了极区环境的特殊性及其对导航系统性能的影响,并结合理论分析,对惯性导航、卫星导航、声学导航、海图等船用导航系统在极区的研究现状作了全面阐述。展望未来,我国极区船用导航技术将朝着以下几个方向发展:
1) 地形匹配技术。地形匹配导航作为一种自主性、无源性的导航系统,适合在极区恶劣环境下使用,其应用主要受制于极区海底地形数据的匮乏。在海底地形测绘领域,同以往常用的宽波束回声测深仪相比,多波束测深系统拥有波束窄、横向覆盖范围大、效率高等特点,在冰覆盖区亦可使用,且可绘制海底的三维地图,适用于极区地形大面积的精确测量。随着多波束测深技术的逐渐成熟,极区海底地形测绘的难度大大降低,获取数据更为详实,制约极区地形匹配技术的主要因素将在未来数十年内得到解决,届时地形匹配将成为极区重要的辅助导航系统。
2) 极区定位、导航、授时(PNT)系统。极区PNT 体系是我国国家综合PNT 体系建设的重要组成部分,可以为用户提供精确、连续、可靠的位置、时间和速度信息。为保障PNT 建设,需要提供基于不同原理的冗余信息源以及相应的多源信息融合技术。对极区水面和水下应用环境而言,需结合不同环境对舰艇导航能力的差异需求,完善各船用导航系统的适应性改进,并针对现有导航系统在极区精度连续性较差的问题,研究低品质观测下的多源信息融合技术。
3) 极区船用导航系统仿真验证与评估技术。在船用导航设备进行适应性改进后,导航设备需通过试验与评估,对关键技术突破情况进行验证,以便规避风险。而极区地处高纬度地区,距我国本土较远,环境恶劣,每年可供航行的“窗口期”时间较短,实测数据获取难度较大;同时,极区在地球运动学、地球物理场环境的特殊性,导致在中低纬区无法复现真实的物理场景,造成陆上实验亦难以实现。构建适用于极区的导航系统综合性能评估体系,通过仿真验证来实现对极区船用导航系统综合性能的评估,可作为未来极区实地测试的补充,有效规避风险。
猜你喜欢
军民两用技术与产品(2021年7期)2021-10-13 08:12:10
环境技术(2021年2期)2021-07-03 14:54:00
航海(2020年4期)2020-08-17 16:13:40
湖北农机化(2020年4期)2020-07-24 09:07:44
火力与指挥控制(2019年11期)2020-01-08 03:33:10
少林与太极(2018年9期)2018-09-28 08:37:34
孙子研究(2016年4期)2016-10-20 02:38:06
工业设计(2016年11期)2016-04-16 02:50:07
中国惯性技术学报(2015年1期)2015-12-19 13:11:49
测绘科学与工程(2014年6期)2014-02-27 07:06:19
