
An active vibration control method based on energy-fuzzy for cantilever structures excited by aerodynamic loads
2021-10-27 09:07WeiLIUWeixioLIUMengdeZHOULinlinTANGQinqinWANGZhengqunWENZhungYAOXiojingYUAN
CHINESE JOURNAL OF AERONAUTICS 2021年9期
Wei LIU, Weixio LIU, Mengde ZHOU,*, Linlin TANG, Qinqin WANG,Zhengqun WEN, Zhung YAO, Xiojing YUAN
a Key Laboratory for Precision and Non-traditional Machining Technology of the Ministry of Education, Dalian University of Technology, Dalian 116024, China
b AVIC Aerodynamics Research Institute, Shenyang 110034, China
KEYWORDS Active vibration control;Cantilever structure;Fuzzy logic;PD controller;Vibration energy analysis
Abstract In wind tunnel tests for the full-model fixed with sting,the low structural damping of the long cantilever sting results in destructive low-frequency and large-amplitude vibration.In order to obtain high-quality wind tunnel test data and ensure the safety of wind tunnel tests,an energy-fuzzy adaptive PD (Proportion Differentiation) control method is proposed. This method is used for active vibration control of a cantilever structure under variable aerodynamic load excitation, and real-time adjustment of parameters is achieved according to the system characteristics of vibration energy. Meanwhile, a real-time method is proposed to estimate the real-time vibration energy through the vibration acceleration signal, and the average exciting power of aerodynamic load is obtained by deducting the part of the power contributed by the vibration suppressor from the total power. Furthermore, an energy-fuzzy adaptive PD controller is proposed to achieve adaptive control to the changes of the aerodynamic load.Besides, the subsonic and transonic experiments were carried out in wind tunnel, the results revealed that comparing to fixed gain PD controllers, the energy-fuzzy adaptive PD controller maintains higher performance.
1. Introduction
To test the performances of the aircraft under different wind speeds and attack angles,the unpowered scaling aircraft model needs to be fixed in the wind tunnel with a certain attitude and the performances are tested by accurate measuring equipment.In order to decrease the effect of the flow field around the aircraft model, a cantilever-like structure with small influence to the flow field is adopted to support the aircraft model. Since this structure is a typical cantilever with mass distributed at the free end,it possesses a low dynamic stiffness.Then,the severe vibration in pitch plane is excited when the structure is exposed to subsonic or transonic flow, and then the quality and credibility of the data are seriously affected as well as the safety of the wind tunnel tests.Therefore,a reliable method should be developed to counteract the destructive vibration.
Structural vibration control can be divided into passive control and active control. Glaese et al.designed a wheel hub damper to reduce the vibration of the wind tunnel spikes and conducted prototype tests.However,it is not advisable to use passive methods to redesign the supporting structure,because this will undoubtedly change its optimal aerodynamic shape and thus cause interference to the results.In view of the experimental structure of cantilever beam,Ozer et al.designed and built a set of beam type dual dynamic vibration absorber.Through experiments, it is found that the designed vibration suppression device can control the vibration of different frequencies. But the vibration absorber takes up a lot of space.Cheng et al.proposed a semi-passive vibration control method. The device used electromagnetic switch and damper to design experimental device. The switching system works designed by Balakrishna et albased on the coil voltage and shows some damping effects. Since the permanent magnet, it is suited to the occasion insensitive to magnetic field.Since passive vibration absorbers cannot track the modal frequency shifts induced by the change in the experimental environment based on Mach number and attack angle,their effects are also limited.
In order to obtain an more effective vibration control method, researchers have done a lot of work on the active vibration control methods. Shao and Chendesigned an electromagnetic damping structure,which is installed in the cavity of the model. In terms of control strategy, velocity feedback controller is usually used in active vibration control, thus reducing the amplitude response of the system. They designed a compensator to eliminate the time delay caused by filters,which improves the effect of velocity feedback control. Chen et al.applied PD controller in its research and the effectiveness was tested in the low speed wind tunnel. The research mainly concentrates on the vibration of large-scale aircraft model with a low response speed in low speed wind tunnel.
With the development of intelligent materials, the active vibration control with piezoelectric intelligent materials has obtained more satisfactory effect than the passive control. In terms of structure design,Fehren et al.from ERAS and European Transonic Wind tunnel(ETW)applied piezoelectric actuator to actively attenuate the vibration of sting support models for the first time, and designed an active absorber located between the balance and the supporting structure.Balakrishna and Rivers et al.from ViGYAN Inc and NASA Langley Research Center designed two kinds of active dampers located respectively in the tip and the root of the sting, and the effect of the dampers are verified on the National Transonic Facility.In terms of controller design, Maurya and Bhandariproposed a hybrid fractional order PID (Proportion Integration Differentiation) controller which used traditional PID control Ziegler-Nichols method to set the proportional constant and integral constant of PID controller. Simulation results given the better step response as compared to classical PID controller. However, this method can only realize PID optimize tuning once,which cannot meet the request of dynamic tuning in real time.Intelligent PID control is the combination of intelligent control and traditional PID control, the controller design idea is to introduce neural network technology, fuzzy control, expert knowledge, etc. into the controller to realize the intelligent adjusting of PID parameters,and better control performance is got than the traditional PID control. With the change of wind tunnel test system, PID parameters need to be adjusted, so neural network can be used for system identification and control. Mohamed et al.used multi-layer perceptron (MLP) neural network to get PID controller parameters. Through experiments, it was found that neural network PID control method can resist external interference and has good robustness. Guo et al.proposed an adaptive PID controller which was based on BP neural network.Experimental results shown that the output characteristic of the adaptive PID controller based on neural network is good.However, the adaptive PID controller based on neural network needs a long training time and cannot adapt to the instantaneous change of the system.
In addition,fuzzy PID controller has been widely used.Patil and Borasedetermined the parameters of the fuzzy PID controller by calculating the proportional integral derivative. The results shown that the method was practical and robust for calculating the scaling factor from PID gain. In order to solve the nonlinear problem of the hydraulic servo system,Gao and Heproposed an adaptive fuzzy PID control method to control the valve hydraulic servo test bench.The simulation results revealed that the steady-state error can be efficiently reduced.In order to control the speed of brushless dc motor, Arulmozhiyal and Kandibanproposed an improved fuzzy PID controller under the same operating conditions, the test results shown that the performance output of the speed control system was better. In order to control the height of the quadrotor, Fahmizal et al.proposed a fuzzy self-tuning PID controller. The performance of the quadrotor in the real environment is improved. Ram and Lincolnproposed a new fuzzy adaptive variable digital PI(Proportion Integration)controller for a non-linear spherical tank level process system.The overshoot is less and the settling time is faster than digital PI controller. N. Kanagasabai and Jayadeveloped a PID controller scheme for three-pot process based on fuzzy control. Comparison with other controllers revealed that fuzzy gain scheduling control is superior in smoother output without oscillations. Liu et al.proposed an active damping vibration control system for wind tunnel models based on a self-adaptive fuzzy PD control algorithm and a certain effect has been achieved.However,in the current research,the system characteristics are not taken into account and the control is with a low precision and poor anti-interference ability.As the complexity of the controlled system gets higher and higher, the change of system parameters is also rapid and continuous,so the fuzzy PID controller is also not suitable for this kind of environment.
The expert system technology made it possible to construct expert tuners for PID controllers.Singh and Kaurcombined expert knowledge with fuzzy rules to determine the parameters of the controller.The experimental results shown that the controller has better control performance. Kala et al.designed the PID controller and fuzzy controller of liquid level process with expert knowledge. The results shown that the controller design based on fuzzy logic have a better effect. Hao et al.proposed an algorithm combining of expert knowledge and PID called IEI-PID.This method is better than other PID control methods regardless of the delay. Suryanarayana and Mishraproposed a dc link transient monitoring method based on fuzzy logic and expert knowledge.The results shown that the gain of the controller is transient stability. From the above,it can be seen that the method combining expert knowledge with fuzzy PID control has a larger application range and better output results.The fuzzy PID controller combined with expert knowledge can improve the anti-interference of the system and avoid the deviation caused by the calculation error of the dynamic characteristics of the controlled object.
Much research work has been carried out on the vibration control method of the long cantilever structure in wind tunnel.However, many scholars conducted the research on ideal method, the system characteristics are not taken into account,thus the control is with a low precision and poor antiinterference ability.Moreover,the existing controllers can only realize parameters optimize tuning once, or dynamically tune the parameters with a long training time, and it cannot adapt to the instantaneous change of the system. The method combining expert knowledge with fuzzy PID control introduces a new approach. In this paper, an energy-fuzzy adaptive PD control method for active vibration control of cantilever structure excited by variable aerodynamic load is proposed to realize the adjustment of parameters in real-time according to the vibration energy characteristics of the system.
The remainder of this paper is organized as follows.Section 2 introduces the active vibration control method based on energy-fuzzy for wind tunnel models. Section 3 presents a real-time method to estimate the real-time vibration energy through the vibration acceleration signal and obtain the average exciting power of aerodynamic load. In Section 4, an energy-fuzzy adaptive PD controller is proposed to achieve adaptive control response to the changes of the aerodynamic load. In Section 5, subsonic and transonic experiments were carried out based on an active vibration control system with stackable piezoelectric actuators in wind tunnel. Finally, the conclusion is drawn in Section 6.
2. Active vibration control method based on energy-fuzzy
In this paper, an adaptive control strategy is proposed based on the energy characteristic of the vibrating cantilever-like structure in subsonic or transonic wind tunnel.Vibration energy and the average exciting power of aerodynamic load are selected as the reference condition of structural vibration which are able to represent different vibration states when the structure is suffering from different excitations from different wind speeds and attack angles. On this basis, combining with fuzzy PID control, the proportion coefficient and differential coefficient are automatically adjusted to achieve adaptive control to the changes of the aerodynamic load.
As shown in Fig.1,the control strategy is mainly composed of two functional parts. One is PD control loop using acceleration signal as feedback.The control output of a PD controller is expressed as

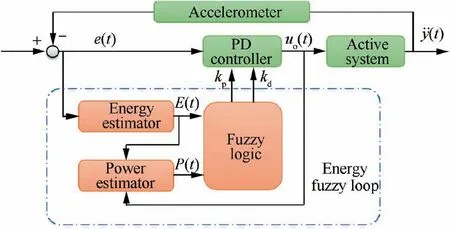
Fig. 1 Control scheme of energy-fuzzy adaptive PD control.
where kand kare respectively the proportional and derivative gains,e(t)is the error between the reference and the actual output. The other part is the energy-fuzzy loop which is employed to adjust the proportional and the differential coefficients in real time based on the vibration energy stored in the system E(t) and the aerodynamic load excitation power P(t).In the energy-fuzzy loop, all vibration energy stored in the vibrating system is estimated through the acceleration of the system¨y(t),which characterizes the current vibration intensity,meanwhile, the average exciting power of aerodynamic load is obtained through excluding the part contributed by the vibration suppressor, which characterizes the vibration trend.Finally, the two vibration states are used as the reference inputs and a fuzzy logic is designed to achieve adaptive control. The control strategy considering vibration intensity and vibration trend makes the active vibration control system better adapt to the complex loading conditions in wind tunnel.
3. Estimation of vibration energy and aerodynamic exciting power
The energy accumulation and dissipation of the vibrating system comes from the work of wind tunnel aerodynamic load and the vibration suppressor. On basis of the analysis of cantilever like vibration, a simple and real-time method is proposed to estimate the real-time vibration energy of the system through the vibration acceleration signal. Then the average output power model of the vibration suppressor is established, and the average exciting power of aerodynamic load is obtained by deducting the part of the power contributed by the vibration suppressor from the total power calculated from the system’s increment of vibration energy. At last, the vibration energy and the average exciting power of aerodynamic load are employed as the reference input for the fuzzy adaptive controller, and they cooperate to guide and adjust the gain of the feedback vibration control system.
3.1. Energy estimation of the vibrating aircraft model in wind tunnel
In this paper, a method is proposed to estimate the vibration energy stored in the vibrating system in real time employing the acceleration from the barycenter of the aircraft model.The piezoelectric intelligent sting is installed in the stable attack angle adjustment mechanism,so the stiffness of the supporting mechanism after the constant section is large enough,and the deformation in the constant section is merely taken into consideration without introducing errors which cannot be ignored.The vibration energy is accumulated when the system is stimulated by the aerodynamic load in the form of kinetic energy and potential energy. Kinetic energy is composed of the kinetic energy in the aircraft model and the kinetic energy stored in the sting, potential energy is composed of the elastic energy stored in the sting and the gravitational potential energy of the aircraft model. To further analyze the energy state of the system, the motion during the vibration in wind tunnel tests is described and analyzed. When vibration occurs under aerodynamic excitation,the deformation and position of the sting and the aircraft model at time t is shown in Fig. 2.The vibration displacement,velocity and acceleration of the system in the pitching plane at the barycenter of the aircraft model are described as
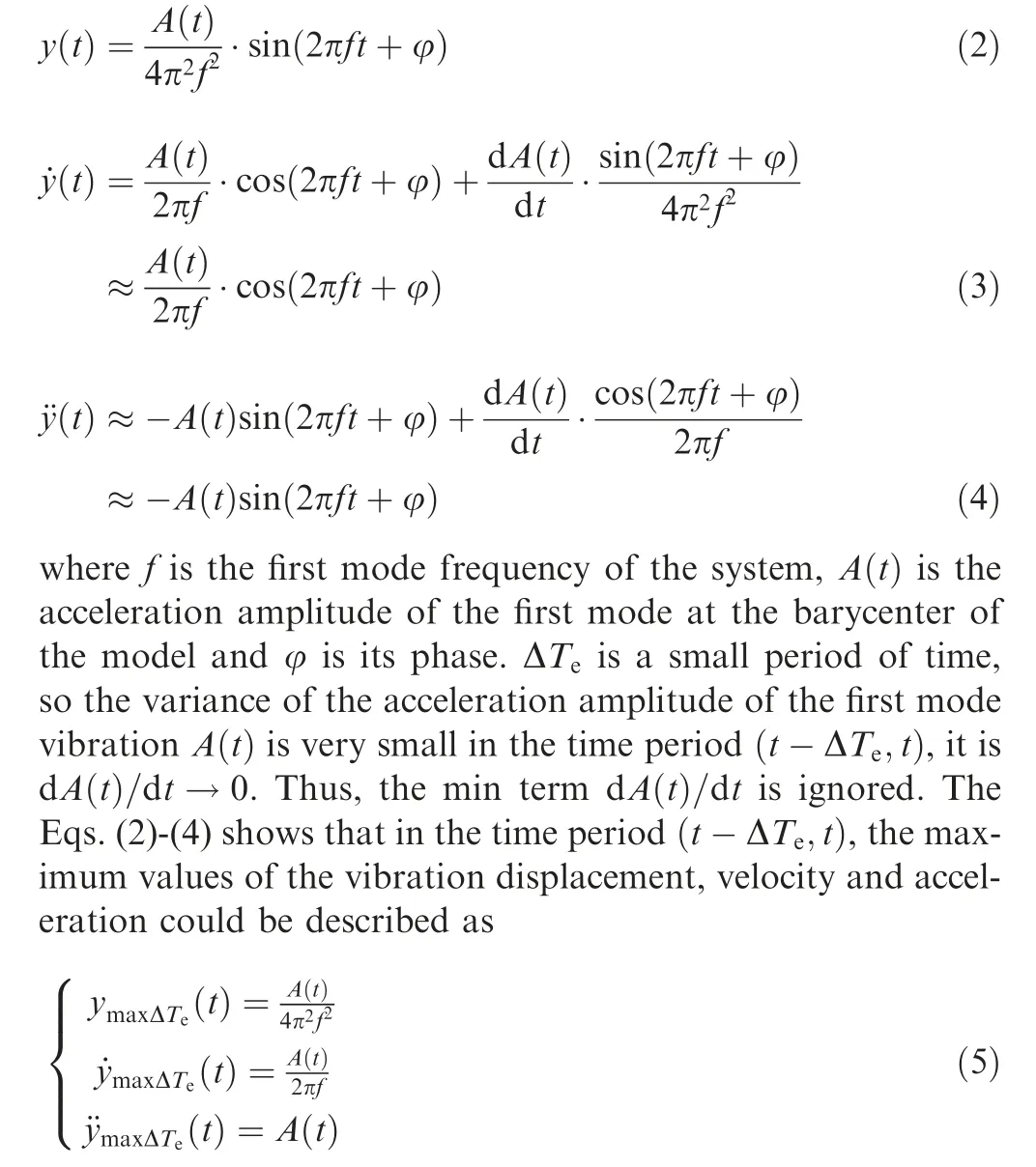
In practical applications, with acceptable accuracy, the deformation distribution of an elastic beam structure at first mode under dynamic condition could be generally approximated represented as its deformation distribution under static condition. Therefore, the dynamic deflection equation of the sting can be approximated represented as
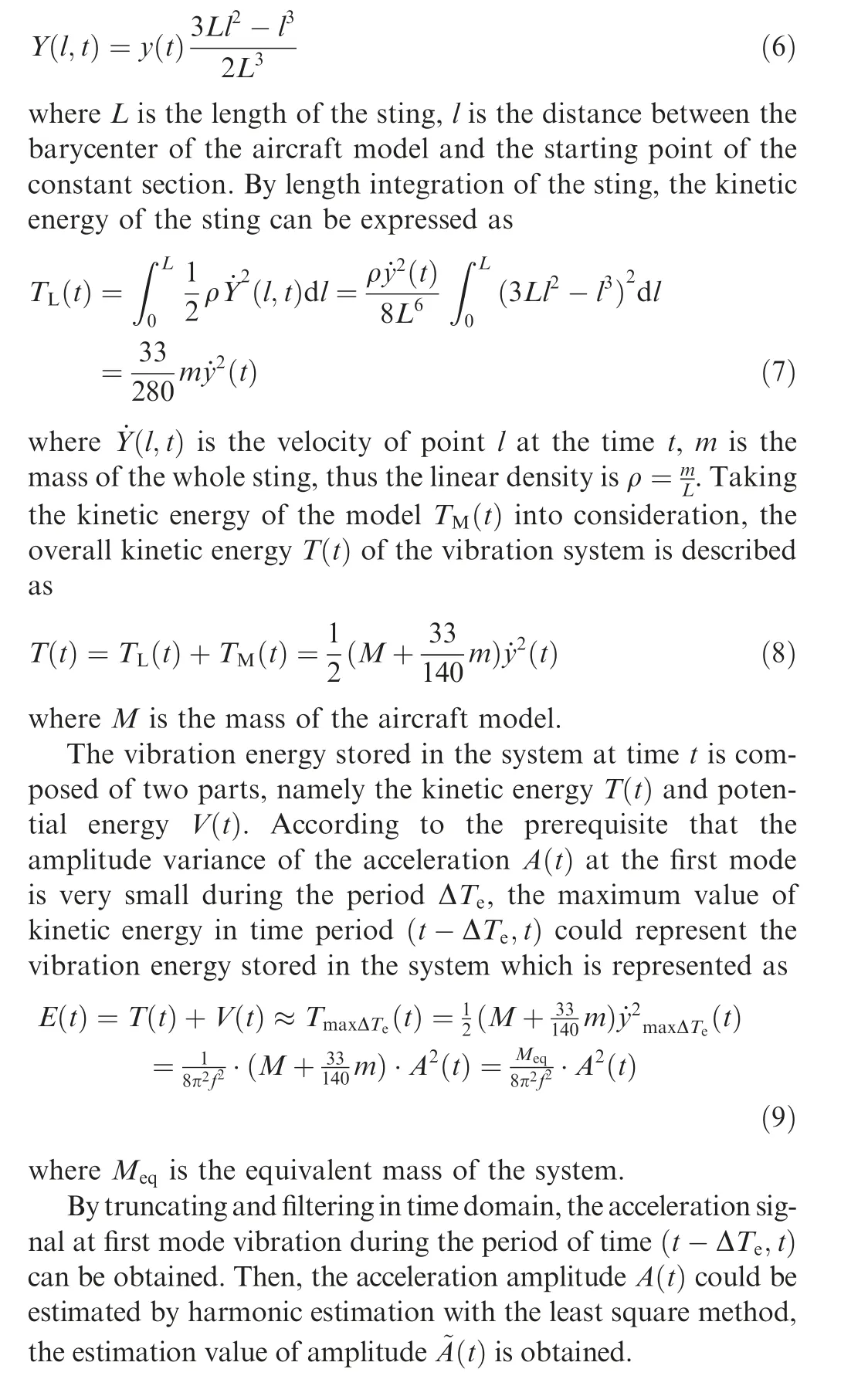
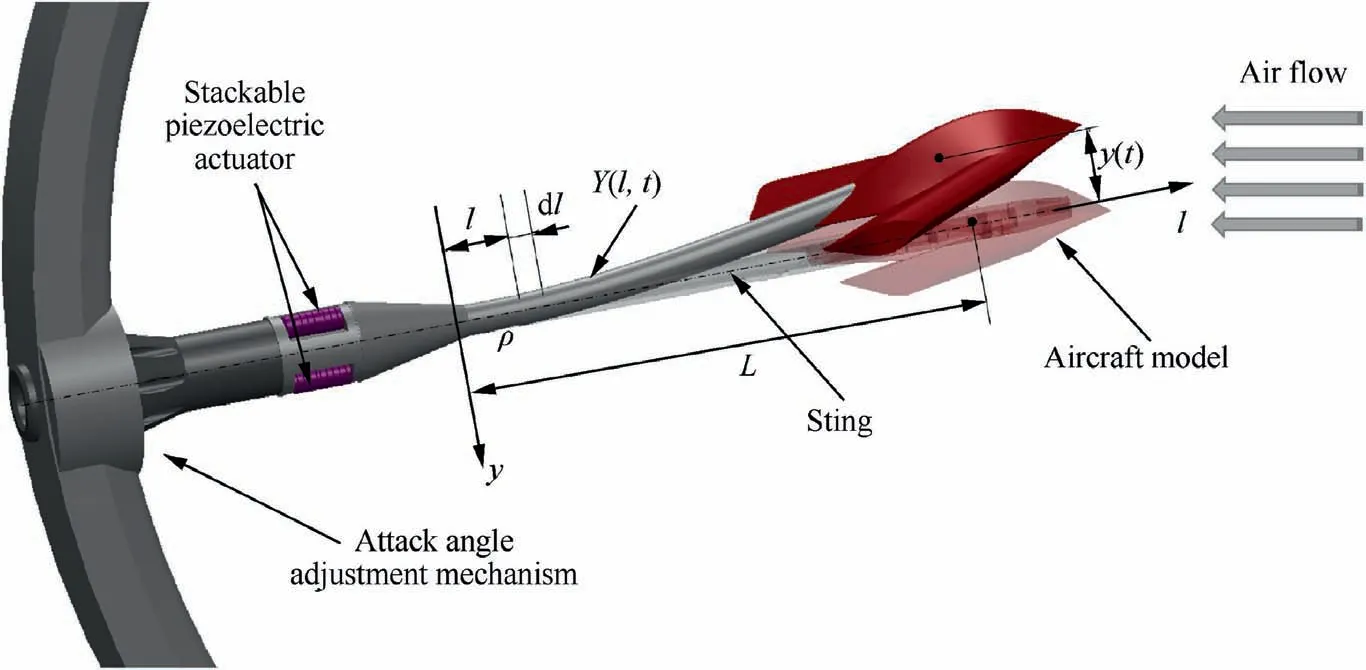
Fig. 2 Deformation of supporting sting at time t.
At last,the real-time estimation of the vibration energy can be solved by selecting an appropriate time constant ΔTof the estimator, which is described as

3.2. Power estimation for the excitation of aerodynamic load
To estimate the exciting strength of the aerodynamic load and evaluate the trend of the vibration, the average output power model of the vibration suppressor is established. The total power is calculated from the accumulated energy increment of the system, and then the average exciting power of aerodynamic load is obtained through excluding the part contributed by the vibration suppressor.
3.2.1. Estimation model for the output force of vibration suppressor
In wind tunnel test,when the aircraft model vibrates,the compression state of a stackable piezoelectric actuator embedded in the vibration suppressor is shown in Fig. 3.
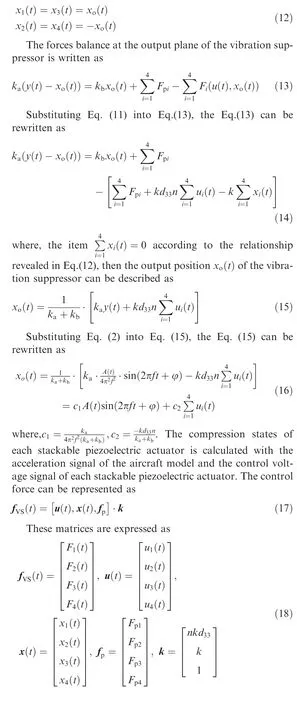
The stackable piezoelectric actuator is embedded in the root of the sting, and the coordinate axis xis defined along the extension direction of stackable piezoelectric actuator i.When the supporting system is in its balanced position, the coordinate of stackable piezoelectric actuator’s output surface is 0.Since the frequency of the vibrating system is much smaller than the response frequency of the stackable piezoelectric actuator,the output force,the control voltage and the actual elongation can be approximately expressed by the static output equation of the stackable piezoelectric actuator. The output force of a stackable piezoelectric actuator is expressed as

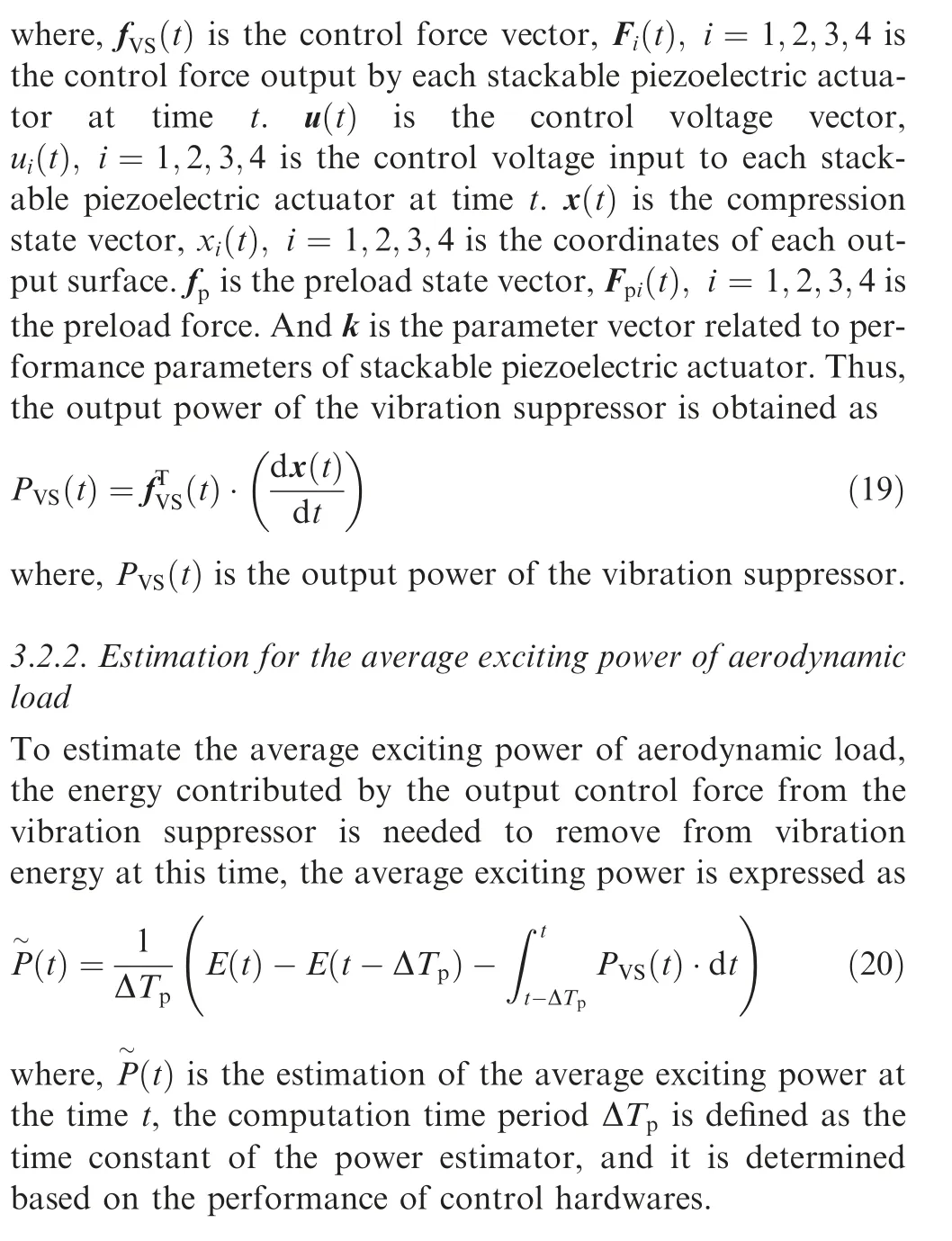
where F(t)is the output force of the ith stackable piezoelectric actuator at time t, k is the stiffness of the ith stackable piezoelectric actuator,x(t)is the compression state,dis the strain coefficient of a single piezoelectric sheet layer in stackable piezoelectric actuator, n is the number of layers in a stackable piezoelectric actuator,u(t)is the control voltage and Fis the preload force of the ith stackable piezoelectric actuator.
To establish the relationship between the stackable piezoelectric actuator’s compression state x(t), the control voltage u(t) and the vibration displacement y(t), a simplified single degree of freedom (DOF) model of the supporting system is constructed, which is shown in Fig. 4.
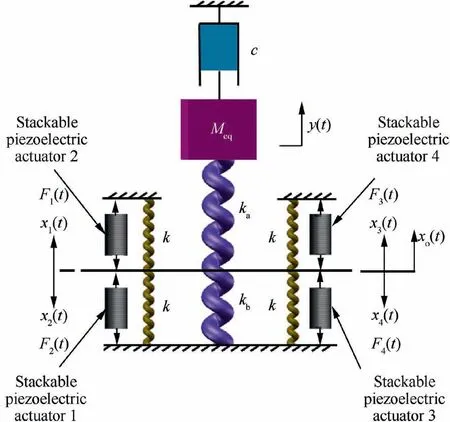
Fig. 4 1-DOF model of active supporting system.
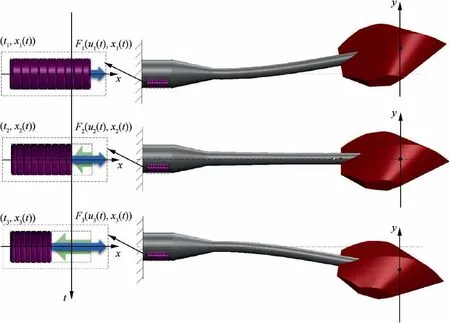
Fig. 3 Compression states of a stackable piezoelectric actuator when aircraft model vibrates.
In Fig.4,c is the damping coefficient.Because of the structural characteristics of the supporting system, the equivalent stiffness kat the constant section part is far smaller than the equivalent stiffness kstackable piezoelectric actuators are placed at the root of the sting,and the stiffness k of stackable piezoelectric actuator is much smaller than structural stiffness kof vibration suppressor as well. The output position x(t) of the vibration suppressor is shown in the Fig. 4. Same as the definition of output surface,the coordinate of the output position is 0 when the system is in the equilibrium position.So,the relationships between the coordinates x(t)of the each output surface and the output position x(t)of the vibration suppressor are expressed as
4. Energy-fuzzy adaptive PD control method
In Section 3, the energy state of the vibrating system can be obtained in real time. The vibration energy and the average exciting power respectively evaluate the vibration state of the system from the real-time vibration intensity and the vibration trend. The vibration state is used as the reference input, and a PD controller based on fuzzy logic is design to achieve adaptive control response to the changes of the vibration states.The principle of energy-fuzzy adaptive PD control method is shown in Fig. 5.

Fig. 5 Principle of energy-fuzzy adaptive PD control method.
With this control method, the acceleration feedback signal is employed to estimate the vibration energy and aerodynamic exciting power, and the energy state is used to schedule the proportion parameter and the differential parameter in a PD controller. The control decision is made by the scheduled PD controller and outputs the control signal which is thereafter amplified by power amplifiers to drive the stackable piezoelectric actuators.
4.1. Language variable and membership function
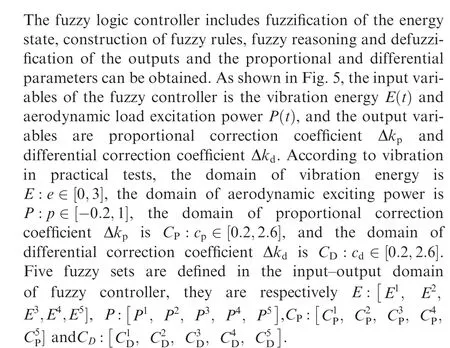
The triangular membership function with linearly distributed fuzzy sets is selected. According to the membership function and its distribution rules, the membership function for the accurate input–output values is determined. As shown in Fig. 6, μ, μ, μand μare respectively the membership degrees of the exact input value of vibration energy e,the exact input value of aerodynamic load excitation power p, the exact output of the proportional correction coefficient cand the exact output of the differential correction coefficient c.
4.2. Fuzzy rules and fuzzy reasoning
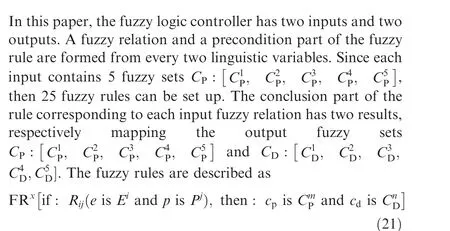
where,FRis the mapping relation corresponded by xth fuzzy rule, e is the input, Eis the ith input fuzzy set of vibration energy, p is the input,Pis the jth input fuzzy set of aerodynamic exciting power, cis the output, Cis the mth output fuzzy set of proportional correction coefficient, cis the output, Cis the nth output fuzzy set of differential correction coefficient.
On the basis of experience in wind tunnel tests, the fuzzy rules are designed which are shown in Tables 1 and 2. With the fuzzy rules, the nonlinear mapping between the inputs and the outputs can be realized.
After the fuzzification of input parameters and the design of the fuzzy rules, the output fuzzy sets and their corresponding
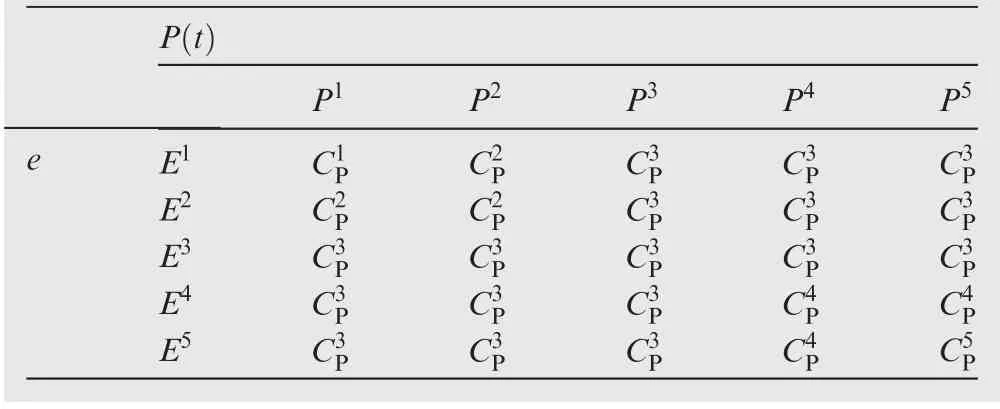
Table 1 Fuzzy rules of Δkp.
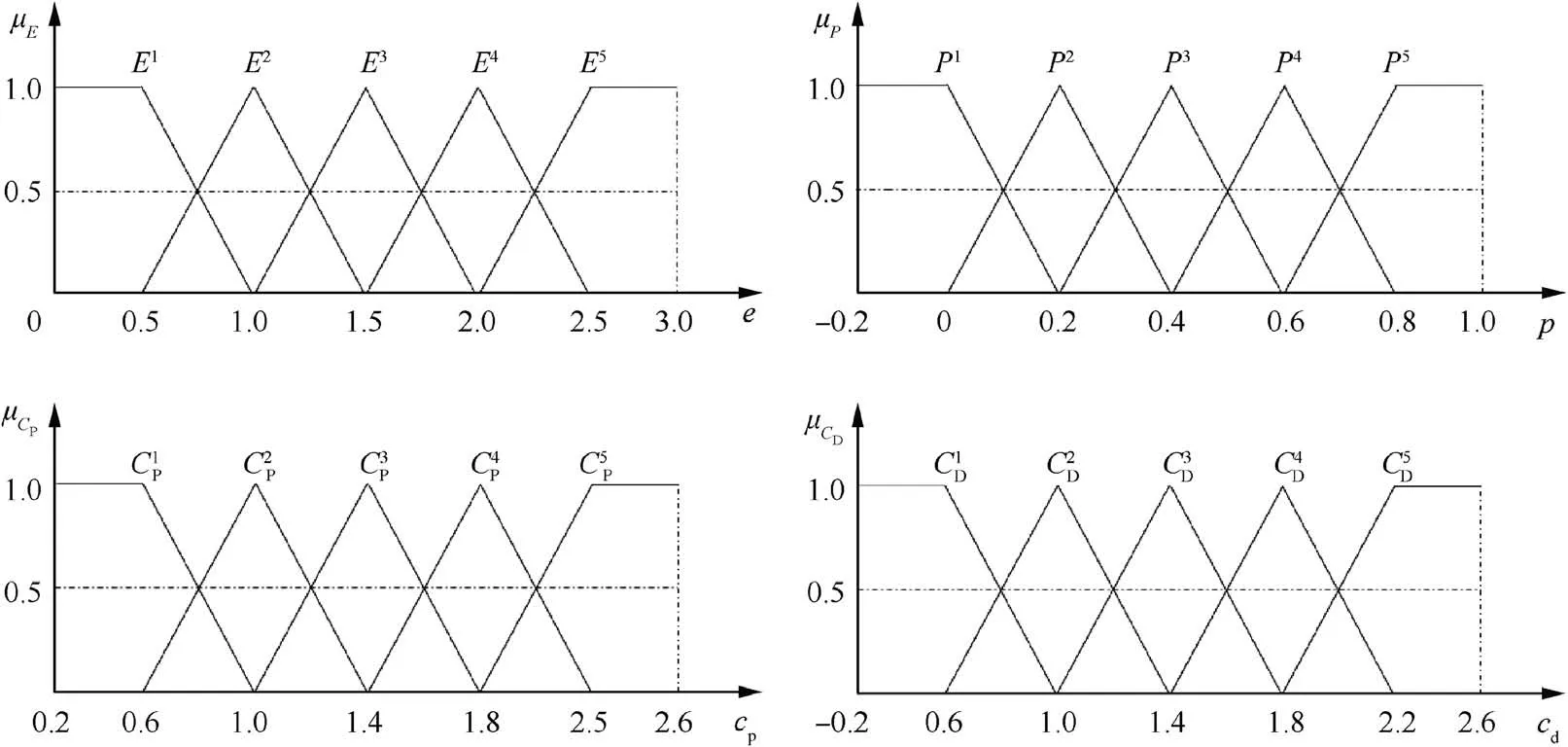
Fig. 6 Membership functions of the input and output fuzzy sets.
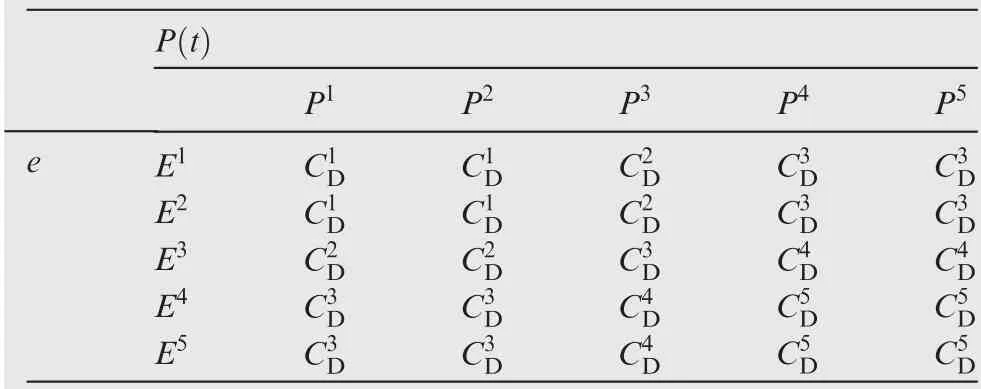
Table 2 Fuzzy rules of Δkd.
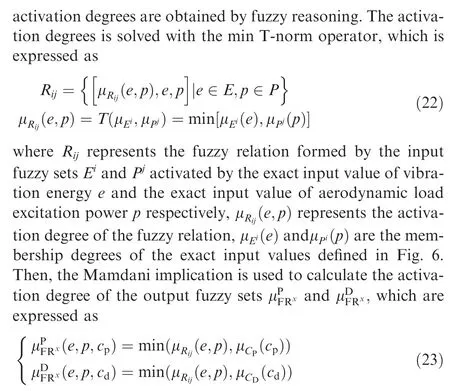
As the exact input values e and p are known,the activation degrees of the output fuzzy sets are respectively the functions of unknown exact output values cand c. μ(c) and μ(c) are the membership degree of the exact output values defined in Fig. 6.
In this article, the center of gravity principle is used to obtain the exact output values from the output fuzzy sets,which is called the defuzzification of the output fuzzy sets.When the vibration energy is eand the excitation power is p, the exact outputs of the fuzzy controller, the proportionalcorrection coefficient cand the differential correction coefficient care determined form
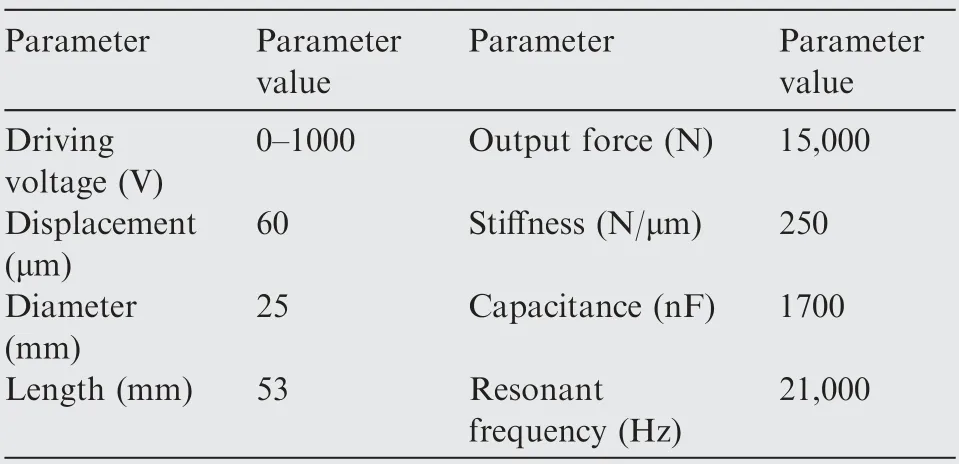
Table 3 Main parameters of stackable piezoelectric actuator.
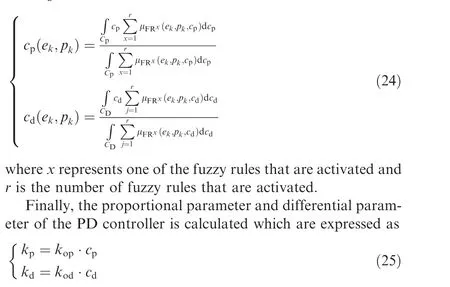
where kand kare the constant initial value of the parameters.
5. Verification experiments in wind tunnel
5.1. Experimental system
An active vibration control system suitable for subsonic and transonic experimental conditions is established to verify the effectiveness of the designed energy-fuzzy adaptive PD controller.
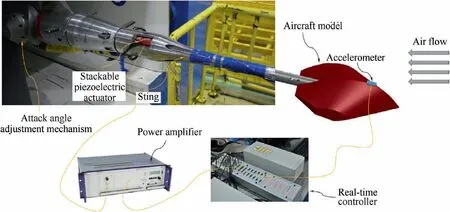
Fig. 7 Active vibration control system with piezoelectric control.
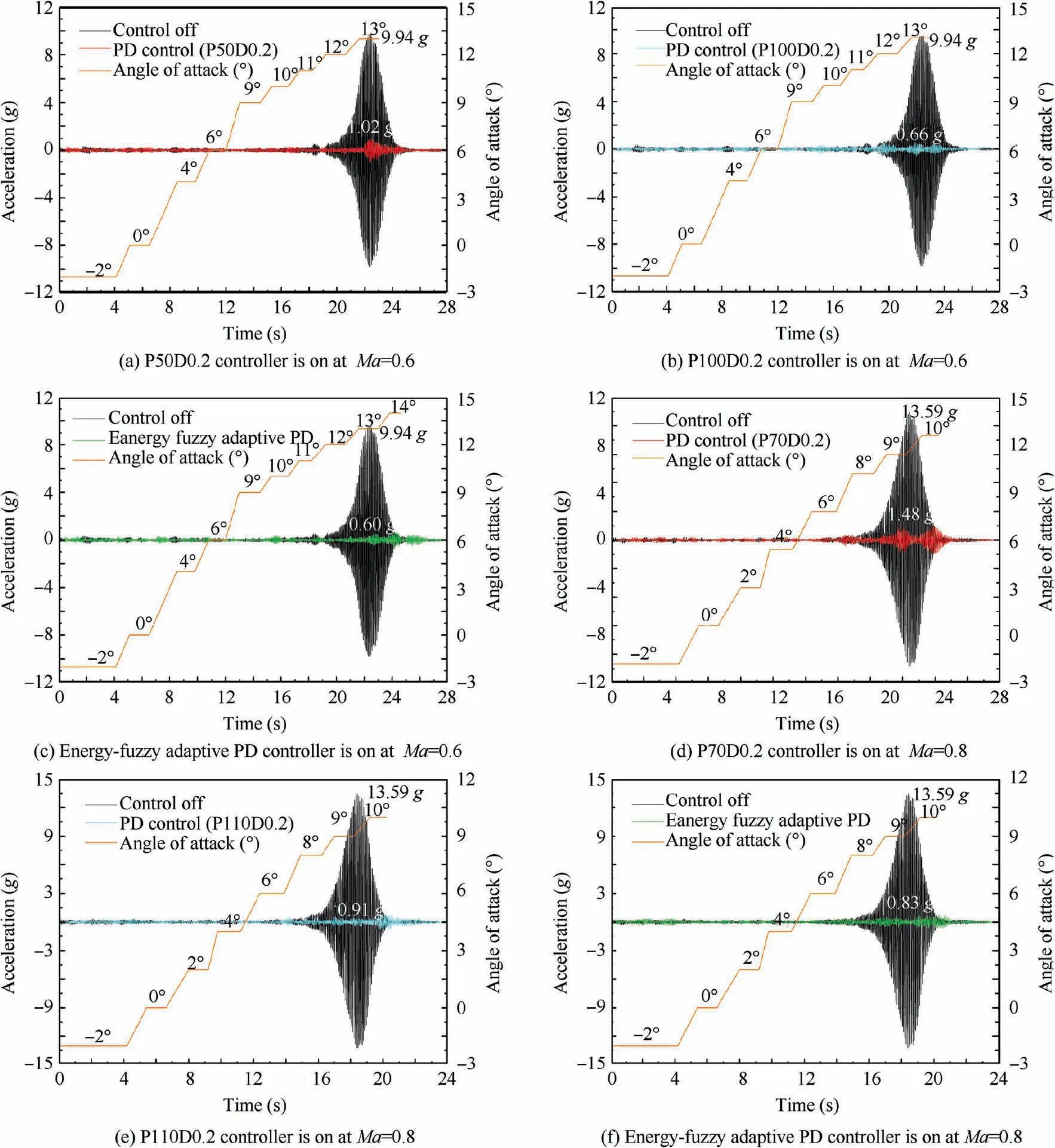
Fig. 8 First mode vibration acceleration obtained at various attitude angles.
As shown in Fig.7,the active vibration control system consists of two groups of stackable piezoelectric actuators,a sting,an aircraft model,an accelerometer,a real-time controller and a power amplifier.The accelerometer is fixed on the barycenter of aircraft model to measure the vibration acceleration in pitch plane, which is feedback to the real-time controller. The realtime controller is used to estimate the energy of the vibrating aircraft model in wind tunnel and the average exciting power of aerodynamic load. Then the control decision is made through energy-fuzzy adaptive PD controller to control the two groups of stackable piezoelectric actuators to resist the aerodynamic load in real time. The parameters of highvoltage piezoelectric actuator are shown in Table 3.
5.2. Subsonic and transonic experiments
In order to verify the feasibility and effectiveness of the active vibration control system and the proposed controller,experiments in subsonic and transonic facilities were performed with attack angle from -2to 13(-2,0, 4,6,9, 10, 11, 12and 13, and the attack angle of 14is only tested when the energy-fuzzy adaptive PD controller is on)and from -2to 10(-2,0, 2,4, 6, 8, 9and 10, and the attack angle of 10is only tested when controller is on),respectively at Ma=0.6 and Ma=0.8. In the experiment, the model vibration conditions for switching the controller on and off were compared respectively.The adaptability of the energy-fuzzy adaptive PD controller and the traditional PD controller are compared. The parameters of the PD controllers are k=50, k=0.2 and k=100, k=0.2 under subsonic condition and k=70,k=0.2 and k=110, k=0.2 under transonic condition respectively.
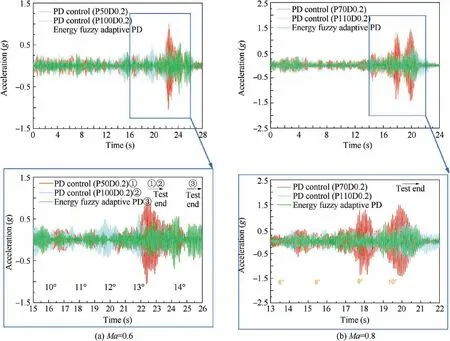
Fig. 9 Comparison of vibration among the three controllers.
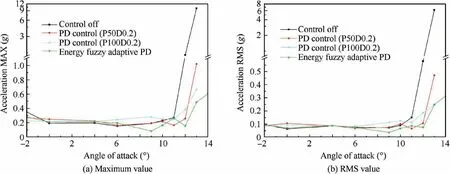
Fig. 10 First mode vibration acceleration at different angles at Ma=0.6.
The first mode vibration signal obtained at various attitude angles are shown in Fig.8,where in Fig.8(a),Fig.8(b),Fig.8(c)are under subsonic condition,and Fig.8(d),Fig.8(e),Fig.8(f)are under transonic condition.It can be seen that the vibration was too excessive to stop testing at 13attack angle, at Ma=0.6 and the maximum is 9.94 g.Furthermore,tests were stopped at 10attack angle,at Ma=0.8 and the maximum is 13.59 g. However, when the active vibration control system is switched on, the vibration of the experimental model was not obvious in the whole range of attack angle.
Then,comparison among the three controllers at Ma=0.6 and Ma=0.8 are shown in Fig.9.In order to further compare the effectiveness of the three controllers, a detailed zoom-in comparison is used to show intense vibrations at certain attitude angles. The acceleration value reach the maximum of 1.02 g at 13and Ma=0.6 (P50D0.2), 0.66 g at 13and Ma=0.6 (P100D0.2), 0.60 g at 14and Ma=0.6 (the energy-fuzzy adaptive PD control), 1.48 g at 10and Ma=0.8 (P70D0.2), 0.91 g at 10and Ma=0.8(P110D0.2), 0.83 g at 10and Ma=0.8 (the energy-fuzzy adaptive PD control).
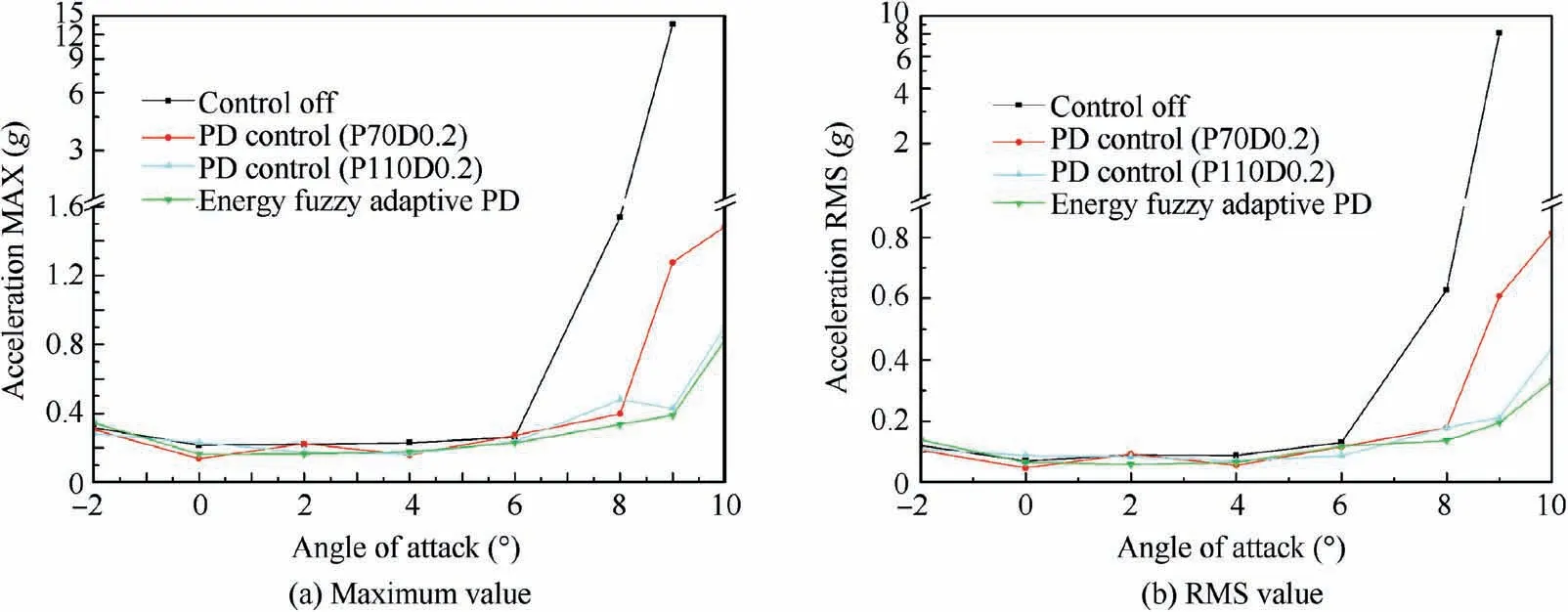
Fig. 11 First mode vibration acceleration at different angles at Ma=0.8.
The vibration signals measured at different attitude angles are analyzed so that the control method can adapt to the changing conditions. The transient response capability and average vibration suppression capability of the controller are evaluated by using the maxima and RMS(Root Mean Square)of the first mode vibration acceleration at different angles.Subsonic experiment results are shown in Fig. 10, and transonic experiment results are shown in Fig. 11.
By analyzing the maximum and the RMS values of the vibration acceleration at different attitude angles, we can arrive at the conclusion that the controller with relatively small parameter performs well at small attitude angles, while performs less effective at big angles. On the contrary, the controller with the critically big parameters performs well at big attitude angles, while induces unexpected disturbance to the system at small angles. For instance, the acceleration value reach the maximum of 0.19 g and RMS of 0.08 g under PD control with the parameters of k=50, k=0.2 at 9attack angle and Ma=0.6, reducing to 32% of acceleration maximum value and 27% of acceleration RMS under PD control with the parameters of k=100, k=0.2 at the same condition. On the contrary, the acceleration value reach the maximum of 0.66 g and RMS of 0.24 g under PD control with the parameters of k=100, k=0.2 at 13attack angle and Ma=0.6, reducing to 35% of acceleration maximum value and 50% of acceleration RMS under PD control with the parameters of k=50, k=0.2 at the same condition.
The phenomenon verifies the difficulty put forward in the introduction that the change of aerodynamic dynamics caused by the variance of attitude angles makes it difficult to effectively suppress the vibration in the whole process of experiments utilizing a set of predetermined PD parameters. This is because that, on the one hand, when the energy storage is low and the aerodynamic excitation is weak, the big control parameters make the damper react excessively to the vibration which will induce self-excited vibration due to velocity feedback,and that,on the other hand, when the energy storage is high and the aerodynamic excitation is strong,the small control parameters cannot fully activate the potential of the damper which result in the speed-up of energy accumulation.The experimental results indicated that the proposed the energy-fuzzy adaptive PD controller could adjust the parameters adaptively according to the accumulated vibration energy and the intensity of aerodynamic excitation,maintaining a proper response in the whole process of an angle-variant experiment.
In addition, in order to avoid self-excited vibration, we have to limit the maximum proportional value when applying a fixed gain PD controller, which greatly restrict the efficiency at big attitude angles.However,the proposed the energy-fuzzy adaptive PD controller can solve this contradiction by starting at a relatively low parameter but rapidly raising the proportional parameter when vibration deteriorates, which greatly improves the performance of the damper and meanwhile maintains stable when vibration is suppressed. According to the experiment results, compared to fixed gain PD controllers,the energy-fuzzy adaptive PD controller maintains higher performance.
6. Conclusions
(1) In this paper, an energy-fuzzy adaptive PD control method for active vibration control of cantilever structure excited by variable aerodynamic load is proposed realize the adjustment of parameters in real-time based on the system characteristic of vibration energy. The control strategy considering vibration intensity and vibration trend makes the active vibration control system better adapt to the complex loading conditions in wind tunnel.
(2) Moreover, a real-time method is proposed to estimate the real-time vibration energy and the average exciting power, on the basis, a fuzzy logic is designed to achieve adaptive control.
(3) A series of subsonic and transonic experiments were carried out in wind tunnel,the feasibility and stability of the energy-fuzzy adaptive PD control method were verified.Comparing to fixed gain PD controllers, the energyfuzzy adaptive PD controller maintains higher performance.
Declaration of Competing Interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Acknowledgements
This research was co-supported by the project of National Key R & D Program of China (No. 2018YFA0703304), the National Natural Science Foundation of China (No.U1808217), and Liaoning Revitalization Talents Program of China (No. XLYC1807086).
 CHINESE JOURNAL OF AERONAUTICS2021年9期
CHINESE JOURNAL OF AERONAUTICS2021年9期
- CHINESE JOURNAL OF AERONAUTICS的其它文章
- Optimal trajectory and downlink power control for multi-type UAV aerial base stations
- Effects of flow parameters on thermal performance of an inner-liner anti-icing system with jets impingement heat transfer
- Effects of wing flexibility on aerodynamic performance of an aircraft model
- Aerodynamic performance enhancement of co-flow jet airfoil with simple high-lift device
- Adaptive fuzzy terminal sliding mode control for the free-floating space manipulator with free-swinging joint failure
- Influence of longitudinal-torsional ultrasonicassisted vibration on micro-hole drilling Ti-6Al-4V